JP6355014B2 - 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム - Google Patents
光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム Download PDFInfo
- Publication number
- JP6355014B2 JP6355014B2 JP2014052024A JP2014052024A JP6355014B2 JP 6355014 B2 JP6355014 B2 JP 6355014B2 JP 2014052024 A JP2014052024 A JP 2014052024A JP 2014052024 A JP2014052024 A JP 2014052024A JP 6355014 B2 JP6355014 B2 JP 6355014B2
- Authority
- JP
- Japan
- Prior art keywords
- operation mode
- coordinate value
- unit
- position detection
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 501
- 230000003287 optical effect Effects 0.000 title claims description 163
- 238000005286 illumination Methods 0.000 claims description 130
- 230000014509 gene expression Effects 0.000 claims description 20
- 238000005259 measurement Methods 0.000 claims description 15
- 238000000034 method Methods 0.000 claims description 11
- 230000008569 process Effects 0.000 claims description 9
- 238000010586 diagram Methods 0.000 description 24
- 239000003990 capacitor Substances 0.000 description 15
- 230000001678 irradiating effect Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 7
- 238000004904 shortening Methods 0.000 description 5
- 239000000758 substrate Substances 0.000 description 4
- 230000003321 amplification Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
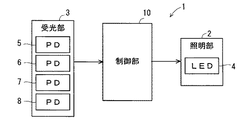
まず、後述する第一〜第三実施形態に共通する光学的位置検出システム1の構成について説明する。図1は、本実施の形態に係る光学的位置検出システム1の概略的な構成を示す図である。本実施の形態に係る光学的位置検出システム1は、例えば人の手や指といった検知対象物60の位置を光学的に検出する。図1に示されるように、光学的位置検出システム1は、略直方体の形状を成している。光学的位置検出システム1には、光を透過させる窓が設けられており、その窓の内側に、照明部2と受光部3とを備えている。光学的位置検出システム1の最長の一辺の長さは、例えば10mm程度の長さであるが、図1では、便宜上、実際よりも大きいサイズで光学的位置検出システム1が示されている。なお、図1に示される光学的位置検出システム1、照明部2および受光部3の形状は一例であり、図1に示される形状に限られない。
図3は、光学的位置検出システム1の電気的構成を示すブロック図である。図3に示されるように、光学的位置検出システム1には、照明部2と、受光部3と、制御部10とが設けられている。
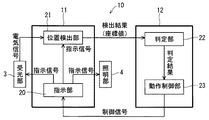
図5は、制御部10の構成を示すブロック図である。図5に示されるように、制御部10は、第1制御部11と、第1制御部11を制御する第2制御部12とを有している。第1制御部11は、指示部20と、位置検出部21とを有している。第2制御部12は、判定部22と、動作制御部23とを有している。第1制御部11は、主に、第2制御部12からの制御信号に基づいて、検知対象物60の位置を検出する。つまり、第1制御部11は、検知対象物60の位置を検出する位置検出装置として機能する。一方、第2制御部12は、主に、第1制御部11で検出された検知対象物60の検知結果に基づいて、光学的位置検出システム1の動作を制御する。つまり、第2制御部12は、光学的位置検出システム1の動作を制御する制御装置として機能する。本実施の形態では、例えば、第1制御部11及び第2制御部12のそれぞれはLSI(Large Scale Integration)で構成される。

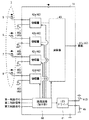
ここでは、第1制御部11(位置検出装置)の構成について説明する。図7は、主に第1制御部11の構成の一例を示す図である。図7に示されるように、第1制御部11は、LEDドライバ41と、増幅器42a〜42dと、演算器(演算回路)43と、論理回路44とを備えている。増幅器42a〜42dにはコンデンサ46a〜46dがそれぞれ接続されている。以後、増幅器42a〜42dを特に区別する必要がないときには、それぞれを「増幅器42」と呼ぶ。また、コンデンサ46a〜46dを特に区別する必要がないときには、それぞれを「コンデンサ46」と呼ぶ。演算器43には、出力端子47a〜47cが接続されている。以後、出力端子47a〜47cを特に区別する必要がないときには、それぞれを「出力端子47」と呼ぶ。
ここでは、第2制御部12(制御装置)の構成について説明する。第2制御部12は、例えば、LSIの一種であるマイクロコントローラ(マイコン)で構成される。図9は、第2制御部12の構成を示す図である。図9に示されるように、第2制御部12は、CPU(Central Processing Unit)12aおよび記憶部12b等を備えており、CPU12aが記憶部12bに記憶されている制御プログラム12cを実行することで、第2制御部12に係る各種機能(判定部22及び動作制御部23)が実現される。記憶部12bは、ROM(Read Only Memory)及びRAM(Random Access Memory)等の、CPU12aが読み取り可能な非一時的な記録媒体で構成されている。記憶部12bは、ROM及びRAM以外の、コンピュータが読み取り可能な非一時的な記録媒体を備えていても良い。
<動作制御部が送出する制御信号について>
図10は、動作制御部23が送出する制御信号の一例を示す図である。図10には、動作制御部23が送出する制御信号(第一制御信号、第二制御信号及び第三制御信号)と、増幅器42、演算器43(x座標値演算器31、y座標値演算器32およびz座標値演算器33)及びLEDドライバ41の状態との関係が6種類示されている。第一制御信号、第二制御信号および第三制御信号のそれぞれは2値信号であって、highレベル及びlowレベルのどちらか一方の信号レベルを示す。そして、論理回路44(指示部20)は、動作制御部23から出力された第一制御信号、第二制御信号及び第三制御信号が示す信号レベルの組み合わせに応じた指示信号を、増幅器42、演算器43及びLEDドライバ41に送出する。
ここでは、動作制御部23による光学的位置検出システム1の制御例について説明する。図11は、光学的位置検出システム1のタイミングチャートの一例を示す図である。図11には、動作制御部23から送出される制御信号と、LED4及び演算器43の出力(光量及び各座標値)とが示されている。
第二実施形態では、光学的位置検出システム1の動作モードが第2動作モードに設定されている場合に、LED4(照明部2)の照射時間を短くすることで、光学的位置検出システム1を低消費電力化する。なお、第二実施形態における光学的位置検出システム1の残余の構成は、第一実施形態と同様である。
第三実施形態では、光学的位置検出システム1の動作モードが第1動作モードに設定されている場合に、演算器43(x座標値演算器31、y座標値演算器32及びz座標値演算器33)が、LED4(照明部2)が光50を照射する周期より長い周期で、x座標値、y座標値及びz座標値の少なくとも一つを求めることで、光学的位置検出システム1を低消費電力化している。
<測距システムについて>
上述した第1実施形態及び第2実施形態は、光学的位置検出システム1だけでなく、測距システムにも適用することができる。測距システムは、照明部2、受光部3及び制御部10を備えており、当該測距システムと検知対象物60との距離を検出する。測距システムは、まず、照明部2から光50を照射し、検知対象物60で反射した光(反射光51)を受光部3で受光する。そして、反射光51を受光部3で受光することで得られた電気信号に基づいて、制御部10が測距システムと検知対象物60との距離を検出する。測距システムは、当該測距システムと検知対象物60との距離を検出する点で、検知対象物60の位置(座標値)を検出する光学的位置検出システム1と異なる。測距システムは、例えば、撮像装置に搭載される。測距システムが搭載された撮像装置では、当該測距システムによって検出された、当該測距離システムと検知対象物60との距離に基づいて、当該検知対象物60にピントを自動で合わせることができる。
図26は、図10に示される光学的位置検出システム1の動作制御部23が送出する制御信号に対応する、本変形例に係る動作制御部23が送出する制御信号の一例を示す図である。
2 照明部
3 受光部
14 受光面
21 位置検出部
22 判定部
23 動作制御部
50 光
60 検知対象物
70 測距システム
Claims (24)
- 光学的位置検出システムであって、
光を照射する照明部と、
検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部と、
前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する判定部と、
前記光学的位置検出システムの動作モードを制御する動作制御部と
を備え、
前記光学的位置検出システムは、前記照明部が第1光量で光を照射する第1動作モードと、前記照明部が前記第1光量よりも少ない第2光量で光を照射する第2動作モードとを有し、
前記動作制御部は、前記判定部で前記検知対象物が存在すると判定された場合には前記動作モードを前記第1動作モードに設定し、前記判定部で前記検知対象物が存在しないと判定された場合には前記動作モードを前記第2動作モードに設定し、
前記第1動作モードでは、前記位置検出部は、前記受光面を座標平面としたときの前記検知対象物の位置を示すx座標値及びy座標値と、当該座標平面に垂直な方向での前記検知対象物の位置を示すz座標値とを求め、
前記第2動作モードでは、前記位置検出部は、前記x座標値、前記y座標値及び前記z座標値のうちの前記z座標値のみを求める、光学的位置検出システム。 - 光学的位置検出システムであって、
光を照射する照明部と、
検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部と、
前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する判定部と、
前記光学的位置検出システムの動作モードを制御する動作制御部と
を備え、
前記光学的位置検出システムは、前記照明部が第1光量で光を照射する第1動作モードと、前記照明部が前記第1光量よりも少ない第2光量で光を照射する第2動作モードとを有し、
前記動作制御部は、前記判定部で前記検知対象物が存在すると判定された場合には前記動作モードを前記第1動作モードに設定し、前記判定部で前記検知対象物が存在しないと判定された場合には前記動作モードを前記第2動作モードに設定し、
前記位置検出部は、
前記第1動作モードでは、前記受光面に垂直な方向での前記検知対象物の位置を示すz座標値として、所定の演算式を用いて求める値をそのまま出力し、
前記第2動作モードでは、前記z座標値として、前記所定の演算式を用いて求まる値の所定数倍を出力する、光学的位置検出システム。 - 請求項1及び請求項2のいずれか1つに記載の光学的位置検出システムであって、
前記照明部での前記光の照射時間が一定時間において占める割合は、前記第1動作モードより前記第2動作モードの方が小さく設定される、光学的位置検出システム。 - 請求項1に記載の光学的位置検出システムであって、
前記第1動作モードでは、前記照明部は、所定の周期で前記光を照射し、
前記第1動作モードでは、前記位置検出部は、前記所定の周期より長い間隔で、前記x座標値、前記y座標値及び前記z座標値の少なくとも一つを求める、光学的位置検出システム。 - 請求項4に記載の光学的位置検出システムであって、
前記第1動作モードでは、前記位置検出部は、前記所定の周期より長い間隔で、前記x座標値及び前記y座標値を求める、光学的位置検出システム。 - 請求項4及び請求項5のいずれか一つに記載の光学的位置検出システムであって、
前記第1動作モードでは、前記位置検出部は、前記所定の周期より長い間隔で、前記z座標値を求める、光学的位置検出システム。 - 請求項5に記載の光学的位置検出システムであって、
前記第1動作モードでは、前記位置検出部は、前記x座標値及び前記y座標値を交互に求める、光学的位置検出システム。 - 請求項7に記載の光学的位置検出システムであって、
前記位置検出部では、前記x座標値及び前記y座標値を求める演算回路が共通となっている、光学的位置検出システム。 - 請求項7及び請求項8のいずれか一つに記載の光学的位置検出システムであって、
前記位置検出部では、前記x座標値及び前記y座標値を出力する出力端子が共通となっている、光学的位置検出システム。 - 請求項7乃至請求項9のいずれか一つに記載の光学的位置検出システムであって、
前記第1動作モードでは、前記位置検出部は、前記所定の周期より長い間隔で、前記x座標値、前記y座標値及び前記z座標値を求め、
前記第1動作モードでは、前記位置検出部は、前記x座標値、前記y座標値及び前記z座標値を交互に求め、
前記位置検出部では、前記x座標値、前記y座標値及び前記z座標値を出力する出力端子が共通となっている、光学的位置検出システム。 - 光学的位置検出システムであって、
光を照射する照明部と、
検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部と、
前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する判定部と、
前記光学的位置検出システムの動作モードを制御する動作制御部と
を備え、
前記光学的位置検出システムは、第1動作モードと、前記照明部での前記光の照射時間が一定時間において占める割合が当該第1動作モードよりも小さい第2動作モードとを有し、
前記動作制御部は、前記判定部で前記検知対象物が存在すると判定された場合には前記動作モードを前記第1動作モードに設定し、前記判定部で前記検知対象物が存在しないと判定された場合には前記動作モードを前記第2動作モードに設定し、
前記第1動作モードでは、前記位置検出部は、前記受光面を座標平面としたときの前記検知対象物の位置を示すx座標値及びy座標値と、当該座標平面に垂直な方向での前記検知対象物の位置を示すz座標値とを求め、
前記第2動作モードでは、前記位置検出部は、前記x座標値、前記y座標値及び前記z座標値のうちの前記z座標値のみを求める、光学的位置検出システム。 - 請求項11に記載の光学的位置検出システムであって、
前記照明部は、所定の周期で光を照射し、
前記第1及び第2動作モードの間では、前記照明部での前記所定の周期が互いに異なる、光学的位置検出システム。 - 請求項11に記載の光学的位置検出システムであって、
前記照明部は、所定の周期で光を照射し、
前記第1及び第2動作モードの間では、前記所定の周期において前記光の照射時間が占める割合が互いに異なる、光学的位置検出システム。 - 請求項1乃至請求項13のいずれか一つに記載の光学的位置検出システムが有する前記判定部及び前記動作制御部を備える制御装置。
- 請求項8乃至請求項10のいずれか一つに記載の光学的位置検出システムが有する前記位置検出部を備える位置検出装置。
- 光を照射する照明部と、検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部とを有する光学的位置検出システムを制御するための制御プログラムであって、
前記光学的位置検出システムに、
(a)前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する工程と、
(b)前記工程(a)で前記検知対象物が存在すると判定された場合に、前記光学的位置検出システムの動作モードを、前記照明部が第1光量で光を照射する第1動作モードに設定する工程と、
(c)前記工程(a)で前記検知対象物が存在しないと判定された場合に、前記動作モードを、前記照明が前記第1光量よりも少ない第2光量で光を照射する第2動作モードに設定する工程と、
(d)前記第1動作モードにおいて、前記位置検出部が、前記受光面を座標平面としたときの前記検知対象物の位置を示すx座標値及びy座標値と、当該座標平面に垂直な方向での前記検知対象物の位置を示すz座標値とを求める工程と、
(e)前記第2動作モードにおいて、前記位置検出部が、前記x座標値、前記y座標値及び前記z座標値のうちの前記z座標値のみを求める工程と
を実行させるための制御プログラム。 - 光を照射する照明部と、検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部とを有する光学的位置検出システムを制御するための制御プログラムであって、
前記光学的位置検出システムに、
(a)前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する工程と、
(b)前記工程(a)で前記検知対象物が存在すると判定された場合に、前記光学的位置検出システムの動作モードを、前記照明部が第1光量で光を照射する第1動作モードに設定する工程と、
(c)前記工程(a)で前記検知対象物が存在しないと判定された場合に、前記動作モードを、前記照明が前記第1光量よりも少ない第2光量で光を照射する第2動作モードに設定する工程と、
(d)前記第1動作モードにおいて、前記位置検出部が、前記受光面に垂直な方向での前記検知対象物の位置を示すz座標値として、所定の演算式を用いて求める値をそのまま出力する工程と、
(e)前記第2動作モードにおいて、前記位置検出部が、前記z座標値として、前記所定の演算式を用いて求まる値の所定数倍を出力する工程と
を実行させるための制御プログラム。 - 光を照射する照明部と、検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物の位置を検出する位置検出部とを有する光学的位置検出システムを制御するための制御プログラムであって、
前記光学的位置検出システムに、
(a)前記位置検出部での検出結果に基づいて前記検知対象物の有無を判定する工程と、
(b)前記工程(a)で前記検知対象物が存在すると判定された場合に、前記光学的位置検出システムの動作モードを、前記照明部での前記光の照射時間が一定時間において占める割合が第1の割合となる第1動作モードに設定する工程と、
(c)前記工程(a)で前記検知対象物が存在しないと判定された場合に、前記動作モードを、前記照明部での前記光の照射時間が前記一定時間において占める割合が前記第1の割合よりも小さい第2の割合となる第2動作モードに設定する工程と、
(d)前記第1動作モードにおいて、前記位置検出部が、前記受光面を座標平面としたときの前記検知対象物の位置を示すx座標値及びy座標値と、当該座標平面に垂直な方向での前記検知対象物の位置を示すz座標値とを求める工程と、
(e)前記第2動作モードにおいて、前記位置検出部が、前記x座標値、前記y座標値及び前記z座標値のうちの前記z座標値のみを求める工程と
を実行させるための制御プログラム。 - 測距システムであって、
光を照射する照明部と、
検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記測距システムと前記検知対象物との距離を検出する距離検出部と、
前記距離検出部での検出結果に基づいて前記検知対象物の有無を判定する判定部と、
前記測距システムの動作モードを制御する動作制御部と
を備え、
前記測距システムは、前記照明部が第1光量で光を照射する第1動作モードと、前記照明部が前記第1光量よりも少ない第2光量で光を照射する第2動作モードとを有し、
前記動作制御部は、前記判定部で前記検知対象物が存在すると判定された場合には前記動作モードを前記第1動作モードに設定し、前記判定部で前記検知対象物が存在しないと判定された場合には前記動作モードを前記第2動作モードに設定し、
前記距離検出部は、
前記第1動作モードでは、前記測距システムと前記検知対象物との距離として、所定の演算式を用いて求める値をそのまま出力し、
前記第2動作モードでは、前記測距システムと前記検知対象物との距離として、前記所定の演算式を用いて求まる値の所定数倍を出力する、測距システム。 - 請求項19に記載の測距システムであって、
前記照明部での前記光の照射時間が一定時間において占める割合は、前記第1動作モードより前記第2動作モードの方が小さく設定される、測距システム。 - 請求項20に記載の測距システムであって、
前記照明部は、所定の周期で光を照射し、
前記第1及び第2動作モードの間では、前記照明部での前記所定の周期が互いに異なる、測距システム。 - 請求項20に記載の測距システムであって、
前記照明部は、所定の周期で光を照射し、
前記第1及び第2動作モードの間では、前記所定の周期において前記光の照射時間が占める割合が互いに異なる、測距システム。 - 請求項19乃至請求項22のいずれか一つに記載の測距システムが有する前記判定部及び前記動作制御部を備える制御装置。
- 光を照射する照明部と、検知対象物で反射された前記光を受光面で受光することによって得られた電気信号に基づいて、前記検知対象物からの距離を検出する距離検出部とを有する測距システムを制御するための制御プログラムであって、
前記測距システムに、
(a)前記距離検出部での検出結果に基づいて前記検知対象物の有無を判定する工程と、
(b)前記工程(a)で前記検知対象物が存在すると判定された場合に、前記測距システムの動作モードを、前記照明部が第1光量で光を照射する第1動作モードに設定する工程と、
(c)前記工程(a)で前記検知対象物が存在しないと判定された場合に、前記動作モードを、前記照明が前記第1光量よりも少ない第2光量で光を照射する第2動作モードに設定する工程と、
(d)前記第1動作モードにおいて、前記距離検出部が、前記測距システムと前記検知対象物との距離として、所定の演算式を用いて求める値をそのまま出力する工程と、
(e)前記第2動作モードにおいて、前記距離検出部が、前記測距システムと前記検知対象物との距離として、前記所定の演算式を用いて求まる値の所定数倍を出力する工程と
を実行させるための制御プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014052024A JP6355014B2 (ja) | 2014-03-14 | 2014-03-14 | 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム |
| PCT/JP2015/054116 WO2015137050A1 (ja) | 2014-03-14 | 2015-02-16 | 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014052024A JP6355014B2 (ja) | 2014-03-14 | 2014-03-14 | 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015175712A JP2015175712A (ja) | 2015-10-05 |
| JP6355014B2 true JP6355014B2 (ja) | 2018-07-11 |
Family
ID=54071501
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014052024A Active JP6355014B2 (ja) | 2014-03-14 | 2014-03-14 | 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6355014B2 (ja) |
| WO (1) | WO2015137050A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101859630B1 (ko) * | 2016-03-14 | 2018-05-18 | 체이시로보틱스(주) | 근접 센서 및 이의 전력 사용 방법 |
| JP6894775B2 (ja) * | 2017-06-20 | 2021-06-30 | キヤノン株式会社 | 測距システム及びその制御方法 |
| JP7021885B2 (ja) * | 2017-09-11 | 2022-02-17 | 株式会社日立エルジーデータストレージ | 距離測定装置 |
| JP2020076619A (ja) * | 2018-11-07 | 2020-05-21 | ソニーセミコンダクタソリューションズ株式会社 | 投光制御装置、投光制御方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4993087B2 (ja) * | 2007-03-28 | 2012-08-08 | 株式会社Ihi | レーザ監視装置 |
| JP5589547B2 (ja) * | 2010-05-13 | 2014-09-17 | セイコーエプソン株式会社 | 光学式検出装置、表示装置及び電子機器 |
| JP2011257336A (ja) * | 2010-06-11 | 2011-12-22 | Seiko Epson Corp | 光学式位置検出装置、電子機器及び表示装置 |
-
2014
- 2014-03-14 JP JP2014052024A patent/JP6355014B2/ja active Active
-
2015
- 2015-02-16 WO PCT/JP2015/054116 patent/WO2015137050A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015137050A1 (ja) | 2015-09-17 |
| JP2015175712A (ja) | 2015-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8411289B2 (en) | Optical position detection device | |
| JP6355014B2 (ja) | 光学的位置検出システム、制御装置、位置検出装置、制御プログラムおよび測距システム | |
| JPWO2018181250A1 (ja) | 距離画像生成装置及び距離画像生成方法 | |
| EP3202467B1 (en) | Treadmill and control method for controlling the treadmill belt thereof | |
| JP6270813B2 (ja) | 複数の光源を有するモーションセンサ装置 | |
| JP5617554B2 (ja) | 距離測定装置、および距離測定プログラム | |
| RU2014123558A (ru) | Детектирование наличия объекта с использованием осветительного устройства с расщепленным пучком | |
| RU2018136743A (ru) | Адаптивная система освещения для зеркального компонента и способ управления адаптивной системой освещения | |
| CN104685318A (zh) | 具有多个光源的运动传感器装置 | |
| JP2017125829A (ja) | 距離測定装置、移動体装置及び距離測定方法 | |
| JP2017502476A5 (ja) | ||
| TW201335802A (zh) | 光學導航裝置 | |
| JP2017156625A5 (ja) | ||
| TW201502884A (zh) | 具有熱感應器之導航裝置 | |
| KR102251374B1 (ko) | 이미지 센싱 장치 및 그 장치의 동작 방법 | |
| US12118165B2 (en) | Proximity detection device and method for detecting proximity | |
| KR20120000234A (ko) | 조도 센서를 이용한 백색광 3차원 스캐너의 자동 노출 제어 방법 | |
| JP2012008431A (ja) | オートフォーカス装置 | |
| JP2015152372A (ja) | 位置計測装置および位置計測方法 | |
| JP7264474B2 (ja) | 物体検出装置及び物体検出方法 | |
| JP6124215B2 (ja) | 照明システムおよび照明制御装置 | |
| JP6101561B2 (ja) | 光学式測距装置 | |
| JP6733495B2 (ja) | 距離測定装置 | |
| JP2006318677A5 (ja) | ||
| JP2016080632A (ja) | 光学式検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171121 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180531 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180531 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6355014 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |