JP6361769B1 - 位置予測装置及び位置検出装置 - Google Patents
位置予測装置及び位置検出装置 Download PDFInfo
- Publication number
- JP6361769B1 JP6361769B1 JP2017062065A JP2017062065A JP6361769B1 JP 6361769 B1 JP6361769 B1 JP 6361769B1 JP 2017062065 A JP2017062065 A JP 2017062065A JP 2017062065 A JP2017062065 A JP 2017062065A JP 6361769 B1 JP6361769 B1 JP 6361769B1
- Authority
- JP
- Japan
- Prior art keywords
- unit
- rotation angle
- time
- estimated
- operating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/16—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying resistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/487—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by rotating magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/24495—Error correction using previous values
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
【解決手段】連続的に作動する動作体の所定時刻における位置を予測する位置予測装置は、所定時刻よりも過去の位置推定時刻における動作体の推定位置状態を求める推定部と、推定部により推定された動作体の推定位置状態に基づき、動作体の所定時刻における位置を予測する位置予測部とを備える。
【選択図】図1
Description
θ=atan(S1/S2)
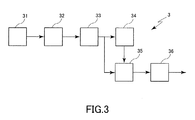
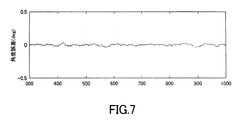
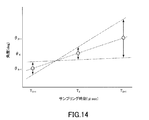
図3及び図4に示す構成を有する磁気検出装置3における、予測部36による現在サンプリング時刻Tnにおける回転角度θPnの予測に関し、MATLABを用いてシミュレーションを行い、回転角度θPnの予測値に含まれるノイズを求めた。かかるシミュレーションにおいて、磁石2が10000deg/secで等速回転運動し、検出部31によるサンプリング周期が50μsecであり、演算処理部33により算出される回転角度θに含まれるノイズが±0.1degであり(図6参照)、3サンプリング時刻分(150μsec)の群遅延が生じるものとした。また、シミュレート部34は、4サンプリング時刻前Tn-4における回転角度θEn-4、角速度ωEn-4及び角加速度En-4を用いた外挿処理により3サンプリング時刻前Tn-3の回転角度θSn-3をシミュレートし、推定部35は、3サンプリング時刻前Tn-3の回転角度θn-3を回転角度θSn-3に反映させることで回転角度θEn-3、角速度ωEn-3及び角加速度αEn-3を推定し、それらの推定値θEn-3、ωEn-3、αEn-3を用いた線形外挿処理によって、予測部36が回転角度θPnを予測するものとした。シミュレーション結果を図7に示す。
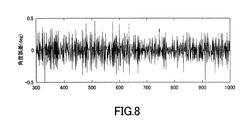
演算処理部33により算出された3サンプリング時刻Tn-3〜Tn-5における回転角度θn-3〜θn-5を用いて線形外挿処理を行うことで現在サンプリング時刻Tnにおける回転角度θPnの予測をすることとした以外は、実施例1と同様にして回転角度θPnの予測値に含まれるノイズを求めた。シミュレーション結果を図8に示す。
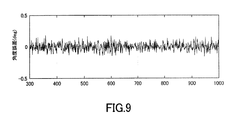
4サンプリング時刻Tn-3〜Tn-6における回転角度θn-3〜θn-6をそれぞれ1回微分した角速度ωn-3〜ωn-6を用いた移動平均フィルタ処理を行うことで現在サンプリング時刻Tnにおける回転角度θPnを予測することとした以外は、実施例1と同様にして回転角度θPnの予測値に含まれるノイズを求めた。シミュレーション結果を図9に示す。
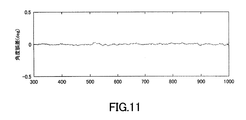
磁石2が2×108deg/sec2で等加速回転運動しているものとし、演算処理部33により算出される回転角度θに含まれるノイズが、図10に示すように速度が大きくなるに従い増大することとした以外は、実施例1と同様にして回転角度θPnの予測値に含まれるノイズを求めた。結果を図11に示す。
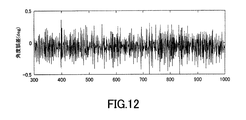
演算処理部33により算出された3サンプリング時刻Tn-3〜Tn-5における回転角度θn-3〜θn-5を用いて線形外挿処理を行うことで現在サンプリング時刻Tnにおける回転角度θPnの予測をすることとした以外は、実施例2と同様にして回転角度θPnの予測値に含まれるノイズを求めた。シミュレーション結果を図12に示す。
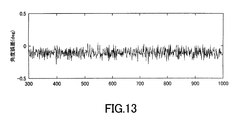
4サンプリング時刻Tn-3〜Tn-6における回転角度θn-3〜θn-6をそれぞれ2回微分した角加速度αn-3〜αn-6を用いた移動平均フィルタ処理を行うことで現在サンプリング時刻Tnにおける回転角度θPnを予測することとした以外は、実施例2と同様にして回転角度θPnの予測値に含まれるノイズを求めた。シミュレーション結果を図13に示す。
2…磁石(磁界発生部)
3…磁気検出装置
31…検出部
33…演算処理部
34…シミュレート部
35…推定部
36…予測部
Claims (5)
- 連続的に作動する動作体の所定時刻における位置を予測する装置であって、
前記所定時刻よりも過去の第1時刻における前記動作体の推定位置状態を求める推定部と、
前記推定部により推定された前記動作体の推定位置状態に基づき、前記動作体の前記所定時刻における位置を予測する位置予測部と、
前記動作体に設けられている磁界発生部の外部磁界を検出することで出力される前記動作体の位置に関する信号に基づき、前記動作体の位置状態を算出する演算処理部と、
前記推定部により推定された、前記第1時刻よりも過去の第2時刻における前記動作体の推定位置状態に基づいて、前記動作体の前記第1時刻におけるシミュレート位置状態を求めるシミュレート部と
を備え、
前記推定部は、前記シミュレート部により求められた前記第1時刻における前記動作体の前記シミュレート位置状態と、前記演算処理部により算出された前記第1時刻における前記動作体の前記位置状態とに基づいて、前記動作体の前記第1時刻における前記推定位置状態を求めることを特徴とする位置予測装置。 - 前記第1時刻における前記動作体の前記位置状態は、前記演算処理部により算出される前記動作体の前記位置状態のうちの最新時刻における前記位置状態であることを特徴とする請求項1に記載の位置予測装置。
- 前記動作体が、所定の回転軸を中心として回転する回転動作体であり、
前記推定部は、前記動作体の前記位置推定時刻における回転角度、角速度及び角加速度の推定値を前記推定位置状態として求めることを特徴とする請求項1又は2に記載の位置予測装置。 - 請求項1〜3のいずれかに記載の位置予測装置と、
前記動作体に設けられてなる前記磁界発生部に対向して配置され、前記動作体の位置を検出可能な検出部と
を備えることを特徴とする位置検出装置。 - 前記検出部は、磁気抵抗効果素子を含むことを特徴とする請求項4に記載の位置検出装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062065A JP6361769B1 (ja) | 2017-03-28 | 2017-03-28 | 位置予測装置及び位置検出装置 |
| US15/805,289 US10352727B2 (en) | 2017-03-28 | 2017-11-07 | Position forecasting apparatus and position detection apparatus |
| DE102017126610.0A DE102017126610A1 (de) | 2017-03-28 | 2017-11-13 | Vorrichtung zur Positionsprognose und Vorrichtung zur Positionserfassung |
| CN201711297303.4A CN108662969B (zh) | 2017-03-28 | 2017-12-08 | 位置预测装置及位置检测装置 |
| US16/426,095 US10697798B2 (en) | 2017-03-28 | 2019-05-30 | Position forecasting apparatus and position detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062065A JP6361769B1 (ja) | 2017-03-28 | 2017-03-28 | 位置予測装置及び位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6361769B1 true JP6361769B1 (ja) | 2018-07-25 |
| JP2018165619A JP2018165619A (ja) | 2018-10-25 |
Family
ID=62976532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017062065A Active JP6361769B1 (ja) | 2017-03-28 | 2017-03-28 | 位置予測装置及び位置検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10352727B2 (ja) |
| JP (1) | JP6361769B1 (ja) |
| CN (1) | CN108662969B (ja) |
| DE (1) | DE102017126610A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6939754B2 (ja) * | 2018-11-22 | 2021-09-22 | Tdk株式会社 | 角度センサおよび角度センサシステム |
| JP6908066B2 (ja) * | 2019-03-18 | 2021-07-21 | Tdk株式会社 | 信号処理回路、位置検出装置および磁気センサシステム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008116300A (ja) * | 2006-11-02 | 2008-05-22 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
| JP2010173373A (ja) * | 2009-01-27 | 2010-08-12 | Mitsubishi Electric Corp | 人工衛星の解析運用支援プログラムおよび情報処理装置 |
| EP2916107A1 (de) * | 2014-03-05 | 2015-09-09 | Siemens Aktiengesellschaft | Extrapolation der Feinlage bei einem Lagegeber mit phasenmoduliertem Rohsignal |
| JP2016186475A (ja) * | 2015-03-27 | 2016-10-27 | Tdk株式会社 | 位置予測装置及び位置検出装置 |
| WO2016204205A1 (ja) * | 2015-06-17 | 2016-12-22 | 旭化成エレクトロニクス株式会社 | 検出装置、回転角度検出装置、検出方法、およびプログラム |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0349588A (ja) * | 1989-07-14 | 1991-03-04 | Omron Corp | 離散時間型acモータ制御装置 |
| US5187664A (en) * | 1990-11-27 | 1993-02-16 | Eaton-Kenway, Inc. | Proportional position-sensing system for an automatic guided vehicle |
| JP3367260B2 (ja) | 1995-03-24 | 2003-01-14 | 三菱電機株式会社 | エンコーダ装置及びサーボモーター制御装置 |
| GB2414300B (en) | 2004-02-12 | 2006-09-20 | Weston Aerospace | Signal processing method and apparatus |
| DE102004046803B4 (de) | 2004-09-27 | 2011-08-18 | Infineon Technologies AG, 81669 | Verfahren zur Bestimmung der Winkelposition eines rotierenden Objekts und Drehgeber |
| JP4689435B2 (ja) * | 2004-12-16 | 2011-05-25 | アルプス電気株式会社 | 角度検出センサ |
| KR20070118310A (ko) * | 2005-05-11 | 2007-12-14 | 도요다 지도샤 가부시끼가이샤 | 각 위치 검출기 및 이를 구비한 회전 전기 장치 구동 유닛 |
| US7456599B2 (en) | 2005-05-31 | 2008-11-25 | Rockwell Automation Technologies, Inc. | Position feedback device with prediction |
| JP4925789B2 (ja) | 2006-11-02 | 2012-05-09 | Ntn株式会社 | 回転検出装置および回転検出装置付き軸受 |
| WO2009066574A1 (ja) * | 2007-11-20 | 2009-05-28 | Sumida Corporation | 回転角度検出用センサ |
| US8729889B2 (en) * | 2008-01-18 | 2014-05-20 | C-Sigma S.R.L. | Method and apparatus for magnetic contactless measurement of angular and linear positions |
| JP5387583B2 (ja) * | 2009-03-30 | 2014-01-15 | 日立金属株式会社 | 回転角度検出装置 |
| US8096271B2 (en) * | 2009-06-01 | 2012-01-17 | GM Global Technology Operations LLC | System and method for determining a camshaft position in a variable valve timing engine |
| JP5096442B2 (ja) * | 2009-11-17 | 2012-12-12 | 株式会社日立製作所 | 回転角計測装置,モータシステム及び電動パワーステアリング・システム |
| WO2011134955A2 (de) * | 2010-04-26 | 2011-11-03 | Ina Drives, & Mechatronics Gmbh & Co. Ohg | Wälzlageranordnung mit einem winkelsensor |
| WO2012026279A1 (ja) * | 2010-08-25 | 2012-03-01 | 三菱電機株式会社 | 軌跡制御装置 |
| US8754640B2 (en) * | 2012-06-18 | 2014-06-17 | Allegro Microsystems, Llc | Magnetic field sensors and related techniques that can provide self-test information in a formatted output signal |
| JP5979246B2 (ja) * | 2012-12-11 | 2016-08-24 | トヨタ自動車株式会社 | 車両の状態検出装置 |
| US9042716B2 (en) * | 2013-08-15 | 2015-05-26 | Allegro Microsystems, Llc | Method and apparatus for determining linear position using multiple magnetic field sensors |
| KR101885009B1 (ko) * | 2013-08-26 | 2018-08-02 | 미쓰비시덴키 가부시키가이샤 | 위치 검출기의 각도 오차 보정 장치 및 각도 오차 보정 방법 |
| JP6210284B2 (ja) * | 2013-09-18 | 2017-10-11 | 株式会社ジェイテクト | 回転角検出装置 |
| JP6157300B2 (ja) | 2013-09-30 | 2017-07-05 | 太平洋セメント株式会社 | セメントキルン排ガスの処理方法 |
| JP6191840B2 (ja) * | 2015-07-31 | 2017-09-06 | Tdk株式会社 | 角度センサの補正装置および補正方法ならびに角度センサ |
-
2017
- 2017-03-28 JP JP2017062065A patent/JP6361769B1/ja active Active
- 2017-11-07 US US15/805,289 patent/US10352727B2/en active Active
- 2017-11-13 DE DE102017126610.0A patent/DE102017126610A1/de active Pending
- 2017-12-08 CN CN201711297303.4A patent/CN108662969B/zh active Active
-
2019
- 2019-05-30 US US16/426,095 patent/US10697798B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008116300A (ja) * | 2006-11-02 | 2008-05-22 | Ntn Corp | 回転検出装置および回転検出装置付き軸受 |
| JP2010173373A (ja) * | 2009-01-27 | 2010-08-12 | Mitsubishi Electric Corp | 人工衛星の解析運用支援プログラムおよび情報処理装置 |
| EP2916107A1 (de) * | 2014-03-05 | 2015-09-09 | Siemens Aktiengesellschaft | Extrapolation der Feinlage bei einem Lagegeber mit phasenmoduliertem Rohsignal |
| JP2016186475A (ja) * | 2015-03-27 | 2016-10-27 | Tdk株式会社 | 位置予測装置及び位置検出装置 |
| WO2016204205A1 (ja) * | 2015-06-17 | 2016-12-22 | 旭化成エレクトロニクス株式会社 | 検出装置、回転角度検出装置、検出方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US10352727B2 (en) | 2019-07-16 |
| US20190277662A1 (en) | 2019-09-12 |
| US20180283903A1 (en) | 2018-10-04 |
| CN108662969A (zh) | 2018-10-16 |
| DE102017126610A1 (de) | 2018-10-04 |
| CN108662969B (zh) | 2020-06-23 |
| JP2018165619A (ja) | 2018-10-25 |
| US10697798B2 (en) | 2020-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6197839B2 (ja) | 回転検出装置 | |
| WO2009126200A2 (en) | Gear tooth sensor with single magnetoresistive bridge | |
| JP6194914B2 (ja) | 位置予測装置及び位置検出装置 | |
| JP7153012B2 (ja) | 回転部材の少なくとも1つの回転パラメータを決定するための決定システム | |
| JP2017138143A (ja) | 変位検出装置および角速度検出装置 | |
| CN106066461B (zh) | 磁阻装置 | |
| JP6939754B2 (ja) | 角度センサおよび角度センサシステム | |
| JP6361769B1 (ja) | 位置予測装置及び位置検出装置 | |
| US20080218159A1 (en) | Sensor System For Determining a Position or a Rotational Speed of an Object | |
| CN107229020A (zh) | 磁性传感器 | |
| JP2018115929A (ja) | 電流センサの信号補正方法、及び電流センサ | |
| CN114646335A (zh) | 用于位置检测的装置和方法 | |
| US11313666B2 (en) | Angle sensor and angle sensor system | |
| JP6947194B2 (ja) | 信号処理回路および磁気センサシステム | |
| CN110749276A (zh) | 角度传感器的修正装置及角度传感器 | |
| JP7242352B2 (ja) | 回転部材の少なくとも1つの回転パラメータを決定するためのシステム | |
| CN110749277B (zh) | 角度传感器的修正装置及角度传感器 | |
| JP7156249B2 (ja) | 位置検出装置 | |
| US9612135B2 (en) | Device for determining motion parameters | |
| JP2020153980A (ja) | 回転部材の少なくとも1つの回転パラメータを決定するシステム | |
| JP4917522B2 (ja) | ポジションセンサ | |
| US11639860B2 (en) | Absolute position detection device and detection method of rotating body using magnetic material | |
| JP2009041949A (ja) | 磁気式加速度センサ | |
| JP2010223595A (ja) | 位置検出装置 | |
| JP2020153981A (ja) | 回転部材の少なくとも1つの回転パラメータを決定するシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6361769 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20200305 |