JP6415131B2 - 自転車用電子システム - Google Patents
自転車用電子システム Download PDFInfo
- Publication number
- JP6415131B2 JP6415131B2 JP2014130098A JP2014130098A JP6415131B2 JP 6415131 B2 JP6415131 B2 JP 6415131B2 JP 2014130098 A JP2014130098 A JP 2014130098A JP 2014130098 A JP2014130098 A JP 2014130098A JP 6415131 B2 JP6415131 B2 JP 6415131B2
- Authority
- JP
- Japan
- Prior art keywords
- derailleur
- gear shift
- shift device
- model
- identification signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M9/00—Transmissions characterised by use of an endless chain, belt, or the like
- B62M9/04—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio
- B62M9/06—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like
- B62M9/10—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like
- B62M9/12—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like the chain, belt, or the like being laterally shiftable, e.g. using a rear derailleur
- B62M9/121—Rear derailleurs
- B62M9/122—Rear derailleurs electrically or fluid actuated; Controls thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M25/00—Actuators for gearing speed-change mechanisms specially adapted for cycles
- B62M25/08—Actuators for gearing speed-change mechanisms specially adapted for cycles with electrical or fluid transmitting systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M9/00—Transmissions characterised by use of an endless chain, belt, or the like
- B62M9/04—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio
- B62M9/06—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like
- B62M9/10—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like
- B62M9/12—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio using a single chain, belt, or the like involving different-sized wheels, e.g. rear sprocket chain wheels selectively engaged by the chain, belt, or the like the chain, belt, or the like being laterally shiftable, e.g. using a rear derailleur
- B62M9/131—Front derailleurs
- B62M9/132—Front derailleurs electrically or fluid actuated; Controls thereof
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
Description
−前記ディレイラが、ディレイラのモデル識別信号を出力する過程と、
−前記制御電子部が、ディレイラの前記モデル識別信号を受け取る過程と、
−前記制御電子部が、当該ディレイラのモデルに適した指令値のテーブルがあるか否かを確認し、この確認結果が肯定の場合(前記ディレイラのモデルに適した指令値のテーブルがある場合)には、当該テーブルを使用して前記ディレイラを駆動し、この確認結果が否定の場合(前記ディレイラのモデルに適した指令値のテーブルがない場合)には、前記ディレイラの作動を阻止する過程と、
を含むことを特徴とする、自転車用ギアシフト装置の作動方法に関する。
0.1〜0.4ボルトの信号:Set=1
0.5〜0.8ボルトの信号:Set=2
1.0〜2.3ボルトの信号:Set=3
2.5〜2.7ボルトの信号:Set=4
なお、本発明は、実施の態様として以下の内容を含む。
〔態様1〕
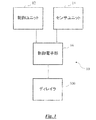
サーボ支援型の自転車用電子式ギアシフト装置(10)であって、
ディレイラ(500)と、
指令値のテーブルに従って前記ディレイラ(500)を駆動する制御電子部(16)と、を備えたギアシフト装置(10)において、
前記ディレイラ(500)が、ディレイラのモデル識別信号を出力し(410,514)、前記制御電子部(16)が、ディレイラの前記モデル識別信号を受け取り、
前記制御電子部(16)は、当該ディレイラのモデルに適した指令値のテーブルがある場合(112)、前記ディレイラ(500)の駆動に前記テーブルを使用し(116)、前記ディレイラのモデルに適した指令値のテーブルがない場合(112)、前記ディレイラ(500)の作動を阻止する(114)ことを特徴とする、ギアシフト装置(10)。
〔態様2〕
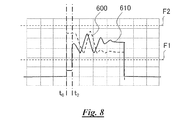
態様1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、前記モデル識別信号、ならびに、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な信号を、共通の出力部(510)で出力する(512)、ギアシフト装置(10)。
〔態様3〕
態様2に記載のギアシフト装置(10)において、前記ディレイラ(500)が、第1の所定の期間(t0〜t2)に前記モデル識別信号を前記共通の出力部(510)において出力する、ギアシフト装置(10)。
〔態様4〕
態様1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、当該自転車用電子式ギアシフト装置(10)の電源が入ったとき;ギアシフト動作の要求のたび;および運転者からの要求のたび;のうちの少なくとも1つの場合に、前記モデル識別信号を出力する、ギアシフト装置(10)。
〔態様5〕
態様4に記載のギアシフト装置(10)において、前記ディレイラ(500)が、当該自転車用電子式ギアシフト装置(10)の電源が入ったとき、および、ギアシフト動作の要求のたびに、前記モデル識別信号を出力する、ギアシフト装置(10)。
〔態様6〕
態様1に記載のギアシフト装置(10)において、前記制御電子部(16)が、ギアシフト動作の要求のたびに、前記ディレイラ(500)が変更されたか否かを前記モデル識別信号に基づいて確認し(212)、変更された場合、前記ディレイラ(500)の作動を阻止する(214)、ギアシフト装置(10)。
〔態様7〕
態様3に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記モデル識別信号を確認する(314〜322)前に、前記第1の所定の期間(t0〜t2)のうちの初めの部分に相当する第2の所定の期間(t0〜t1)待機する(312)、ギアシフト装置(10)。
〔態様8〕
態様3に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号を確認する(326)前に、前記第1の所定の期間(t0〜t2)のうちの終わりの部分とこれに続く期間(t2〜t3)とに相当する第3の所定の期間(t1〜t3)待機する(324)、ギアシフト装置(10)。
〔態様9〕
態様1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、前記モデル識別信号として一定の電圧信号を生成する電圧基準生成器(514)を有する、(好ましくは、前記電圧基準生成器(514)が、バッファおよび抵抗分割器を含む、)ギアシフト装置(10)。
〔態様10〕
態様9に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記一定の電圧信号が複数の所定の数値範囲のうちのいずれの数値範囲に収まるかを確認する(316〜322)ことにより、前記ディレイラ(500)のモデルを判別する、ギアシフト装置(10)。
〔態様11〕
態様2に記載のギアシフト装置(10)において、前記ディレイラ(500)が、さらに、
当該ディレイラ(500)の出力部(510)を、前記モデル識別信号と、当該ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号との間で切り替えるスイッチ(512)を有する、(好ましくは、前記スイッチ(512)がアナログスイッチである、)ギアシフト装置(10)。
〔態様12〕
態様2に記載のギアシフト装置(10)において、前記制御電子部(16)が、さらに、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号が所定の数値範囲(F1〜F2)内であるか否かを確認し(326)、前記範囲内にない場合、前記ディレイラ(500)の作動を阻止する(328)、ギアシフト装置(10)。
〔態様13〕
固有のモデル識別信号を出力する(514)ように構成された、自転車用ディレイラ(500)。
〔態様14〕
自転車用電子式ギアシフト装置(10)の部品であって、
指令値のテーブルに従ってディレイラ(500)を駆動する制御電子部(16)から構成された部品において、
前記制御電子部(16)が、ディレイラのモデル識別信号を受け取り、当該ディレイラのモデルに適した指令値のテーブルを有する場合(112)、前記ディレイラの駆動に前記テーブルを使用し(116)、前記ディレイラのモデルに適した指令値のテーブルを有さない場合(112)、前記ディレイラ(500)の作動を阻止する(114)ことを特徴とする、部品。
〔態様15〕
サーボ支援型の自転車用電子式ギアシフト装置(10)を作動する方法であって、
前記ギアシフト装置(10)が、ディレイラ(500)と、指令値のテーブルに従って前記ディレイラを駆動する制御電子部(16)とを備えた、作動方法において、
−前記ディレイラ(500)が、ディレイラのモデル識別信号を出力する(410,514)過程と、
−前記制御電子部(16)が、ディレイラの前記モデル識別信号を受け取る過程と、
−前記制御電子部(16)が、当該ディレイラのモデルに適した指令値のテーブルがあるか否かを確認する(112)過程であって、前記ディレイラのモデルに適した指令値のテーブルがある場合には、当該テーブルを使用して(116)前記ディレイラを駆動し、前記ディレイラのモデルに適した指令値のテーブルがない場合には、前記ディレイラ(500)の作動を阻止する(114)、過程と、
を含むことを特徴とする、作動方法。
Claims (17)
- サーボ支援型の自転車用電子式ギアシフト装置(10)であって、
ディレイラ(500)と、
指令値のテーブルに従って前記ディレイラ(500)を駆動する制御電子部(16)と、を備えたギアシフト装置(10)において、
前記ディレイラ(500)が、ディレイラのモデル識別信号であって、前記ディレイラのモデルを特定するモデル識別信号を出力し(410,514)、前記制御電子部(16)が、ディレイラの前記モデル識別信号を受け取り、
前記制御電子部(16)は、当該ディレイラのモデルに適した指令値のテーブルがある場合(112)、前記ディレイラ(500)の駆動に前記テーブルを使用し(116)、前記ディレイラのモデルに適した指令値のテーブルがない場合(112)、前記ディレイラ(500)の作動を阻止する(114)ことを特徴とする、ギアシフト装置(10)。 - 請求項1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、前記モデル識別信号、ならびに、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な信号を、共通の出力部(510)で出力する(512)、ギアシフト装置(10)。
- 請求項2に記載のギアシフト装置(10)において、前記ディレイラ(500)が、第1の所定の期間(t0〜t2)に前記モデル識別信号を前記共通の出力部(510)において出力する、ギアシフト装置(10)。
- 請求項1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、当該自転車用電子式ギアシフト装置(10)の電源が入ったとき;ギアシフト動作の要求のたび;および運転者からの要求のたび;のうちの少なくとも1つの場合に、前記モデル識別信号を出力する、ギアシフト装置(10)。
- 請求項4に記載のギアシフト装置(10)において、前記ディレイラ(500)が、当該自転車用電子式ギアシフト装置(10)の電源が入ったとき、および、ギアシフト動作の要求のたびに、前記モデル識別信号を出力する、ギアシフト装置(10)。
- 請求項1に記載のギアシフト装置(10)において、前記制御電子部(16)が、ギアシフト動作の要求のたびに、前記ディレイラ(500)が変更されたか否かを前記モデル識別信号に基づいて確認し(212)、変更された場合、前記ディレイラ(500)の作動を阻止する(214)、ギアシフト装置(10)。
- 請求項3に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記モデル識別信号を確認する(314〜322)前に、前記第1の所定の期間(t0〜t2)のうちの初めの部分に相当する第2の所定の期間(t0〜t1)待機する(312)、ギアシフト装置(10)。
- 請求項3に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号を確認する(326)前に、前記第1の所定の期間(t0〜t2)のうちの終わりの部分とこれに続く期間(t2〜t3)とに相当する第3の所定の期間(t1〜t3)待機する(324)、ギアシフト装置(10)。
- 請求項1に記載のギアシフト装置(10)において、前記ディレイラ(500)が、前記モデル識別信号として一定の電圧信号を生成する電圧基準生成器(514)を有する、ギアシフト装置(10)。
- 請求項9に記載のギアシフト装置(10)において、前記電圧基準生成器(514)が、バッファおよび抵抗分割器を含む、ギアシフト装置(10)。
- 請求項9または10に記載のギアシフト装置(10)において、前記制御電子部(16)が、前記一定の電圧信号が複数の所定の数値範囲のうちのいずれの数値範囲に収まるかを確認する(316〜322)ことにより、前記ディレイラ(500)のモデルを判別する、ギアシフト装置(10)。
- 請求項2に記載のギアシフト装置(10)において、前記ディレイラ(500)が、さらに、
当該ディレイラ(500)の出力部(510)を、前記モデル識別信号と、当該ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号との間で切り替えるスイッチ(512)を有する、ギアシフト装置(10)。 - 請求項12に記載のギアシフト装置(10)において、前記スイッチ(512)がアナログスイッチである、ギアシフト装置(10)。
- 請求項2に記載のギアシフト装置(10)において、前記制御電子部(16)が、さらに、前記ディレイラ(500)の位置、速度、加速度および回転方向の1つまたは任意の組合せを評価するのに実用的な前記信号が所定の数値範囲(F1〜F2)内であるか否かを確認し(326)、前記範囲内にない場合、前記ディレイラ(500)の作動を阻止する(328)、ギアシフト装置(10)。
- 自転車用ディレイラであって、当該ディレイラのモデルを特定する固有のモデル識別信号を出力する(514)ように構成された、自転車用ディレイラ(500)。
- 自転車用電子式ギアシフト装置(10)の部品であって、
指令値のテーブルに従ってディレイラ(500)を駆動する制御電子部(16)から構成された部品において、
前記制御電子部(16)が、ディレイラのモデル識別信号であって、前記ディレイラのモデルを特定するモデル識別信号を受け取り、当該ディレイラのモデルに適した指令値のテーブルを有する場合(112)、前記ディレイラの駆動に前記テーブルを使用し(116)、前記ディレイラのモデルに適した指令値のテーブルを有さない場合(112)、前記ディレイラ(500)の作動を阻止する(114)ことを特徴とする、部品。 - サーボ支援型の自転車用電子式ギアシフト装置(10)を作動する方法であって、
前記ギアシフト装置(10)が、ディレイラ(500)と、指令値のテーブルに従って前記ディレイラを駆動する制御電子部(16)とを備えた、作動方法において、
−前記ディレイラ(500)が、ディレイラのモデル識別信号であって、前記ディレイラのモデルを特定するモデル識別信号を出力する(410,514)過程と、
−前記制御電子部(16)が、ディレイラの前記モデル識別信号を受け取る過程と、
−前記制御電子部(16)が、当該ディレイラのモデルに適した指令値のテーブルがあるか否かを確認する(112)過程であって、前記ディレイラのモデルに適した指令値のテーブルがある場合には、当該テーブルを使用して(116)前記ディレイラを駆動し、前記ディレイラのモデルに適した指令値のテーブルがない場合には、前記ディレイラ(500)の作動を阻止する(114)、過程と、
を含むことを特徴とする、作動方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITMI2013A001064 | 2013-06-26 | ||
| IT001064A ITMI20131064A1 (it) | 2013-06-26 | 2013-06-26 | Sistema elettronico di bicicletta |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015009806A JP2015009806A (ja) | 2015-01-19 |
| JP2015009806A5 JP2015009806A5 (ja) | 2017-07-27 |
| JP6415131B2 true JP6415131B2 (ja) | 2018-10-31 |
Family
ID=49035737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014130098A Active JP6415131B2 (ja) | 2013-06-26 | 2014-06-25 | 自転車用電子システム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9469376B2 (ja) |
| EP (1) | EP2818394B1 (ja) |
| JP (1) | JP6415131B2 (ja) |
| CN (1) | CN104249804B (ja) |
| ES (1) | ES2614704T3 (ja) |
| IT (1) | ITMI20131064A1 (ja) |
| TW (1) | TWI633034B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT201600080244A1 (it) * | 2016-07-29 | 2018-01-29 | Campagnolo Srl | Metodo di controllo di un motore di un deragliatore di un cambio elettronico di bicicletta e componente atto ad eseguire tale metodo |
| IT201700048414A1 (it) * | 2017-05-04 | 2018-11-04 | Campagnolo Srl | Dispositivo manuale di comando per bicicletta, sistema elettronico di bicicletta che lo comprende e metodi di configurazione dello stesso, nonché deragliatore di bicicletta |
| JP7134674B2 (ja) * | 2018-03-30 | 2022-09-12 | 株式会社シマノ | 制御装置、変速関連装置、および、変速システム |
| DE102018207493A1 (de) * | 2018-05-15 | 2019-11-21 | Sram Deutschland Gmbh | Stelleinrichtung für ein Fahrrad und Verfahren zur Steuerung oder Einstellung solcher Stelleinrichtungen |
| US11941922B2 (en) * | 2019-02-05 | 2024-03-26 | Sram, Llc | Component based automated identification of a configurable vehicle |
| TWI712540B (zh) * | 2019-12-02 | 2020-12-11 | 彥豪金屬工業股份有限公司 | 撥鏈位置設定系統及其方法 |
| TWI724812B (zh) * | 2020-03-06 | 2021-04-11 | 彥豪金屬工業股份有限公司 | 自行車踏頻量測裝置及方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5059158A (en) * | 1990-05-08 | 1991-10-22 | E.B.T., Inc. | Electronic transmission control system for a bicycle |
| DE4212320A1 (de) * | 1992-04-13 | 1993-10-14 | Fichtel & Sachs Ag | Elektrische Stellvorrichtung |
| JP3437083B2 (ja) * | 1998-02-23 | 2003-08-18 | 富士通株式会社 | 入出力制御装置およびそのファームウェア更新方法 |
| ITTO20010730A1 (it) * | 2001-07-24 | 2003-01-24 | Campagnolo Srl | Trasduttore di grandezze angolari. |
| EP1426284B1 (en) * | 2002-12-06 | 2007-02-14 | Campagnolo Srl | Electronically servo-assisted bicycle gearshift and related method |
| FR2851222B1 (fr) * | 2003-02-17 | 2006-12-01 | Mavic Sa | Dispositif de commande de changement de vitesse pour un velo et velo equipe d'un tel dispositif |
| US7902967B2 (en) * | 2007-10-23 | 2011-03-08 | Shimano Inc. | Bicycle control system |
| JP5521356B2 (ja) * | 2009-03-04 | 2014-06-11 | 株式会社リコー | カメラシステム |
| EP2551182B1 (en) * | 2011-07-28 | 2015-01-21 | Campagnolo S.r.l. | Method for electronically controlling a bicycle gearshift and electronically servo-assisted bicycle gearshift |
| JP5303615B2 (ja) * | 2011-07-29 | 2013-10-02 | 株式会社シマノ | 自転車用電装システムの診断装置 |
| TWM445509U (zh) * | 2012-02-03 | 2013-01-21 | Shimano Kk | 自行車用電氣零件以及具備自行車用電氣零件之自行車用充電系統 |
| US9008923B2 (en) * | 2013-04-05 | 2015-04-14 | Shimano Inc. | Bicycle derailleur adjusting apparatus |
-
2013
- 2013-06-26 IT IT001064A patent/ITMI20131064A1/it unknown
-
2014
- 2014-06-11 EP EP14172000.3A patent/EP2818394B1/en active Active
- 2014-06-11 ES ES14172000.3T patent/ES2614704T3/es active Active
- 2014-06-25 TW TW103121946A patent/TWI633034B/zh active
- 2014-06-25 JP JP2014130098A patent/JP6415131B2/ja active Active
- 2014-06-26 CN CN201410295438.7A patent/CN104249804B/zh active Active
- 2014-06-26 US US14/315,785 patent/US9469376B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN104249804B (zh) | 2018-11-09 |
| JP2015009806A (ja) | 2015-01-19 |
| US9469376B2 (en) | 2016-10-18 |
| US20150006043A1 (en) | 2015-01-01 |
| TW201505901A (zh) | 2015-02-16 |
| ES2614704T3 (es) | 2017-06-01 |
| TWI633034B (zh) | 2018-08-21 |
| EP2818394A8 (en) | 2015-03-11 |
| CN104249804A (zh) | 2014-12-31 |
| EP2818394B1 (en) | 2016-11-09 |
| EP2818394A1 (en) | 2014-12-31 |
| ITMI20131064A1 (it) | 2014-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6415131B2 (ja) | 自転車用電子システム | |
| JP4609418B2 (ja) | シフト切換機構の制御装置および制御方法 | |
| US20160052594A1 (en) | Pedal-driven vehicle, and method for operating the pedal-driven vehicle | |
| US10450031B2 (en) | Gearshift for a bicycle and bicycle with such a gearshift | |
| JP4978308B2 (ja) | シフト切換装置 | |
| JP6413384B2 (ja) | ステアリング装置 | |
| ITTO20000292A1 (it) | Procedimento per il controllo del cambio di velocita' in un ciclo, relativo sistema e relativi componenti. | |
| KR20170115588A (ko) | 자동차의 드라이브 바이 와이어 시스템의 모니터링 방법 | |
| JP6789461B2 (ja) | シフトレンジ制御装置 | |
| TW201446585A (zh) | 自行車電子系統(一) | |
| JP6705428B2 (ja) | シフトレンジ制御装置 | |
| JP2009090854A (ja) | 駐車ブレーキ制御装置 | |
| JP2015009806A5 (ja) | ||
| JP2023021332A (ja) | 自転車の手動制御装置、手動制御装置を備える自転車電子システム、自転車電子システムのコンフィギュレーション方法、および自転車のディレイラ | |
| EP1486398A4 (en) | STEERING SYSTEM CONTROL DEVICE WITH ELECTRICAL ASSISTANCE | |
| KR20160132210A (ko) | 변속단 자동제어 방법 및 시스템 | |
| CN110446841B (zh) | 加速器开度检测装置 | |
| CN108860307A (zh) | 转向操纵控制装置 | |
| KR101296086B1 (ko) | 전자식 주차 브레이크 시스템 및 그 제어 방법 | |
| JP2007032819A (ja) | 車両制御システム | |
| JP2010160104A (ja) | シフト位置検出装置 | |
| US20070112473A1 (en) | Operation input device | |
| ITVR20130273A1 (it) | Trasmissione per mezzi di trasporto con rilevamento della coppia | |
| US20170067555A1 (en) | Gear-Changing Apparatus for Actuating a Manual Gearbox of a Motorcycle for Carrying Out a Gear Change with the Clutch Engaged | |
| US11015703B2 (en) | Gear-changing apparatus for actuating a manual gearbox of a motorcycle for carrying out a gear change with the clutch engaged |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170616 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170616 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180320 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180821 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6415131 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |