JP6415707B2 - ラチェット工具 - Google Patents
ラチェット工具 Download PDFInfo
- Publication number
- JP6415707B2 JP6415707B2 JP2017517157A JP2017517157A JP6415707B2 JP 6415707 B2 JP6415707 B2 JP 6415707B2 JP 2017517157 A JP2017517157 A JP 2017517157A JP 2017517157 A JP2017517157 A JP 2017517157A JP 6415707 B2 JP6415707 B2 JP 6415707B2
- Authority
- JP
- Japan
- Prior art keywords
- claw
- ratchet mechanism
- ratchet
- sleeve
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B15/00—Screwdrivers
- B25B15/02—Screwdrivers operated by rotating the handle
- B25B15/04—Screwdrivers operated by rotating the handle with ratchet action
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/18—Devices for illuminating the head of the screw or the nut
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
Description
本発明は手工具、より詳細にはラチェット工具に関する。
[従来技術の説明]
ドライバーは、ねじを締めてねじを所定位置に保持するために使用される工具であり、軸と柄とを有する。一般に従来技術のドライバーは、柄に固定された軸を有する。使用時に、柄を握る手は小さい角度でしか回すことができない。このため、要素を何回も続けて回転させる必要がある場合、手を所定角度だけ逆に回すことができるように、工程中に手を数回止める必要がある。その方法の1つは、手で握っているドライバーを一時的に要素から放して、手を逆向きに回すことができるようにすることである。この場合、再びドライバーを要素に差し向ける必要がある。別の方法は、もう一方の手を使用して柄を握っている手が柄を放して逆向きに回ることができるように助けることである。明らかに、二つの方法とも不便であり、それが作業効率に影響し、ねじ頭も損傷しやすい。
3.ラチェットの歯数が少なく、回し戻し中に必要な回転力が大きいため、プレテンション力が小さいドライバーが回されたときに「方向性」特徴が良好に働かない。
加えて、ラチェットドライバーは広く使用されており、弱い照明下又は暗い環境下で使用された場合、通常は追加の照明装置が用いられる。それにより作業が不便になるため、さらなる照明特徴を有するラチェットドライバーが望まれている。
[発明の概要]
本発明の1つの目的は、軸部材がラチェット機構の内部に延在し、かつ単純な構造に設計されて使用が便利な、軸のぐらつきが低減されたラチェット工具を提供することである。
上記の目的を実現するために、本発明は、軸部材と、柄と、ラチェット機構とを備えるラチェット工具を提供し、該ラチェット工具において、柄はラチェット機構に接続され、軸部材はラチェット機構の前端部からラチェット機構の中心軸に沿ってラチェット機構の内部に延在し、ラチェット機構に接続される。
さらに、軸は延在部と一体的に又は延在部から分離して設計される。
さらに、ラチェット工具は、照明装置をさらに備え、位置決め装置は、照明器具が取り付けられるキャビティを有する。照明装置は、電気回路基板と、電気回路基板に搭載された電源とを有する。
本発明の目的、特徴、及び利点を十分に理解できるようするために、本発明の概念、詳細な構造、及び期待される技術的効果に関するさらなる説明を、添付の図面を参照して行う。
(実施形態1)
図1−15は本発明の好適な実施形態の関連構造概略図である。
(実施形態2)
本実施形態は実施形態1に類似し、主な違いは軸部材の構造である。
(実施形態3)
図1、図4、及び図10−21は本発明の別の好適な実施形態の構造概略図である。
図16に示すように、本発明のラチェット工具は、軸部材1と、柄2と、ラチェット機構3とを備える。柄2はラチェット機構3に接続される。軸部材1は、ラチェット機構3の前端部からラチェット機構3の中心軸に沿ってラチェット機構3の内部に延在し、ラチェット機構3に接続される。本実施形態では、軸部材1は、ラチェット機構3の前端部からラチェット機構3の中心軸に沿ってラチェット機構3の後端部を貫通し、ラチェット機構3に接続されることが好ましい。
(実施形態4)
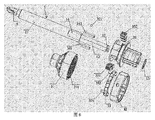
図7、図10−15、及び図22−25は、本発明のさらなる好適な実施形態の構造概略図である。
本実施形態では、実施形態1に基づいて照明装置が加えられている。照明装置の特定の位置を図23に示す。位置決め装置32は、具体的には回転スリーブであり、爪スリーブ31の外側の周囲に配置される環状スリーブである。本実施形態では、位置決め装置32は、照明装置が取り付けられるキャビティ321を有する。図24及び25に示すように、照明装置は、電気回路基板5と、電気回路基板に搭載された電源7とを有する。照明装置が位置決め装置32のキャビティ321内に強固に取り付けられると、透明カバー6が覆い、位置決め装置32に固定される。これにより照明特徴が実現される。
(実施形態5)
本実施形態は実施形態2及び3に類似し、主な違いは追加された照明装置である。照明装置は、実施形態4の照明装置と同じである。
Claims (15)
- 軸部材と、柄と、ラチェット機構とを備えるラチェット工具であって、
前記柄が前記ラチェット機構に接続され、前記軸部材が、前記ラチェット機構の前端部から前記ラチェット機構の中心軸に沿って前記ラチェット機構の内部に延在し、前記ラチェット機構に接続され、
前記ラチェット機構は爪ベース及び爪スリーブを備え、
前記軸部材が軸と延在部とを有し、前記軸が前記延在部と一体的に設計され、前記軸の直径が前記延在部の直径よりも大きく、前記延在部には、固定リングの形状と合致し、前記延在部を前記ラチェット機構に対して軸方向に移動不能にする軸溝が設けられ、前記柄に隣接する側の前記軸の端部は、前記爪スリーブの形状と合致して前記軸と前記爪スリーブとを固定するために用いられる軸端を有し、前記軸端が六角軸端である、ラチェット工具。 - 前記軸部材が、前記ラチェット機構の前記前端部から前記ラチェット機構の前記中心軸に沿って前記ラチェット機構の後端部を貫通し、前記ラチェット機構に接続される、請求項1に記載のラチェット工具。
- 前記軸部材が前記ラチェット機構に取り外し可能に接続される、請求項1に記載のラチェット工具。
- 前記軸部材が、前記柄から離れた側の第1の端部と、前記柄に隣接する側の第2の端部とを有し、前記第1の端部又は前記第2の端部が、前記ラチェット機構の前記前端部から前記ラチェット機構の前記中心軸に沿って前記ラチェット機構の前記内部に延在することができ、前記ラチェット機構に接続される、請求項3に記載のラチェット工具。
- 前記延在部が、前記ラチェット機構の前記内部に延在し、前記ラチェット機構の前記前端部から前記ラチェット機構の前記中心軸に沿って前記ラチェット機構の後端部を貫通し、前記ラチェット機構に接続される、請求項1に記載のラチェット工具。
- 前記爪ベース部は、該爪ベース部上において前記中心軸の両側に沿って2つの部分回転可能な爪、すなわち第1の爪及び第2の爪を有するように対称的に構成され、
前記ラチェット機構はさらに、前記2つの爪の位置状態を制御するための方向切換部材を備え、該方向切換部材は、その上に2つの止めブロック、すなわち第1の止めブロック及び第2の止めブロックを、前記第1の爪及び前記第2の爪をそれぞれ押すために前記2つの爪それぞれの外側に有し、
前記第1及び第2の爪ならびに前記第1及び第2の止めブロックの外側には前記爪スリーブが配置され、該爪スリーブの内側壁が環状に分布する内側爪歯を有し、前記爪スリーブが前記第1の爪及び前記第2の爪の歯と係合する、請求項5に記載のラチェット工具。 - 前記柄に隣接する側の前記軸の端部には、前記爪スリーブの形状と合致して前記軸と前記爪スリーブとを固定するために用いられるキー溝が設けられる、請求項6に記載のラチェット工具。
- 前記爪スリーブの前記内側爪歯の数が60より多い、請求項6に記載のラチェット工具。
- 前記爪スリーブの前記内側爪歯の数が72である、請求項8に記載のラチェット工具。
- 前記第1の爪の歯の数が3より多く、前記第2の爪の歯の数が3より多い、請求項6に記載のラチェット工具。
- 前記第1の爪の歯の数が5であり、前記第2の爪の歯の数が5である、請求項10に記載のラチェット工具。
- 前記方向切換部材が接続される位置決め装置も前記爪スリーブの外側に配置される、請求項6に記載のラチェット工具。
- 前記位置決め装置が、前記爪スリーブの外側の周囲に配置される環状スリーブである、請求項12に記載のラチェット工具。
- 前記ラチェット工具が照明装置をさらに備え、前記位置決め装置は、前記照明装置が取り付けられるキャビティを有する、請求項12に記載のラチェット工具。
- 前記照明装置が、電気回路基板と、該電気回路基板に搭載された電源とを有する、請求項14に記載のラチェット工具。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2014/079842 WO2015188373A1 (zh) | 2014-06-13 | 2014-06-13 | 棘轮工具 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017518894A JP2017518894A (ja) | 2017-07-13 |
| JP2017518894A5 JP2017518894A5 (ja) | 2017-08-24 |
| JP6415707B2 true JP6415707B2 (ja) | 2018-10-31 |
Family
ID=54832747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017517157A Expired - Fee Related JP6415707B2 (ja) | 2014-06-13 | 2014-06-13 | ラチェット工具 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9770813B2 (ja) |
| EP (1) | EP3156178B1 (ja) |
| JP (1) | JP6415707B2 (ja) |
| AU (1) | AU2014397458A1 (ja) |
| CA (1) | CA2951958C (ja) |
| WO (1) | WO2015188373A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10556328B2 (en) * | 2016-09-13 | 2020-02-11 | Leon Robert Palmer | Inline screwdriver with hands-free activated dual-drive self-ratcheting mechanism |
| US10668600B1 (en) | 2019-02-06 | 2020-06-02 | Jingrong Ye | Wrench |
| US11235441B2 (en) | 2019-02-06 | 2022-02-01 | Albertson Enterprises, Llc | Wrench |
| US11161222B2 (en) | 2019-02-06 | 2021-11-02 | Weikai Yang | Wrench |
| US11944502B2 (en) | 2020-04-10 | 2024-04-02 | Medartis Ag | Torque limiting ratcheting handle for medical instrument |
| US12023014B2 (en) | 2020-04-10 | 2024-07-02 | Nextremity Solutions, Inc. | Ratcheting handle for medical instrument |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2720296A (en) * | 1952-02-28 | 1955-10-11 | Amalite Inc | Ratchet tools |
| US5613585A (en) * | 1995-05-02 | 1997-03-25 | Beere Precision Medical Instruments, Inc. | Ratcheting screwdriver |
| US5806381A (en) * | 1997-03-20 | 1998-09-15 | Lin; Ching Chou | Ratchet screw driver assembly |
| US6047801A (en) * | 1997-12-09 | 2000-04-11 | Liao; Yung-Chuan | Ratchet screwdriver |
| US6082226A (en) * | 1999-06-21 | 2000-07-04 | Lin; Jack | Ratchet tool having a ratchet direction positioning device |
| US6224229B1 (en) * | 1999-08-18 | 2001-05-01 | Ching Chou Lin | Rotatable driving tool having light device |
| US6244139B1 (en) | 2000-06-20 | 2001-06-12 | Daniel Huang | Adjustable shifter for controlling the racing of a slideable ratchet shank |
| US6658970B2 (en) * | 2001-12-14 | 2003-12-09 | Hsuan-Sen Shiao | Ratchet screwdriver |
| US20030126958A1 (en) * | 2002-01-09 | 2003-07-10 | Great Neck Saw Manufacturers, Inc. | Ratchet driver |
| US6925912B2 (en) * | 2002-08-23 | 2005-08-09 | Chin-Tan Huang | Operating device for a screwdriver |
| US7137320B2 (en) * | 2003-02-07 | 2006-11-21 | Easco Hand Tools, Inc. | Ratcheting tool driver |
| US6935211B2 (en) * | 2004-01-20 | 2005-08-30 | Su Shia Chen | Ratchet tool having improved driving shank |
| US7028587B1 (en) * | 2005-07-15 | 2006-04-18 | Shu Chi Chiang | Ratchet tool |
| JP5057738B2 (ja) * | 2006-10-02 | 2012-10-24 | 中国電力株式会社 | ドライバ用照明装置 |
| US20080266845A1 (en) * | 2007-04-25 | 2008-10-30 | Unity Opto Technology Co., Ltd. | Auxiliary lighting device |
| US20080278930A1 (en) * | 2007-05-09 | 2008-11-13 | Unity Opto Technology Co., Ltd. | Tool structure with illumination |
| US20080278931A1 (en) * | 2007-05-11 | 2008-11-13 | Unity Opto Technology Co., Ltd. | Tool structure with illumination |
| CN100569456C (zh) | 2007-05-25 | 2009-12-16 | 王宁生 | 棘轮批 |
| US20090044668A1 (en) * | 2007-08-16 | 2009-02-19 | Shu-Sui Lin | Torque device for use in tools |
| US7748296B2 (en) | 2008-07-24 | 2010-07-06 | Gong Fong Enterprise Co., Ltd. | Ratchet screwdriver with an accelerating structure |
| US7993023B2 (en) * | 2009-09-16 | 2011-08-09 | Chien-Kuo Wang | Hand tool with an illuminating device |
| US8210072B2 (en) * | 2010-02-26 | 2012-07-03 | Suter Robert Lee | Roller bearing ratchet tool |
| CN201816012U (zh) | 2010-03-18 | 2011-05-04 | 上海齐迈五金有限公司 | 一种带灯的棘轮螺丝批手柄 |
| CN201677279U (zh) | 2010-05-27 | 2010-12-22 | 杭州巨星科技股份有限公司 | 棘轮螺丝批 |
| CN101890688B (zh) | 2010-05-27 | 2012-12-26 | 杭州巨星科技股份有限公司 | 棘轮螺丝批 |
| US8272298B2 (en) * | 2010-09-08 | 2012-09-25 | Yi-Fu Chen | Steering device for a ratchet screwdriver |
| US8806987B2 (en) * | 2010-09-08 | 2014-08-19 | Yi-Fu Chen | Steering device for a ratchet screwdriver |
| US9028088B2 (en) * | 2010-09-30 | 2015-05-12 | Black & Decker Inc. | Lighted power tool |
| US8544365B2 (en) * | 2011-08-16 | 2013-10-01 | Tzu-Chien Wang | Ratchet tool |
| US9242355B2 (en) * | 2012-04-17 | 2016-01-26 | Black & Decker Inc. | Illuminated power tool |
| DE102012010528B3 (de) * | 2012-05-29 | 2013-07-11 | Jin-Tsai Lai | Ratschenschraubendreher mit Drehrichtungsumschaltung |
| US9427861B2 (en) * | 2013-02-28 | 2016-08-30 | Sicom Industries Ltd. | Bit tool having a bit storage member, light assembly for a bit tool and bit tool having a ratcheting handle assembly |
| CN103192337A (zh) | 2013-03-07 | 2013-07-10 | 绍兴环洲工具制造有限公司 | 伸缩式拆装工具 |
| US10022846B2 (en) * | 2013-05-27 | 2018-07-17 | Hangzhou Great Star Tools Co., Ltd. | Screwdriver |
| US9162348B2 (en) * | 2013-07-01 | 2015-10-20 | Shih-Chi Ho | Steering and positioning structure of a ratchet screwdriver |
| US20150049467A1 (en) * | 2013-08-19 | 2015-02-19 | Mark R Thompson | Hands-Free Device to Illuminate Work Areas |
| US9278435B2 (en) * | 2013-11-06 | 2016-03-08 | Chiung-Chang Tsai | Ratchet screwdriver |
-
2014
- 2014-06-13 JP JP2017517157A patent/JP6415707B2/ja not_active Expired - Fee Related
- 2014-06-13 EP EP14894623.9A patent/EP3156178B1/en active Active
- 2014-06-13 AU AU2014397458A patent/AU2014397458A1/en not_active Abandoned
- 2014-06-13 WO PCT/CN2014/079842 patent/WO2015188373A1/zh active Application Filing
- 2014-06-13 US US14/369,795 patent/US9770813B2/en active Active
- 2014-06-13 CA CA2951958A patent/CA2951958C/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CA2951958A1 (en) | 2015-12-17 |
| EP3156178A1 (en) | 2017-04-19 |
| CA2951958C (en) | 2021-03-30 |
| AU2014397458A1 (en) | 2017-02-02 |
| JP2017518894A (ja) | 2017-07-13 |
| US9770813B2 (en) | 2017-09-26 |
| EP3156178A4 (en) | 2018-01-24 |
| US20170087696A1 (en) | 2017-03-30 |
| WO2015188373A1 (zh) | 2015-12-17 |
| EP3156178B1 (en) | 2020-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6415707B2 (ja) | ラチェット工具 | |
| TWI661909B (zh) | 穿透式電動棘輪扳手及其使用方法 | |
| US7311018B1 (en) | Wrench | |
| US9833883B2 (en) | Bi-directional screwdriver | |
| AU2016101315A4 (en) | Power tool | |
| US7228767B2 (en) | Tool connecting device | |
| US8424421B1 (en) | Jog-shuttle type ratchet wrench | |
| US7069818B1 (en) | Ratchet wrench | |
| US20090217789A1 (en) | Ratchet control structure | |
| KR101475877B1 (ko) | 다방향 드라이버 비트용 어댑터 | |
| TW201834792A (zh) | 用於棘輪齒輪的輪轂 | |
| US20130008755A1 (en) | Clutch Capable of Force Transmission in a Selected One of Two Directions | |
| CN105328622B (zh) | 棘轮工具 | |
| US6550357B1 (en) | Wrench connector | |
| CN104339296B (zh) | 棘轮螺丝批 | |
| EP2727686A1 (en) | Socket wrench | |
| CN204019432U (zh) | 棘轮工具 | |
| US20150101461A1 (en) | Driving tool combination | |
| CA2984687C (en) | Multi-bit tool | |
| US20150047472A1 (en) | Dual-drive, self-ratcheting, mechanism with multiple input ports | |
| US20170080550A1 (en) | One-way ratchet tool set | |
| JP6461274B2 (ja) | 双方向レンチ | |
| JPH10151575A (ja) | 蝶ねじ用レンチ | |
| JPH081532A (ja) | ドライバ | |
| GB2517446A (en) | Multipurpose tool |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170608 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170608 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180904 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6415707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |