JP6232032B2 - ロボットヘリオスタットの較正システムおよび方法 - Google Patents
ロボットヘリオスタットの較正システムおよび方法 Download PDFInfo
- Publication number
- JP6232032B2 JP6232032B2 JP2015219709A JP2015219709A JP6232032B2 JP 6232032 B2 JP6232032 B2 JP 6232032B2 JP 2015219709 A JP2015219709 A JP 2015219709A JP 2015219709 A JP2015219709 A JP 2015219709A JP 6232032 B2 JP6232032 B2 JP 6232032B2
- Authority
- JP
- Japan
- Prior art keywords
- solar
- robot
- robot controller
- solar part
- orientation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S30/40—Arrangements for moving or orienting solar heat collector modules for rotary movement
- F24S30/45—Arrangements for moving or orienting solar heat collector modules for rotary movement with two rotation axes
- F24S30/452—Vertical primary axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
- F24S50/20—Arrangements for controlling solar heat collectors for tracking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S20/00—Solar heat collectors specially adapted for particular uses or environments
- F24S2020/10—Solar modules layout; Modular arrangements
- F24S2020/16—Preventing shading effects
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S2030/10—Special components
- F24S2030/13—Transmissions
- F24S2030/134—Transmissions in the form of gearings or rack-and-pinion transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S50/00—Arrangements for controlling solar heat collectors
- F24S50/20—Arrangements for controlling solar heat collectors for tracking
- F24S2050/25—Calibration means; Methods for initial positioning of solar concentrators or solar receivers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/40—Solar thermal energy, e.g. solar towers
- Y02E10/47—Mountings or tracking
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Thermal Sciences (AREA)
- Physics & Mathematics (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
- Photovoltaic Devices (AREA)
Description
本出願は、参照によりすべてが本明細書の一部を構成する、2010年12月3日に出
願された米国特許仮出願第61/419685号、2011年5月27日に出願された米
国実用特許第13/118274号、および2011年7月13日に出願された米国実用
特許第13/182297号の優先権を主張するものである。
ストの低減に関する多数の開発がなされている。集光型太陽熱システムにおいて、ヘリオ
スタットアレイは、二重軸で位置を変える機構を利用して、ヘリオスタットミラーの法線
ベクトルに現在の太陽の位置とターゲットとの間の角度を二等分させることによって中央
タワーに対する日光の方向を調整する。ヘリオスタットのビームをターゲットに厳密に揃
えるには、9つのパラメータを定めなければならない。3つのパラメータは、受信側ター
ゲットに対するヘリオスタットの位置を定めるのに必要である。1つのパラメータは、パ
ンおよびチルトホームポジションにおける公差の理由を説明するために必要とされる。1つのパラメータは、ミラー取付けオフセットを定めるのに必要であり、定められた軸の非
垂直を定めるのに追加のパラメータが必要である。最後の3つのパラメータは、全地球3
軸座標系におけるヘリオスタットの方位を画定するのに必要とされる。
用する方法である。この方法によってヘリオスタットを厳密に調整するには、ヘリオスタ
ットの幾何学的位置および既知の角度に対する現在のパン/チルト角度に関する情報を含
む比較的多数の正確なサンプルが必要である。現在の較正手法に関する主要な問題は、正
確な個別の1組のサンプルを得るには、正確に位置付けられた太陽検知デバイスまたは光
検知デバイスに対して各ヘリオスタットを較正しなければならないことである。大形のヘリオスタットの場合(たとえば、>20m2)、このことは、1日中、太陽を追尾し、ヘリオスタットのエンコーダシステムによって測定された角度と既知の太陽の角度を比較する付属の太陽センサによって実現され得る。現業員は、較正プロセスが完了するまでこの太陽追尾装置をヘリオスタットからヘリオスタットへと移動させなければならない。より小形のヘリオスタットの場合、反射面積が狭くなり、一方、ヘリオスタット当たりに必要な労力が一定であるので、この手法は費用効果が低い。マイクロヘリオスタット設置業者は、現場の既知の幾何学的位置に太陽センサを配置し、各ヘリオスタットをこれらのセンサに対して較正することによってこの問題の解決を試みている。較正タワー/センサを厳密に設置する必要があり、ヘリオスタットの設置の融通性に制約が課され、完全に装備されたシステムのコストの一部になるので、この手法には問題がある。
あって、オンボードセンサーを利用してソーラー部の表面に関する情報を収集することが
できるようにロボットコントローラ自体をソーラー部の表面の近くに位置決めするための
駆動システムを含むロボットコントローラである。オンボードコミュニケーションユニッ
ト(onboard communication unit)が情報を中央処理ネットワークに中継し、このプロセ
ッサは、新しい情報を記憶されている履歴データと組み合わせ、ソーラー部の表面の較正
、および/または、その瞬間的な最盛状態の判定を行う。
説明するが、本発明が本明細書で開示する厳密な構成および構成要素に限定されず、請求
の範囲に記載された本発明の趣旨および範囲から逸脱せずに本発明の方法および装置の構
成、動作、および細部に様々な修正、変更、および変形がなされ得ることを理解されたい
。
は三角測量システムを使用することによって全地球座標系または相対座標系におけるロボ
ットコントローラの位置を求めることができる。
知システム、自然光型カメラシステム、または立体照明型カメラシステムを使用すること
によって全地球座標系または相対座標系におけるロボットコントローラの位置を求めるこ
とができる。
けるロボットコントローラの既知の位置を使用し、オンボード距離検知システム、自然光
型カメラシステム、または立体照明型カメラシステムを使用することによって全地球座標
系または相対座標系におけるソーラー部の表面の幾何学的原点を求めることができる。
コンパス、固体コンパス、加速度計、傾斜計、磁力計、ジャイロスコープ、または太陽セ
ンサを使用することによって全地球3軸方向座標系におけるロボットコントローラの方位
を求めることができる。
コントローラの既知の方位を使用し、オンボード距離検知システム、自然光型カメラシス
テム、または立体照明型カメラシステムを使用することによってソーラー部の表面の3軸
方位を求めることができる。
コントローラの既知の方位を使用し、オンボード距離検知システム、自然光型カメラシス
テム、または立体照明型カメラシステムを使用することによってソーラー部の表面のペデ
スタル軸の非垂直を決定し特徴を調べることができる。
チューブまたは光ファイバーシステムと連動させて、ソーラー部の表面が太陽に一致して
いるかどうかを決定することができる。
らの瞬間電力出力情報を使用して、ソーラー部の表面が太陽に一致しているかどうかを決
定することができる。
ボードリポジショナル光源を利用して、ソーラー部の表面によって生成される電力をディ
ザ(dither)することができる。このディザ信号を使用してソーラー部の表面の最
盛状態を決定することができる。
されたデータを使用してソーラー部の表面の領域のマップを生成することができる。この
仮想マップを使用してバックトラッキングアルゴリズムを最適化することができる。
複数のデータポイントを使用して製造誤差の特徴を調べ、現在のシステムバックラッシュ
および履歴システムバックラッシュを決定し、現場設置公差の特徴を調べ、グランドセッ
ト(ground setting)の特徴を調べることができる。
理ユニット、または個々のソーラー部の表面もしくは他のロボットコントローラ上に配置
された分散処理ユニットによってソーラー部の表面に関して収集された情報を伝達するこ
とができる。
図面および明細書を考慮して多数の追加の特徴および利点が明らかになろう。さらに、本
明細書で使用されている用語が基本的に、明細書を読みやすくしかつ理解を容易にするた
めに選択されており、本発明の主題を描写または限定するために選択されたものではない
ことに留意されたい。
示している複数の図を参照して説明される。また、複数の図において、各参照数字の1番
左側の数字は、その参照数字が最初に使用された図に対応する。
連して説明される特定の特徴、構造、または特性が本発明の少なくとも1つの実施例に含
まれることを意味する。本明細書の様々な個所で「一つの実施例では」または「実施例」
という語句の出現は、必ずしもすべてが同じ実施例を参照しているとは限らない。
ために構成され、例えば、特定のコンピュータであってもよく、あるいは、それが、コン
ピュータに記憶されたコンピュータプログラムによって選択的に作動または構造が変更される汎用コンピュータからなってもよい。そのようなコンピュータプログラムは、限定されないが、フロッピィディスク、光ディスク、CD−ROM、光磁気ディスクを含むいずれかの形式のディスク、読取り専用メモリ(ROM)、ランダムアクセスメモリ(RAM)、EPROM、EEPROM、磁気カードまたは光学式カード、特定用途向け集積回路(ASIC)のような、あるいは、電子命令を記憶するのに適した任意の種類の媒体のような、コンピュータが読み取り可能な記憶媒体に記憶され得る。メモリは、情報、データ、プログラムを記憶することのできる上述のデバイス、および/または、他のデバイスのいずれかのデバイスを含んでもよい。さらに、本明細書で述べるコンピュータは、単一のプロセッサを含んでもよく、あるいは、計算能力が向上した複数のプロセッサ設計を使用するアーキテクチャ(architecture)の構成であってもよい。
のコンピュータまたは他の装置に関係するものではない。様々な汎用システムも、本明細
書中、教示に従ったプログラムにより使用可能とされ、あるいは、それが、その方法の工
程を実行するようにより限定した装置を構成するために好都合であることがわかる。これ
らの様々なシステムのための構造が、以下の説明から明らかになろう。さらに、本発明は
、いずれかの特定のプログラミング言語に関連して説明されていない。様々なプログラミ
ング言語が、本明細書中、説明されるように。本発明の教示を実施するために使用可能と
され、以下の特定の言語についての言及が、本発明の実施可能性およびベストモードを開
示するためにもたらされることが了解されよう。
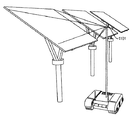
領域におけるロボットコントローラ自体の位置を決定できるロボットコントローラの実施
例を示す。ロボットコントローラは、第1のソーラー部の表面(101)および第2のソ
ーラー部の表面(106)の近くに位置を変え得る。この動作を実現する方法は、限定さ
れないが、体系的に整備されていない環境においてロボットコントローラを物理的に移動
させる外部システム、即ち、システムの集合体と、体系的に整備されている環境において
ロボットコントローラを物理的に移動させる外部システム、即ち、システムの集合体と、
体系的に整備されていない環境においてロボット自体を自律的に移動させることができる
オンボードシステム、即ち、システムの集合体と、体系的に整備されている環境において
ロボット自体を自律的に移動させることができるオンボードシステム、即ち、システムの
集合体と、体系的に整備されていない環境においてロボット自体を自律的に移動させるこ
とができるオンボードシステムと外部システムとの組合せと、体系的に整備されている環
境においてロボット自体を自律的に移動させることができるオンボードシステムと外部シ
ステムとの組合せとを含む。図1乃至図14は、ロボットコントローラが、オンボードセ
ンサーおよび電気機械システムの集合体を使用して体系的に整備されていない環境におい
て自律的に移動させることができるものとする。従来の開示では、特に、2010年7月
15日出願の米国仮出願第61/364729号(特許文献1)、2010年12月3日
出願の米国仮出願第61/419685号、米国実用特許出願第13/118274号、
および、米国実用特許出願第13/182297号は、より詳しく、体系的に整備されて
いる環境または体系的に整備されていない環境においてロボットコントローラの位置を自
律的に変える方法を説明している。
のみを使用して自律型の屋外位置感知およびナビゲーションを実現するために、地上の障
害物に遭遇する必要がないようにフライトシステムおよびフライト制御システムを装備さ
れ得る。地上ロボットコントローラは、a)3次元地形、b)表面密度の変化、c)天候
の要件、およびd)検知される環境の不安定性により、移動できるシステムの集合体を含
まなければならない。これらの目的を実現する既存の一方法は、ロボットコントローラに
ついてa)3D視覚システムによって地形をマッピングし、b)この視野内の地形上の安
全な領域および安全でない領域を算出し、c)所望の目的地に向かう安全な領域を横切る
最適な経路を算出し、d)駆動モータ、車輪、および関連電子機器を含み得る駆動機構を
作動させ、e)目的地に到達するかあるいは目的地への経路が分からなくなるまでこのサ
イクルを繰り返すことである。ロボットコントローラ(104)が認識できる注意すべき
障害物は、ソーラー部の表面(101)、ソーラー部の表面の支持用構造システム(10
2)、および、ソーラー部の表面の支持用基礎(103)である。
自体を第1のソーラー部の表面(101)と第2のソーラー部の表面(106)との間で
移動させるための駆動機構(105)を含む。その駆動機構は、電気駆動モータに連結さ
れた複数の車輪を利用し、ロボットシャーシを、ステーションが第1のソーラー部の表面
または第2のソーラー部の表面の近く全般の領域として画定される地形の個々のソーラー
部の表面較正ステーション(107)の一部に進める。ロボットコントローラは、電気エ
ネルギーを駆動モータに供給し、他の電子機能を作動させるように、バッテリーを使った
電源装置を利用し得る。オンボード3D視覚システム(108)は、固有のソーラー部の
表面または地上の障害物(109)を認識するための構造化カメラシステムまたは自然光
型カメラシステムを使用し得る。オンボードマイクロプロセッサシステムは、安全な駆動
領域、最適な駆動経路(110)を算出するために使用可能とされ、駆動システムの電気
モータに最適な駆動経路を実行するように命令を送り得る。
るオンボード位置決めシステム(111)を含み得る。動作中、オンボード位置決めシス
テムは、全地球(X、Y、Z)座標におけるシステムの位置を絶えず更新され得る。この
システムは、全地球座標系で較正される複数のデバイスと通信することのできるGPSデ
バイス、即ち、三角測量システムを使用することによって機能され得る。三角測量システ
ムにおいて、3つの三角測量受信機/送信機が、システムオンボードロボットコントロー
ラと通信し得る。一実施例では、移動体三角測量システムは、信号相互間の遅延時間を測
定し各三角測量送信機までの未処理距離を測定する。これらの信号は、光学信号、電磁信
号、可聴信号であってもよい。これらの3つの送信機の幾何学的位置が既知である場合、
三角測量装置は、ソーラー部の表面の領域における相対位置または全地球位置を測定でき
る。ロボットコントローラは、ソーラー部の表面の領域におけるロボットコントローラの
相対位置を決定するように3D視覚システム(108)およびSLAMアルゴリズムを使
用し得る。
れたインフィールドセンサと一緒に実装された要素を使用しソーラー部の表面の領域にお
けるロボットコントローラ自体の位置を決定できるロボットコントローラの実施例を示す
。実施例において、ロボットコントローラは、自律的トータルステーション(total stat
ion)(202)に対応するオンボードターゲット(onboard target)(201)を含み
得る。この構成では、そのトータルステーションが既知の位置(203)に配置され、ロ
ボット(104)は、領域全体にわたって逆反射ターゲット(201)を自動的に移動さ
せる。そのトータルステーションは、逆反射ターゲットまでの距離を測定することができ
、ターゲットの相対位置を移動ロボットコントローラ(104)に知らせる。位置を検知
するための他のシステム、および/または、方法は、限定されないが、複数の較正された
タワーまたはターゲットまでの距離を決定できるロボットコントローラに搭載した距離検
知システムを利用すること、較正されたタワーまたはターゲットまでの距離を決定するた
めの1つ以上の自然光型カメラを利用すること、あるいは、構造光型位置検知技術を利用
することを含む。
ー部の表面の領域におけるロボットの位置の決定について、ロボットを支援するように使
用可能とされる。たとえば、ロボットコントローラは、固定した線構造に沿って移動する
場合、ロボットコントローラが、最小自乗法を使用してすべての位置点を近似線に合わせ
るように、複数の位置読取り値を使用し得る。
学的原点までの距離を知るために使用することのできる一つのシステムを示す。ソーラー
部の表面の幾何学的原点(301)は、ソーラー部の表面が旋回する点として定義され得
る。構造光発光器およびセンサを含む構造光カメラシステム(302)は、X、Y、Z座
標においてロボットコントローラからソーラー部の表面の幾何学的原点(301)、また
は、ソーラー部の表面の支持構造(102)もしくは支持基礎(103)におけるマーク
(303)までの距離を検知するために使用可能とされる。このマークは、幾何学的原点
に対し予め確定したオフセットを有してもよい。ロボットコントローラは、この点までの
距離を決定することにより、予め確定した幾何学的オフセットを利用することによってソ
ーラー部の表面の原点までの距離を近似し得る。
システムは、限定されないが、自然光型カメラまたはカメラのシステムを利用すること、
1つ以上のレーザ距離センサを利用すること、物理的プローブシステムを利用すること、
あるいは、ソーラー部の表面、またはソーラー部の表面の支持構造またはソーラー部の表
面の支持基礎におけるある箇所によって放出された信号を検出することのできるシステム
を利用することが含まれる。個々のソーラー部の表面におけるマーク(303)または一
群のマークは、限定されないが、逆反射ターゲット、カラーコード化ターゲット、ソーラ
ー部の表面またはその支持構造における固有の物理的フィーチャ、あるいは、磁気信号、
電磁信号、または可聴信号を放出する信号放出装置を含んでもよい。
部の表面の幾何学的原点に対する距離を決定することについて、支援するために使用可能
とされる。一例として、ロボットコントローラがソーラー部の表面の幾何学的原点(30
1)からの既知のオフセット量をもって幾何学的線に拘束される場合、ロボットコントロ
ーラは、他の2つの次元が想定されるとき、一次元においてそのオフセット量を算出する
だけでよい。
座標における位置を測定するためにロボットコントローラが使用できる工程を示す。この
工程は、図1乃至図3に示される複数の方法と工程とを組み合わせたものである。
により、ロボットコントローラがこの地形における安全な領域および安全でない領域を算
出できる(402)。ロボットコントローラは、個々のソーラー部の表面までの距離を検
出することのできるステーション検知システムを備え、算出された安全な領域と組み合わ
せられたこの情報が、次のステーションまたは較正ゾーンまでの最適な経路を算出するた
めに使用可能とされる(403)。実施例では、ロボットコントローラは、個々のヘリオ
スタット上のキーフィーチャ(key feature)を検出できる1つ以上のオンボードカメラ
を有する。他の実施例は、限定されないが、各ヘリオスタットを含み、ヘリオスタットは
、信号減衰を測定する較正ロボットにおける装置によって傍受される信号を放出し、周囲
をマッピングして分析するためにSONARまたはLiDAR型システムをロボットに備
え、TOF(time of flight )型3D走査システムを利用し、あるいは、ソーラー部の表面
またはその支持構造上に戦略的に配置された逆反射ターゲットと組み合わせてレーザ距離
センサシステムを利用する。
ョンまたは較正ゾーンの方へ移動する。ステーション相互間の移動中、ステーション検知
機構は、目的地に到達するまで、最適な駆動経路を駆動機構に対して連続的に更新するよ
うに使用可能とされるのに使用されてもよい(405)。この例では、目的地は、ソーラ
ー部の表面を較正するための範囲内にあるロボットコントローラによって画定される。プ
ロセスステップ401〜405は、車輪、キャタピラートラック、可動レグ、関節継手、
またはロボットコントローラの位置を変えるチェーン駆動装置を利用する駆動機構につい
て同様である。代替的な実施例では、駆動システムは、ステーション相互間でコントロー
ラの位置を変えるためにトラック式機構、ケーブル式機構、またはレール式機構を使用可
能である。そのロボットコントローラは、外部駆動装置または1組の駆動装置と通信しこ
の位置を変え実行する。
D空間におけるロボットコントローラの絶対位置または相対位置を知る。図1〜図2に描
かれるように、これは、全地球座標系において位置情報を高精度に知るリアルタイム全地
球測位システムによって実現され得る。3D空間における位置を測定する他の方法には、
限定されないが、標準的な全地球測位システムと、音声または光を放出する既知のセンサ
からの三角測量と、既知の位置までの距離を測定するロボットにおける複数のセンサと、
様々な距離においてパターンを認識し、あるいは手動全ステーション測量システムまたは
自律的全ステーション測量システムと通信するカメラ式システムとを含む。
ローラの位置を決定した(406)後、距離検知機構、および/または、既知の幾何学的
配置を使用し、X、Y、Z座標においてソーラー部の表面の幾何学的原点までの絶対距離
を知る(407)。ロボットコントローラは、この原点オフセットをロボットコントロー
ラの既知の位置に適用し、全地球座標系におけるソーラー部の表面の幾何学的位置を算出
できる(408)。たとえば、ロボットコントローラは、ロボットコントローラ自体がX
=4000、Y=4000、およびZ=4000の全地球位置に位置すると断定し、ヘリ
オスタットの原点が、較正ロボットの基準点からX=1、Y=2、およびZ=3の距離に
位置すると認識した場合、ソーラー部の表面の原点を全地球座標系においてX=4001
、Y=4002、およびZ=4003に較正する。
記憶ユニット、中央通信システム、または分散通信システムに送り得る(409)。実施
例では、較正ロボットは、ワイヤレス送信機を含む。データを送信するための他の実施例
は、限定されないが、個々のソーラー部の表面へのワイヤレス通信と、一群のソーラー部
の表面または中央コントローラへのワイヤレス通信と、個々のソーラー部の表面への直接
データリンクと、複数のソーラー部の表面または中央コントローラ用の直接データリンク
と、較正ロボットの電源によるデータ転送、あるいは、記憶媒体またはRFIDチップへ
の較正データのワイヤレスによる書込みによるデータ転送とを含む。
ソーラー部の表面がまだあるかどうかを決定する(410)。較正する必要のあるソーラ
ー部の表面がまだある場合、プロセスが、ステップ401を繰り返す。すべてのヘリオス
タットが較正されたならば、ロボットコントローラはそのホーム位置またはドッキング位
置に戻り得る(411)。このドックは、再充電ステーションまたは情報の記憶、もしく
は中央コントローラへ較正データを送るためのデータリンクを含み得る。
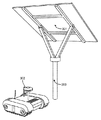
方位を求めることのできるロボットコントローラ(104)の実施例を示す図である。こ
の実施例では、ロボットは、オンボード加速度計を利用して重力および磁気コンパスに対
する方位を求め、地球の磁極に対する方位を求める。ロボットを全地球座標系に対して適
切に較正する他の方法には、オンボードジャイロコンパス、固体コンパス、GPSコンパ
ス、傾斜計、磁力計、ジャイロスコープ、または太陽センサが含まれるが、それらに限ら
ない。太陽センサを使用して瞬間太陽ベクトルに対するロボットコントローラの方位を求
めてもよい。ロボットコントローラは、現在時間を求め、この情報を近似GPS座標と組
み合わせることによって、太陽に対するロボットコントローラの方位を全地球3軸座標系
(501)にマッピングすることができる。
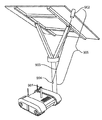
の表面の垂直ペデスタル軸を検出するのに使用することのできる一方法を示す。この方法
では、立体照明型発光装置およびセンサを備える立体照明型カメラシステム(302)を
使用してソーラー部の表面(101)の相対方位およびソーラー部の表面の垂直ペデスタ
ル軸(103)を検知してもよい。このカメラシステムは、有効視野を増大させるうえで
静的であっても、動的であってもよい。立体照明型発光装置は、ドットのパターン(60
1)をソーラー部の表面(101)、その支持構造(102)、およびその支持基礎(1
03)上に投影してもよい。この立体照明型パターンを検出することのできるセンサまた
はカメラから得られる情報を使用してフィーチャを検出し、このようなフィーチャを幾何
学的平面に当てはめてもよい。
出プロセスにおいて助ける機能を含んでもよい。このような機能には、事前に定められた
パターンで配置された逆反射ターゲット、カラーコード化ターゲット、ソーラー部の表面
またはその支持構造の固有の物理的フィーチャ、あるいは電磁信号または可聴信号を放出
する信号放出デバイスが含まれるが、それらに限らない。
定められた形状または検出された形状を利用すること、自然光式カメラを利用すること、
光または音声による距離検知システムを利用すること、あるいはソーラー部の表面の物理
的要素と相互作用するかまたはソーラー部の表面上の既知の位置によって放出される磁気
信号、電磁信号、または可聴信号を検出するプロービングシステムを利用することが含ま
れるが、それらに限らない。このプロービングシステムを使用して傾斜計をソーラー部の
表面の垂直ペデスタル軸上またはその近くに配置して垂直ペデスタル軸の非垂直を直接算
出してもよい。
求めるのに使用することのできるプロセスを示す。このプロセスは、図4に詳しく示すよ
うにステップ401〜405から始まる。ステップ701では、ロボットコントローラが
オンボード方位検出機構にアクセスして全地球座標系におけるロボットコントローラの方
位を検出してもよい。図5〜図6に示すように、これは、全地球座標系に対する較正ロボ
ットの方位を定めるオンボード加速度計およびコンパスによって実施されてもよい。
るのに使用されるオンボードセンサーに情報を要求できる(702)。次に、この情報を
、ソーラー部の表面の相対方位をロボットの検出された全地球方位に投影することによっ
て全地球座標系にマッピングできる(703)。次に、較正ロボットは、個々のソーラー
部の表面に関する方位データをオンボードデータ記憶ユニット、中央通信システム、また
は分散通信システムに伝達できる(704)。
かどうかを判定する(410)。較正する必要のあるソーラー部の表面がまだある場合、
プロセスはステップ401を繰り返す。すべてのヘリオスタットが較正された後、ロボッ
トコントローラはそのホーム位置またはドッキング位置に戻ることができる(411)。
ヘリオスタットのペデスタル軸の非垂直の特徴を調査するのに使用することのできるプロ
セスを示し、この垂直ユニットは、たとえばソフトウェアアルゴリズムの形をとってよい
。このプロセスは、図4に詳しく示すステップ401〜405および図7に示すステップ
701から始まる。ここで、ロボットコントローラの処理ユニットは、ソーラー部の表面
のペデスタル軸の相対方位を求めるのに使用されるオンボードセンサーに情報を要求でき
る(801)。次に、この情報を、ペデスタル軸相対方位をロボットの検出された全地球
方位に投影することによって全地球座標系にマッピングできる(802)。較正プロセス
の最後のステップとして、ロボットコントローラは、検出された全地球方位のオフセット
を既知の重力ベクトルまたは近似された重力ベクトルと比較してソーラー部の表面のペデ
スタル軸の非垂直を算出する(803)。
ードデータ記憶ユニット、中央通信システム、または分散通信システムに伝達できる(8
04)。較正プロセスが完了した後、較正ロボットは、較正すべきソーラー部の表面がま
だあるかどうかを判定する(410)。較正する必要のあるソーラー部の表面がまだある
場合、プロセスはステップ401を繰り返す。すべてのヘリオスタットが較正された後、
ロボットコントローラはそのホーム位置またはドッキング位置に戻ることができる(41
1)。
ロボットコントローラによって使用することのできる光ファイバーシステムを示す図であ
る。このシステムの実施例では、ロボットコントローラは光検知デバイス(901)を備
える必要がある。このデバイスは、狭帯域光学機器(902)、光ファイバケーブル(9
03)、および任意の光散乱光学機器(904)を備える光ファイバーシステム(905
)の出力を検知することができる。狭帯域光学機器は、軸外直射日光(off-axis direct
sunlight)がファイバケーブルに入射するのを防止し、必要に応じて事前に定めるかまた
は調整することのできる太陽半角範囲に対する感度を有する。光ファイバケーブルの目的
は、必要に応じてケーブルをルーティングすることができるので、狭帯域光学機器からの
データ、すなわち、光出力または光出力の欠如によりうまくアクセスできるようにするこ
とである。光散乱光学機器は、このデータにずっとうまくアクセスできるようにし、ロボ
ットコントローラの光検知デバイス(901)を光ファイバケーブルの端部の近くに配置
するのを不要にする。
することである。この情報は、ロボットコントローラの光検知デバイス(901)を監視
しつつソーラー部の表面の位置を同時に調整する探索アルゴリズムと一緒に閉ループ較正
技術として使用されてもよい。この情報を使用し、近似全地球位置および内部クロックを
利用して現在の太陽ベクトルを算出することによって、全地球座標系におけるソーラー部
の表面の方位を求めてもよい。
ローラによって使用することのできる電流監視システムの一実施例を示す。このシステム
の目的は、ソーラー部の表面が太陽に位置合わせされているかどうかを判定することであ
る。図9に示すように、この情報は、閉ループ較正技術で使用されるときまたは全地球座
標系におけるソーラー部の表面の方位を求めるときに有用である。電流監視システム(1
001)は、新しいシステム要素を必要としないので主としてPV適用例およびCPV適
用例で有用であるが、ヘリオスタット適用例で使用されてもよい。このシステムは、様々
な検知技術によってインバータ、ストリング、または個々のパネルレベルの光発電システ
ムまたは集光型光発電システムの瞬間出力を求めることができる。これらの技術には、プ
ロービングホール効果センサ(1003)を用いて、ワイヤ(1002)またはワイヤの
ループによって生成された磁界を測定することによる間接的な電流検知、電圧計および/
または電流計を光発電システムに物理的に挿入することによる直接的な電流検知、あるい
は瞬間電流出力情報をロボットコントローラ(104)に伝達することのできる外部計量
デバイスに接続することが含まれるが、それらに限らない。
によって使用することのできる光変調システムの一実施例を示す。このシステムの一目的
は、ソーラー部の表面に当たる人工光または自然光の量を変調しつつ、同時に、システム
の出力を測定することによって、個々のソーラー部の表面のステータスまたは全体的な最
盛状態を判定することである。光発電システムの統計的に有意な1つの要素が有効にオン
/オフに切り替えられる間システムレベルで電力出力変化が検出されない場合、前述のソ
ーラー部の表面が機能停止していると仮定してもよい。
ード指向性発光デバイス(1101)を使用してソーラー部の表面(101)に当たる光
の量を増大させる。発光デバイスがオフに切り替えられると、ソーラー部の表面に当たる
光の量が少なくなる。このシステムを日中に使用してもよい。ただし、変調信号は、シス
テムの基準電力出力がほぼ零になる夜間の方がより統計的に有意である。
適化するのに使用することのできるプロセスを示す。バックトラッキングアルゴリズムは
、非集光型PV適用例にのみ適用することができる。その理由は、バックトラッキングア
ルゴリズムでは、ソーラー部の表面を、陰になるのを避けるために太陽ベクトルから離れ
る方向に向ける必要がある。PVモジュールのある領域が陰になると、不均衡な電力損失
が生じる恐れがある。
り、個々のソーラー部の表面およびそのペデスタル軸の現在位置、方位、および非垂直を
求める(1201)。次いで、プロセス1201が、バックトラッキング分析の影響を受
ける可能性があるあらゆるソーラー部の表面について繰り返される(1202)。これら
のソーラー部の表面群を事前に定めるかあるいは事前にプログラミングしておいてもよい
。ロボットコントローラを使用して安全な領域を判定または検出してもよく、この場合、
安全なゾーンは、既知の現場構成または検出された現場構成が与えられた場合、第1のソ
ーラー部の表面が第2のソーラー部の表面の陰になることが不可能な場所として定義され
る。
(1203)。ソーラー部の表面が現在、a)互いに陰になっているか、それともb)互
いの陰になる容量を有するかを判定するには、ソーラー部の表面の形状および面積を定め
なければならない。ロボットコントローラは、オンボード視覚システムを使用して個々の
ソーラー部の表面の形状および面積を検出してもよく、あるいはこの情報を人間のオペレ
ータによって定めてもよい(1204)。ソーラー部の表面が隣接するソーラー部の表面
の陰になっているかどうかを判定するには、太陽ベクトルをシミュレーションする指向性
照明をソーラー部の表面の生成された3Dマップに適用すればよい(1205)。陰が検
出された場合、計算システムは、第1のソーラー部の表面が第2のソーラー部の表面の陰
になるのを防止する第1のソーラー部の表面の方位に必要な最小変更量を求めてもよい(
1206)。この計算プロセスをソーラー部の表面の将来の方位および将来の太陽ベクト
ル角度について繰り返し(1207)、ソーラー部の表面の領域における個々のソーラー
部の表面の最適な位置を事前に求めてもよい(1208)。
び経時的な土地環境の特徴を調査するのに使用することのできるプロセスを示す。製造プ
ロセスおよび設置プロセスにおける欠陥から生じるこれらの誤差は、ソーラー部の表面の
測定された方位および/または位置に関する情報を含む1組の履歴データポイントを、誤
差が存在しない場合に予測されるソーラー部の表面の方位および/または位置と比較する
ことによって定められてもよい。このプロセスは、図4、図7、および図8で説明したプ
ロセスを実行することから始まり、個々のソーラー部の表面およびそのペデスタル軸の現
在の位置、方位、および非垂直を求める(1201)。次いで、プロセス1201がソー
ラー部の表面について繰り返され、履歴データセットが作成される(1301)。ステッ
プ1302では、ソーラー部の表面の推定された方位および既知の太陽ベクトルも記録さ
れる。次いで、計算システムは、測定データ、予測データ、および既知のデータを比較し
、太陽の位置およびソーラー部の表面の予測された方位に対する誤差マップを作成する(
1303)。この誤差検出プロセスを使用して、許容誤差範囲から外れたソーラー部の表
面を検出してもよい。この誤差マップを使用し、較正ループを有効に閉じることによって
太陽追尾制御アルゴリズムまたはバックトラッキング制御アルゴリズムを微調整できる。
ト(1401)、分散処理ユニット(1402)、または他のロボットコントローラ(1
403)に伝達することのできるロボットコントローラ(104)の実施例を示す。代替
実施例では、ロボットコントローラは、1つまたは複数のソーラー部の表面に隣接してい
ないときでもそれらのソーラー部の表面と通信し、それらのソーラー部の表面から情報を
受け取ることができる。
細書で開示した厳密な構成および構成要素に限定されず、特許請求の範囲に記載された本
発明の趣旨および範囲から逸脱せずに本発明の方法および装置の構成、動作、および細部
に様々な修正、変更、および変形を施せることを理解されたい。
Claims (8)
- 太陽に対する複数のソーラー部の表面の方位を較正するためのシステムであって、
第1の支持構造に結合された前記複数のソーラー部の表面のうちの第1のソーラー部の表面と、
第2の支持構造に結合された前記複数のソーラー部の表面のうちの第2のソーラー部の表面と、を含み、前記第1の支持構造および第2の支持構造は、互いに分離され、
ロボットが、
当該ロボットを、前記第1のソーラー部の表面に隣接する第1の場所から、前記第1のソーラー部の表面及び前記第2のソーラー部の表面を分離する地形を横切って、前記第2のソーラー部の表面に隣接する第2の場所に案内するように動作可能なナビゲーションシステムと、
前記ロボットが前記第1の場所で位置決めされた場合、該第1のソーラー部の表面に関する第1の方位情報を識別し、前記ロボットが前記第2の場所で位置決めされた場合、該第2のソーラー部の表面に関する第2の方位情報を識別するための複数のセンサと、
前記ロボットが前記第1のソーラー部の表面に対応する場所で位置決めされた場合、前記識別した第1の方位情報に基づいて該第1のソーラー部の表面の方位を調整し、前記ロボットが前記第2のソーラー部の表面に対応する場所で位置決めされた場合、前記識別した第2の方位情報に基づいて該第2のソーラー部の表面の方位を調整するように動作可能な較正システムと、
を含むシステム。 - 前記複数のソーラー部の表面のうちの少なくとも一つは、少なくとも一つのPVモジュールである請求項1記載のシステム。
- 前記複数のソーラー部の表面は、太陽集光器である請求項1記載のシステム。
- 較正は、太陽を追い続けるように、または、太陽の入射放射線に対し垂直となるように太陽に対しPVモジュールの角度を調整することである請求項2記載のシステム。
- 較正は、目標に向って反射ビームを維持するように、太陽に対し太陽集光器の角度を調整することである請求項3記載のシステム。
- 前記ナビゲーションシステムは、地文航法システムである請求項1記載のシステム。
- 前記ナビゲーションシステムは、フライトによるナビゲーションシステムである請求項1記載のシステム。
- 第1の支持構造に結合された複数のソーラー部の表面のうちの第1のソーラー部の表面および第2の支持構造に結合された複数のソーラー部の表面のうちの第2のソーラー部の表面を含む、複数のソーラー部の表面の方位を太陽に対し較正をするための方法であって、前記第1の支持構造および第2の支持構造は、互いに分離され、
ロボットを前記第1のソーラー部の表面に隣接する第1の場所に位置決めし、
前記第1のソーラー部の表面及び前記第2のソーラー部の表面を分離する地形を横切って前記ロボットを案内することによって、前記ロボットを前記第2のソーラー部の表面に隣接する第2の場所に再位置決めし、
前記ロボットが前記第1の場所に位置決めされる場合、該第1のソーラー部の表面についての第1の方位情報を識別するとともに、前記ロボットが前記第2の場所に位置決めされる場合、該第2のソーラー部の表面についての第2の方位情報を識別し、
前記ロボットが前記第1のソーラー部の表面に対応する場所に位置決めされる場合、前記識別した第1の方位情報に基づいて該第1のソーラー部の表面の方位を調整するとともに、前記ロボットが前記第2のソーラー部の表面に対応する場所に位置決めされる場合、前記識別した第2の方位情報に基づいて該第2のソーラー部の方位を調整することを含む方法。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US41968510P | 2010-12-03 | 2010-12-03 | |
| US61/419,685 | 2010-12-03 | ||
| US13/118,274 | 2011-05-27 | ||
| US13/118,274 US8881720B2 (en) | 2010-05-28 | 2011-05-27 | Heliostat repositioning system and method |
| US13/182,297 | 2011-07-13 | ||
| US13/182,297 US20120012101A1 (en) | 2010-07-15 | 2011-07-13 | Robotic heliostat system and method of operation |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013542222A Division JP5846213B2 (ja) | 2010-12-03 | 2011-12-02 | ロボットヘリオスタットの較正システムおよび方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016053471A JP2016053471A (ja) | 2016-04-14 |
| JP6232032B2 true JP6232032B2 (ja) | 2017-11-15 |
Family
ID=46172299
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013542222A Active JP5846213B2 (ja) | 2010-12-03 | 2011-12-02 | ロボットヘリオスタットの較正システムおよび方法 |
| JP2015219709A Active JP6232032B2 (ja) | 2010-12-03 | 2015-11-09 | ロボットヘリオスタットの較正システムおよび方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013542222A Active JP5846213B2 (ja) | 2010-12-03 | 2011-12-02 | ロボットヘリオスタットの較正システムおよび方法 |
Country Status (8)
| Country | Link |
|---|---|
| EP (1) | EP2646759B1 (ja) |
| JP (2) | JP5846213B2 (ja) |
| CN (1) | CN103328907B (ja) |
| AU (1) | AU2011336375B2 (ja) |
| BR (1) | BR112013013406A2 (ja) |
| CA (1) | CA2819243A1 (ja) |
| MX (1) | MX2013006243A (ja) |
| WO (1) | WO2012075437A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3015650A1 (fr) * | 2013-12-20 | 2015-06-26 | Amaterrasu | Dispositif de positionnement d'une paroi solaire et systeme de captation de l'energie solaire comprenant un tel dispositif |
| DE102014214889A1 (de) * | 2014-07-29 | 2016-02-04 | Kuka Roboter Gmbh | Fahrerloses Transportfahrzeug und Verfahren zum Betreiben eines fahrerlosen Transportfahrzeugs |
| CN105157255B (zh) * | 2015-09-25 | 2017-03-22 | 常州龙腾光热科技股份有限公司 | 菲涅尔式反光镜组装置的逐日跟踪控制系统及其控制方法 |
| CN108413987B (zh) * | 2018-03-13 | 2021-03-26 | 深圳中科能投能源有限公司 | 一种定日镜的校准方法、装置及系统 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6680693B2 (en) * | 2002-03-07 | 2004-01-20 | The University Of Southern Mississippi | Method and apparatus for automatically tracking the sun with an object |
| US7890235B2 (en) * | 2005-05-27 | 2011-02-15 | The Charles Machine Works, Inc. | Determination of remote control operator position |
| DE102006053758A1 (de) * | 2006-11-13 | 2008-05-15 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zur Regelung der Ausrichtung eines Heliostaten auf einen Receiver, Heliostatenvorrichtung und Solarkraftwerk |
| PE20090843A1 (es) * | 2007-07-10 | 2009-07-24 | Trevijano Jose Javier Alejo | Concentrador de energia solar y proceso de montaje |
| JP4541395B2 (ja) * | 2007-10-31 | 2010-09-08 | 三井造船株式会社 | 太陽光追尾センサの方位設定方法 |
| JP4564553B2 (ja) * | 2008-06-27 | 2010-10-20 | 三井造船株式会社 | ヘリオスタットの校正方法とその校正装置 |
| WO2010017415A2 (en) * | 2008-08-06 | 2010-02-11 | Esolar, Inc. | Camera-based heliostat calibration with artificial light sources |
| PT2161516E (pt) * | 2008-09-03 | 2012-01-12 | Novatec Solar Gmbh | Sistema térmico solar |
| JP5192946B2 (ja) * | 2008-09-04 | 2013-05-08 | 川崎重工業株式会社 | 太陽熱発電設備における集光装置のクリーニング装置 |
| US8437875B2 (en) * | 2008-10-27 | 2013-05-07 | Eusebio Guillermo Hernandez | Outdoor home cleaning robot |
| US20100139644A1 (en) * | 2008-10-29 | 2010-06-10 | Brightsource Industries (Israel), Ltd. | Heliostat calibration |
| WO2010083292A1 (en) * | 2009-01-14 | 2010-07-22 | Skyfuel, Inc. | Apparatus and method for building linear solar collectors directly from rolls of reflective laminate material |
| US8449692B2 (en) * | 2009-02-13 | 2013-05-28 | Esolar, Inc. | Heliostat field cleaning system |
| EP2577183B1 (en) * | 2010-05-28 | 2018-10-10 | SolarCity Corporation | Heliostat repositioning system |
| CN103119380B (zh) * | 2010-07-15 | 2015-07-15 | 克博蒂克斯公司 | 机器人定日镜系统和操作方法 |
-
2011
- 2011-12-02 WO PCT/US2011/063144 patent/WO2012075437A1/en not_active Ceased
- 2011-12-02 AU AU2011336375A patent/AU2011336375B2/en active Active
- 2011-12-02 JP JP2013542222A patent/JP5846213B2/ja active Active
- 2011-12-02 BR BR112013013406A patent/BR112013013406A2/pt not_active IP Right Cessation
- 2011-12-02 EP EP11845329.9A patent/EP2646759B1/en active Active
- 2011-12-02 MX MX2013006243A patent/MX2013006243A/es active IP Right Grant
- 2011-12-02 CA CA2819243A patent/CA2819243A1/en not_active Abandoned
- 2011-12-02 CN CN201180065102.6A patent/CN103328907B/zh active Active
-
2015
- 2015-11-09 JP JP2015219709A patent/JP6232032B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP5846213B2 (ja) | 2016-01-20 |
| BR112013013406A2 (pt) | 2016-09-06 |
| WO2012075437A8 (en) | 2013-06-20 |
| JP2013544346A (ja) | 2013-12-12 |
| CN103328907B (zh) | 2015-09-09 |
| WO2012075437A1 (en) | 2012-06-07 |
| EP2646759B1 (en) | 2018-01-31 |
| AU2011336375A1 (en) | 2013-06-13 |
| AU2011336375B2 (en) | 2017-03-30 |
| JP2016053471A (ja) | 2016-04-14 |
| MX2013006243A (es) | 2013-08-01 |
| EP2646759A4 (en) | 2015-02-25 |
| CA2819243A1 (en) | 2012-06-07 |
| EP2646759A1 (en) | 2013-10-09 |
| CN103328907A (zh) | 2013-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10520223B2 (en) | Robotic heliostat calibration system and method | |
| CA2539903C (en) | Method and system for determining the spatial position of a hand-held measuring appliance | |
| CN101063610B (zh) | 工程变形自动监测系统 | |
| CN101903818B (zh) | 安装姿势测定装置 | |
| US8801188B2 (en) | Method for aligning the heliostats of a heliostat field | |
| JP6232032B2 (ja) | ロボットヘリオスタットの較正システムおよび方法 | |
| CN105026886B (zh) | 跟踪器单元和跟踪器单元中的方法 | |
| CN105157697A (zh) | 基于光电扫描的室内移动机器人位姿测量系统及测量方法 | |
| CN103959035A (zh) | 用于定位在空中监测抛物面反射器的设备的方法和系统 | |
| CN109100733B (zh) | 激光雷达设备误差检测设备、方法及装置 | |
| CN102354224B (zh) | 基于人造光源的日光反射装置校正系统及校正方法 | |
| Prorok et al. | Indoor navigation research with the Khepera III mobile robot: An experimental baseline with a case-study on ultra-wideband positioning | |
| CN108120474A (zh) | 一种接触网接触线测量方法及装置 | |
| CN104697489A (zh) | 一种平面法线方位角测量装置、方法及应用 | |
| CN115902845A (zh) | 激光雷达的外参标定方法及相关装置 | |
| CN120101054A (zh) | 一种智能化地面移动高精度燃气泄漏巡检与源头追踪系统 | |
| Csaba et al. | Differences between Kinect and structured lighting sensor in robot navigation | |
| CN105572682A (zh) | 一种井下空间测距方法及装置 | |
| KR100836870B1 (ko) | 광센서를 이용한 원통형 태양추적장치 및 이를 이용한태양전지 구동 시스템 | |
| CN111670675A (zh) | 一种基于太阳偏振光定位的割草机系统及割草方法 | |
| JP4649284B2 (ja) | 風速計測方法及び装置 | |
| CN114279450B (zh) | 一种激光定位导航系统及其定位方法 | |
| US10751875B2 (en) | Rotatable mobile robot for mapping an area and a method for mapping the same | |
| CN204575052U (zh) | 一种平面法线方位角测量装置 | |
| CN221698864U (zh) | 一种基于融合导航的全向移动机器人基座装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160208 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160824 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170922 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171020 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6232032 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |