JP6261185B2 - Lifting module and lifting device using the lifting module - Google Patents
Lifting module and lifting device using the lifting module Download PDFInfo
- Publication number
- JP6261185B2 JP6261185B2 JP2013099172A JP2013099172A JP6261185B2 JP 6261185 B2 JP6261185 B2 JP 6261185B2 JP 2013099172 A JP2013099172 A JP 2013099172A JP 2013099172 A JP2013099172 A JP 2013099172A JP 6261185 B2 JP6261185 B2 JP 6261185B2
- Authority
- JP
- Japan
- Prior art keywords
- lifting
- rotating
- elevating
- lifting device
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003028 elevating effect Effects 0.000 claims description 86
- 230000033001 locomotion Effects 0.000 claims description 18
- 230000002265 prevention Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 16
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000001965 increasing effect Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02F—OPTICAL DEVICES OR ARRANGEMENTS FOR THE CONTROL OF LIGHT BY MODIFICATION OF THE OPTICAL PROPERTIES OF THE MEDIA OF THE ELEMENTS INVOLVED THEREIN; NON-LINEAR OPTICS; FREQUENCY-CHANGING OF LIGHT; OPTICAL LOGIC ELEMENTS; OPTICAL ANALOGUE/DIGITAL CONVERTERS
- G02F1/00—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics
- G02F1/01—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour
- G02F1/13—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour based on liquid crystals, e.g. single liquid crystal display cells
- G02F1/1303—Apparatus specially adapted to the manufacture of LCDs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- G—PHYSICS
- G02—OPTICS
- G02F—OPTICAL DEVICES OR ARRANGEMENTS FOR THE CONTROL OF LIGHT BY MODIFICATION OF THE OPTICAL PROPERTIES OF THE MEDIA OF THE ELEMENTS INVOLVED THEREIN; NON-LINEAR OPTICS; FREQUENCY-CHANGING OF LIGHT; OPTICAL LOGIC ELEMENTS; OPTICAL ANALOGUE/DIGITAL CONVERTERS
- G02F1/00—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics
- G02F1/01—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour
- G02F1/13—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour based on liquid crystals, e.g. single liquid crystal display cells
- G02F1/1313—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour based on liquid crystals, e.g. single liquid crystal display cells specially adapted for a particular application
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0214—Articles of special size, shape or weigh
- B65G2201/022—Flat
Landscapes
- Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Liquid Crystal (AREA)
Description
本発明は、水平姿勢を維持している、LCDあるいはLEDパネルなどのパネル部材を担持しながら昇降することができる昇降モジュールと、この昇降モジュールを使用している昇降装置に関する。さらに本発明は、簡単な構造のパネル部材を昇降させ、パネルの水平姿勢を容易に制御し、重量のあるパネルを所望の位置まで正確に昇降させる昇降モジュール、及びこの昇降モジュールを使用している昇降装置に関する。 The present invention relates to an elevating module capable of moving up and down while supporting a panel member such as an LCD or an LED panel maintaining a horizontal posture, and an elevating apparatus using the elevating module. Furthermore, the present invention uses a lifting module that lifts and lowers a panel having a simple structure, easily controls the horizontal posture of the panel, and accurately lifts and lowers a heavy panel to a desired position. The present invention relates to a lifting device.
LCDあるいはLEDパネルなどのパネル部材の製造工程において、パネルは例えば表面検査のために水平姿勢で昇降される。 In the manufacturing process of a panel member such as an LCD or LED panel, the panel is raised and lowered in a horizontal posture for surface inspection, for example.
従来、水平姿勢でパネル部材を昇降させる昇降装置は、一つあるいは複数の昇降モジュールを使用する。このような昇降モジュールでは、昇降部材の傾斜面は、昇降モジュールを昇降させるために、ステッピングモータあるいはサーボモータにより固定部材の傾斜面に沿って移動する。言い換えると、昇降モジュールは昇降運動のために楔形状である。 Conventionally, a lifting device that lifts and lowers a panel member in a horizontal posture uses one or a plurality of lifting modules. In such an elevating module, the inclined surface of the elevating member is moved along the inclined surface of the fixed member by a stepping motor or a servo motor in order to elevate the elevating module. In other words, the lifting module is wedge-shaped for lifting movement.
楔形状の昇降モジュールは、数多くの力伝達部品を使用して、ステッピングモータあるいはサーボモータ回転運動を昇降部材の直線的で垂直な運動に変換するために複雑な構造を有する。このような複雑な構造により、昇降運動および位置決めの正確な制御は困難になる。 The wedge-shaped lifting module has a complex structure for converting a stepping motor or servo motor rotational motion into a linear and vertical motion of the lifting member using a number of force transmission components. Such a complex structure makes it difficult to accurately control lifting and positioning.
さらに、前述の一つあるいは複数の昇降モジュールを備えた昇降装置には、LCDあるいはLEDパネルなどのパネル部材の水平姿勢(高さ)を制御する点で難しさがある。さらに、このような昇降モジュールには、LCDあるいはLEDパネルなどのパネル部材の昇降位置を正確に制御する面でも難しさがある。 Further, the above-described lifting device including one or a plurality of lifting modules has difficulty in controlling the horizontal posture (height) of a panel member such as an LCD or LED panel. Further, such a lifting module has difficulty in accurately controlling the lifting position of a panel member such as an LCD or LED panel.
他方、テレビなどのフラットパネルディスプレイのスクリーンが、広くなるにつれてディスプレイエリアに使用されるLCDあるいはLEDパネルも大きくなっている。結果として、LCDあるいはLEDパネルなどのパネル部材の重量も増大している。しかし、前述した、従来の楔型昇降モジュール及びこの昇降モジュールを使用した昇降装置にとって、ちょうど所望の位置で重量のあるLCDあるいはLEDパネルを水平姿勢に保つことは困難である。 On the other hand, as the screen of a flat panel display such as a television becomes wider, the LCD or LED panel used in the display area becomes larger. As a result, the weight of panel members such as LCD or LED panels is also increasing. However, it is difficult for the above-described conventional wedge-type lifting module and the lifting device using the lifting module to keep a heavy LCD or LED panel in a horizontal position at a desired position.
本発明の課題は、従来の昇降モジュール及びこの昇降モジュールを使用している昇降装置の必要条件および/または問題を解決することである。 The object of the present invention is to solve the requirements and / or problems of a conventional lifting module and a lifting device using this lifting module.
本発明の一課題は、簡単な構造の、垂直方向に上昇および下降することができる昇降モジュール及びこの昇降モジュールを使用している昇降装置を提供することである。 An object of the present invention is to provide a lifting module having a simple structure and capable of moving up and down in the vertical direction and a lifting device using the lifting module.
本発明の別の課題は、パネル部材の水平方向の姿勢の簡単な制御を可能にすることである。 Another object of the present invention is to enable simple control of the horizontal posture of the panel member.
さらに本発明の別の課題は、水平方向の姿勢を維持している重いパネル部材の昇降を可能にすることである。 Still another object of the present invention is to enable lifting and lowering of a heavy panel member that maintains a horizontal posture.
さらに本発明の別の課題は、高さの所望な位置まで重いパネル部材を正確に昇降させるのを可能にすることである。 Yet another object of the present invention is to allow a heavy panel member to be raised and lowered accurately to a desired height position.
少なくとも一つの上記の技術的課題を解決するための本発明の実施形態に関連した、昇降モジュール及び昇降モジュールを使用した昇降装置は、以下に記載した特徴を備えることができる。 The lifting module and the lifting device using the lifting module related to the embodiment of the present invention for solving at least one of the above technical problems may include the features described below.
本発明の主たる課題により、簡単な構造により、直接パネル部材を昇降させ、パネル部材の水平姿勢を容易に制御し、かつ重量のあるパネル部材の位置を正確に制御することができる。 According to the main problems of the present invention, with a simple structure, the panel member can be directly moved up and down, the horizontal posture of the panel member can be easily controlled, and the position of the heavy panel member can be accurately controlled.
本発明による昇降モジュールは、基底部材を含む固定部品と、
回転装置であって、この回転装置が、回転可能でかつ垂直方向に可動に、前記基底部材上に形成された、シャフト部材と連結された回転装置と、
昇降装置であって、この昇降装置が、前記回転装置および案内部材と接続しており、前記昇降装置が、回転装置の回転運動および上下方向での運動により駆動される固定部材上に形成された案内部材上に沿って上下に移動する昇降装置と、
駆動装置であって、この駆動装置が、回転装置を駆動するために、回転装置と昇降装置に連結している駆動装置とを備えている。
The lifting module according to the present invention includes a fixing component including a base member,
A rotating device, wherein the rotating device is rotatable and vertically movable, formed on the base member, and connected to a shaft member;
A lifting device, wherein the lifting device is connected to the rotating device and the guide member, and the lifting device is formed on a fixed member that is driven by the rotational motion and the vertical motion of the rotating device. A lifting device that moves up and down along the guide member;
A driving device comprising a rotating device and a driving device coupled to the elevating device for driving the rotating device.
このような構成において、回転装置は、固定円環部材と回転円環部材を含む回転連結部材により昇降装置に接続することができ、回転円環部材の一方の端部は回転するように固定円環部材と接続しており、他方の端部は回転装置と接続しており、かつ回転装置と共に回転する。 In such a configuration, the rotating device can be connected to the lifting device by a rotating connecting member including a fixed annular member and the rotating annular member, and one end of the rotating annular member is fixed to rotate. It is connected to the ring member, and the other end is connected to the rotating device and rotates together with the rotating device.
このような構成において、昇降装置は、案内部材と連結した固定部材、および可動部材を含む昇降連結部材により、案内部材に接続することができ、可動部材の一方の端部は可動な方法で固定部材と連結し、他方の端部は昇降装置と連結している。 In such a configuration, the lifting device can be connected to the guide member by a fixed member connected to the guide member and a lift connecting member including the movable member, and one end of the movable member is fixed in a movable manner. The other end is connected to the lifting device.
さらに、回転装置は回転可能でかつ垂直に移動可能な方法でシャフト部材上に形成された回転部材を備えている。 Further, the rotating device comprises a rotating member formed on the shaft member in a rotatable and vertically movable manner.
さらに、シャフト部材はボールネジで、回転部材はボールネジナットであってもよい。 Further, the shaft member may be a ball screw and the rotating member may be a ball screw nut.
さらに、回転装置は、回転部材と回転円環部材を接続する一つあるいは複数の連結部材を備えることができる。 Furthermore, the rotating device can include one or a plurality of connecting members that connect the rotating member and the rotating annular member.
さらに、昇降装置は、固定円環部材と可動部材に接続した昇降部材を備えることができる。 Further, the lifting device can include a lifting member connected to the fixed annular member and the movable member.
さらに、昇降部材は、シャフト部材と回転装置が配置されている貫通孔により形成されていてもよい。 Furthermore, the elevating member may be formed by a through hole in which the shaft member and the rotating device are arranged.
さらに、昇降装置は昇降部材に接続した昇降プレートを備えることができる。 Further, the lifting device can include a lifting plate connected to the lifting member.
さらに、昇降部材は磁性部材を備えることができる。 Further, the elevating member can include a magnetic member.
さらに、駆動装置は、回転装置に設けられ、かつ一つあるいは複数の永久磁石を備えたロータと、昇降装置に設けられ、かつ電力が供給された際に磁力によりロータを回転させるステータを備えることができる。 Further, the driving device includes a rotor provided in the rotating device and provided with one or a plurality of permanent magnets, and a stator provided in the lifting device and rotating the rotor by magnetic force when electric power is supplied. Can do.
さらに、本発明は昇降装置と連結されることにより、昇降装置の上下方向の移動距離を測定する測定装置を備えることができる。 Furthermore, this invention can be equipped with the measuring apparatus which measures the moving distance of the up-down direction of a raising / lowering apparatus by connecting with a raising / lowering apparatus.
さらに、測定装置は、基底部材から特定の間隔をおいて規定部材と連結した手動の調整ユニットと、この手動の調整ユニットと接続したエンコーダと、エンコーダに接続した昇降装置に接続したスケール部材を備えることができる。 Further, the measuring device includes a manual adjustment unit coupled to the defining member at a specific distance from the base member, an encoder connected to the manual adjustment unit, and a scale member connected to the lifting device connected to the encoder. be able to.
さらに、非動作時に、昇降装置が自重で落下するのを防げるように構成された落下装置をさらに設けることができる。 Furthermore, it is possible to further provide a dropping device configured to prevent the lifting device from falling by its own weight when not operating.
さらに、落下防止装置は、自重による昇降装置の落下を検出するための各々案内部材と昇降装置に取付けられた落下検出センサと、基底部材に形成され、かつ自重で落下した場合に、昇降装置をクランプするために落下検出センサと接続したクランプユニットを備えることができる。 Furthermore, the fall prevention device is formed on the guide member for detecting the fall of the lifting device due to its own weight, the drop detection sensor attached to the lifting device, and the base member, and when the falling device is dropped by its own weight, A clamping unit connected to the drop detection sensor can be provided for clamping.
本発明による昇降装置は、装置基部と、この装置基部に設けられた一つあるいは複数の昇降モジュールと、この昇降モジュールに含まれる昇降装置に固定された昇降チャックとを備えることができる。 The lifting device according to the present invention can include a device base, one or a plurality of lifting modules provided in the device base, and a lifting chuck fixed to the lifting device included in the lifting module.
この場合、昇降チャックは昇降装置に取付けられ、かつ磁力で固定されている。 In this case, the lifting chuck is attached to the lifting device and is fixed by a magnetic force.
さらに、昇降チャックは、昇降装置に含まれる昇降部材に固定された補助取付部材を備えることができる。 Further, the lifting chuck can include an auxiliary mounting member fixed to a lifting member included in the lifting device.
さらに、昇降部材は高さ制御突出部により形成することができ、少なくとも幾つかの高さ制御突出部が挿入される一つあるいは複数の高さ制御溝は、補助取付部材上に形成することができる。 Further, the elevating member can be formed by a height control protrusion, and one or more height control grooves into which at least some height control protrusions are inserted can be formed on the auxiliary mounting member. it can.
さらに、高さ制御突出部は球の一部である形状で昇降部材の中央最上部に形成されており、高さ制御溝は、高さ制御突出部の位置に対応する補助取付部材の底部に形成することができる。 Furthermore, the height control protrusion is formed at the center uppermost portion of the lifting member in a shape that is a part of a sphere, and the height control groove is formed at the bottom of the auxiliary mounting member corresponding to the position of the height control protrusion. Can be formed.
さらに、高さ制御溝は複数で形成することができ、高さ制御溝の少なくとも一つは、高さ制御突出部の形状に対応する形状を有しており、高さ制御溝の少なくとも一つは、高さ制御突出部が前後方向にだけ動くことができる形状を有しており、高さ制御溝の少なくとも一つは、高さ制御突出部が左右にだけ動くことができる形状を有しており、高さ制御溝の少なくとも一つは、高さ制御突出部が全方向に動くことができる形状を有している。 Furthermore, a plurality of height control grooves can be formed, and at least one of the height control grooves has a shape corresponding to the shape of the height control protrusion, and at least one of the height control grooves is formed. Has a shape in which the height control protrusion can move only in the front-rear direction, and at least one of the height control grooves has a shape in which the height control protrusion can move only to the left and right. And at least one of the height control grooves has a shape that allows the height control protrusion to move in all directions.
さらに、昇降チャックは特定の間隙でもって昇降装置上に取付けることができる。 Furthermore, the lifting chuck can be mounted on the lifting device with a specific gap.
以上記載した本発明の実施形態によれば、LCDあるいはLEDパネルなどのパネル部材は、簡単な気候で昇降することができ、昇降装置は回転装置と接続しており、かつ回転装置により駆動されており、この回転装置は、駆動装置によりシャフト部材上で回転している間、上下方向に移動することができる。 According to the embodiment of the present invention described above, the panel member such as the LCD or LED panel can be lifted and lowered in a simple climate, and the lifting device is connected to the rotating device and driven by the rotating device. The rotating device can move in the vertical direction while rotating on the shaft member by the driving device.
さらに、本発明の実施形態はパネル部材の高さを制御することができる。 Furthermore, the embodiment of the present invention can control the height of the panel member.
さらに、本発明の実施形態は高さを維持している重量のあるパネル部材を昇降させことができる。 Furthermore, the embodiment of the present invention can lift and lower a heavy panel member that maintains its height.
さらに、本発明の実施形態は重量のあるパネル部材を所望の位置まで正確に昇降させことができる。 Furthermore, the embodiment of the present invention can accurately lift and lower a heavy panel member to a desired position.
本発明の特徴を理解するのを助けるために、本発明の実施形態と関係した、昇降モジュールと昇降モジュールを使用した装置は、ここでは以下にさらに付加えた詳細において説明する。 To assist in understanding the features of the present invention, an elevator module and an apparatus using the elevator module, which are associated with embodiments of the present invention, will now be described in further detail below.
ここで以下に説明した典型的な実施形態は、本発明の技術的特性を示すために実施形態の適合性により選んであり、かつ本発明の技術的特性及び特徴を限定するのでなく、本発明の実施を例証するものである。本発明の範囲から外れずに吟味した典型的な実施形態に対して様々な変更及び追加をすることができる。従って、本発明の範囲は、それの全ての同等のものと共に、請求項の範囲に含まれるような、このような代替、変更および変形の全てを包含する。以下に記載した典型的実施形態を理解するのを助けるために、同じ付番規定を添付した図すべてに一貫して適用し、関連した構成要素/部品は、同一かあるいは範囲を拡大した図で示してある。 The exemplary embodiments described hereinbelow are chosen according to the suitability of the embodiments to illustrate the technical characteristics of the present invention and are not intended to limit the technical characteristics and features of the present invention. It illustrates the implementation of. Various changes and additions can be made to the exemplary embodiments examined without departing from the scope of the present invention. Accordingly, the scope of the invention includes all such alternatives, modifications and variations as fall within the scope of the claims, along with all equivalents thereof. To assist in understanding the exemplary embodiments described below, the same numbering convention has been applied consistently to all the accompanying figures, and the related components / parts are the same or expanded in scope. It is shown.
本発明の実施形態により、パネル部材を簡単な構造でもって直接上げ下げすること、パネル部材の水平方向の姿勢を簡単に制御すること、並びに重量のあるパネル部材の位置を正確に制御することが基本的に可能になる。 According to the embodiments of the present invention, it is fundamental to directly raise and lower the panel member with a simple structure, to easily control the horizontal posture of the panel member, and to accurately control the position of the heavy panel member. Will be possible.
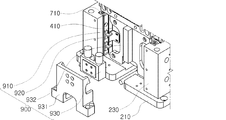
図2及び図3の実施形態に示したように、本発明による昇降モジュール(100)は、固定部品(200)、回転装置(300)、昇降装置(400)および駆動装置(500)から成っていてもよい。 As shown in the embodiment of FIGS. 2 and 3, the lifting module (100) according to the present invention includes a fixed part (200), a rotating device (300), a lifting device (400), and a driving device (500). May be.
さらに固定部品(200)は、図1〜3の実施形態に示したように、基底部材(210)を備えていてもよい。基底部材(210)は明確には限定されておらず、基礎の機能性を備えた昇降モジュール(100)を提供できる何れかのものであってもよい。 Furthermore, the fixed component (200) may include a base member (210) as shown in the embodiment of FIGS. The base member (210) is not specifically limited and may be anything that can provide a lifting module (100) with basic functionality.
図2及び図3の実施形態に示したように、基底部材(210)はシャフト部材(220)を備えることができ、さらに回転可能であり、かつ垂直方向に移動可能な方法で後で説明されるべき回転装置(300)を備えることができる。シャフト部材(220)は、実施形態のための図に示したように、シャフト支持部材(221)を使用して基底部材(210)上に形成されていてもよい。 As shown in the embodiment of FIGS. 2 and 3, the base member (210) may comprise a shaft member (220) and will be described later in a manner that is further rotatable and vertically movable. A rotating device (300) to be provided can be provided. The shaft member (220) may be formed on the base member (210) using a shaft support member (221) as shown in the figures for the embodiments.
すなわち、シャフト支持部材(221)は、図2及び図3の実施形態に示したように、ボルトなどを使用して基底部材(210)上に形成されていてもよい。加えて、シャフト部材(220)は、シャフト支持部材(221)内に挿入され、かつボルト止めあるいは類似の方法で固定されたその一方の端部を有することにより基底部材(210)上に形成されていてもよい。上記の規定にもかかわらず、基底部材(210)上にシャフト部材(220)を実現する設計は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的な公知の設計であってもよい。 That is, the shaft support member (221) may be formed on the base member (210) using a bolt or the like, as shown in the embodiment of FIGS. In addition, the shaft member (220) is formed on the base member (210) by having one end thereof inserted into the shaft support member (221) and secured by bolting or the like. It may be. Despite the above provisions, the design to realize the shaft member (220) on the base member (210) is not limited to the embodiment illustrated here, and any general known with equivalent functionality. It may be a design.
シャフト部材(220)はボールネジであってもよい。しかしシャフト部材(220)はボールネジに限定されず、後で説明されるべき回転装置(300)が、回転可能でかつ垂直方向に移動可能な方法で連結されてもよい。 The shaft member (220) may be a ball screw. However, the shaft member (220) is not limited to a ball screw, and a rotating device (300) to be described later may be connected in a rotatable and vertically movable manner.
図2及び図3の実施形態に示したように、シャフト部材(220)は、後で説明する、回転装置(300)の移動距離を限定する一つあるいは複数のストッパ部材(222)を備えていてもよい。 As shown in the embodiment of FIGS. 2 and 3, the shaft member (220) includes one or more stopper members (222) that limit the moving distance of the rotating device (300), which will be described later. May be.
図2及び図3の実施形態に示したように、シャフト部材(220)は、前述のとおりシャフト支持部材(221)に対してボルト止めされることにより、あるいは類似の方法により、シャフト部材(220)の一方の側に形成されてもよい。従って、シャフト部材(220)上での回転装置(300)の下降距離は限定されることがある。 As shown in the embodiment of FIGS. 2 and 3, the shaft member (220) is bolted to the shaft support member (221) as described above, or in a similar manner, the shaft member (220). ) May be formed on one side. Therefore, the descending distance of the rotating device (300) on the shaft member (220) may be limited.
加えて図2及び図3の実施形態に示したように、ストッパ支持部材(223)は、ボルト止めされることにより、あるいは類似の方法により、シャフト部材(220)の他方の側に設けられていてもよい。加えて前記図に示したように、他方のストッパ部材(222)は、ボルト止めか類似の方法により、ストッパ支持部材(223)に固定されており、かつシャフト部材(220)に設けられていてもよい。従って、シャフト部材(220)上での回転装置(300)の上昇距離は限定されることがある。 In addition, as shown in the embodiment of FIGS. 2 and 3, the stopper support member (223) is provided on the other side of the shaft member (220) by bolting or in a similar manner. May be. In addition, as shown in the figure, the other stopper member (222) is fixed to the stopper support member (223) by bolting or a similar method, and is provided on the shaft member (220). Also good. Accordingly, the ascent distance of the rotating device (300) on the shaft member (220) may be limited.
さらに、回転装置(300)の昇降距離は、シャフト部材(220)に両端部に設けられたストッパ部材(222)により限定されることがある。 Further, the lifting distance of the rotating device (300) may be limited by the stopper members (222) provided at both ends of the shaft member (220).
図1〜3の実施形態に示したように、基底部材(210)は、後で説明する昇降装置(400)の運動を案内する案内部材(230)を備えていてもよい。案内部材(230)は、特定の構造に限定されず、昇降装置(400)の運動を案内できる如何なる公知の装置であってもよい。 As shown in the embodiment of FIGS. 1 to 3, the base member (210) may include a guide member (230) that guides the movement of the elevating device (400) described later. The guide member (230) is not limited to a specific structure, and may be any known device that can guide the movement of the elevating device (400).
図2及び図3の実施形態に示したように、回転装置(300)は、前述のとおり固定部品(200)の基底部材(210)上に形成されたシャフト部材(220)上に形成されてもよい。この目的で、回転装置(300)は、これらの図の実施形態に示したように、回転部材(310)を備えていてもよい。 As shown in the embodiment of FIGS. 2 and 3, the rotating device (300) is formed on the shaft member (220) formed on the base member (210) of the fixed component (200) as described above. Also good. For this purpose, the rotating device (300) may comprise a rotating member (310) as shown in the embodiments of these figures.
図2及び図3の実施形態に示したように、回転部材(310)は、回転可能でかつ垂直方向に移動可能な方法でシャフト部材(220)上に形成されていてもよい。前述のとおり、シャフト部材(220)がボールネジであると、回転部材(310)はボールネジ上で回転し、かつ垂直に移動することができるボールネジナットであってもよい。しかし、回転部材(310)はボールネジに限定されず、回転可能でかつ垂直方向に移動可能な方法でシャフト部材(220)と連結できる如何なる公知の装置であってもよい。 As shown in the embodiment of FIGS. 2 and 3, the rotating member (310) may be formed on the shaft member (220) in a rotatable and vertically movable manner. As described above, when the shaft member (220) is a ball screw, the rotating member (310) may be a ball screw nut that rotates on the ball screw and can move vertically. However, the rotating member (310) is not limited to a ball screw, and may be any known device that can be connected to the shaft member (220) in a manner that is rotatable and vertically movable.
さらに図2及び図3の実施形態に示したように、回転装置(300)は一つあるいは複数の連結部材(320,330)を備えている。連結部材(320,330)は、前述した回転部材(310)と円環部材(620)に接続しており、後述する回転する連結部材(600)に含まれているこの円環部材(620)は、回転装置(300)と昇降装置(400)に接続している。 Further, as shown in the embodiment of FIGS. 2 and 3, the rotating device (300) includes one or a plurality of connecting members (320, 330). The connecting members (320, 330) are connected to the rotating member (310) and the annular member (620) described above, and the annular member (620) included in the rotating connecting member (600) described later. Are connected to the rotating device (300) and the lifting device (400).
図2及び図3の実施形態に示したように、連結部材(320,330)は、第一の連結部材(320)と第二の連結部材(330)を備えていてもよい。第一の連結部材(320)は、前述のとおり回転部材(310)に接続できる。その結果、図6及び7の示したように、第一の連結部材(320)と回転部材(310)は、後述する駆動装置(500)により駆動される、シャフト部材(220)上で回転し、かつ上下に移動できる。 As shown in the embodiment of FIGS. 2 and 3, the connecting members (320, 330) may include a first connecting member (320) and a second connecting member (330). The first connecting member (320) can be connected to the rotating member (310) as described above. As a result, as shown in FIGS. 6 and 7, the first connecting member (320) and the rotating member (310) rotate on the shaft member (220) driven by the driving device (500) described later. And move up and down.
この目的で図2及び図3の実施形態に示したように、回転可能でかつ垂直方向に移動可能な方法でシャフト部材(220)上に形成された回転部材(310)は、第一の連結部材(320)内に形成された貫通孔内に挿入され、かつボルト止めか類似の方法により第一の連結部材(320)に連結することができる。上記の規定にもかかわらず、回転部材(310)を第一の連結部材(320)と連結する構造は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる公知の設計であってもよい。 For this purpose, as shown in the embodiment of FIGS. 2 and 3, the rotating member (310) formed on the shaft member (220) in a rotatable and vertically movable manner is a first coupling. It can be inserted into a through hole formed in the member (320) and connected to the first connecting member (320) by bolting or similar methods. Notwithstanding the above, the structure for connecting the rotating member (310) to the first connecting member (320) is not limited to the embodiment illustrated here, and any known feature with equivalent functionality. It may be a design.
図2及び図3の実施形態に示したように、第二の連結部材(330)は、第一の連結部材(320)と後述する回転円環部材(620)に接続することができる。この目的で、これらの図の実施例に示したように、第二の連結部材(330)は、環状の形状であってもよい。さらに、環状の第二の連結部材(330)の内周面は、これらの図の実施形態に示したように、ボルト止めか類似の方法により第一の連結部材(320)の最上部に接続することができる。さらに、環状の連結部材(330)の外周面は、ボルト止めか類似の方法により回転円環部材(620)の最上部に接続できる。 As shown in the embodiment of FIGS. 2 and 3, the second connecting member (330) can be connected to the first connecting member (320) and a rotating annular member (620) described later. For this purpose, as shown in the examples of these figures, the second connecting member (330) may have an annular shape. Furthermore, the inner peripheral surface of the annular second coupling member (330) is connected to the top of the first coupling member (320) by bolting or similar methods as shown in the embodiments of these figures. can do. Furthermore, the outer peripheral surface of the annular connecting member (330) can be connected to the top of the rotating annular member (620) by bolting or similar methods.
上記の規定にもかかわらず、第二の連結部材(330)の形状と、第一の連結部材(320)及び円環部材(620)に接続された第二の連結部材(330)のの輪郭は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる公知の設計であってもよい。 Despite the above definition, the shape of the second connecting member (330) and the contour of the second connecting member (330) connected to the first connecting member (320) and the annular member (620). Is not limited to the embodiments illustrated herein, and may be any known design with equivalent functionality.
結果として、第一の連結部材(320)と一緒に図6及び7に示したように、第二の連結部材(330)と回転部材(310)は、後述する駆動装置(500)に駆動されるシャフト部材(220)上で回転し、かつ上下に移動できる。さらに、第二の連結部材(330)と接続された回転円環部材(620)も回転し、かつかつ上下に移動できる。結果として、これらの図に示したように、回転円環部材(620)が回転可能な方法で接続された、固定された円環部材(610)は、上下に移動することができ、固定された円環部材(610)に接続された昇降装置(400)は、上下に移動することができる。 As a result, as shown in FIGS. 6 and 7 together with the first connecting member (320), the second connecting member (330) and the rotating member (310) are driven by the driving device (500) described later. It rotates on the shaft member (220) and can move up and down. Further, the rotating ring member (620) connected to the second connecting member (330) can also rotate and move up and down. As a result, as shown in these figures, the fixed annular member (610) to which the rotating annular member (620) is connected in a rotatable manner can move up and down and be fixed. The lifting device (400) connected to the circular member (610) can move up and down.
昇降装置(400)は、前述のとおり回転装置(300)の回転運動により駆動される、前述のとおり固定部材(200)上に形成された案内部材(230)に沿って上下に移動できるように、回転装置(300)と案内部材(230)に接続することができる。 The lifting device (400) can be moved up and down along the guide member (230) formed on the fixed member (200) as described above, which is driven by the rotational motion of the rotating device (300) as described above. The rotating device (300) and the guide member (230) can be connected.
この目的で、昇降装置(400)は、図2と3の実施形態で示したとおり、昇降部材(410)を備えていてもよい。図示したように、昇降部材(410)は、後述されるべき回転連結部材(600)に含まれる固定された円環部材(610)、および案内部材(230)に昇降装置(400)を接続する、後述される昇降連結部材(700)内に含まれる可動部材(720)と接続することができる。 For this purpose, the lifting device (400) may comprise a lifting member (410) as shown in the embodiment of FIGS. As illustrated, the elevating member (410) connects the elevating device (400) to the fixed annular member (610) and the guide member (230) included in the rotation connecting member (600) to be described later. The movable member (720) included in the elevating connection member (700) described later can be connected.
図6及び7に示した通りのこのような輪郭によって、回転装置(300)が回転し、駆動装置(500)により駆動されるシャフト部材(220)に沿って上下に移動すると、昇降部材(410)は案内部材(230)に沿って上下に移動することができる。 When the rotating device (300) rotates and moves up and down along the shaft member (220) driven by the driving device (500) due to such a contour as shown in FIGS. ) Can move up and down along the guide member (230).
図2及び図3の実施形態に示したように、昇降部材(410)は貫通孔により形成されてもよい。図の実施形態に示したように、昇降部材(410)の貫通孔内には、基底部材(210)上に形成されたシャフト部材(220)と、シャフト部材(220)上で回転し、かつ上下に移動する回転装置(300)とがあってもよい。この輪郭により、昇降モジュール(100)の設計は簡素化でき、その大きさを縮小することができる。 As shown in the embodiment of FIGS. 2 and 3, the elevating member (410) may be formed by a through hole. As shown in the illustrated embodiment, in the through-hole of the elevating member (410), there is a shaft member (220) formed on the base member (210), rotating on the shaft member (220), and There may be a rotating device (300) that moves up and down. With this outline, the design of the lifting module (100) can be simplified and its size can be reduced.
さらに昇降装置(400)は、図2及び図3の実施形態に示したように、昇降部材(420)を備えていてもよい。昇降部材(420)は、図の実施形態に示したように、昇降部材(410)に接続できる。図の実施形態に示したように、昇降部材(420)は、ボルト止めか類似の方法により、昇降部材(410)に接続できる。上記の規定にもかかわらず、昇降部材(410)に昇降部材(420)を接続する設計は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的な公知の設計であってもよい。 Furthermore, the lifting device (400) may include a lifting member (420) as shown in the embodiment of FIGS. The lifting member (420) can be connected to the lifting member (410) as shown in the illustrated embodiment. As shown in the illustrated embodiment, the elevating member (420) can be connected to the elevating member (410) by bolting or similar methods. Despite the above provisions, the design for connecting the elevating member (420) to the elevating member (410) is not limited to the embodiment illustrated herein, and any commonly known design with equivalent functionality. It may be a design.
前述のようなおよび図6と7に示したようなこのような輪郭によって、昇降装置(400)の昇降部材(410)が上下に移動すると、昇降部材(420)が昇降部材(410)と一緒に上下に移動することができる。 With such a profile as described above and illustrated in FIGS. 6 and 7, when the lifting member (410) of the lifting device (400) moves up and down, the lifting member (420) is brought together with the lifting member (410). Can move up and down.
図1〜3の実施形態に示したように、昇降部材(420)は磁石部材(430)を備えていてもよい。図の実施形態に示したように、昇降部材(420)はボルト止めか類似の方法により、磁石支持部材(421)を備えていてもよい。磁石部材(430)は、磁石支持部材(421)により昇降部材(420)に取付けられている。上記の規定にもかかわらず、磁石部材(430)を昇降部材(420)に取付ける設計は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的な公知の設計であってもよい。 1-3, the raising / lowering member (420) may be provided with the magnet member (430). As shown in the illustrated embodiment, the lifting member (420) may include a magnet support member (421) by bolting or similar methods. The magnet member (430) is attached to the elevating member (420) by a magnet support member (421). Notwithstanding the above, the design for attaching the magnet member (430) to the lifting member (420) is not limited to the embodiment illustrated here, and any commonly known design with equivalent functionality. It may be.
昇降部材(420)に設けられる磁石部材(430)は、例えば永久磁石であってもよい。上記の規定にもかかわらず、昇降部材(420)の磁石部材(430)は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的な公知の設計であってもよい。
磁石部材(430)を使用して、図8及び9の実施形態に示したように、本発明による一つあるいは複数の昇降モジュール(100)を使用している昇降祖相知を提供した場合、昇降チャック(30)は磁力により昇降部材(420)に固定できる。その結果、昇降チャック(30)は、昇降部材(420)に簡単に固定できる。
The magnet member (430) provided on the elevating member (420) may be a permanent magnet, for example. In spite of the above provisions, the magnet member (430) of the lifting member (420) is not limited to the embodiment illustrated here, and can be any general known design with equivalent functionality. Also good.
When a magnet member (430) is used to provide an elevating solicitation using one or more elevating modules (100) according to the present invention as shown in the embodiment of FIGS. The chuck (30) can be fixed to the elevating member (420) by magnetic force. As a result, the lifting chuck (30) can be easily fixed to the lifting member (420).
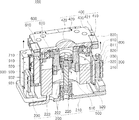
図2及び図3の実施形態に示したように、回転装置(300)は、固定円環部材(610)と回転部材(620)を含む回転連結部材(600)により昇降装置(400)に接続することができる。 As shown in the embodiment of FIGS. 2 and 3, the rotating device (300) is connected to the lifting device (400) by a rotating connecting member (600) including a fixed annular member (610) and a rotating member (620). can do.
図2及び図3の実施形態に示したように、固定円環部材(610)は環状の形状で形成できる。さらに固定円環部材(610)は、ボルト止めか類似の方法により、前述し、かつ図の実施例に示した、昇降装置(400)、さらに好ましくは昇降装置(400)の昇降部材(400)に取付けることができる。 As shown in the embodiment of FIGS. 2 and 3, the fixed annular member (610) can be formed in an annular shape. Further, the fixed ring member (610) may be lifted or lowered by bolting or similar methods as described above and shown in the illustrated embodiment, more preferably the lifting member (400) of the lifting device (400). Can be installed on.
図2及び図3の実施形態に示したように、回転円環部材(620)も環状の形状で形成できる。さらにこれらの図の実施形態に示したように、回転円環部材(620)の側面が、さらに好ましくは回転円環部材(620)の外周面が、回転可能な方法で固定円環部材(610)の内周面と接続されてもよい。例えば、回転円環部材(620)の外周面は、固定円環部材(610)の内周面に挿入され、複数のローラが回転円環部材(620)の外周面と固定円環部材(610)の内周面の間に設けられ、回転円環部材(620)の外周面は回転可能な方法で固定円環部材(610)の内側に取付けられる。 As shown in the embodiment of FIGS. 2 and 3, the rotating annular member (620) can also be formed in an annular shape. Furthermore, as shown in the embodiments of these figures, the side surface of the rotating annular member (620), more preferably the outer peripheral surface of the rotating annular member (620), can be fixed in a manner that allows rotation. ) May be connected to the inner peripheral surface. For example, the outer peripheral surface of the rotating annular member (620) is inserted into the inner peripheral surface of the fixed annular member (610), and a plurality of rollers are connected to the outer peripheral surface of the rotating annular member (620) and the fixed annular member (610). ) And the outer peripheral surface of the rotating annular member (620) is attached to the inside of the fixed annular member (610) in a rotatable manner.
図3の実施形態に示したように、回転円環部材(620)の他方の側、特に回転円環部材(620)の最上部は、回転装置(300)に接続でき、例えば図の実施形態では、回転装置(300)の第二の連結部材(330)の外周面に接続することができる。図6と7の実施形態に示したような輪郭により、回転装置(300)が回転すると、回転円環部材(620)が回転することができる。 As shown in the embodiment of FIG. 3, the other side of the rotating ring member (620), in particular the top of the rotating ring member (620), can be connected to a rotating device (300), for example the embodiment of the figure. Then, it can connect to the outer peripheral surface of the 2nd connection member (330) of a rotating apparatus (300). The contour as shown in the embodiment of FIGS. 6 and 7 allows the rotating ring member (620) to rotate when the rotating device (300) rotates.
現在の構成の回転連結部材(600)は、例えばクロスローラリングであってもよい。しかし、回転連結部材(600)の構成は、ここで例示された実施形態に限定されず、回転装置(300)を昇降装置(400)に接続できる如何なる一般的な公知の設計であってもよい。 The rotational connection member (600) of the current configuration may be, for example, a cross roller ring. However, the configuration of the rotation coupling member (600) is not limited to the embodiment illustrated here, and may be any general known design that can connect the rotation device (300) to the lifting device (400). .
図6と7に示したような、このような構成により、回転装置(300)がシャフト部材(220)上で回転し、かつ上下に移動する際に、昇降装置(400)は回転し、かつ上下に移動することができる。さらに特に、回転装置(300)が、後述する駆動装置(500)により駆動されるシャフト部材(220)上で回転し、かつ上下に移動する際に、回転装置(300)に接続された回転円環部材(620)も回転し、かつ上下に移動することができる。結果として、固定円環部材(610)は上下に移動することができ、固定円環部材(610)と接続された昇降部材(410)と、昇降部材(410)と接続された昇降板(420)も上下に移動することができる。従って、昇降装置(400)は、シャフト部材(220)上での回転装置(300)の回転運動及び上下運動により上下に移動することができる。 With such a configuration as shown in FIGS. 6 and 7, when the rotating device (300) rotates on the shaft member (220) and moves up and down, the lifting device (400) rotates, and Can move up and down. More particularly, a rotating circle connected to the rotating device (300) when the rotating device (300) rotates on a shaft member (220) driven by a driving device (500) described later and moves up and down. The ring member (620) can also rotate and move up and down. As a result, the fixed ring member (610) can move up and down, and the lift member (410) connected to the fixed ring member (610) and the lift plate (420) connected to the lift member (410). ) Can also move up and down. Therefore, the lifting device (400) can be moved up and down by the rotational motion and vertical motion of the rotating device (300) on the shaft member (220).
さらに図2及び図3の実施形態に示したように、昇降装置(400)は、可動部材(720)を含む昇降連結部材(700)により、固定部材(710)及び案内部材(230)に接続することができる。 Further, as shown in the embodiment of FIGS. 2 and 3, the elevating device (400) is connected to the fixed member (710) and the guide member (230) by the elevating connection member (700) including the movable member (720). can do.
図2及び図3の実施形態に示したように、固定部材(710)は案内部材(230)に接続することができる。これらの図の実施形態に示したように、固定部材(710)は、ボルト止めか類似の方法によりそして案内部材(230)に接続することができる。従ってこれらの図の実施形態に示したように、可動部材(720)の一方の端部は、可動な方法で固定部材(710)に接続することができる。例えば、可動部材(720)の一方の側は、滑り運動を可能にする方法で固定部材(710)に挿入することができ、複数のローラあるいはボールは、可動部材(720)の一方の側と固定部材(710)の間に設けられており、従って可動部材(720)の一方の側は、可動な方法で固定部材(710)に接続することができる。 As shown in the embodiment of FIGS. 2 and 3, the fixing member (710) can be connected to the guide member (230). As shown in the illustrated embodiments, the securing member (710) can be connected to the guide member (230) by bolting or similar methods. Thus, as shown in the embodiments of these figures, one end of the movable member (720) can be connected to the fixed member (710) in a movable manner. For example, one side of the movable member (720) can be inserted into the stationary member (710) in a manner that allows sliding motion, and a plurality of rollers or balls can be connected to one side of the movable member (720). It is provided between the fixed members (710) and thus one side of the movable member (720) can be connected to the fixed member (710) in a movable manner.
可動部材(720)の他方の側は、昇降装置(400)に、例えば図2及び図3の実施形態に示したように、ボルト止めか類似の方法により、昇降装置(400)の昇降部材(410)に接続することができる。 The other side of the movable member (720) is connected to the lifting device (400) by, for example, bolting or a similar method as shown in the embodiment of FIGS. 410).
本構成の昇降連結部材(700)は、例えばクロスローラ案内部あるいはクロスボール案内部であってもよい。しかし、昇降連結部材(700)の構成は、ここで例示された実施形態に限定されず、昇降装置(400)を案内部材(230)に接続できる如何なる一般的な公知の設計であってもよい。 The elevating connection member (700) of this configuration may be, for example, a cross roller guide part or a cross ball guide part. However, the configuration of the lifting connection member (700) is not limited to the embodiment illustrated here, and may be any generally known design that can connect the lifting device (400) to the guide member (230). .
図6及び7に示したように、上記のような昇降連結部材(700)のこのような構成により、昇降装置(400)がシャフト部材(220)上で回転装置(300)の回転により上下に移動すると、昇降装置(400)は案内部材(230)上で上下に移動することができる。昇降装置(400)、特に昇降装置(400)の昇降部材(410)が上下に移動すると、昇降部材(410)に接続された可動部材(720)は固定部材(710)に沿って上下に移動することができる。従って、昇降部材(410)は、移動の垂直軸線から逸れることなく上下に移動することができる。 As shown in FIGS. 6 and 7, due to the above-described configuration of the lifting connection member (700), the lifting device (400) is moved up and down by the rotation of the rotating device (300) on the shaft member (220). When moved, the lifting device (400) can move up and down on the guide member (230). When the lifting device (400), in particular, the lifting member (410) of the lifting device (400) moves up and down, the movable member (720) connected to the lifting member (410) moves up and down along the fixed member (710). can do. Therefore, the elevating member (410) can move up and down without deviating from the vertical axis of movement.
駆動装置(500)は、回転させるための回転装置(300)を駆動するために、回転装置(300)と昇降装置(400)に連結することができる。この目的で、駆動装置(500)は、図2及び図3の実施形態に示したように、ロータ(510)とステータ(520)を備えていてもよい。 The driving device (500) can be connected to the rotating device (300) and the lifting device (400) to drive the rotating device (300) for rotation. For this purpose, the driving device (500) may include a rotor (510) and a stator (520) as shown in the embodiment of FIGS.
ロータ(510)は回転装置(300)に、図3に示した実施形態では回転装置(300)の第一の連結部材(320)に設けることができる。この図の実施形態に示した通り、ロータ(510)は環状の形状であり、かつ第一の連結部材(320)の底部に挿入されることにより第一の連結部材(320)に設けられている。上記の規定にもかかわらず、第一の連結部材(320)と連結している形状ならびに構造は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的な公知の形状および構造であってもよい。 The rotor (510) can be provided in the rotating device (300), and in the embodiment shown in FIG. 3, the first connecting member (320) of the rotating device (300) can be provided. As shown in the embodiment of this figure, the rotor (510) has an annular shape, and is provided in the first connecting member (320) by being inserted into the bottom of the first connecting member (320). Yes. Despite the above provisions, the shape and structure connected to the first connecting member (320) is not limited to the embodiment illustrated here, and any general known with equivalent functionality. The shape and structure may be used.
ロータ(510)は一つあるいは複数の永久磁石を備えていてもよい。ロータ(510)と共に構成された永久磁石は磁力を発生することができる。 The rotor (510) may comprise one or more permanent magnets. A permanent magnet configured with the rotor (510) can generate a magnetic force.
ステータ(520)は、図2及び図3の実施形態に示したように、昇降装置(400)共に構成されている。図の実施形態に示した通り、ステータ(520)は昇降部材(410)の貫通孔に挿入されることにより昇降装置(400)の昇降部材(410)に設けることができる。上記の規定にもかかわらず、昇降装置(400)上にステータ(520)を実装する設計は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的に公知の設計であってもよい。 As shown in the embodiment of FIGS. 2 and 3, the stator (520) is configured together with the lifting device (400). As shown in the illustrated embodiment, the stator (520) can be provided in the elevating member (410) of the elevating device (400) by being inserted into the through hole of the elevating member (410). Despite the above provisions, the design for mounting the stator (520) on the lifting device (400) is not limited to the embodiment illustrated here, and any commonly known design with equivalent functionality. It may be a design.
さらに、ステータ(520)は電力で利用される場合にロータ(510)を回転させるように構成することができる。ステータ(520)は、例えばコイルを備えていてもよい。従ってステータ(520)が利用される場合に、電流はコイルを流れて磁力を発生する。ロータ(510)は、ロータ(510)内の永久磁石の磁力とステータ(520)内で発生する磁力の相互作用によって回転することができる。 Further, the stator (520) can be configured to rotate the rotor (510) when used with electrical power. The stator (520) may include a coil, for example. Thus, when the stator (520) is utilized, current flows through the coil and generates magnetic force. The rotor (510) can be rotated by the interaction of the magnetic force of the permanent magnet in the rotor (510) and the magnetic force generated in the stator (520).
駆動装置(500)のこのような構成は、トルクモータの構成であってもよい。トルクモータは速度に対して逆の比率で高トルクを発生する。従って、昇降モジュールと昇降装置よりも重いプレート部材を動かす一つの昇降モジュールと昇降装置は、従来のステップピングモータあるいはサーボモータを使用して複数の昇降モジュールと昇降装置により動かすことができる。 Such a configuration of the driving device (500) may be a configuration of a torque motor. Torque motors generate high torque at a rate that is inverse to speed. Therefore, one lifting module and lifting device that moves a plate member heavier than the lifting module and lifting device can be moved by a plurality of lifting modules and lifting devices using a conventional stepping motor or servo motor.
前述のように、直接の垂直運動は、ある程度簡単な構造で実現でき、この構造において、昇降装置(400)は、シャフト部材(220)上で駆動装置(500)により直接回転しかつ上下に移動する回転装置(300)に接続している。 As described above, direct vertical movement can be realized with a somewhat simple structure, in which the lifting device (400) is directly rotated by the driving device (500) on the shaft member (220) and moved up and down. Connected to the rotating device (300).
本発明による昇降モジュール及び装置は、直接上下に移動することができるので、エネルギー効率は、高トルクを発生するトルクモータを使用することにより重いプレート部材を扱うことができる。 Since the elevating module and apparatus according to the present invention can move directly up and down, energy efficiency can handle heavy plate members by using a torque motor that generates high torque.
結果として、本発明による昇降モジュール及び装置は、重いプレート部材を所望の位置まで正確に昇降させることができる。 As a result, the lifting module and apparatus according to the present invention can accurately lift and lower a heavy plate member to a desired position.
さらに本発明による昇降モジュール(100)は、図2及び3に示したように測定装置(800)を備えていてもよい。測定装置(800)は昇降装置(400)の移動距離を測定できる。この目的で測定装置(800)は、図4aおよび4bの実施形態に示したように手動調整ユニット(810)、エンコーダ(820)及びスケール部材(830)を備えていてもよい。 Further, the lifting module (100) according to the present invention may include a measuring device (800) as shown in FIGS. The measuring device (800) can measure the moving distance of the lifting device (400). For this purpose, the measuring device (800) may comprise a manual adjustment unit (810), an encoder (820) and a scale member (830) as shown in the embodiment of FIGS. 4a and 4b.
手動調整ユニット(810)は、図4aおよび4bの実施形態に示したように、基底部材(210)から一定の間隔をおいて基底部材(210)に接続することができる。この目的で手動調整ユニット(810)は、図示した実施形態に示したように、ボルト止めか類似の方法により、基底部材(210)に接続された調整ユニット支持部材(811)に接続することができる。 The manual adjustment unit (810) can be connected to the base member (210) at a fixed distance from the base member (210), as shown in the embodiment of FIGS. 4a and 4b. For this purpose, the manual adjustment unit (810) can be connected to the adjustment unit support member (811) connected to the base member (210) by bolting or similar methods as shown in the illustrated embodiment. it can.
手動調整ユニット(810)は、後述されるエンコーダ(820)の高さの手動調整を可能にするように構成することができる。手動調整ユニット(810)の構成は、特定の設計に限定されず、エンコーダ(820)の高さの手動調整を可能にする如何なる公知の設計であってもよい。 The manual adjustment unit (810) can be configured to allow manual adjustment of the height of the encoder (820) described below. The configuration of the manual adjustment unit (810) is not limited to a particular design and may be any known design that allows manual adjustment of the height of the encoder (820).
エンコーダ(820)は、図4aおよび4bの実施形態に示したように、手動調整ユニット(810)に接続することができる。昇降装置(400)の移動距離は、エンコーダ(820)と後述するスケール部材(830)により測定することができる。エンコーダ(820)の構成は、特定の設計に限定されず、昇降装置(400)の移動距離を測定できる如何なる公知の設計であってもよい。 The encoder (820) can be connected to a manual adjustment unit (810) as shown in the embodiment of FIGS. 4a and 4b. The moving distance of the lifting device (400) can be measured by an encoder (820) and a scale member (830) described later. The configuration of the encoder (820) is not limited to a specific design, and may be any known design that can measure the moving distance of the lifting device (400).
スケール部材(830)は、図4aおよび4bに示したように、昇降装置(400)に接続することができ、かつエンコーダ(820)に連結することができる。図の実施形態に示した通り、昇降装置(400)の昇降部材(410)に接続することができる。図の実施形態に示した通り、スケール部材(830)は、ボルト止めか類似の方法により、昇降部材(410)に接続することができる。上記の規定にもかかわらず、スケール部材(830)と昇降部材(410)の間の接続の設計は、ここで例示された実施形態に限定されず、同等な機能性を備えた如何なる一般的に公知の設計であってもよい。
さらにスケール部材(830)は、前述したエンコーダ(820)により読み取ることができる目盛を備えることができる。例えば、目盛はマイクロメータユニットに付すことができる。このようにして、昇降装置(400)の移動距離は測定でき、かつマイクロメータスケールで制御できる。従って正確な運動制御を行うことができる。
The scale member (830) can be connected to the lifting device (400) and coupled to the encoder (820) as shown in FIGS. 4a and 4b. As shown in the illustrated embodiment, it can be connected to the lifting member (410) of the lifting device (400). As shown in the illustrated embodiment, the scale member (830) can be connected to the lifting member (410) by bolting or similar methods. Despite the above provisions, the design of the connection between the scale member (830) and the lifting member (410) is not limited to the embodiment illustrated here, but any generally with equivalent functionality. A known design may be used.
Furthermore, the scale member (830) can be provided with a scale that can be read by the encoder (820) described above. For example, a scale can be attached to the micrometer unit. In this way, the travel distance of the lifting device (400) can be measured and controlled on a micrometer scale. Therefore, accurate motion control can be performed.
スケール部材(830)の構成は、特定の設計に限定されず、前述のエンコーダ(820)と連結することにより、昇降装置(400)の移動距離を測定できる如何なる公知の設計であってもよい。 The configuration of the scale member (830) is not limited to a specific design, and may be any known design that can measure the moving distance of the lifting device (400) by connecting to the encoder (820) described above.
この構成により、図6及び7に示したように、昇降部材(410)が上下に移動すると
スケール部材(830)は、昇降装置(400)の昇降部材(410)と一緒に上あるいは下に移動できる。エンコーダ(820)は、スケール部材(830)の移動距離を測定し、かつ昇降装置(400)の昇降部材(410)の移動距離を決定することができる。例えばエンコーダ(820)は、スケール部材(830)の目盛を読むことにより、昇降装置(400)の昇降部材(410)の移動距離を測定できる。
With this configuration, as shown in FIGS. 6 and 7, when the elevating member (410) moves up and down, the scale member (830) moves up or down together with the elevating member (410) of the elevating device (400). it can. The encoder (820) can measure the moving distance of the scale member (830) and determine the moving distance of the lifting member (410) of the lifting device (400). For example, the encoder (820) can measure the moving distance of the lifting member (410) of the lifting device (400) by reading the scale of the scale member (830).
さらに、図8及び9の実施形態に示したように、本発明により一つあるいは複数の昇降モジュール(100)を使用して、昇降装置(10)を構成した場合、昇降チャック(30)の高さは、昇降モジュール(100)の昇降部材(410)の垂直運動により制御することができる。さらに、エンコーダ(820)の高さは、昇降モジュール(100)の昇降部材(410)の位置がスケール部材(830)のゼロ位置になるように、手動の調整ユニット(810)により調整できる。結果として、昇降チャック(30)の高さは、特別な調整をすることなく、昇降モジュール(100)の昇降部材(420)上に昇降チャック(30)を取付けることにより実現できる。 Further, as shown in the embodiment of FIGS. 8 and 9, when the lifting device (10) is configured using one or a plurality of lifting modules (100) according to the present invention, the height of the lifting chuck (30) is increased. The height can be controlled by the vertical movement of the elevating member (410) of the elevating module (100). Further, the height of the encoder (820) can be adjusted by a manual adjustment unit (810) such that the position of the elevating member (410) of the elevating module (100) is the zero position of the scale member (830). As a result, the height of the lifting chuck (30) can be realized by mounting the lifting chuck (30) on the lifting member (420) of the lifting module (100) without any special adjustment.
さらに本発明による昇降モジュール(100)は、図5a及び5bの実施形態に示したような落下防止装置(900)を備えていてもよい。落下防止装置(900)は、先に述べた駆動装置(500)が機能しない場合に、例えばステータ(520)への電力供給ができない場合に、昇降装置(400)がその自重により落下するのを防止するように構成することができる。この目的で、落下防止装置(900)は、図5a及び5bの実施形態に示したように、落下検出センサ(910,920)とクランプユニット(930)を備えていてもよい。 Furthermore, the lifting module (100) according to the present invention may comprise a fall prevention device (900) as shown in the embodiment of FIGS. 5a and 5b. The fall prevention device (900) prevents the elevating device (400) from dropping due to its own weight when the drive device (500) described above does not function, for example, when power cannot be supplied to the stator (520). It can be configured to prevent. For this purpose, the fall prevention device (900) may comprise a fall detection sensor (910, 920) and a clamp unit (930) as shown in the embodiment of FIGS. 5a and 5b.
落下検出センサ(910,920)は、図5a及び5bの実施形態に示したように、各々案内部材(230)と昇降装置(400)に取付けることができる。すなわち、一方の落下検出センサ(910)は案内部材(230)に取付けることができる。図の実施形態に示したように、落下検出センサ(910)は案内部材(230)に接続された固定部材(710)に取付けることができる。 The fall detection sensors (910, 920) can be attached to the guide member (230) and the lifting device (400), respectively, as shown in the embodiment of FIGS. 5a and 5b. That is, one fall detection sensor (910) can be attached to the guide member (230). As shown in the illustrated embodiment, the fall detection sensor (910) can be attached to a fixed member (710) connected to the guide member (230).
さらに落下検出センサ(910)は、昇降装置(400)に取付けることができる。他方の落下検出センサ(920)は、図5a及び5bの実施形態に示したように、昇降装置(400)の昇降部材(410)に取付けることができる。先に述べたように、昇降装置(400)が駆動装置(500)の故障のために、自重により落下した場合に、落下検出センサ(910,920)がそれを検出する。 Further, the fall detection sensor (910) can be attached to the lifting device (400). The other drop detection sensor (920) can be attached to the lifting member (410) of the lifting device (400) as shown in the embodiment of FIGS. 5a and 5b. As described above, when the elevating device (400) falls due to its own weight due to a failure of the drive device (500), the fall detection sensors (910, 920) detect it.
例えば、落下検出センサ(910,920)は、昇降装置(400)の移動速度を検出するように構成することができる。従って、昇降装置(400)が駆動装置(500)により駆動された時の速度よりも速い速度で降下すると、落下検出センサ(910,920)はそれを検出する。その結果として、昇降装置(400)の自重による故障は検出できることになる。 For example, the fall detection sensors (910, 920) can be configured to detect the moving speed of the lifting device (400). Therefore, when the elevating device (400) descends at a speed faster than the speed when it is driven by the driving device (500), the fall detection sensors (910, 920) detect it. As a result, a failure due to the weight of the lifting device (400) can be detected.
しかし、昇降装置(400)の自重による故障を検出する落下検出センサ(910,920)の構成は、ここで例示された実施形態に限定されず、昇降装置(400)の自重による故障を検出できる如何なる公知の設計であってもよい。 However, the configuration of the drop detection sensor (910, 920) that detects a failure due to the weight of the lifting device (400) is not limited to the embodiment illustrated here, and a failure due to the weight of the lifting device (400) can be detected. Any known design may be used.
クランプユニット(930)は、図5a及び5bの実施形態に示したように、基底部材(210)上に形成できる。図示したように、クランプユニット(930)はユニット支持部材(931)に接続でき、かつ基底部材(210)上に形成できる。さらに、クランプユニット(930)は図の実施形態に示したように、前述の落下検出センサ(910,920)に接続することができる。 The clamping unit (930) can be formed on the base member (210) as shown in the embodiment of FIGS. 5a and 5b. As shown, the clamp unit (930) can be connected to the unit support member (931) and formed on the base member (210). Further, the clamp unit (930) can be connected to the above-described drop detection sensors (910, 920) as shown in the illustrated embodiment.
このように、クランプユニット(930)は、落下検出センサ(910,920)が先に述べたように昇降装置(400)の故障を検出した場合に、自重で落下する昇降装置(400)をクランプするように構成することができる。 In this way, the clamp unit (930) clamps the lifting device (400) that falls by its own weight when the drop detection sensor (910, 920) detects a failure of the lifting device (400) as described above. Can be configured to.
この理由で、昇降装置(400)、さらに特に昇降装置(400)の昇降部材(410)は、図5a及び5bの実施形態に示したように、ボルト止めか類似の方法により、クランプ部材(932)を備えることができる。自重による昇降装置(400)の落下が、落下検出センサ(910,920)により検出されると、クランプユニット(930)は、昇降部材(410)のクランプ部材(932)をクランプすることができる。従って、昇降装置(400)は駆動装置(500)の故障があっても自重による落下から守ることができる。 For this reason, the lifting device (400), and more particularly the lifting member (410) of the lifting device (400), can be clamped (932) by bolting or similar methods, as shown in the embodiment of FIGS. 5a and 5b. ). When the fall of the lifting device (400) due to its own weight is detected by the drop detection sensors (910, 920), the clamp unit (930) can clamp the clamp member (932) of the lifting member (410). Therefore, the lifting device (400) can be protected from dropping due to its own weight even if the driving device (500) is broken.
クランプ部材(932)をクランプするために、クランプユニット(930)は、例えば、圧縮空気が供給された場合にクランプ部材(932)を解除し、圧縮空気が供給されない場合はクランプ部材(932)をクランプするように構成することができる。しかし、クランプユニット(930)の構成は、ここで例示された実施形態に限定されず、落下検出センサ(910,920)を使用して自重による昇降装置(400)の落下を検出し、かつ昇降装置(400)の落下を停止させるためにクランプ部材(932)をクランプすることができる如何なる公知の設計であってもよい。 In order to clamp the clamp member (932), the clamp unit (930), for example, releases the clamp member (932) when compressed air is supplied and releases the clamp member (932) when compressed air is not supplied. It can be configured to clamp. However, the configuration of the clamp unit (930) is not limited to the embodiment exemplified here, and the fall detection sensor (910, 920) is used to detect the fall of the lifting device (400) due to its own weight, and the lifting and lowering is performed. Any known design that can clamp the clamp member (932) to stop the fall of the device (400) may be used.
本発明による昇降装置(10)は、図8及び9に示したように、装置基部(20)、一つあるいは複数の昇降モジュール(100)および昇降チャック」(30)を備えることができる。 The lifting device (10) according to the present invention may comprise a device base (20), one or more lifting modules (100) and a lifting chuck "(30) as shown in FIGS.
図8及び9に示したように、装置基部(20)は装置の基部を形成することができる。これらの図の実施形態に示したように、装置基部(20)はパネルであり、かつ本発明による昇降装置(10)が使用される場所に設けられてもよい。装置基部(20)の形状と構成は、特定の形状および/または構成に限定されず、装置のための基部を提供でき、かつ本発明による昇降装置(10)が使用される場所に位置決めできる如何なる公知の形状および/または構成であってもよい。 As shown in FIGS. 8 and 9, the device base (20) can form the base of the device. As shown in the embodiments of these figures, the device base (20) is a panel and may be provided where the lifting device (10) according to the present invention is used. The shape and configuration of the device base (20) is not limited to a particular shape and / or configuration, but can provide any base for the device and can be positioned where the lifting device (10) according to the present invention is used. It may be a known shape and / or configuration.
図の実施形態に示したように、昇降モジュール(100)を装置基部(20)の上に形成することができる。図の実施形態に示したように、四つの昇降モジュール(100)を装置基部(20)の上に形成することができる。さらに、四つの昇降モジュール(100)を装置基部(20)の上に対称に配置することもできる。 As shown in the illustrated embodiment, the lift module (100) can be formed on the device base (20). As shown in the illustrated embodiment, four lifting modules (100) can be formed on the device base (20). Furthermore, the four lifting modules (100) can also be arranged symmetrically on the device base (20).
四つの昇降モジュール(100)を装置基部(20)の上に対称に配置することにより、昇降モジュール(100)、特に水平位置での昇降装置(400)の昇降部材(420)に含まれる昇降装置(400)の最上部に後述される昇降チャック(30)を取付けることが容易になる。言い換えれば、昇降モジュール(100)の昇降装置(400)および固定して置かれるLCDパネルあるいはLEDパネルなどのパネル部材を動かす昇降チャック(30)の高さは容易に制御できる。 Elevating device included in elevating module (100), particularly elevating member (420) of elevating device (400) in a horizontal position by arranging four elevating modules (100) symmetrically on device base (20) It becomes easy to attach an elevating chuck (30), which will be described later, to the top of (400). In other words, the height of the lifting / lowering device (400) of the lifting / lowering module (100) and the height of the lifting / lowering chuck (30) for moving a panel member such as an LCD panel or LED panel that is fixedly placed can be easily controlled.
しかし、昇降モジュール(100)の数量と装置基部(20)上での昇降モジュールの配設は、図の実施形態に示したように、対称に配置された四つの昇降モジュール(100)に限定されるものではなく、水平姿勢で昇降モジュール(100)の昇降装置(400)の最上部に昇降チャック(30)を取付け、かつ昇降チャック(30)の高さを容易に制御することができる、一つでもあるいは複数でも、いかなる数量であってもよく、かついかなる配列方式であってもよい。 However, the number of the lifting modules (100) and the arrangement of the lifting modules on the apparatus base (20) are limited to four lifting modules (100) arranged symmetrically as shown in the embodiment of the figure. The lifting chuck (30) is attached to the top of the lifting device (400) of the lifting module (100) in a horizontal posture, and the height of the lifting chuck (30) can be easily controlled. One or a plurality, any quantity, and any arrangement method may be used.
図8および9の実施形態に示したように、昇降モジュール(100)は、ボルト止めあるいは類似の方法により装置基部(20)上に置くことができる。すなわち、昇降モジュール(100)の基底部材(210)は、昇降モジュール(100)が装置基部(20)上に形成できるように、ボルト止めあるいは類似の方法により装置基部(20)と連結することができる。 As shown in the embodiment of FIGS. 8 and 9, the lifting module (100) can be placed on the device base (20) by bolting or similar methods. That is, the base member (210) of the lifting module (100) can be coupled to the device base (20) by bolting or similar methods so that the lifting module (100) can be formed on the device base (20). it can.
図8および9の実施形態に示したように、昇降チャック(30)は昇降装置(400)の最上部に、特に昇降装置(400)の昇降部材(420)上に固定することができる。この目的で、昇降チャック(30)は磁力により昇降装置(400)の最上部に固定できる。 As shown in the embodiment of FIGS. 8 and 9, the lifting chuck (30) can be secured to the top of the lifting device (400), particularly on the lifting member (420) of the lifting device (400). For this purpose, the lifting chuck (30) can be fixed to the top of the lifting device (400) by magnetic force.
すなわち前述のように、昇降部材(420)は、その磁力が昇降チャック(30)を昇降部材(420)にくっつけることができる磁性部材(430)を備えることができる。結果として、昇降チャック(30)は昇降部材(420)に容易に取付けることができる。 That is, as described above, the elevating member (420) can include the magnetic member (430) whose magnetic force can attach the elevating chuck (30) to the elevating member (420). As a result, the lifting chuck (30) can be easily attached to the lifting member (420).
図9の実施形態に示したように、昇降チャック(30)は補助取付部材(31)を備えていてもよい。図の実施形態に示したように、補助取付部材(31)はボルト止めあるいは類似の方法により昇降チャック(30)に固定することができる。補助取付部材(31)は例えば磁力により、昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)に固定することができる。 As shown in the embodiment of FIG. 9, the lifting chuck (30) may include an auxiliary mounting member (31). As shown in the illustrated embodiment, the auxiliary mounting member (31) can be secured to the lift chuck (30) by bolting or similar methods. The auxiliary attachment member (31) can be fixed to the elevating member (420) of the elevating device (400) included in the elevating module (100), for example, by magnetic force.
すなわち前述のように、補助取付部材(31)は磁性支持部材(421)により支持された磁性部材(430)により供給される磁力により、昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)に固定することができる。
補助取付部材(31)の形状は、昇降装置(400)の昇降部材(420)の形状に相当する。しかし、補助取付部材(31)の形状は、図示した実施形態に限定されず、昇降モジュール(100)に容易に含まれる昇降装置(400)の昇降部材(420)に固定することができる如何なる形状であってもよい。
補助取付部材(31)が昇降チャック(30)に設けられ、かつ昇降チャック(30)が昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)に固定された場合に、昇降チャック(30)の材料がすべて磁性体ではないかもしれない。すなわち、補助取付部材(31)だけが磁性体であったとしても、昇降チャック(30)は、昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)に固定できる。
That is, as described above, the auxiliary mounting member (31) is lifted and lowered by the lifting device (400) included in the lifting module (100) by the magnetic force supplied by the magnetic member (430) supported by the magnetic support member (421). It can be fixed to the member (420).
The shape of the auxiliary mounting member (31) corresponds to the shape of the lifting member (420) of the lifting device (400). However, the shape of the auxiliary mounting member (31) is not limited to the illustrated embodiment, and any shape that can be fixed to the lifting member (420) of the lifting device (400) easily included in the lifting module (100). It may be.
When the auxiliary mounting member (31) is provided in the lifting chuck (30) and the lifting chuck (30) is fixed to the lifting member (420) of the lifting device (400) included in the lifting module (100) The material of the chuck (30) may not be all magnetic. That is, even if only the auxiliary mounting member (31) is a magnetic body, the lifting chuck (30) can be fixed to the lifting member (420) of the lifting device (400) included in the lifting module (100).
前述したように、装置基部(20)上に形成された昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)に固定された昇降チャック(30)により、昇降モジュール(100)の昇降装置(400)は、昇降チャック(30)の高さまで適切に昇降することができる。さらに前述したように、昇降モジュール(100)の測定装置(800)の手動調整ユニット(810)は、スケール部材(830)のゼロ点に位置決めされるべきエンコーダ(820)を調整する。 As described above, the elevating module (100) is provided by the elevating chuck (30) fixed to the elevating member (420) of the elevating device (400) included in the elevating module (100) formed on the apparatus base (20). The lifting / lowering device (400) can be lifted / lowered appropriately to the height of the lifting / lowering chuck (30). As further described above, the manual adjustment unit (810) of the measuring device (800) of the lift module (100) adjusts the encoder (820) to be positioned at the zero point of the scale member (830).
この状態で、LCDあるいはLEDなどのパネル部材は、昇降チャック(30)に取付けられるか、あるいは固定されている。さらに昇降チャック(30)は、昇降モジュール(100)の駆動装置(500)を使用して、同じ距離だけ昇降モジュール(100)の昇降装置(400)により水平姿勢で上下に移動することができる。結果として、昇降チャック(30)に取付けられるかあるいは固定される、LCDパネルあるいはLEDパネルなどのパネル部材は、例えば表面検査のために所望の位置まで持上げることができる。 In this state, a panel member such as an LCD or LED is attached to or fixed to the lifting chuck (30). Further, the lifting chuck (30) can be moved up and down in a horizontal posture by the lifting device (400) of the lifting module (100) by the same distance using the driving device (500) of the lifting module (100). As a result, a panel member, such as an LCD panel or LED panel, that is attached or secured to the lift chuck (30) can be lifted to a desired position, for example, for surface inspection.
他方、昇降モジュール(100)の昇降装置(400)の昇降部材(420)は、図1及び3の実施形態に示したように、高さ制御突出部(422)により形成することができる。図の実施形態に示したように、高さ制御突出部(422)は、昇降部材(420)の最上面の中央に形成することができる。さらにそれらの形状は、図の実施形態に示したように球体の一部であってもよい。 On the other hand, the elevating member (420) of the elevating device (400) of the elevating module (100) can be formed by a height control protrusion (422) as shown in the embodiment of FIGS. As shown in the illustrated embodiment, the height control protrusion (422) may be formed at the center of the uppermost surface of the elevating member (420). Further, the shape may be a part of a sphere as shown in the illustrated embodiment.
さらに図11の実施形態に示したように、補助取付部材(31)は一つあるいは複数の高さ制御溝(31a)により形成することができ、これらの溝内に、図12の実施形態に示したように、少なくとも幾つかの高さ制御突出部(422)が挿入されている。図の実施形態に示したように、高さ制御溝(31a)は、高さ制御突出部(422)の位置に対応する補助取付部材(31)の底面に形成することができる。 Further, as shown in the embodiment of FIG. 11, the auxiliary mounting member (31) can be formed by one or a plurality of height control grooves (31a), and in these grooves, the embodiment of FIG. As shown, at least some height control protrusions (422) have been inserted. As shown in the illustrated embodiment, the height control groove (31a) can be formed on the bottom surface of the auxiliary mounting member (31) corresponding to the position of the height control protrusion (422).
この構成により、昇降チャック(30)は昇降部材(420)の最上部に容易に固定することができる。すなわち、昇降チャック(30)は、昇降モジュール(100)に含まれる昇降装置(400)の昇降部材(420)上に形成された少なくとも幾つかの高さ制御突出部(422)を、昇降チャック(30)の補助取付部材(31)上に形成された高さ制御溝(31a)内に挿入することにより容易に昇降部材(420)の最上部に固定できる。 With this configuration, the lifting chuck (30) can be easily fixed to the top of the lifting member (420). That is, the elevating chuck (30) includes at least some height control protrusions (422) formed on the elevating member (420) of the elevating device (400) included in the elevating module (100). It can be easily fixed to the uppermost part of the elevating member (420) by being inserted into the height control groove (31a) formed on the auxiliary mounting member (31) of 30).
図11の実施形態に示したように、高さ制御溝(31a)は、補助取付部材(31)の底面に複数形成することができる。さらに図の実施形態に示したように、少なくとも一つの高さ制御溝(31a)は、高さ制御突出部(422)に対応する形状を有することができる。すなわち、これらの溝の形状は、図の実施形態に示したように、球形凹部の一部であってもよい。 As shown in the embodiment of FIG. 11, a plurality of height control grooves (31a) can be formed on the bottom surface of the auxiliary mounting member (31). Further, as shown in the illustrated embodiment, the at least one height control groove (31a) may have a shape corresponding to the height control protrusion (422). That is, the shape of these grooves may be a part of a spherical recess as shown in the illustrated embodiment.
さらに図11の実施形態に示したように、高さ制御溝(31a)の少なくとも一つは、高さ制御突出部(422)が前後方向にだけ動ける形状を有することができる。さらに高さ制御溝(31a)の少なくとも一つは、高さ制御突出部(422)が左右方向にだけ動ける形状を有することができる。この目的で、高さ制御溝(31a)の形状は四角錐であってもよい。 Furthermore, as shown in the embodiment of FIG. 11, at least one of the height control grooves (31a) may have a shape that allows the height control protrusion (422) to move only in the front-rear direction. Furthermore, at least one of the height control grooves (31a) may have a shape that allows the height control protrusion (422) to move only in the left-right direction. For this purpose, the shape of the height control groove (31a) may be a quadrangular pyramid.
さらに高さ制御溝(31a)の少なくとも一つは、高さ制御突出部(422)が全方向に動ける形状を有することができる。この目的で、高さ制御溝(31a)の形状は、図の実施形態に示したように円柱溝であってもよい。 Furthermore, at least one of the height control grooves (31a) may have a shape that allows the height control protrusion (422) to move in all directions. For this purpose, the shape of the height control groove (31a) may be a cylindrical groove as shown in the illustrated embodiment.
前述のようにこの構成により、昇降モジュール(100)の昇降装置(400)を移動させることにより、昇降チャック(30)の高さを制御する際に、昇降チャック(30)は自由に移動することができる。例えば、高さ制御突出部(422)の形状に対応する形状を有する高さ制御溝(31a)に挿入される高さ制御突出部(422)に対して、昇降チャック(30)の高さを制御する際に、昇降チャック(30)は自由に移動することができる。 As described above, by this configuration, the lifting chuck (30) is freely moved when the height of the lifting chuck (30) is controlled by moving the lifting device (400) of the lifting module (100). Can do. For example, the height of the lifting chuck (30) is set to the height control protrusion (422) inserted into the height control groove (31a) having a shape corresponding to the shape of the height control protrusion (422). When controlling, the lifting chuck (30) can move freely.
前述のようにこの構成により、昇降チャック(30)、あるいは昇降チャック(30)の補助取付部材(31)が、昇降装置(400)に含まれる昇降部材(420)の磁性部材(430)により供給される磁力により昇降部材(420)に固定されても、昇降チャック(30)の高さは容易に制御することができる。 As described above, with this configuration, the lifting chuck (30) or the auxiliary attachment member (31) of the lifting chuck (30) is supplied by the magnetic member (430) of the lifting member (420) included in the lifting device (400). Even if it is fixed to the elevating member (420) by the applied magnetic force, the height of the elevating chuck (30) can be easily controlled.
さらに図12に示したように、本発明の昇降チャック(30)と昇降装置(400)の間に特定の間隙(D)を与えるために、昇降チャック(30)の補助取付部材(31)は、特定の間隙(D)を持って昇降装置(400)の昇降部材(420)に固定することができる。 Further, as shown in FIG. 12, in order to provide a specific gap (D) between the lifting chuck (30) of the present invention and the lifting device (400), the auxiliary mounting member (31) of the lifting chuck (30) is It can be fixed to the elevating member (420) of the elevating device (400) with a specific gap (D).
前述したように、この構成により、昇降チャック(30)は自由に移動することができる。従って、昇降チャック(30)、あるいは昇降チャック(30)の補助取付部材(31)が、昇降装置(400)に含まれる昇降部材(420)の磁性部材(430)により供給される磁力により昇降部材(420)に固定されても、昇降チャック(30)の高さは容易に制御することができる。 As described above, this configuration allows the lifting chuck (30) to move freely. Accordingly, the elevating chuck (30) or the auxiliary mounting member (31) of the elevating chuck (30) is moved by the magnetic force supplied by the magnetic member (430) of the elevating member (420) included in the elevating device (400). Even if fixed to (420), the height of the lifting chuck (30) can be easily controlled.
明らかにし、かつ上記に述べたように、昇降モジュールおよび昇降モジュールを使用した昇降装置は、簡単な構造でLCDあるいはLEDなどのパネル部材を上下に直接移動させることができ、パネル部材の高さを制御することができ、高さ状態を維持している重量のあるパネル部材を高精度で扱うことができる。 As clarified and described above, the lifting module and the lifting device using the lifting module can directly move the panel member such as LCD or LED up and down with a simple structure, and the height of the panel member can be increased. A heavy panel member that can be controlled and maintains a height state can be handled with high accuracy.
10 昇降装置
30 昇降チャック
31a 高さ制御溝
200 固定部材
220 シャフト部材
222 ストッパ部材
230 案内部材
310 回転部材
330 第二の連結部材
20 装置基部
31 補助取付部材
100 昇降モジュール
210 基底部材
221 シャフト支持部材
223 ストッパ支持部材
300 回転装置
320 第一の連結部材
400 昇降装置
410 昇降部材
420 昇降部材
421 磁石支持部材
422 高さ制御突出部
430 磁性部材
500 駆動装置
510 ロータ
520 ステータ
600 回転連結部材
610 固定円環部材
620 回転円環部材
700 昇降連結部材
710 固定部材
720 可動部材
800 測定装置
810 手動の調整ユニット
811 調整ユニット支持部材
820 エンコーダ
830 スケール部材
900 落下防止装置
910 落下検出センサ
920 落下検出センサ
930 クランプユニット
931 クランプユニット支持部材
932 クランプ部材
10
Claims (8)
この昇降モジュールが、以下のもの、すなわち
基底部材(210)を含む固定部品(200)と、
回転装置であって、この回転装置が、回転可能でかつ垂直方向に可動に、前記基底部材(210)上に形成された、シャフト部材(220)と連結された回転装置(300)と、昇降装置であって、この昇降装置が、前記回転装置(300)および案内部材(230)と接続しており、前記昇降装置が、回転装置(300)の回転運動および上下方向での運動により駆動され、固定部材(200)上に形成された案内部材(230)上に沿って上下に移動する昇降装置(400)と、
駆動装置であって、この駆動装置が、回転装置(300)を回転するために、回転装置(300)と昇降装置(400)に同軸に連結している駆動装置(500)とを備えており、駆動装置(500)が、一つあるいは複数の永久磁石を備え、かつ回転装置(300)に形成されたロータ(510)と、昇降装置(400)に形成され、かつ電力が供給された際に磁力によりロータ(510)を回転させるステータを備えていることを特徴とする昇降モジュール。 A lifting module,
The lifting module comprises: a fixed part (200) including: a base member (210);
A rotating device (300) connected to a shaft member (220) formed on the base member (210) so as to be rotatable and movable in a vertical direction; The lifting device is connected to the rotating device (300) and the guide member (230), and the lifting device is driven by the rotating motion and the vertical motion of the rotating device (300). An elevating device (400) that moves up and down along a guide member (230) formed on the fixing member (200);
A driving device comprising a rotating device (300) and a driving device (500) coaxially coupled to the lifting device (400) for rotating the rotating device (300); When the driving device (500) is provided with one or a plurality of permanent magnets and formed in the rotor (510) formed in the rotating device (300) and the lifting device (400) and is supplied with electric power And a stator for rotating the rotor (510) by magnetic force.
ことを特徴とする昇降装置。 A lifting device includes a device base (20), one or more lifting modules (100) according to any one of claims 1 to 7, and a lifting device (400) included in the lifting module (100). And an elevating chuck (30) fixed to the uppermost part of the elevating device.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2012-0050369 | 2012-05-11 | ||
| KR1020120050369A KR101379834B1 (en) | 2012-05-11 | 2012-05-11 | Elevating module and elevating apparatus using the same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014003281A JP2014003281A (en) | 2014-01-09 |
| JP2014003281A5 JP2014003281A5 (en) | 2016-06-02 |
| JP6261185B2 true JP6261185B2 (en) | 2018-01-17 |
Family
ID=49854448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013099172A Active JP6261185B2 (en) | 2012-05-11 | 2013-05-09 | Lifting module and lifting device using the lifting module |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6261185B2 (en) |
| KR (1) | KR101379834B1 (en) |
| TW (1) | TWI623474B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101474695B1 (en) | 2014-09-18 | 2014-12-18 | (주)삼정오토메이션 | Z-axis stage using direct drive motor |
| KR102567650B1 (en) | 2021-12-28 | 2023-08-18 | 주식회사 한성시스코 | Stage device including a z-axis stage and a z-axis stage |
| KR20240105986A (en) | 2022-12-29 | 2024-07-08 | 주식회사 한성시스코 | Stage device equipped with a chuck rotating part |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2876388B2 (en) * | 1994-09-02 | 1999-03-31 | 東京エレクトロン株式会社 | Transfer device |
| KR20000002236U (en) * | 1998-06-19 | 2000-02-07 | 김영환 | Linear motor |
| JP4032911B2 (en) * | 2002-10-02 | 2008-01-16 | 豊和工業株式会社 | Spindle head drop prevention device for linear motor driven machine tools |
| JP2005051188A (en) * | 2003-07-28 | 2005-02-24 | Yasuhito Itagaki | Carrying-process layout method, composite-function robot, and clamping type aligner device having completely hermetic structure |
| KR100637590B1 (en) * | 2005-07-08 | 2006-10-23 | 주식회사 탑 엔지니어링 | Apparatus for cutting glass substrates in manufacturing process of flat type displayer |
| JP4836684B2 (en) * | 2006-06-21 | 2011-12-14 | 株式会社日本マイクロニクス | Inspection stage and inspection device |
| KR100779029B1 (en) * | 2006-12-15 | 2007-11-23 | 세크론 주식회사 | Probe station and testing method for a wafer using the same |
| KR20130040805A (en) * | 2010-04-07 | 2013-04-24 | 가부시키가이샤 야스카와덴키 | θZ DRIVE APPARATUS AND STAGE APPARATUS |
-
2012
- 2012-05-11 KR KR1020120050369A patent/KR101379834B1/en active IP Right Grant
-
2013
- 2013-03-04 TW TW102107484A patent/TWI623474B/en active
- 2013-05-09 JP JP2013099172A patent/JP6261185B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TW201400388A (en) | 2014-01-01 |
| KR101379834B1 (en) | 2014-04-01 |
| TWI623474B (en) | 2018-05-11 |
| KR20130126328A (en) | 2013-11-20 |
| JP2014003281A (en) | 2014-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108358058B (en) | Gesture-adjusting intelligent lifting appliance | |
| CN208843606U (en) | A kind of intelligent suspender of posture adjustment | |
| CN104105941B (en) | Coordinate measuring machine with restrained counterweight | |
| CN101726352B (en) | Six-degree-of-freedom (DOF) reset device for balance calibration system | |
| JP6261185B2 (en) | Lifting module and lifting device using the lifting module | |
| CN107179460A (en) | Electric automobile wireless charging system test position adjusting device | |
| CN103575463A (en) | Independent weight loading-unloading dead-load type torque measurement device | |
| CN103217342A (en) | Micro-torsion testing platform | |
| CN110002207A (en) | Jacking rotating mechanism and product pipeline | |
| US6766996B1 (en) | Manipulator | |
| CN116161586B (en) | Crown block lifting device | |
| CN211877061U (en) | Detection device | |
| TWI757438B (en) | Antenna locator, system for measuring unwanted electromagnetic radiation, and method for measuring unwanted electromagnetic radiation | |
| CN219328748U (en) | Multi-dimensional neutron experiment sample bearing platform | |
| CN210570495U (en) | All-round imager | |
| CN210419066U (en) | Self-adjusting flexible installation and calibration device adopting hoisting mode | |
| CN103292702B (en) | A kind of silicon rod physical dimension measuring instrument | |
| CN105067188A (en) | Rotary lifting platform for automatic counterweight loading device | |
| CN111998761A (en) | Oil cylinder displacement sensor, hydraulic oil cylinder, supporting leg leveling device, engineering machine and hydraulic robot | |
| CN216308881U (en) | Position detection mechanism of magnetizing equipment | |
| CN202275167U (en) | Precise inclined platform device for static calibration by seismometer | |
| JP5886084B2 (en) | Stage equipment | |
| KR102688248B1 (en) | Zt stage | |
| CN215953199U (en) | Model structure of complex mechanical load bearing verification module | |
| CN221625788U (en) | Transfer robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170501 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170913 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6261185 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |