JP6234087B2 - 距離検出装置及び距離検出方法 - Google Patents
距離検出装置及び距離検出方法 Download PDFInfo
- Publication number
- JP6234087B2 JP6234087B2 JP2013141955A JP2013141955A JP6234087B2 JP 6234087 B2 JP6234087 B2 JP 6234087B2 JP 2013141955 A JP2013141955 A JP 2013141955A JP 2013141955 A JP2013141955 A JP 2013141955A JP 6234087 B2 JP6234087 B2 JP 6234087B2
- Authority
- JP
- Japan
- Prior art keywords
- correction
- conversion coefficient
- pixels
- distance
- pixel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
- Color Television Image Signal Generators (AREA)
Description
結像光学系を通過した可視光を含む光束を導波路部材を介して光電変換部で受光する撮像素子であって、分光感度が互いに異なる複数種類の画素を含み、前記画素の少なくとも一部の画素は、前記導波路部材によって前記結像光学系の第1の瞳領域を通過した光束と第2の瞳領域を通過した光束を分離して前記光電変換部で受光されるように構成され、前記結像光学系の第1の瞳領域を通過した光束に基づく第1の信号と、前記結像光学系の第2の瞳領域を通過した光束に基づく第2の信号とを生成する測距画素である、撮像素子と、
前記結像光学系のデフォーカス量に基づいて距離を検出する演算処理部であって、
前記第1の信号と前記第2の信号に各々依拠する第1の像と第2の像の相対的位置ずれを表す像ズレ量を算出する像ズレ量算出処理と、
前記像ズレ量を前記結像光学系のデフォーカス量に変換するための補正変換係数を、定数である基準変換係数と、前記複数種類の画素から取得される補正信号に基づいて所定の算出式にしたがって求められる補正パラメータとに基づいて決定する変換係数算出処理と、
前記像ズレ量と前記補正変換係数とを用いて距離の算出を行う距離算出処理と、
を行う、演算処理部と、
を備え、
前記補正パラメータは、前記光束の波長に応じて変化するパラメータであり、前記複数種類の画素で受光する波長帯域のうちの可視光波長領域の中央付近の波長に対して最大値または最小値をとるパラメータである、
ことを特徴とする。
前記第1の信号と前記第2の信号に各々依拠する第1の像と第2の像の相対的位置ずれを表す像ズレ量を算出する像ズレ量算出ステップと、
前記像ズレ量を前記結像光学系のデフォーカス量に変換するための補正変換係数を、定数である基準変換係数と、前記複数種類の画素から取得される補正信号に基づいて所定の算出式にしたがって求められる補正パラメータとに基づいて決定する変換係数算出ステップと、
前記像ズレ量と前記補正変換係数とを用いて距離の算出を行う距離算出ステップと、
を含み、
前記変換係数算出ステップにおいて、前記補正パラメータは、前記光束の波長に応じて変化するパラメータであり、前記複数種類の画素で受光する波長帯域のうちの可視光波長領域の中央付近の波長に対して最大値または最小値をとるパラメータとして算出される、
ことを特徴とする。
<構成>
図1(a)は、本実施例に係る距離検出装置102を備えた撮像装置100を示す模式図である。撮像装置100は、結像光学系101と、距離検出装置102を備えて構成されている。距離検出装置102は、撮像素子103と演算処理部104とメモリ105を有している。

bは第2の瞳領域131bからの光束を主として受光する光電変換部110Gbの感度をそれぞれ示している。図2(a)に示した画素感度を測距画素110Gから射出瞳130上に射影にすると、図2(b)に示す瞳感度分布情報が得られる。図2(b)で、色が濃い領域ほど高い感度を有している。各光電変換部の瞳感度分布の重心位置141a、141bの間の長さが基線長Wとなる。
演算処理部104における演算フローを踏まえた本実施例に係る距離算出処理のフローチャートの一例を図3に示す。以下、(式2)に基づく被写体の距離算出方法を、フローチャートを参照して説明する。
と予め定義された算出式(算出方法)とにより求まり、測距対象となる被写体光の波長に応じて変動する変数である。また、補正パラメータPは、画素120R、120G、120Bで受光する光の波長帯域の中央付近の波長の光に対して、最大値あるいは最小値をとる変数である。なお、中央付近の波長とは、ここでは画素120Gの分光感度ピークを含む所定の範囲の波長である。例えば、画素120B及び120Gの分光感度ピークの平均値以上、かつ、画素120G及び120Rの分光感度ピークの平均値以下とすることができる。
本実施例に係る距離検出装置により、高精度の距離算出が可能となる理由について説明する。
補正パラメータの算出式は、(式5)に限定されるものではない。例えば、(式7)、(式8)の算出式でもよい。あるいは、測距画素110Gの変換係数の波長依存性に応じて、更に複雑な算出式を用いても良い。
測距画素110G及び周辺の撮像画素120に入射する光の波長分布は、画素の位置に応じてバラつきが生じる。これは、例えば、デフォーカスによって測距対象の被写体の周辺にある物体からの光束の一部が入射することで生じる。あるいは、結像光学系の色収差によっても生じる。
きる。これにより、測距信号を生成する光と出来るだけ同じ、または同じ波長分布を有する光に基づく補正信号を用いて補正変換係数を算出することでき、正確な変換係数を算出することができる。
補正パラメータの算出式は、(式5)や(式7)のような、緑光を取得する画素120Gの取得信号Gsあるいはその逆数1/Gsに比例する式が望ましい。ベイヤー配列において、画素120Gは、他の画素120Rや120Bよりも密に配置される。撮像素子103上の多くの場所で信号を取得することができ、前述の画素位置に応じたバラつきの影響を緩和し、正確な信号を取得することができる。また、人の眼の感度が高い緑波長付近の被写体光を、他の画素よりも正確に受光することができ、補正パラメータの値が適切に算出でき、高精度な距離検出が可能となる。
び補正係数の数値データを予めメモリ105に保持しておき、測距時の条件に応じて、適時読み出して使用してもよい。あるいは、各係数を焦点距離や絞り、像高(撮像素子上の測距位置)等を変数とする2次関数で近似する。そして、2次関数の係数をメモリ105に格納しておき、測距時の条件に応じて、適宜係数を読み出し、基準変換係数及び補正係数を算出してもよい。また、各測距条件において、補正変換係数の算出式より求まる補正変換係数値をメモリに保持しておき、補正パラメータの値に応じて、補正変換係数の値を適時読み出してもよい。
以上の説明では、(式2)に基づき、比例係数に相当する補正変換係数K´を算出し、距離を算出する手法について説明したが、他の補正変換係数を算出し、距離を算出しても良い。例えば、(式1)に基づき、基線長に相当する補正変換係数W´を算出し、距離を算出してもよい。補正基線長W´及びデフォーカス量は(式12)及び(式13)より算出できる。
本実施例に係る距離検出装置における撮像素子は、具体的には、CMOSセンサ(相補型金属酸化物半導体を用いたセンサ)や、CCDセンサ(電荷結合素子を用いたセンサ)等の固体撮像素子を用いることができる。
ら被写体像信号を取得しても良いし、撮像画素および測距画素の両方から被写体像信号を取得しても良い。
した前記光束の結像面と、の距離を示すデフォーカス量に基づいて前記被写体までの距離を検出することと捉えることができる。
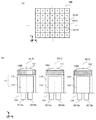
本例では、図1を用いて説明した撮像装置100における撮像素子103及び演算処理部104における処理の別の構成例を図6及び図7に示す。図6(a)に示すように、撮像素子200は、測距画素201R、201G、201Bが並置されて構成されている。各画素は、図6(b)に示すように、マイクロレンズ111、カラーフィルタ122R、122G、122B、導波路113、光電変換部202a、202b、203a、203b、204a、204bで構成されている。測距画素201R、201G、201Bは、分光感度が互いに異なり、それぞれ、主として赤光、緑光、青光を取得する画素となっている。各画素は、図示しない配線を備えている。
1Bで取得した一対の信号201Rs、201Gs、201Bsの強度を比較し、もっとも強度が大きい(S/Nが良い)信号を取得する測距画素を選択してもよい。測距信号の比較は、例えば、撮像素子200上の所定の領域内において、各測距画素で取得した信号の総和あるいは最大値を比較する。あるいは、各測距画素で距離を算出し、最も信頼度が高い信号で算出した値を採用してもよい。信頼度は、例えば、各信号の強度やコントラスト等で評価でき、強いほど高くなる。これらの手法により、被写体の色に応じて、最も高精度に算出される距離値を採用することができ、高精度な測距が可能となる。
103 撮像素子
110G 測距画素
104 演算処理部
Claims (20)
- 結像光学系を通過した可視光を含む光束を導波路部材を介して光電変換部で受光する撮像素子であって、分光感度が互いに異なる複数種類の画素を含み、前記画素の少なくとも一部の画素は、前記導波路部材によって前記結像光学系の第1の瞳領域を通過した光束と第2の瞳領域を通過した光束を分離して前記光電変換部で受光されるように構成され、前記結像光学系の第1の瞳領域を通過した光束に基づく第1の信号と、前記結像光学系の第2の瞳領域を通過した光束に基づく第2の信号とを生成する測距画素である、撮像素子と、
前記結像光学系のデフォーカス量に基づいて距離を検出する演算処理部であって、
前記第1の信号と前記第2の信号に各々依拠する第1の像と第2の像の相対的位置ずれを表す像ズレ量を算出する像ズレ量算出処理と、
前記像ズレ量を前記結像光学系のデフォーカス量に変換するための補正変換係数を、定数である基準変換係数と、前記複数種類の画素から取得される補正信号に基づいて所定の算出式にしたがって求められる補正パラメータとに基づいて決定する変換係数算出処理と、
前記像ズレ量と前記補正変換係数とを用いて距離の算出を行う距離算出処理と、
を行う、演算処理部と、
を備え、
前記補正パラメータは、前記光束の波長に応じて変化するパラメータであり、前記複数種類の画素で受光する波長帯域のうちの可視光波長領域の中央付近の波長に対して最大値または最小値をとるパラメータである、
距離検出装置。 - 前記演算処理部は、前記変換係数算出処理において、下記の式にしたがって前記補正変換係数を決定する、
請求項1に記載の距離検出装置。
正パラメータであり、基準変換係数K0および補正係数αは前記測距画素の分光感度特性と前記補正パラメータの算出式とに基づいて決定される定数である。 - 前記複数種類の画素は、それぞれ第1、第2、第3の波長帯域において高い感度を有する3種類の画素である、
請求項1または2に記載の距離検出装置。 - 前記補正パラメータは、前記3つの波長帯域のうちの中央の波長帯域において高い感度を有する画素から取得した信号を、前記3種類の画素の信号の和で除算することによって求められる、
請求項3に記載の距離検出装置。 - 前記補正パラメータは、前記3種類の画素の信号の和を、前記3つの波長帯域のうちの中央の波長帯域において高い感度を有する画素から取得した信号で除算することによって求められる、
請求項3に記載の距離検出装置。 - 前記基準変換係数は、前記中央付近の波長の光に対する前記測距画素の変換係数とは異なる値である、
請求項1乃至5のいずれか1項に記載の距離検出装置。 - 前記補正信号は、前記測距画素の近傍の前記複数種類の画素で取得した信号である、
請求項1乃至6のいずれか1項に記載の距離検出装置。 - 前記補正信号の少なくとも一つは、前記測距画素で取得した信号である、
請求項1乃至7のいずれか1項に記載の距離検出装置。 - 前記補正信号は、前記複数種類の画素の各々の種類の画素において、複数の画素で取得した信号を平均した平均信号である、
請求項1乃至8のいずれか1項に記載の距離検出装置。 - 前記基準変換係数または前記補正係数は、前記結像光学系の焦点距離または絞りあるいは前記測距画素の前記撮像素子上における位置に応じて異なる値として決定される、
請求項1乃至9のいずれか1項に記載の距離検出装置。 - 前記補正パラメータは、前記結像光学系の焦点距離または絞りあるいは前記測距画素の前記撮像素子上における位置に応じて異なる算出式にしたがって決定される、
請求項1乃至10のいずれか1項に記載の距離検出装置。 - 前記演算処理部は、前記変換係数算出処理において、前記複数種類の画素から取得される補正信号に基づいて決定される第2の補正パラメータも用いて前記補正変換係数を算出し、
前記第2の補正パラメータは、前記複数種類の画素で受光する波長帯域が高波長になるしたがって単調増加または単調減少するパラメータである、
請求項1乃至11のいずれか1項に記載の距離検出装置。 - 前記変換係数算出処理において、下記の式にしたがって前記補正変換係数を決定する、
請求項12に記載の距離検出装置。
- 前記距離算出処理は、前記補正変換係数と、前記像ズレ量と、を用いて前記デフォーカス量を算出する処理である、
請求項1乃至13のいずれか1項に記載の距離検出装置。 - 前記距離算出処理は、前記補正変換係数と、前記結像光学系の射出瞳と前記撮像素子との距離と、前記像ズレ量と、を用いて前記デフォーカス量を算出する処理である、
請求項1乃至13のいずれか1項に記載の距離検出装置。 - 前記複数種類の画素の各画素に、前記測距画素が配置され、
前記算出式または前記基準変換係数または前記補正係数は、該測距画素の種類に応じて異なる算出式または係数である、
請求項1乃至15のいずれか1項に記載の距離検出装置。 - 請求項1乃至16のいずれか1項に記載の距離検出装置を備え、
前記複数種類の画素から得られる信号から被写体像信号を生成する、
撮像装置。 - 前記撮像装置は、デジタルスチルカメラであることを特徴とする請求項17に記載の撮像装置。
- 前記撮像装置は、デジタルビデオカメラであることを特徴とする請求項17に記載の撮像装置。
- 結像光学系を通過した可視光を含む光束を導波路部材を介して光電変換部で受光する撮像素子であって、分光感度が互いに異なる複数種類の画素を含み、前記画素の少なくとも一部の画素は、前記導波路部材によって前記結像光学系の第1の瞳領域を通過した光束と第2の瞳領域を通過した光束を分離して前記光電変換部で受光されるように構成され、前記結像光学系の第1の瞳領域を通過した光束に基づく第1の信号と、前記結像光学系の第2の瞳領域を通過した光束に基づく第2の信号とを生成する測距画素である、撮像素子を有する距離検出装置が行う距離検出方法であって、
前記第1の信号と前記第2の信号に各々依拠する第1の像と第2の像の相対的位置ずれを表す像ズレ量を算出する像ズレ量算出ステップと、
前記像ズレ量を前記結像光学系のデフォーカス量に変換するための補正変換係数を、定数である基準変換係数と、前記複数種類の画素から取得される補正信号に基づいて所定の算出式にしたがって求められる補正パラメータとに基づいて決定する変換係数算出ステップと、
前記像ズレ量と前記補正変換係数とを用いて距離の算出を行う距離算出ステップと、
を含み、
前記変換係数算出ステップにおいて、前記補正パラメータは、前記光束の波長に応じて変化するパラメータであり、前記複数種類の画素で受光する波長帯域のうちの可視光波長領域の中央付近の波長に対して最大値または最小値をとるパラメータとして算出される、
距離検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013141955A JP6234087B2 (ja) | 2013-07-05 | 2013-07-05 | 距離検出装置及び距離検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013141955A JP6234087B2 (ja) | 2013-07-05 | 2013-07-05 | 距離検出装置及び距離検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015014732A JP2015014732A (ja) | 2015-01-22 |
| JP6234087B2 true JP6234087B2 (ja) | 2017-11-22 |
Family
ID=52436477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013141955A Expired - Fee Related JP6234087B2 (ja) | 2013-07-05 | 2013-07-05 | 距離検出装置及び距離検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6234087B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115712118B (zh) * | 2022-11-07 | 2023-08-11 | 江苏省水利科学研究院 | 一种像素偏移量追踪监测及校正方法 |
| CN116542919B (zh) * | 2023-04-26 | 2025-12-05 | 四川师范大学 | 基于图像处理技术的植物gus信号识别算法 |
| CN117119646B (zh) * | 2023-10-20 | 2024-08-16 | 南通医疗器械有限公司 | 无影灯调控方法及系统 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5045801B2 (ja) * | 2009-09-09 | 2012-10-10 | 株式会社ニコン | 焦点検出装置、撮影レンズユニット、撮像装置およびカメラシステム |
| JP5454223B2 (ja) * | 2010-02-25 | 2014-03-26 | 株式会社ニコン | カメラ |
| JP5812610B2 (ja) * | 2011-01-18 | 2015-11-17 | キヤノン株式会社 | 固体撮像素子及び固体撮像素子を有する撮像システム |
-
2013
- 2013-07-05 JP JP2013141955A patent/JP6234087B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015014732A (ja) | 2015-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6172982B2 (ja) | 撮像装置及びカメラシステム | |
| US10582180B2 (en) | Depth imaging correction apparatus, imaging apparatus, and depth image correction method | |
| US10659744B2 (en) | Distance information generating apparatus, imaging apparatus, and distance information generating method | |
| JP6021780B2 (ja) | 画像データ処理装置、距離算出装置、撮像装置および画像データ処理方法 | |
| JP5358039B1 (ja) | 撮像装置 | |
| US10477100B2 (en) | Distance calculation apparatus, imaging apparatus, and distance calculation method that include confidence calculation of distance information | |
| JP2014063142A (ja) | 距離検出装置、撮像装置、プログラム、記録媒体および距離検出方法 | |
| TWI569647B (zh) | 用於穩健晶片內建相位檢測之影像感測器以及相關系統和方法 | |
| JP6921500B2 (ja) | 距離検出装置および距離検出方法 | |
| JP6353233B2 (ja) | 画像処理装置、撮像装置、及び画像処理方法 | |
| US20180270409A1 (en) | Image pickup apparatus and image pickup system | |
| JP6234087B2 (ja) | 距離検出装置及び距離検出方法 | |
| JP2014216970A (ja) | 測距装置 | |
| JP6116151B2 (ja) | 距離検出装置 | |
| US10602050B2 (en) | Image pickup apparatus and control method therefor | |
| US20150319357A1 (en) | Ranging apparatus, imaging apparatus, ranging method and ranging parameter calculation method | |
| US20150201173A1 (en) | Image processing apparatus, image pickup apparatus and image processing program for correcting color blur | |
| US9841580B2 (en) | Distance measuring apparatus | |
| JP5850648B2 (ja) | 撮像装置 | |
| US10339665B2 (en) | Positional shift amount calculation apparatus and imaging apparatus | |
| JP6632406B2 (ja) | 距離算出装置、撮像装置、および距離算出方法 | |
| JP2015015704A (ja) | 測距装置、撮像装置及び測距装置の制御方法 | |
| JP2014153494A (ja) | 測距装置 | |
| US9402069B2 (en) | Depth measurement apparatus, imaging apparatus, and method of controlling depth measurement apparatus | |
| JP7057090B2 (ja) | 測距装置および測距方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171024 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6234087 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |