JP6224496B2 - Diagnostic imaging apparatus and operating method thereof - Google Patents
Diagnostic imaging apparatus and operating method thereof Download PDFInfo
- Publication number
- JP6224496B2 JP6224496B2 JP2014058096A JP2014058096A JP6224496B2 JP 6224496 B2 JP6224496 B2 JP 6224496B2 JP 2014058096 A JP2014058096 A JP 2014058096A JP 2014058096 A JP2014058096 A JP 2014058096A JP 6224496 B2 JP6224496 B2 JP 6224496B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- sensitivity
- image
- catheter
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002059 diagnostic imaging Methods 0.000 title claims description 23
- 238000011017 operating method Methods 0.000 title description 2
- 230000035945 sensitivity Effects 0.000 claims description 64
- 230000003287 optical effect Effects 0.000 claims description 62
- 238000000034 method Methods 0.000 claims description 30
- 230000005540 biological transmission Effects 0.000 claims description 19
- 238000003384 imaging method Methods 0.000 claims description 18
- 210000004204 blood vessel Anatomy 0.000 claims description 16
- 238000004458 analytical method Methods 0.000 claims description 13
- 238000004364 calculation method Methods 0.000 claims description 12
- 238000003860 storage Methods 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 7
- 238000003745 diagnosis Methods 0.000 claims description 6
- 238000012423 maintenance Methods 0.000 claims description 3
- 230000002159 abnormal effect Effects 0.000 claims 1
- 239000000835 fiber Substances 0.000 description 27
- 238000012545 processing Methods 0.000 description 25
- 244000208734 Pisonia aculeata Species 0.000 description 16
- 239000013307 optical fiber Substances 0.000 description 13
- 238000005259 measurement Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 238000007689 inspection Methods 0.000 description 7
- 238000012014 optical coherence tomography Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 230000002792 vascular Effects 0.000 description 2
- 208000007479 Orofaciodigital syndrome type 1 Diseases 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 210000004351 coronary vessel Anatomy 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000002789 length control Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 201000003455 orofaciodigital syndrome I Diseases 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images





Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
- Endoscopes (AREA)
Description
本発明は画像診断装置及びその作動方法に関するものである。 The present invention relates to an image diagnostic apparatus and an operating method thereof.
血管内腔の画像を取得する装置として、光の送受信を行うイメージングコアを先端部に回転自在に且つ軸方向に移動自在に収容したカテーテルを用いる光干渉断層診断装置(OCT:Optical Coherence Tomography)等がある。また、OCTの改良型として、波長掃引を利用した光干渉断層診断装置(SS−OCT:Swept-source Optical coherence Tomography)も開発されている(特許文献1)。以下、これらを総称して画像診断装置という。 An optical coherence tomography (OCT: Optical Coherence Tomography) using a catheter in which an imaging core that transmits and receives light is rotatably accommodated at the distal end and is movable in the axial direction is used as an apparatus for acquiring an image of a blood vessel lumen. There is. Further, as an improved type of OCT, an optical coherence tomography (SS-OCT) using wavelength sweep has been developed (Patent Document 1). Hereinafter, these are collectively referred to as an image diagnostic apparatus.
画像診断装置の製造の最終工程では、その装置の感度検査が行われる。一般には、カテーテルを介在させず、かつ、専用の測定装置を用いて、測定光を既知の反射光が得られる対象物(通常はミラー)に光を当てて、その反射光の強度を検出することで、画像診断装置の感度を算出する。この工程で算出した感度が予め設定された許容範囲から外れる場合、その装置には何らかの異常があるものとし、再度の検査工程を経て部品の交換工程まで遡ることになる。 In the final process of manufacturing the diagnostic imaging apparatus, sensitivity inspection of the apparatus is performed. In general, the intensity of the reflected light is detected by directing the measurement light to an object (usually a mirror) from which a known reflected light is obtained without using a catheter and using a dedicated measuring device. Thus, the sensitivity of the diagnostic imaging apparatus is calculated. If the sensitivity calculated in this step deviates from the preset allowable range, it is assumed that there is some abnormality in the device, and the process goes back to the part replacement step through a second inspection step.
上記の通りなので、一般に医療機関で利用される画像診断装置は、少なくとも感度検査にパスしたものとなるわけであるが、その一方で、経年劣化、特に光源の出力の低下が要因で感度が次第に低下することが起こり得る。また、何らかの強い衝撃を受けてファイバの一部や接合部等の光路が破損した場合には一気に下がることも起こり得る。感度が一気に低下した場合には、それまでに得られた血管断面画像との対比一目瞭然であるといえるが、経年劣化や破損の程度が小さい場合には、得られる血管断面画像が全体的に暗くなる程度であり、熟練者と言えどもそれに気づくことは難しい。また、光源の調整位置から微小な変動や、参照光の出力変化に伴い、感度が上昇してしまうこともある。 As described above, an image diagnostic apparatus generally used in a medical institution is one that has passed at least the sensitivity test. On the other hand, the sensitivity gradually increases due to deterioration over time, particularly the decrease in the output of the light source. It can happen to decline. In addition, when an optical path such as a part of a fiber or a joint is damaged due to some strong impact, the fiber may drop at a stroke. If the sensitivity decreases at a stroke, it can be said that it is obvious at a glance compared to the blood vessel cross-sectional images obtained so far. However, if the degree of aging or damage is small, the resulting blood vessel cross-sectional image is dark overall. It is hard to notice it even if you are an expert. In addition, the sensitivity may increase with a slight change from the adjustment position of the light source or a change in the output of the reference light.
本発明は上記問題点に鑑みなされたものであり、特別な装置を用意することなく、画像診断装置を利用する側の環境内で簡易的に感度を測定する技術を提供しようとするものである。 The present invention has been made in view of the above problems, and it is an object of the present invention to provide a technique for easily measuring sensitivity in an environment on the side of using an image diagnostic apparatus without preparing a special apparatus. .
上記課題を解決するため、例えば本発明の画像診断装置は以下の構成を有する。すなわち、
光送受信部を先端近傍に回転自在に収納したカテーテルを用いて、血管内の断面画像を再構成する光干渉を利用した画像診断装置であって、
光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析手段と、
該解析手段によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出手段とを有し、
前記解析手段は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出手段を含み、
前記算出手段は、前記検出手段で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出することを特徴とする。
In order to solve the above problems, for example, an image diagnostic apparatus of the present invention has the following configuration. That is,
An image diagnostic apparatus using optical interference that reconstructs a cross-sectional image in a blood vessel using a catheter in which an optical transmission / reception unit is rotatably accommodated near the tip,
An analysis means for analyzing line data obtained by performing Fourier transform on optical interference data;
Based on the analysis result of the line data by said analysis means, have a calculation means for calculating the sensitivity of the diagnostic imaging apparatus,
The analysis means includes, based on the line data, first data between an inner surface and an outer surface of the sheath of the catheter, and a second data between a rotation center position of the optical transmission / reception unit and a lens surface of the optical transmission / reception unit. Including detection means for detecting data;
The calculating means calculates the sensitivity of the diagnostic imaging apparatus based on the first and second data obtained by the detecting means .
本発明によれば、特別な装置を用意することなく、画像診断装置を利用する側の環境内で簡易的に感度を測定することが可能になる。 According to the present invention, it is possible to easily measure the sensitivity within the environment on the side using the diagnostic imaging apparatus without preparing a special apparatus.
以下、本発明に係る実施の形態について添付図面を参照して詳細に説明する。 Embodiments according to the present invention will be described below in detail with reference to the accompanying drawings.
[第1の実施形態]
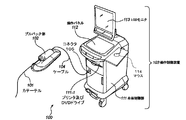
図1は、本発明の一実施の形態に係わる光断層像診断装置(以下、単に画像診断装置)100の全体構成の一例を示す図である。なお、実施形態では波長掃引光源を利用する装置を例にするが、単一波長光源を用いる装置に適用できるので、波長掃引光源を利用するのはあくまで一例であると認識されたい。
[First Embodiment]
FIG. 1 is a diagram showing an example of the overall configuration of an optical tomographic image diagnostic apparatus (hereinafter simply referred to as an image diagnostic apparatus) 100 according to an embodiment of the present invention. In the embodiment, an apparatus using a wavelength swept light source is taken as an example. However, since it can be applied to an apparatus using a single wavelength light source, it should be recognized that the use of a wavelength swept light source is merely an example.
画像診断装置100は、カテーテル101と、プルバック部102と、操作制御装置103で構成され、プルバック部102と操作制御装置103は、コネクタ105を介してケーブル104で接続されている。このケーブル104には、光ファイバ、並びに各種信号線が収容されている。
The
カテーテル101は、光ファイバを回転自在に収容する。この光ファイバの先端には、操作制御装置100からプルバック部102を介在して伝送された光(測定光)を、光ファイバの中心軸に対してほぼ直行する方向に送信するとともに、送信した光の外部からの反射光を受信するための光送受信部を有するイメージングコアが設けられている。
The
プルバック部102は、カテーテル101に設けられたアダプタを介して、カテーテル101内の光ファイバを保持する。そして、プルバック部102に内蔵されたモータを駆動させることでカテーテル101内の光ファイバを回転させることで、その先端に設けられたイメージングコアを回転させることが可能になっている。また、プルバック部102は、内蔵の直線駆動部に設けられたモータを駆動して、カテーテル101内の光ファイバを所定速度で引っ張る(プルバック部と呼ばれる所以である)処理も行う。
The
上記構成により、カテーテル101を患者の血管内に案内し、プルバック部102に内蔵したラジアル走査モータ(図2の符号241)を駆動して、カテーテル101内の光ファイバを回転させることで、血管内の内腔面を360度に渡ってスキャンすることが可能になる。さらに、プルバック部102がカテーテル101内の光ファイバを所定速度で引っ張ることで、血管軸に沿ったスキャンが行われる。これによって、血管の内側から見た、血管軸に沿った断層像を複数枚得ることができ、それらを接続して3次元の血管像を再構成することも可能となる。
With the above-described configuration, the
操作制御装置103は、画像診断装置100の動作を統括制御する機能を有する。操作制御装置103は、例えば、ユーザ(医師)指示に基づく各種設定値を装置内に入力する機能や、測定により得られたデータを処理し、体腔内の断層画像として表示する機能を備える。
The
操作制御装置103には、本体制御部111、プリンタ/DVDドライブ111−1、操作パネル112及びLCDモニタ113、等が設けられている。本体制御部111は、光断層画像を生成する。光断層画像は、測定により得られた反射光と光源からの光を分離することで得られた参照光とを干渉させることで干渉光データを生成するとともに、当該干渉光データに基づいて生成されたラインデータを処理することにより生成される。
The
プリンタ/DVDドライブ111−1は、本体制御部111における処理結果を印刷したり、データとして記憶したりする。操作パネル112は、ユーザが各種設定値及び指示の入力を行うユーザーインターフェースである。LCDモニタ113は、表示装置として機能し、例えば、本体制御部111において生成された断層画像を表示する。114は、ポインティングデバイス(座標入力装置)としてのマウスである。
The printer / DVD drive 111-1 prints the processing result in the main body control unit 111 or stores it as data. The operation panel 112 is a user interface through which a user inputs various setting values and instructions. The
次に、画像診断装置100の機能構成について説明する。図2は、画像診断装置100のブロック構成図である。以下、同図を用いて波長掃引型、画像診断装置の機能構成について説明する。
Next, the functional configuration of the
図中、201は画像診断装置の全体の制御を司る信号処理部であり、マイクロプロセッサをはじめ、いくつかの回路で構成される。202は信号処理部201内に設けられたメモリ(RAM)である。210は、信号処理部201が実行するためのプログラムや各種データ(後述のテーブル、屈折率を算出する複数のプログラムを含む)を格納している外部記憶装置であり、典型的にはハードディスクである。203は波長掃引光源であり、異なる波長の光を時間掃引する。
In the figure,
波長掃引光源203から出力された光は、第1のシングルモードファイバ271の一端に入射され、先端側に向けて伝送される。第1のシングルモードファイバ271は、途中の光ファイバカップラ272において第4のシングルモードファイバ275と光学的に結合されている。
The light output from the wavelength swept
第1のシングルモードファイバ271における光ファイバカップラ272より先端側に発した光は、コネクタ105を介して、第2のシングルモードファイバ273に導かれる。この第2のシングルモードファイバ273の他端はプルバック部102内の光ロータリージョイント230に接続されている。
The light emitted from the
一方、カテーテル101はプルバック部102と接続するためのアダプタ101aを有する。そして、このアダプタ101aによりカテーテル101をプルバック部102に接続することで、カテーテル101が安定してプルバック部102に保持される。さらに、カテーテル101内に回転自在に収容された第3のシングルモードファイバ274の端部が、光ロータリージョイント230に接続される。この結果、第2のシングルモードファイバ273と第3のシングルモードファイバが光学的に結合される。第3のシングルモードファイバ274の他方端(カテーテル101の先頭部分側)には、光を回転軸に対してほぼ直行する方向に出射するミラーとレンズを搭載したイメージングコア250が設けられている。
On the other hand, the
上記の結果、波長掃引光源203が発した光は、第1のシングルモードファイバ271、第2のシングルモードファイバ273、第3のシングルモードファイバ274を介して、第3のシングルモードファイバ274の端部に設けられたイメージングコア250に導かれる。イメージングコア250は、この光を、ファイバの軸に直行する方向に出射するとともに、その反射光を受信し、その受信した反射光が今度は逆に導かれ、操作制御装置103に返される。
As a result, the light emitted from the wavelength swept
一方、光ファイバカップラ272に結合された第4のシングルモードファイバ275の反対の端部には、参照光の光路長を微調整する光路長調整機構220が設けられている。この光路長可変機構220は、カテーテル101を交換して使用した場合の個々のカテーテル101の長さのばらつきを吸収できるよう、その長さのばらつきに相当する光路長を変化させる光路長変更手段として機能する。そのため、第4のシングルモードファイバ275に端部に位置するコリメートレンズ225が、その光軸方向である矢印226で示すように移動自在な1軸ステージ224上に設けられている。
On the other hand, an optical path
具体的には、1軸ステージ224はカテーテル101を交換した場合に、カテーテル101の光路長のばらつきを吸収できるだけの光路長の可変範囲を有する光路長変更手段として機能する。さらに、1軸ステージ224はオフセットを調整する調整手段としての機能も備えている。例えば、カテーテル101の先端が生体組織の表面に密着していない場合でも、1軸ステージにより光路長を微小変化させることにより、生体組織の表面位置からの反射光と干渉させる状態に設定することが可能である。
Specifically, when the
1軸ステージ224で光路長が微調整され、グレーティング221、レンズ222を介してミラー223にて反射された光は再び第4のシングルモードファイバ275に導かれ、光ファイバカップラ272にて、第1のシングルモードファイバ271側から得られた光と混合されて、干渉光としてフォトダイオード204(以下、PD)にて受光される。
The optical path length is finely adjusted by the
このようにしてPD204にて受光された干渉光は光電変換され、アンプ205により増幅された後、復調器206に入力される。この復調器206では干渉した光の信号部分のみを抽出する復調処理を行い、その出力は干渉光信号としてA/D変換器207に入力される。
The interference light received by the
A/D変換器207では、干渉光信号を例えば45MHzで1024ポイント分サンプリングして、1ラインのデジタルデータ(干渉光データ)を生成する。なお、サンプリング周波数を45MHzとしたのは、波長掃引の繰り返し周波数を40kHzにした場合に、波長掃引の周期(25μsec)の90%程度を1024点のデジタルデータとして抽出することを前提としたものであり、特にこれに限定されるものではない。
The A /
A/D変換器207にて生成されたライン単位の干渉光データは、信号処理部201に入力され、一旦、メモリ202に格納される。そして、信号処理部201では干渉光データをFFT(高速フーリエ変換)により周波数分解して深さ方向のデータ(ラインデータ)を生成し、これを座標変換することにより、血管内の各位置での光断面画像を構築し、所定のフレームレートでLCDモニタ113に出力する。
The line-by-line interference light data generated by the A /
信号処理部201は、更に光路長調整用駆動部209、通信部208と接続されている。信号処理部201は光路長調整用駆動部209を介して1軸ステージ224の位置の制御(光路長制御)を行う。
The
通信部208は、いくつかの駆動回路を内蔵するとともに、信号処理部201の制御下にてプルバック部102と通信する。具体的には、プルバック部102内の光ロータリージョイント230による第3のシングルモードファイバの回転を行うためのラジアル走査モータ241への駆動信号の供給、ラジアル走査モータの回転位置を検出するためのエンコーダ部242からの信号受信、並びに、第3のシングルモードファイバ284の所定速度で引っ張るための直線駆動部243への駆動信号の供給である。
The
なお、信号処理部201における上記処理も、所定のプログラムがコンピュータによって実行されることで実現されるものとする。
Note that the above processing in the
図4はカテーテル101の先端近傍の断面構造図である。カテーテル101は、透明な部材で構成されるカテーテルシース410で構成され、かつ、その内部には、回転自在で、かつ、カテーテル101の軸に沿って移動可能なイメージングコア250を収容している。このイメージングコア250は、光送受信部512と、それを収容するハウジング411で構成される。また、このハウジング413は駆動シャフト414に支持される。駆動シャフト414は柔軟で、かつ回転をよく伝送できる特性の素材であり、例えば、ステンレス等の金属により構成されている。そして、駆動シャフト414の内部には第3のシングルモードファイバ274が収容されている。また、ハウジング411は円筒状の金属パイプの一部に切り欠き部を有する。光送受信部412は、その切欠き部を介して光の送信と受信を行うことになる。
FIG. 4 is a cross-sectional view of the vicinity of the distal end of the
光送受信部412は、第3のシングルモードファイバ274の端部に設けられ、同図の垂直面に対し球体を略45度の角度で切った半球体形状を成し、その傾斜面にはミラー部が形成されている。また、この光送受信部412は半球体形状を有することで、レンズの機能を兼ね備えている。第3のシングルモードファイバ274を介して供給された光は、このミラー部で反射され、図示の矢印472aに沿って血管組織に向けて出射される。スキャン時には血管内での出射となる。光送受信部412は、図示の矢印472bで示される血管組織からの反射光を受信し、ミラー部で反射して、第3のシングルモードファイバ274にその反射光を返すことになる。
The optical transmission /
上記構成において、カテーテル101の先端を、患者の診断対象の患部(冠動脈)に位置させるまで挿入すると、ユーザは、不図示のガイディングカテーテルを介してフラッシュ液を、ガイディングカテーテルの先端から放出する操作を行う。そして、操作パネル112を走査して、スキャン開始を指示入力することになる。この指示入力を検出すると、信号処理部201は、波長掃引光源232を駆動して光を発生させ、測定光をイメージングコア250内の光送受信部412に供給する。さらに、信号処理部201は、プルバック部102内のラジアル走査モータ241、直線駆動部243を駆動してスキャン処理(イメージングコア250を回転させると共に、所定速度で引っ張る処理)を行う。この結果、メモリ202には、光干渉データが格納されていき、設定したフラッシュ液の屈折率をパラメータとして用いて、血管断層像の再構成処理が行われることになる。
In the above configuration, when the distal end of the
ここで、1枚の光断面画像の生成にかかる処理を図3を用いて説明する。同図はイメージングコア250が位置する血管301の断面画像の再構成処理を説明するための図である。イメージングコア250は1回転(360度)する間に、複数回の測定光の送信と受信を行う。1回の光の送受信により、その光を照射した方向の1ラインのデータを得ることができる。従って、1回転の間に、例えば512回の光の送受信を行うことで、回転中心302から放射線状に延びる512個のラインデータを得ることができる。この512個のラインデータは、高速フーリエ変換が施され、1ラインの各画素の値が決定されていく。各ラインは、回転中心位置の近傍では密で、回転中心位置から離れるにつれて互いに疎になっていく。そこで、この各ラインの空いた空間における画素については、周知の補間処理を行なって生成していき、人間が視覚できる2次元の断面画像を生成することになる。そして、生成された2次元断面画像を互いに接続することで、3次元血管画像を得ることができる。なお、光断面画像を再構成すると、イメージングコア250の回転中心302の近傍に3本の同心円303a乃至303cが生成される。これらは、光送受信部412が出射した光が、そのレンズ表面412a、カテーテルシース410の内側面410aと外側面410bの境界面で反射したことに起因する影である(各面は図4を参照されたい)。また、図示の符号304は、カテーテル101を患部まで案内するガイドワイヤの影である。実際には、ガイドワイヤは金属製であり、光を透過しないので、回転中心位置302から見てガイドワイヤの裏側部分の画像を得ることができない。図示はあくまで概念図であると認識されたい。
Here, a process for generating one optical cross-sectional image will be described with reference to FIG. This figure is a view for explaining the reconstruction processing of the cross-sectional image of the
以上、実施形態における画像診断装置の構成と動作の概要を説明した。次に、本発明に係る特徴である感度検出の原理について説明する。 The outline of the configuration and operation of the diagnostic imaging apparatus in the embodiment has been described above. Next, the principle of sensitivity detection, which is a feature according to the present invention, will be described.
背景技術にて説明したように、感度検査は画像診断装置の製造段階でメーカ側が専用の検査装置を用いて行うものである。それ故、ユーザ(医療機関)はメーカ側と同じ感度を検査することはできない。しかしながら、感度は経年劣化していくことも事実である。感度を適当な精度で把握できれば、許容範囲から外れる時期を予め予測することも可能となり、そのための事前対策を講じることも可能となる。よって、感度を把握することはユーザ側にとっても意義のあるものと言える。本発明者は、専用の検査装置ほどの高い精度ではないものの、ユーザの利用環境の範囲内で簡易的に感度を求める技術を創出するに至った。以下にその詳細を説明する。 As described in the background art, the sensitivity inspection is performed by the manufacturer using a dedicated inspection apparatus at the manufacturing stage of the diagnostic imaging apparatus. Therefore, the user (medical institution) cannot inspect the same sensitivity as the manufacturer. However, it is also a fact that the sensitivity continue to aging. If the sensitivity can be grasped with an appropriate accuracy, it is possible to predict in advance the time of deviating from the allowable range, and it is possible to take a precaution for that. Therefore, it can be said that grasping the sensitivity is meaningful for the user side. Although the present inventor is not as accurate as a dedicated inspection apparatus, the present inventor has come up with a technique for easily obtaining sensitivity within the range of the user's usage environment. Details will be described below.
感度は、光路差0の点における値であり、次式(1)で表される。
感度(dB)={光路差0におけるSNR(dB)}−{Sampleの反射率(dB)}…(1)
ここで、「sampleの反射率」とは、反射物を用いた場合に算出できる「10・log(反射光量(mW)/出力光量(mW))」で算出される値(dB)である。実施形態では、カテーテルシース410の内側面410aと外側面410bの間は、血液、水、空気などは含まない、樹脂であり、かつ、その部分の反射率は既知(固定)と見なせることに着目し、ここで言う「Sample」として好適であると考えた。「光路差0におけるSNR」は、このSample(シース410の素材内部)における実測の反射光の強度から、バックグラウンドノイズレベルを減じることで求めることができる。バックグランドノイズレベルは、「Sample」を測定した際と同じ状況下での、媒体に依存しない部分の信号を用いることが望ましい。発明者は、回転中心から光送受信部412のレンズの表面412aまでの「反射光」として検出された信号をバックグラウンドノイズと見なせると考えた。
The sensitivity is a value at a point where the optical path difference is 0, and is expressed by the following equation (1).
Sensitivity (dB) = {SNR (dB) at optical path difference 0} − {Sample reflectance (dB)} (1)
Here, the “sample reflectance” is a value (dB) calculated by “10 · log (reflected light amount (mW) / output light amount (mW))” that can be calculated when a reflector is used. In the embodiment, it is noted that the space between the
図5を用いてより詳しく説明する。同図は、FFT変換で得られたラインデータを示している。水平軸が回転中心からの距離(実施形態では1024個の画素データを生成するものとしているので、0乃至1023の範囲となる)を表し、縦軸がラインデータを構成する各画素の画素値(反射強度)である。 This will be described in more detail with reference to FIG. This figure shows line data obtained by FFT conversion. The horizontal axis represents the distance from the rotation center (in the embodiment, 1024 pieces of pixel data are generated, so the range is from 0 to 1023), and the vertical axis represents the pixel value of each pixel constituting the line data ( Reflection intensity).
既に説明したように、回転中心位置から2番目のピーク502がカテーテルシース410の内側面410a、3番目のピーク503がその外側面410bに対応する。よって、カテーテルシース410内の樹脂が占める部分の反射光の強度は、ピーク502と503との間である。実施形態で、ピーク502と503との間の「谷底」を、その対象位置の反射光強度SAとした。なお、ピーク502と503との間のちょうど中央位置の反射光強度としても構わないので、あくまで一例であると認識されたい。
As already described, the
また、最初のピーク501は、光送受信部412のレンズの表面412aに対応するので、原点から、レンズ表面412aよりも予め設定された画素分だけ内側までの反射光強度の平均値をバックグラウンドノイズの強度SBと認定した。
Since the
なお、上記は図5の1ライン分のデータから導き出したが、より精度を高めるため、イメージングコア250が1回転する際に得られる512本のラインについて求め、それぞれの平均値を最終的な値SA、SBとした。
Although the above is derived from the data for one line in FIG. 5, in order to improve the accuracy, 512 lines obtained when the
よって、求める感度S(dB)は、式(1)に従い、
S(dB)={光路差0におけるSNR(dB)}−{Sampleの反射率(dB)}
={SA-SB}−{C} …(2)
上式(2)において「C」は既知であり、外部記憶装置210に予め格納された値である。また、値SA,SBが、現実の干渉光データから導出した実測値である。そして、上記の式で得られた感度Sが、専用の感度検査装置と同じ精度ではないものの、一般の利用者にとっては、感度を表す指標値として十分な精度を有することを確かめた。
Therefore, the required sensitivity S (dB) is in accordance with equation (1):
S (dB) = {SNR (dB) at 0 optical path difference} − {Sample reflectance (dB)}
= {S A -S B }-{C} (2)
In the above equation (2), “C” is known and is a value stored in advance in the
以上、実施形態における感度算出の原理を説明した。感度Sを算出するタイミングは、光路長調整機構220を制御して測定光と参照光との光路差をゼロにする調整(キャリブレーション)を行った以降であれば、どのようなタイミングでも構わない。例えば、現実に、患者の血管内をスキャンして得られたラインデータを参照して算出しても構わない。ここでは、画像診断装置の電源をONにし、キャリブレーション処理に後続する処理で感度を計算する例を図6のフローチャートに従って説明する。なお、同図のフローチャートに係るプログラムは、外部記憶装置210に格納されているものである。
The principle of sensitivity calculation in the embodiment has been described above. The timing for calculating the sensitivity S may be any timing as long as the optical path
画像診断装置の電源がONになると、信号処理部201は、ステップS601にて、キャリブレーション処理を実行する。キャリブレーション処理とは、ユーザの操作に基づき光路長調整機構220を制御し、参照光と測定光の光路長を合せる処理であり、公知のものである。よって、ここでの詳述はしないが、その過程では現実に測定した干渉光データからラインデータを生成する処理を行っている。従って、キャリブレーションを終えた段階では、測定光と参照光との光路長があった状態でのラインデータはメモリ202に記憶保持されている。そこで、信号処理部201は、ステップS602にて、メモリ202内のイメージングコア250の1回転分(実施形態では512本)のラインデータを参照し、先に示した算出処理を経て、現在の感度Sを求める。そして、信号処理部201は、求めた感度Sと現在の日時とを、ログ情報として外部記憶装置210に追加記録する。この結果、外部記憶装置210には、本装置が起動する毎に、感度と日時情報とが時系列に蓄積されることになる。
When the power of the diagnostic imaging apparatus is turned on, the
ステップS604では、算出した現在の感度が予め設定された許容範囲内にあるか否かを判定する。求めた感度がその範囲から外れるとステップS606にて、正常な断面画像を再構成することはできないと見なし、LCDモニタ113に、算出した感度(例えば赤色)と共に、許容範囲外となったことを示すエラーを表示し、本処理を終える。なお、エラー報知処理を行った場合には、それ以降の処理には進めないようにすることが望ましい。
In step S604, it is determined whether the calculated current sensitivity is within a preset allowable range. If the calculated sensitivity is out of the range, it is considered that a normal cross-sectional image cannot be reconstructed in step S606, and the
一方、ステップS604にて、算出した現在の感度が正常値である(許容範囲内にある)と判定された場合、処理はステップS605に進む。このステップS605では、算出した感度Sは正常な値であるので、その感度Sを青色で表示する。更に、記録した現在の感度を含む過去の感度情報と日付から、許容範囲外となる時期(許容範囲の上限値、下限値のいずれかの閾値と交差する時期)を予測する処理を行う。具体的には、日付を水平軸、感度を縦軸とする2次元座標系において、最小二乗法を用いて、ログ情報に近似する直線の方程式を算出する。そして、方程式が示す直線と閾値が交わる日時をもとめれば良い。ステップS607では、求めた予測時期と、外部記憶装置210に記憶された次回メンテナンス実施予定日とを比較し、予測時期の方が現在に近い将来である場合、ステップS608に進み、感度が許容範囲外になる予測時期が定期点検前になる可能性があることをユーザに通知し、注意を喚起する。なお、予測時期の精度は、例えば月単位で良いであろう。
On the other hand, if it is determined in step S604 that the calculated current sensitivity is a normal value (within an allowable range), the process proceeds to step S605. In step S605, since the calculated sensitivity S is a normal value, the sensitivity S is displayed in blue. Furthermore, a process of predicting a time (out of the allowable range upper limit value or lower limit value) is predicted from past sensitivity information including the recorded current sensitivity and date. Specifically, in a two-dimensional coordinate system with the date as the horizontal axis and the sensitivity as the vertical axis, a linear equation that approximates the log information is calculated using the least square method. Then, the date and time when the straight line indicated by the equation intersects with the threshold value may be obtained. In step S607, the calculated predicted time is compared with the next scheduled maintenance date stored in the
以上本発明に係る実施の形態を説明した。本実施形態によれば、画像診断装置を利用するユーザ側にて、簡易ではあるものの、感度を知ることができる。また、その感度を利用して、感度の低下によって断面画像の信頼性が維持できる残りの期間も把握できることになり、メンテナンスの計画建てにも有効利用できるようになる。 The embodiment according to the present invention has been described above. According to the present embodiment, it is possible to know the sensitivity on the user side using the diagnostic imaging apparatus, although it is simple. In addition, by using the sensitivity, it is possible to grasp the remaining period during which the reliability of the cross-sectional image can be maintained due to the decrease in sensitivity, and it is possible to effectively use the maintenance plan.
なお、図6のフローチャートにおいて、ステップS608の直後に以下の例1、例2の処理を行っても良い。
[例1] ステップS602にて算出した感度に基づき、波長掃引光源203の出力、又は、参照光(通常は絞り調整で実現している)の出力を調整する。その調整の下で感度を補正する。そして、補正後の感度が、補正可能な範囲を超えている場合、もはや感度を調整できないことを意味するので、その旨を報知する。
[例2] ステップS602にて算出した感度に基づき、干渉光データのゲイン、又はダイナミックレンジを調整する。そして、その調整の下で感度を補正する。そして、補正後の感度が、補正可能な範囲を超えている場合、もはや感度を調整できないことを意味するので、その旨を報知する。
In the flowchart of FIG. 6, the following processing of Example 1 and Example 2 may be performed immediately after Step S608.
[Example 1] Based on the sensitivity calculated in step S602, the output of the wavelength swept
[Example 2] Based on the sensitivity calculated in step S602, the gain or dynamic range of the interference light data is adjusted. Then, the sensitivity is corrected under the adjustment. When the corrected sensitivity exceeds the correctable range, it means that the sensitivity can no longer be adjusted, and this is notified.
また、実施形態では、キャリブレーション処理直後に感度算出処理を行う例を説明したが、ラインデータがあればそのラインデータを得た際の装置の感度を求めることができる。つまり、過去の臨床データ(スキャンしてFFT変換して得られたラインデータ)があれば、そのデータを解析してその臨床データを得る際の装置の感度が如何なるものであったのかを判定することも可能となる。 In the embodiment, the example in which the sensitivity calculation process is performed immediately after the calibration process has been described. However, if there is line data, the sensitivity of the apparatus when the line data is obtained can be obtained. In other words, if there is past clinical data (line data obtained by scanning and FFT conversion), the data is analyzed to determine the sensitivity of the apparatus when obtaining the clinical data. It is also possible.
なお、実施形態では、値SA、SBを、イメージングコア250の1回転で得られる512本のラインデータそれぞれから求めた値の平均値とするものであったが、演算速度を速めるため、512本のラインデータのうち、適当な間隔(例えば1本置き間隔のラインデータ)でラインデータから求めても良い。
In the embodiment, the values S A and S B are average values of values obtained from 512 line data obtained by one rotation of the
また、本実施形態では、OCT又はOFDIを用いた光干渉を利用した画像診断装置に適用する例を説明した。最近では、イメージングコアに光送受信部だけでなく、超音波送受信部も有し、一度のスキャンで光干渉を利用した断面画像と、超音波を利用した断面画像を生成する装置もあり、係る装置に適用しても構わない。 In the present embodiment, an example in which the present invention is applied to an image diagnostic apparatus using optical interference using OCT or OFDI has been described. Recently, an imaging core has not only an optical transmission / reception unit but also an ultrasonic transmission / reception unit, and there is also a device that generates a cross-sectional image using optical interference and a cross-sectional image using ultrasonic waves in one scan. You may apply to.
Claims (11)
光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析手段と、
該解析手段によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出手段とを有し、
前記解析手段は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出手段を含み、
前記算出手段は、前記検出手段で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出する
ことを特徴とする画像診断装置。 An image diagnostic apparatus using optical interference that reconstructs a cross-sectional image in a blood vessel using a catheter in which an optical transmission / reception unit is rotatably accommodated near the tip,
An analysis means for analyzing line data obtained by performing Fourier transform on optical interference data;
Based on the analysis result of the line data by said analysis means, have a calculation means for calculating the sensitivity of the diagnostic imaging apparatus,
The analysis means includes, based on the line data, first data between an inner surface and an outer surface of the sheath of the catheter, and a second data between a rotation center position of the optical transmission / reception unit and a lens surface of the optical transmission / reception unit. Including detection means for detecting data;
The image diagnosis apparatus characterized in that the calculation means calculates the sensitivity of the image diagnosis apparatus based on the first and second data obtained by the detection means .
該予測手段で予測した時期を報知する報知手段と
を更に有することを特徴とする請求項5に記載の画像診断装置。 Prediction means for predicting the time when it falls outside the preset allowable range based on the log information;
The diagnostic imaging apparatus according to claim 5 , further comprising: an informing unit that informs the time predicted by the predicting unit.
解析手段が、光干渉データに対してフーリエ変換を行うことで得られたラインデータを解析する解析工程と、
算出手段が、該解析工程によるラインデータの解析結果に基づき、前記画像診断装置の感度を算出する算出工程とを有し、
前記解析工程は、前記ラインデータから、前記カテーテルのシースの内面と外面との間の第1のデータ、前記光送受信部の回転中心位置と当該光送受信部のレンズ表面との間の第2のデータを検出する検出工程を含み、
前記算出工程では、前記検出工程で得られた前記第1、第2のデータに基づき、前記画像診断装置の感度を算出する
ことを特徴とする画像診断装置の作動方法。 An operation method of an image diagnostic apparatus using optical interference that reconstructs a cross-sectional image in a blood vessel using a catheter in which a light transmitting / receiving unit is rotatably accommodated near the tip,
An analysis step in which the analysis means analyzes line data obtained by performing Fourier transform on the optical interference data;
Calculating means, based on the analysis result of the line data by the analysis process, possess a calculation step of calculating the sensitivity of the diagnostic imaging apparatus,
The analysis step includes, based on the line data, first data between an inner surface and an outer surface of the sheath of the catheter, and a second data between a rotation center position of the optical transmission / reception unit and a lens surface of the optical transmission / reception unit. Including a detection step of detecting data;
In the calculating step, the detection of the first obtained in the step, based on the second data, a method of operating an image diagnostic apparatus and calculates the sensitivity of the diagnostic imaging apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014058096A JP6224496B2 (en) | 2014-03-20 | 2014-03-20 | Diagnostic imaging apparatus and operating method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014058096A JP6224496B2 (en) | 2014-03-20 | 2014-03-20 | Diagnostic imaging apparatus and operating method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015181533A JP2015181533A (en) | 2015-10-22 |
| JP6224496B2 true JP6224496B2 (en) | 2017-11-01 |
Family
ID=54348833
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014058096A Active JP6224496B2 (en) | 2014-03-20 | 2014-03-20 | Diagnostic imaging apparatus and operating method thereof |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6224496B2 (en) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0899452A (en) * | 1994-09-30 | 1996-04-16 | Ricoh Co Ltd | Image processor |
| JPH08174226A (en) * | 1994-12-28 | 1996-07-09 | Kawasaki Steel Corp | Welding equipment of steel plate |
| WO2006100544A1 (en) * | 2005-03-21 | 2006-09-28 | Ecole Polytechnique Federale De Lausanne (Epfl) | Phase sensitive fourier domain optical coherence tomography |
| EP2401951B1 (en) * | 2009-02-24 | 2021-11-03 | Terumo Kabushiki Kaisha | Image diagnosis device and control method therefor |
-
2014
- 2014-03-20 JP JP2014058096A patent/JP6224496B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015181533A (en) | 2015-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2407107B1 (en) | Diagnostic imaging device | |
| JP4768494B2 (en) | Diagnostic imaging apparatus and processing method thereof | |
| US9168003B2 (en) | Imaging apparatus for diagnosis and control method thereof | |
| JP5485760B2 (en) | Optical coherence tomographic image forming apparatus and control method thereof | |
| JP6059334B2 (en) | Diagnostic imaging apparatus, information processing apparatus, operating method thereof, program, and computer-readable storage medium | |
| JP6437440B2 (en) | Diagnostic imaging apparatus, operating method thereof, program, and computer-readable storage medium | |
| JP5524947B2 (en) | Diagnostic imaging apparatus and operating method thereof | |
| JP2016174809A (en) | Image diagnosis apparatus, control method thereof, program and computer-readable storage medium | |
| US20140240713A1 (en) | Apparatuses and methods for imaging inside a vessel | |
| JP6105740B2 (en) | Diagnostic imaging apparatus and operating method thereof | |
| US20170014100A1 (en) | Control device, operation method thereof and diagnosis system | |
| US11129592B2 (en) | Image diagnostic apparatus and method and program | |
| JP5628785B2 (en) | Diagnostic imaging equipment | |
| JP2011072596A (en) | Diagnostic imaging apparatus and method for controlling same | |
| JP6437920B2 (en) | Diagnostic imaging equipment | |
| JPWO2016136579A1 (en) | Diagnostic imaging apparatus, operating method thereof, program, and computer-readable storage medium | |
| JP6062421B2 (en) | Diagnostic imaging apparatus and operating method thereof | |
| JP6224496B2 (en) | Diagnostic imaging apparatus and operating method thereof | |
| JP5399844B2 (en) | Diagnostic imaging apparatus and operating method thereof | |
| JP6584806B2 (en) | Diagnostic imaging apparatus, control method therefor, program, and computer-readable storage medium | |
| JPWO2018061780A1 (en) | Control device, image diagnostic device, processing method of control device and program | |
| JP2018153563A (en) | Tomographic apparatus and control method of the same | |
| JP2015181701A (en) | Image diagnostic apparatus and control method therefor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170731 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170731 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6224496 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |