JP6224496B2 - 画像診断装置及びその作動方法 - Google Patents
画像診断装置及びその作動方法 Download PDFInfo
- Publication number
- JP6224496B2 JP6224496B2 JP2014058096A JP2014058096A JP6224496B2 JP 6224496 B2 JP6224496 B2 JP 6224496B2 JP 2014058096 A JP2014058096 A JP 2014058096A JP 2014058096 A JP2014058096 A JP 2014058096A JP 6224496 B2 JP6224496 B2 JP 6224496B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- sensitivity
- image
- catheter
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
- Endoscopes (AREA)
Description
光送受信部を先端近傍に回転自在に収納したカテーテルを用いて、血管内の断面画像を再構成する光干渉を利用した画像診断装置であって、
光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析手段と、
該解析手段によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出手段とを有し、
前記解析手段は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出手段を含み、
前記算出手段は、前記検出手段で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出することを特徴とする。
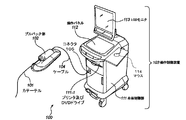
図1は、本発明の一実施の形態に係わる光断層像診断装置(以下、単に画像診断装置)100の全体構成の一例を示す図である。なお、実施形態では波長掃引光源を利用する装置を例にするが、単一波長光源を用いる装置に適用できるので、波長掃引光源を利用するのはあくまで一例であると認識されたい。
感度(dB)={光路差0におけるSNR(dB)}−{Sampleの反射率(dB)}…(1)
ここで、「sampleの反射率」とは、反射物を用いた場合に算出できる「10・log(反射光量(mW)/出力光量(mW))」で算出される値(dB)である。実施形態では、カテーテルシース410の内側面410aと外側面410bの間は、血液、水、空気などは含まない、樹脂であり、かつ、その部分の反射率は既知(固定)と見なせることに着目し、ここで言う「Sample」として好適であると考えた。「光路差0におけるSNR」は、このSample(シース410の素材内部)における実測の反射光の強度から、バックグラウンドノイズレベルを減じることで求めることができる。バックグランドノイズレベルは、「Sample」を測定した際と同じ状況下での、媒体に依存しない部分の信号を用いることが望ましい。発明者は、回転中心から光送受信部412のレンズの表面412aまでの「反射光」として検出された信号をバックグラウンドノイズと見なせると考えた。
S(dB)={光路差0におけるSNR(dB)}−{Sampleの反射率(dB)}
={SA-SB}−{C} …(2)
上式(2)において「C」は既知であり、外部記憶装置210に予め格納された値である。また、値SA,SBが、現実の干渉光データから導出した実測値である。そして、上記の式で得られた感度Sが、専用の感度検査装置と同じ精度ではないものの、一般の利用者にとっては、感度を表す指標値として十分な精度を有することを確かめた。
[例1] ステップS602にて算出した感度に基づき、波長掃引光源203の出力、又は、参照光(通常は絞り調整で実現している)の出力を調整する。その調整の下で感度を補正する。そして、補正後の感度が、補正可能な範囲を超えている場合、もはや感度を調整できないことを意味するので、その旨を報知する。
[例2] ステップS602にて算出した感度に基づき、干渉光データのゲイン、又はダイナミックレンジを調整する。そして、その調整の下で感度を補正する。そして、補正後の感度が、補正可能な範囲を超えている場合、もはや感度を調整できないことを意味するので、その旨を報知する。
Claims (11)
- 光送受信部を先端近傍に回転自在に収納したカテーテルを用いて、血管内の断面画像を再構成する光干渉を利用した画像診断装置であって、
光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析手段と、
該解析手段によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出手段とを有し、
前記解析手段は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出手段を含み、
前記算出手段は、前記検出手段で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出する
ことを特徴とする画像診断装置。 - 前記検出手段は、前記ラインデータにおける回転中心位置から3つのピークを検出し、第2、第3のピークの中間に位置するデータを前記第1のデータ、前記回転中心位置から第1のピークまでのデータを前記第2のデータとして検出することを特徴とする請求項1に記載の画像診断装置。
- 前記検出手段は、前記画像診断装置のキャリブレーション処理時に実行されることを特徴とする請求項1又は2に記載の画像診断装置。
- 前記算出手段で算出した感度が予め設定した許容範囲内にあるか否かを判定し、当該許容範囲外にある場合に異常として判定する判定手段とを更に有することを特徴とする請求項1乃至3のいずれか1項に記載の画像診断装置。
- 前記算出手段で算出した感度と、当該算出手段で算出した日時とを関連付けてログ情報として蓄積する蓄積手段を更に有することを特徴とする請求項1乃至4のいずれか1項に記載の画像診断装置。
- 前記ログ情報に基づき、予め設定した許容範囲外になる時期を予測する予測手段と、
該予測手段で予測した時期を報知する報知手段と
を更に有することを特徴とする請求項5に記載の画像診断装置。 - 前記報知手段が、前記予測した時期が、次回メンテナンス時期より現在に近い将来である場合に報知処理を実行することを特徴とする請求項6に記載の画像診断装置。
- 前記算出手段で算出した感度を補正する補正手段を更に有することを特徴とする請求項1乃至7のいずれか1項に記載の画像診断装置。
- 光送受信部を先端近傍に回転自在に収納したカテーテルを用いて、血管内の断面画像を再構成する光干渉を利用した画像診断装置の作動方法であって、
解析手段が、光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析工程と、
算出手段が、該解析工程によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出工程とを有し、
前記解析工程は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出工程を含み、
前記算出工程では、前記検出工程で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出する
ことを特徴とする画像診断装置の作動方法。 - コンピュータに読み込ませ実行させることで、前記コンピュータに請求項9に記載の方法の各工程を実行させるためのプログラム。
- 請求項10に記載のプログラムを格納した、コンピュータが読み取り可能な記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014058096A JP6224496B2 (ja) | 2014-03-20 | 2014-03-20 | 画像診断装置及びその作動方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014058096A JP6224496B2 (ja) | 2014-03-20 | 2014-03-20 | 画像診断装置及びその作動方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015181533A JP2015181533A (ja) | 2015-10-22 |
| JP6224496B2 true JP6224496B2 (ja) | 2017-11-01 |
Family
ID=54348833
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014058096A Active JP6224496B2 (ja) | 2014-03-20 | 2014-03-20 | 画像診断装置及びその作動方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6224496B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2025013662A1 (ja) * | 2023-07-11 | 2025-01-16 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0899452A (ja) * | 1994-09-30 | 1996-04-16 | Ricoh Co Ltd | 画像処理装置 |
| JPH08174226A (ja) * | 1994-12-28 | 1996-07-09 | Kawasaki Steel Corp | 鋼板の溶接装置 |
| US20090015842A1 (en) * | 2005-03-21 | 2009-01-15 | Rainer Leitgeb | Phase Sensitive Fourier Domain Optical Coherence Tomography |
| JP5524947B2 (ja) * | 2009-02-24 | 2014-06-18 | テルモ株式会社 | 画像診断装置及びその作動方法 |
-
2014
- 2014-03-20 JP JP2014058096A patent/JP6224496B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015181533A (ja) | 2015-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2407107B1 (en) | Diagnostic imaging device | |
| JP4768494B2 (ja) | 画像診断装置およびその処理方法 | |
| JP5485760B2 (ja) | 光干渉断層像形成装置及びその制御方法 | |
| JP6059334B2 (ja) | 画像診断装置及び情報処理装置及びそれらの作動方法、プログラム及びコンピュータ可読記憶媒体 | |
| JP5524947B2 (ja) | 画像診断装置及びその作動方法 | |
| JP6105740B2 (ja) | 画像診断装置及びその作動方法 | |
| JP6437440B2 (ja) | 画像診断装置及びその作動方法、プログラム及びコンピュータ可読記憶媒体 | |
| US20120215091A1 (en) | Imaging apparatus for diagnosis and control method thereof | |
| JPWO2018061780A1 (ja) | 制御装置、画像診断装置、制御装置の処理方法およびプログラム | |
| JP5628785B2 (ja) | 画像診断装置 | |
| JP2016174809A (ja) | 画像診断装置、その制御方法、プログラム及びコンピュータ可読記憶媒体 | |
| US20140240713A1 (en) | Apparatuses and methods for imaging inside a vessel | |
| US20170014100A1 (en) | Control device, operation method thereof and diagnosis system | |
| US11129592B2 (en) | Image diagnostic apparatus and method and program | |
| JP6062421B2 (ja) | 画像診断装置及びその作動方法 | |
| JP6437920B2 (ja) | 画像診断装置 | |
| JP6224496B2 (ja) | 画像診断装置及びその作動方法 | |
| JPWO2016136579A1 (ja) | 画像診断装置、その作動方法、プログラム及びコンピュータ可読記憶媒体 | |
| JP5399844B2 (ja) | 画像診断装置及びその作動方法 | |
| JP2015066056A (ja) | 画像診断装置及びその制御方法、並びに画像診断装置に用いられる光干渉用プローブ | |
| JP6584806B2 (ja) | 画像診断装置及びその制御方法、プログラム及びコンピュータ可読記憶媒体 | |
| JP2018153563A (ja) | 断層像撮影装置およびその制御方法 | |
| JP2015181701A (ja) | 画像診断装置及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170731 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6224496 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |