JP6408317B2 - 原料ヤードの原料山形状の計測方法および計測装置 - Google Patents
原料ヤードの原料山形状の計測方法および計測装置 Download PDFInfo
- Publication number
- JP6408317B2 JP6408317B2 JP2014189735A JP2014189735A JP6408317B2 JP 6408317 B2 JP6408317 B2 JP 6408317B2 JP 2014189735 A JP2014189735 A JP 2014189735A JP 2014189735 A JP2014189735 A JP 2014189735A JP 6408317 B2 JP6408317 B2 JP 6408317B2
- Authority
- JP
- Japan
- Prior art keywords
- raw material
- yard
- material yard
- aerial
- measuring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
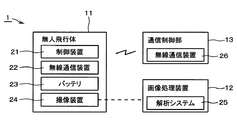
11 無人飛行体
12 画像処理装置
13 通信制御部
21 制御装置
22 無線通信装置
23 バッテリ
24 撮像装置
25 解析システム
26 無線通信装置
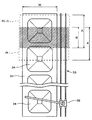
31 原料ヤード
32 ヤード機械
33 レール
34 原料山
Claims (4)
- 無人飛行体に、前記無人飛行体を遠隔操縦するための制御装置、無線通信装置、バッテリ、および撮像装置を搭載し、
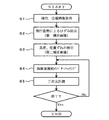
前記無人飛行体を、原料ヤードの上方において前記原料ヤードの長さ方向に移動させながら、前記撮像装置により前記原料ヤードを連続的に空撮し、
設置位置と寸法が把握できるものを全ての空撮画像に写し込んで基準となる寸法とし、その基準に基づいて、連続して撮影した空撮画像同士の重複部分の画像を利用してステレオ視法により、前記原料ヤードの原料山形状を計測することを特徴とする、原料ヤードの原料山形状の計測方法。 - 各空撮画像には、前記設置位置と寸法が把握できるものとして、前記原料ヤードの全幅を写し込み、さらに、前記原料ヤードの長さ方向に沿って設置されたヤード機械用レール、コンベア、コンベア架台のうち少なくともいずれかを写し込むことを特徴とする、請求項1に記載の原料ヤードの原料山形状の計測方法。
- 前記空撮画像は、直前に撮影した空撮画像に対して、前記原料ヤードの長さ方向において50%以上を重複して撮影することを特徴とする、請求項1または2に記載の原料ヤードの原料山形状の計測方法。
- 原料ヤードの原料山形状を計測する計測装置であって、
制御装置、無線通信装置、バッテリ、および撮像装置を搭載し、遠隔操作で前記原料ヤードの上方を前記原料ヤードの長さ方向に移動可能な無人飛行体と、
前記撮像装置により空撮した前記原料ヤードの空撮画像に写し込んだ設置位置と寸法が把握できるものを基準となる寸法とし、その基準に基づいて、複数の空撮画像の重複部を利用してステレオ視法により、前記原料ヤードの原料山形状を解析する解析システムを備えた画像処理装置と、を備えていることを特徴とする、原料ヤードの原料山形状の計測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014189735A JP6408317B2 (ja) | 2014-09-18 | 2014-09-18 | 原料ヤードの原料山形状の計測方法および計測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014189735A JP6408317B2 (ja) | 2014-09-18 | 2014-09-18 | 原料ヤードの原料山形状の計測方法および計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016061674A JP2016061674A (ja) | 2016-04-25 |
| JP6408317B2 true JP6408317B2 (ja) | 2018-10-17 |
Family
ID=55797515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014189735A Expired - Fee Related JP6408317B2 (ja) | 2014-09-18 | 2014-09-18 | 原料ヤードの原料山形状の計測方法および計測装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6408317B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6791041B2 (ja) * | 2017-07-11 | 2020-11-25 | Jfeスチール株式会社 | 原料山計測方法および原料山計測システム |
| CN113167569B (zh) * | 2018-11-21 | 2022-10-11 | 日本电气通信系统株式会社 | 体积测量装置、系统、方法和程序 |
| JP7137509B2 (ja) * | 2019-03-28 | 2022-09-14 | 五洋建設株式会社 | 船舶の積載物の数量検収システム |
| EP3836054B1 (de) | 2019-12-13 | 2022-05-11 | SMS Group GmbH | Verwendung einer ferngesteuerten drohne |
| CN113155098B (zh) | 2021-04-20 | 2022-08-09 | 中国铁路设计集团有限公司 | 基于无人机多视角影像的既有铁路轨道线高精度三维重建方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3922646B2 (ja) * | 2004-07-01 | 2007-05-30 | 国際航業株式会社 | ステレオ写真画像の検索方法及び表示方法並びに管理システム |
| JP2008105591A (ja) * | 2006-10-26 | 2008-05-08 | Hiroboo Kk | 自律制御無人飛行体の飛行管理方法 |
| US8577518B2 (en) * | 2009-05-27 | 2013-11-05 | American Aerospace Advisors, Inc. | Airborne right of way autonomous imager |
| JP5847409B2 (ja) * | 2011-03-17 | 2016-01-20 | 新日鐵住金株式会社 | 原料ヤード管理システム、原料ヤード管理方法、及びコンピュータプログラム |
| JP5947634B2 (ja) * | 2012-06-25 | 2016-07-06 | 株式会社トプコン | 航空写真撮像方法及び航空写真撮像システム |
| JP6293593B2 (ja) * | 2014-07-03 | 2018-03-14 | 株式会社日立ソリューションズ | 体積算出装置、体積算出方法、および体積算出プログラム |
-
2014
- 2014-09-18 JP JP2014189735A patent/JP6408317B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016061674A (ja) | 2016-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6408317B2 (ja) | 原料ヤードの原料山形状の計測方法および計測装置 | |
| JP4300118B2 (ja) | 車両へのコンテナの自動積み降ろし用光学装置 | |
| CN112722873B (zh) | 堆取料机自动控制系统 | |
| US11620613B2 (en) | Drone-based inventory management methods and systems | |
| US9637887B2 (en) | Reclaimer 3D volume rate controller | |
| CN100406371C (zh) | 用于货柜识别的系统与方法 | |
| US11113543B2 (en) | Facility inspection system and facility inspection method | |
| JP6809494B2 (ja) | ベルトコンベアの管理方法および管理システム | |
| CN206420439U (zh) | 基于机器视觉的接触网几何参数检测装置 | |
| CN102092405A (zh) | 一种轨道曲线参数测量方法及系统装置 | |
| CN106226157A (zh) | 混凝土构件裂缝自动检测装置及方法 | |
| JP6791041B2 (ja) | 原料山計測方法および原料山計測システム | |
| WO2015135015A1 (en) | Train wagon 3d profiler | |
| KR101916248B1 (ko) | 조선소 내 데이터 수집 시스템 | |
| CN111606205B (zh) | 包括参考标记的集装箱起重机 | |
| JP6895788B2 (ja) | 原料ヤードの原料山形状の計測方法および計測装置 | |
| KR102504743B1 (ko) | 시설물의 모델링을 기반으로 하는 점검 드론의 위치 보정장치 및 보정방법 | |
| FI128194B (fi) | Liikkuva nostinlaitteisto, järjestely ja menetelmä | |
| CN113310722A (zh) | 一种对粉料进行网格分区自动随机取样的设备和方法 | |
| JP4700567B2 (ja) | 鋼材の管理方法と管理システム | |
| KR101555105B1 (ko) | 파일 재고량을 측정하기 위한 무인항공 시스템 및 그 이용 방법 | |
| KR101837906B1 (ko) | 스태커 및 리클라이머 장비의 자동 운전을 통한 야드 관리 시스템 | |
| CN113086847B (zh) | 龙门吊设备的状态信息确定方法及装置 | |
| JPS6058134B2 (ja) | 原料ヤ−ドの管理方法 | |
| JP6579142B2 (ja) | コイルヤードの置場管理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180904 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6408317 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |