JP6297150B2 - 血管の超音波データの空間的に異なるサブボリュームを位置合わせするための方法 - Google Patents
血管の超音波データの空間的に異なるサブボリュームを位置合わせするための方法Info
- Publication number
- JP6297150B2 JP6297150B2 JP2016528626A JP2016528626A JP6297150B2 JP 6297150 B2 JP6297150 B2 JP 6297150B2 JP 2016528626 A JP2016528626 A JP 2016528626A JP 2016528626 A JP2016528626 A JP 2016528626A JP 6297150 B2 JP6297150 B2 JP 6297150B2
- Authority
- JP
- Japan
- Prior art keywords
- dimensional
- doppler
- subvolume
- additional
- map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 27
- 238000002604 ultrasonography Methods 0.000 title claims description 24
- 230000002792 vascular Effects 0.000 title claims description 5
- 210000004204 blood vessel Anatomy 0.000 claims description 35
- 230000003595 spectral effect Effects 0.000 claims description 33
- 230000017531 blood circulation Effects 0.000 claims description 27
- 238000012545 processing Methods 0.000 claims description 6
- 238000009499 grossing Methods 0.000 claims description 3
- 230000002123 temporal effect Effects 0.000 claims 1
- 239000000523 sample Substances 0.000 description 68
- 210000001715 carotid artery Anatomy 0.000 description 26
- 208000031481 Pathologic Constriction Diseases 0.000 description 19
- 208000037804 stenosis Diseases 0.000 description 19
- 230000036262 stenosis Effects 0.000 description 19
- 238000001228 spectrum Methods 0.000 description 12
- 210000004004 carotid artery internal Anatomy 0.000 description 11
- 210000001168 carotid artery common Anatomy 0.000 description 10
- 210000000269 carotid artery external Anatomy 0.000 description 10
- 210000003484 anatomy Anatomy 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 230000000875 corresponding effect Effects 0.000 description 5
- 230000034994 death Effects 0.000 description 5
- 231100000517 death Toxicity 0.000 description 5
- 238000013507 mapping Methods 0.000 description 5
- 208000006011 Stroke Diseases 0.000 description 4
- 208000006170 carotid stenosis Diseases 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 230000000750 progressive effect Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000009897 systematic effect Effects 0.000 description 3
- 206010007687 Carotid artery stenosis Diseases 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 210000001367 artery Anatomy 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000000601 blood cell Anatomy 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012216 screening Methods 0.000 description 2
- 210000005166 vasculature Anatomy 0.000 description 2
- 201000001320 Atherosclerosis Diseases 0.000 description 1
- 208000014882 Carotid artery disease Diseases 0.000 description 1
- 208000032382 Ischaemic stroke Diseases 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000007630 basic procedure Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 208000037876 carotid Atherosclerosis Diseases 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000009556 duplex ultrasonography Methods 0.000 description 1
- 238000002592 echocardiography Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 238000005206 flow analysis Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000000541 pulsatile effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000000527 sonication Methods 0.000 description 1
- 238000010183 spectrum analysis Methods 0.000 description 1
- 230000002966 stenotic effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000002379 ultrasonic velocimetry Methods 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0891—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8925—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being a two-dimensional transducer configuration, i.e. matrix or orthogonal linear arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8979—Combined Doppler and pulse-echo imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/5206—Two-dimensional coordinated display of distance and direction; B-scan display
- G01S7/52065—Compound scan display, e.g. panoramic imaging
Description
2次元(図4参照)又は3次元(図6参照)のいずれかでの血管マッピングに続いて、ドップラーデータが、狭窄の分類に役立つピーク収縮期の速度を抽出するために、全ての素子から取得される。さらに所望すれば、以下で説明するように、ドップラースペクトルによって、狭窄部の疑わしい箇所で抽出して、診断をさらに補助することができる。

ここでRM(i+k)は、
CVは、相互相関kのベクトルである。
Rkは、インデックスkに対応する行である。運動の方向が不変であると仮定され且つ相関が重複領域の開始部を見つけるために実行されるので、我々は、Rk〜Rpが重複領域であることを知っている。RkからRpへのボリュームデータは、対応するボリュームに割り当てられる。これは、S1,S2,S3等のステッチされるボリュームをもたらす。ステッチされるボリュームは、運動の方向に積み重ねられ、補間及び/又は平滑化によって接続される。
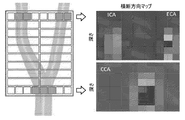
ブロック72では、ドップラー信号は、上述したように頸動脈のボリューム領域から取得され、ドップラー信号は、不要なノイズ信号成分を除去するために前処理される(74)。血管特定ステップ76では、取得したドップラー信号が血管情報(CCA,ICA,ECA又は分岐点)を含んでいるかどうかが識別される。これは、事前に規定されたパワーしきい値を用いてドップラーパワーについて行われる。時間領域のパワー(信号の長さで除算された全ての値の二乗の和)が、頸動脈の全てのサンプル・ボリュームについて計算される。次に、平均パワーが、全てのサンプル・ボリュームから計算される。最後に、この平均値を上回る最大パワーを示すサンプル・ボリュームが、血管情報を有するセグメントとしてみなされる。
ピーク収縮期の速度は、ステップ88で、標準的なドップラー方程式を使用して、ドップラー角度及び最大ドップラーシフトから推定される:
v=(Fs×c)/(2×Ft×cosθ)
ここで、Fsは、ドップラー周波数シフトであり、cは、身体内の音速であり(公称1540m/sであると仮定する)、Ftは、入射ビームの周波数であり、θは、流れ方向に対するビームの入射角である。
乱流の基準=(上部トレース下の面積−下部トレース下の面積)/上部トレース下の面積)
Claims (12)
- 血管の超音波データの空間的に異なるサブボリュームを位置合わせするための方法であって:
超音波トランスデューサ素子の2次元アレイの素子を用いて、各超音波トランスデューサ素子によって対向する空間的に異なる深さのスキャニングから第1のサブボリューム内の血管の時間的に不連続な信号を取得するステップであって、前記2次元アレイは、該取得するステップの間に前記血管に対して第1の位置に配置される、取得するステップと;
各超音波トランスデューサ素子から受信した前記時間的に不連続な信号をドップラー処理して、各超音波トランスデューサ素子によって対向する第1のサブボリューム内のスキャン深さのスペクトルドップラーデータを生成するステップと;
前記スペクトルドップラーデータの第1の3次元マップを第1のサブボリューム内の前記血管に対する前記2次元アレイの位置に空間的な関係で生成するステップと;
超音波トランスデューサ素子の前記2次元アレイの素子を独立に動作させて、各超音波トランスデューサ素子によって対向する空間的に異なる深さのスキャニングから第2のサブボリューム内の前記血管の時間的に不連続な信号を取得するステップであって、前記2次元アレイは、該取得するステップの間に前記血管に対して第2の位置に配置され、第2のサブボリュームは、第1のサブボリュームと少なくとも部分的に重なる領域を有する、取得するステップと;
各超音波トランスデューサ素子から受信した前記時間的に不連続な信号をドップラー処理して、各超音波トランスデューサ素子によって対向する第2のサブボリューム内のスキャン深さのスペクトルドップラーデータを生成するステップと;
前記スペクトルドップラーデータの第2の3次元マップを第2のサブボリューム内の前記血管に対する前記2次元アレイの位置に空間的な関係で生成するステップと;
前記2つの3次元マップのうちの一致するスペクトルドップラーデータの1つ以上の特定された領域が前記部分的に重なる領域に対応することに基づいて、第1の3次元マップを第2の3次元マップと位置合わせするステップと;
該位置合わせされた第1及び第2の3次元マップから前記血管の血流の3次元結合マップを生成するステップと;を含む、
方法。 - 前記2次元アレイが前記血管に対して追加の位置に配置されるときに、前記2次元アレイを用いて、前記血管の追加のサブボリュームの時間的に不連続な追加の信号を取得するステップであって、各追加のサブボリュームは、少なくとも1つの他のサブボリュームと部分的に重なる領域を有する、取得するステップと;
該時間的に不連続な追加の信号をドップラー処理して、各超音波トランスデューサ素子によって対向する前記追加のサブボリューム内のスキャン深さの追加のスペクトルドップラーデータを生成するステップと;
前記追加のスペクトルドップラーデータの追加の3次元マップを前記追加のサブボリューム内の前記血管に対する前記2次元アレイの前記追加の位置に空間的な関係で生成するステップと;
前記2つの3次元マップのうちの一致するスペクトルドップラーデータの前記特定された領域が前記部分的に重なる領域に対応することに基づいて、前記追加の3次元マップのそれぞれを少なくとも1つの他の3次元マップと位置合わせするステップと;
第1、第2及び追加の3次元マップから3次元結合マップを生成するステップと;をさらに含む、
請求項1に記載の方法。 - 前記一致するスペクトルドップラーデータは、時間領域のドップラーデータをさらに含む、請求項1に記載の方法。
- 前記時間領域のドップラーデータは、ピーク収縮期の速度データをさらに含む、請求項3に記載の方法。
- 生成された各3次元マップは、各超音波トランスデューサ素子の前方の深さ寸法に延びる複数のボクセルをさらに含む、請求項1に記載の方法。
- 前記深さ寸法に延びる前記複数のボクセルは、ボクセルの列を含み、各ボクセルは、ドップラーフロー値を有する、請求項5に記載の方法。
- 位置合わせするステップは、1つの3次元マップのドップラーフロー値を有するボクセルの列を、別の3次元マップの同様のドップラーフロー値を有するボクセルの列と一致させるステップをさらに含む、請求項6に記載の方法。
- 前記ドップラーフロー値は、流速値をさらに含む、請求項6に記載の方法。
- 3次元マップを位置合わせするステップは、空間的な基準で、1つの3次元マップのデータを別の3次元マップのデータと相関付けるステップをさらに含む、請求項1に記載の方法。
- 取得するステップは、非位相合せ方法で動作するように構成された2次元アレイの素子を用いて血管の時間的に不連続な信号を取得するステップをさらに含む、請求項1に記載の方法。
- 第1及び第2の3次元マップを生成するステップは、第1及び第2の3次元マップを空間的に部分的に重なるように生成するステップをさらに含む、請求項1に記載の方法。
- 位置合わせされた第1及び第2の3次元マップを補間又は平滑化するステップをさらに含む、請求項1に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361857833P | 2013-07-24 | 2013-07-24 | |
| US61/857,833 | 2013-07-24 | ||
| PCT/IB2014/063077 WO2015011599A1 (en) | 2013-07-24 | 2014-07-14 | Method for aligning spatially different subvolumes of ultrasonic data of a blood vessel |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016525406A JP2016525406A (ja) | 2016-08-25 |
| JP2016525406A5 JP2016525406A5 (ja) | 2017-10-26 |
| JP6297150B2 true JP6297150B2 (ja) | 2018-03-20 |
Family
ID=51582431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016528626A Active JP6297150B2 (ja) | 2013-07-24 | 2014-07-14 | 血管の超音波データの空間的に異なるサブボリュームを位置合わせするための方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11382596B2 (ja) |
| EP (1) | EP3024397B1 (ja) |
| JP (1) | JP6297150B2 (ja) |
| CN (1) | CN105407808B (ja) |
| WO (1) | WO2015011599A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015154885A (ja) * | 2014-02-21 | 2015-08-27 | セイコーエプソン株式会社 | 血圧計測装置 |
| EP2989986B1 (en) * | 2014-09-01 | 2019-12-18 | Samsung Medison Co., Ltd. | Ultrasound diagnosis apparatus and method of operating the same |
| US10575825B2 (en) * | 2015-07-27 | 2020-03-03 | Siemens Medical Solutions Usa, Inc. | Doppler imaging |
| US10456113B2 (en) * | 2016-09-08 | 2019-10-29 | B-K Medical Aps | Wall-to-wall vessel segmentation in US imaging using a combination of VFI data and US imaging data |
| CN108627803B (zh) * | 2017-03-17 | 2021-10-08 | 南京理工大学 | 基于波束形成的频谱配对法及配对系统 |
| WO2018218441A1 (zh) * | 2017-05-27 | 2018-12-06 | 北京悦琦创通科技有限公司 | 谱图分析方法、装置和设备及计算机可读存储介质 |
| KR102072524B1 (ko) * | 2017-10-27 | 2020-02-03 | (주)코리센 | 지정맥 인식 장치 |
| CN108279417A (zh) * | 2018-01-08 | 2018-07-13 | 上海应用技术大学 | 超声波测量薄壁复合钢管厚度的方法 |
| CN110584709B (zh) * | 2019-08-14 | 2022-03-11 | 深圳市德力凯医疗设备股份有限公司 | 一种脑血流数据的采集方法、存储介质及超声设备 |
| EP4119060A1 (en) * | 2021-07-15 | 2023-01-18 | Koninklijke Philips N.V. | Apparatuses, systems and methods for spectral pulse wave doppler ultrasound measurements |
| CN116965849A (zh) * | 2022-04-24 | 2023-10-31 | 武汉联影医疗科技有限公司 | 信号处理方法、装置、计算机设备、存储介质和超声仪器 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4202215A (en) * | 1978-10-26 | 1980-05-13 | Kurt Orban Company, Inc. | Sonic pulse-echo method and apparatus for determining attenuation coefficients |
| US5474073A (en) * | 1994-11-22 | 1995-12-12 | Advanced Technology Laboratories, Inc. | Ultrasonic diagnostic scanning for three dimensional display |
| US7399279B2 (en) * | 1999-05-28 | 2008-07-15 | Physiosonics, Inc | Transmitter patterns for multi beam reception |
| US7534209B2 (en) * | 2000-05-26 | 2009-05-19 | Physiosonics, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| ATE447190T1 (de) * | 1999-05-28 | 2009-11-15 | Physiosonics Inc | Vorrichtung und verfahren zur vermessung und nachführung des blutflusses und zur bestimmung von blutflussparametern |
| US6682483B1 (en) | 1999-05-28 | 2004-01-27 | Vuesonix Sensors, Inc. | Device and method for mapping and tracking blood flow and determining parameters of blood flow |
| US6773402B2 (en) * | 2001-07-10 | 2004-08-10 | Biosense, Inc. | Location sensing with real-time ultrasound imaging |
| US7285094B2 (en) * | 2002-01-30 | 2007-10-23 | Nohara Timothy J | 3D ultrasonic imaging apparatus and method |
| US7347820B2 (en) | 2002-11-06 | 2008-03-25 | Koninklijke Philips Electronics N.V. | Phased array acoustic system for 3D imaging of moving parts |
| CN1764849B (zh) * | 2003-03-27 | 2010-05-26 | 皇家飞利浦电子股份有限公司 | 通过广角三维超声成像引导侵入式医疗设备 |
| KR101316796B1 (ko) * | 2005-04-14 | 2013-10-11 | 베라소닉스, 인코포레이티드 | 화소 배향 프로세싱을 갖는 초음파 이미지화 시스템 |
| NZ568721A (en) * | 2005-11-07 | 2011-01-28 | Signostics Ltd | Portable ultrasound system with probe and handheld display linked by a cable to locate around a user's neck |
| WO2007107925A2 (en) | 2006-03-21 | 2007-09-27 | Koninklijke Philips Electronics, N.V. | Optimization of velocity scale for color tissue doppler imaging |
| US20090024034A1 (en) * | 2006-10-19 | 2009-01-22 | Romain Moreau-Gobard | Relative position determination medical ultrasound scans |
| US20080183077A1 (en) * | 2006-10-19 | 2008-07-31 | Siemens Corporate Research, Inc. | High intensity focused ultrasound path determination |
| US7920731B2 (en) * | 2007-03-27 | 2011-04-05 | Siemens Medical Solutions Usa, Inc. | Bleeding detection using a blanket ultrasound device |
| JP2009131420A (ja) | 2007-11-29 | 2009-06-18 | Toshiba Corp | 超音波画像診断装置 |
| US8547402B2 (en) * | 2009-10-07 | 2013-10-01 | Hologic, Inc. | Displaying computer-aided detection information with associated breast tomosynthesis image information |
| CN102333486A (zh) * | 2009-02-24 | 2012-01-25 | 皇家飞利浦电子股份有限公司 | 具有三角形传感器几何结构的超声脉管流量传感器 |
| WO2011027253A1 (en) | 2009-09-04 | 2011-03-10 | Koninklijke Philips Electronics, N.V. | Ultrasonic elastographic strain imaging with fade control |
| US20110125022A1 (en) * | 2009-11-25 | 2011-05-26 | Siemens Medical Solutions Usa, Inc. | Synchronization for multi-directional ultrasound scanning |
| US9204858B2 (en) * | 2010-02-05 | 2015-12-08 | Ultrasonix Medical Corporation | Ultrasound pulse-wave doppler measurement of blood flow velocity and/or turbulence |
| JP6050246B2 (ja) * | 2010-12-22 | 2016-12-21 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 低コスト振動子を用いる自動ドップラ速度計測 |
| EP2725983B1 (en) * | 2011-06-30 | 2018-02-28 | Koninklijke Philips N.V. | Apparatus for automated ultrasonic doppler angle and flow velocity estimation |
| WO2013054240A1 (en) * | 2011-10-10 | 2013-04-18 | Koninklijke Philips Electronics N.V. | Depth map processing |
| EP2790585B1 (en) * | 2011-12-16 | 2023-02-08 | Koninklijke Philips N.V. | Automatic blood vessel identification by name |
| CN104114101B (zh) * | 2011-12-16 | 2016-08-24 | 皇家飞利浦有限公司 | 自动多普勒脉动周期选择 |
| US9392992B2 (en) * | 2012-02-28 | 2016-07-19 | Siemens Medical Solutions Usa, Inc. | High intensity focused ultrasound registration with imaging |
| EP3024395B1 (en) * | 2013-07-24 | 2017-10-18 | Koninklijke Philips N.V. | Non-imaging two dimensional array probe and system for classifying carotid stenosis |
-
2014
- 2014-07-14 EP EP14771366.3A patent/EP3024397B1/en active Active
- 2014-07-14 CN CN201480041677.8A patent/CN105407808B/zh active Active
- 2014-07-14 JP JP2016528626A patent/JP6297150B2/ja active Active
- 2014-07-14 WO PCT/IB2014/063077 patent/WO2015011599A1/en active Application Filing
- 2014-07-14 US US14/906,611 patent/US11382596B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105407808B (zh) | 2018-12-04 |
| JP2016525406A (ja) | 2016-08-25 |
| EP3024397A1 (en) | 2016-06-01 |
| US11382596B2 (en) | 2022-07-12 |
| CN105407808A (zh) | 2016-03-16 |
| EP3024397B1 (en) | 2017-12-20 |
| US20160151038A1 (en) | 2016-06-02 |
| WO2015011599A1 (en) | 2015-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6297150B2 (ja) | 血管の超音波データの空間的に異なるサブボリュームを位置合わせするための方法 | |
| JP6389521B2 (ja) | 頸動脈狭窄の自動スクリーニングのための非撮像型2次元アレイプローブ及びシステム | |
| JP6205056B2 (ja) | 非イメージング2次元アレイプローブ及び頸動脈狭窄を分類するシステム | |
| US11635514B2 (en) | Imaging methods and apparatuses for performing shear wave elastography imaging | |
| RU2667617C2 (ru) | Система и способ эластографических измерений | |
| US9398898B2 (en) | Multiple beam spectral doppler in medical diagnostic ultrasound imaging | |
| EP2967490B1 (en) | Ultrasound vector flow imaging (vfi) with curve tracing | |
| US20150080730A1 (en) | Ultrasonic diagnostic apparatus, medical image processing apparatus, and medical image processing method | |
| CN109310399B (zh) | 医学超声图像处理设备 | |
| JP2016506809A (ja) | 超音波画像化システム及び方法 | |
| US20060004291A1 (en) | Methods and apparatus for visualization of quantitative data on a model | |
| JP7285826B2 (ja) | 肺超音波検査におけるbラインの検知、提示及び報告 | |
| JP2011130825A (ja) | 超音波データ処理装置およびそのプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170913 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170913 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6297150 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |