JP6205733B2 - 自覚式眼屈折力測定装置 - Google Patents
自覚式眼屈折力測定装置 Download PDFInfo
- Publication number
- JP6205733B2 JP6205733B2 JP2013016260A JP2013016260A JP6205733B2 JP 6205733 B2 JP6205733 B2 JP 6205733B2 JP 2013016260 A JP2013016260 A JP 2013016260A JP 2013016260 A JP2013016260 A JP 2013016260A JP 6205733 B2 JP6205733 B2 JP 6205733B2
- Authority
- JP
- Japan
- Prior art keywords
- eye
- optical system
- correction
- refractive power
- correction optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
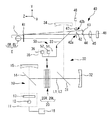
図1は第1実施形態の装置の外観図である。図2は本実施形態の内部を示す概略構成図である。本件発明の装置は視標投光系10と、矯正光学系20、リレー光学系30、検出光学系40、ずれ補正手段50から大略構成される。視標投光系10は、被検眼Eに検査視標を投光する投光光学系である。矯正光学系20は、左右の被検眼Eに向かう検査視標の光束の屈折度をそれぞれ変化し得るように構成される。リレー光学系30は矯正光学系20を通過した視標を被検眼Eへリレーする。検出光学系40は、被検眼Eの位置ずれを検出するずれ検出手段である。検出光学系40は眼屈折力測定中の被検眼Eの位置ずれを検出する。ずれ補正手段50は眼位置のずれに基づいて、検査視標の結像位置を補正する補正手段である。なお、以下符号に付されるR、Lはそれぞれ右眼用、左眼用を示すものとする。また、以下の説明では、被検眼Eと装置との位置関係について、被検眼Eと装置が対向した状態における前後方向をZ方向、左右方向をX方向、上下方向をY方向として説明する。
図1(a)は本実施形態の自覚式眼屈折力測定装置(以下、装置と略す)1を斜め方向から見た概略図である。装置1は、筐体2と、被検者に視標を呈示するための呈示窓3、装置1を操作するためのコントローラ4、被検眼Eと装置1との距離を一定に保つための額当て60などを備える。
図2を用いて視標投光系10を説明する。視標投光系10は、例えば、視標投光部11と、ハーフミラー14、凹面鏡15、駆動部16等によって構成される。視標投光部11は、例えば、光源12、液晶ディスプレイ13等で構成され、検査視標を投光する。
一対の矯正光学系20R,20Lは球面度数、円柱度数、円柱軸等を矯正する。矯正光学系20Rは右眼測定用、矯正光学系20Lは左眼測定用であり、これらは光学的に同一の構成になっている。図3は矯正光学系20R,20Lを図2のB方向から見た概略図である。
図2に示すように、リレー光学系30は、例えば、ハーフミラー31、凹面鏡32、追尾用ミラー33、凹面鏡34、追尾用ミラー33を下方(Y方向)に移動可能な移動機構35から構成されてもよい。移動機構35には駆動部36が備わり、追尾用ミラー33を下方(Y方向)に移動させる。
図2に示すように、検出光学系40は自動追尾用光源41、遮蔽板42、平面ミラー43、ハーフミラー44、集光レンズ45、受光素子46等で構成される。検出光学系40は眼屈折力測定中の被検眼Eの位置ずれを検出する。また、検出光学系40は、被検眼Eと矯正光学系20の像とのずれを検出する。光源41は、例えば、被検者の眼鏡装用位置に配置されるよう、テストフレーム7に取り付けられる。光源41の位置ずれに基づいて、被検眼Eの位置ずれを検出する。遮蔽板42には、2つの孔42a,42bが開いている。孔42aと孔42bは間隔を空けて設けられる。また、蓋47は孔42bを塞ぐために設けられる。駆動部48は蓋47を制御し、孔42bを開閉することができてもよい。
ずれ補正手段50は、例えば、追尾用ミラー33、駆動機構51(図2参照)で構成される。追尾用ミラー33は左右一対の矯正光学系20R,20Lの共通光路に配置される。追尾用ミラー33を回転移動させることで、矯正光学系20R,20L(において光路L1,L2に配置された光学素子)の像が形成される位置を補正する。
図4は本実施形態の制御系を示すブロック図である。コントローラ4に備わる制御部90は、視標投光系10の光源12、ディスプレイ13、駆動部16、矯正光学系20の駆動部22,23、リレー光学系30の駆動部36、検出光学系40の光源41、受光素子46、駆動部48、ずれ補正手段50の駆動部52、コントローラのメモリ80などと接続されてもよい。制御部90は受光素子46からの受光信号を受け取る。制御部90はこの受光信号に基づいて駆動部52を制御し、追尾用ミラー33の向く方向を制御する。
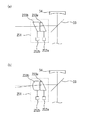
追尾用ミラー33の制御方法を説明する。図5は本実施形態に係る装置において、検査中の被検眼Eの位置ずれを補正する際の一例である。図5(a)は被検眼Eの眼位置がずれる前の状態であり、図5(b)はY方向に眼位置がずれた直後の図であり、図5(c)はずれに基づいて追尾用ミラー33の角度が補正された後の状態である。なお、被検眼Eと光源41は一体的に移動するものとする。また、検査中において孔42bは蓋47によって塞がれているものとする。
本実施形態の装置1を用いて被検眼Eの遠用検査を行う手順を装置1の動作とともに説明する。まず、検者はコントローラ4を操作し、測定モードを遠用測定モードに設定する。そして、所望の遠用検査視標を呈示窓3に呈示する。次に、検者は被検者にテストフレーム7を装着させる。また、検者は、額当て60に被検者の額を当てさせ、呈示窓3を観察するように指示する。検者は報知手段8が作動する(例えば、ランプが点灯する)まで、ノブ63の操作によって額当て60の作動距離方向の位置を調整する。額当て60の位置調整が完了すると、検者はコントローラ4の操作によって孔42bを蓋47で塞ぐ。制御部90は駆動部48を制御して蓋47で孔42bを塞ぐ。これにより、受光素子46に受光される光束は孔42aを通過した光束のみになる。孔42aを通過した光束は、XY方向の眼位置の検出に利用される。
近用検査を行う手順を装置1の動作とともに説明する。図7は近用検査時における光学系の配置を示す概略図である。検者はコントローラ4を操作し、測定モードを近用測定モードに設定する。近用測定モードに設定されると、制御部90は駆動部16を制御し、視標投光部11(例えば、光源12とディスプレイ13)を凹面鏡15に近づける。光路長を変化させることで、検査視標を近用距離(例えば、被検眼Eから40mm前方)にて呈示することができる。なお、近用距離を短く設定する場合、ハーフミラー14と凹面鏡15を凸レンズで置き換えた構成にすることが考えられる。この構成において、検査視標を遠用距離から近用距離に切り替えて呈示する場合、視標投光部11を凸レンズに近づけるとよい。この構成については、特開昭59‐85642号公報を参照されたい。
2 筐体
3 呈示窓
4 コントローラ
7 テストフレーム
10 視標投光系
20 矯正光学系
30 リレー光学系
40 検出光学系
50 ずれ補正手段
60 額当て
Claims (6)
- 被検眼の眼底に検査用視標を形成させるための視標光束を前記被検眼に向けて投光する投光光学系と、前記投光光学系の光路中であって屈折力を変化しうるように構成された矯正光学系と、前記矯正光学系を通過した光束をリレーし、かつ前記矯正光学系によって矯正された前記視標光束を前記被検眼に投影するように配置されたリレー光学系と、を備え、前記矯正光学系の屈折力を変化することにより前記被検眼の眼屈折力を測定する自覚式眼屈折力測定装置であって、
前記被検眼と、前記矯正光学系によって矯正された前記視標光束との位置ずれを検出するずれ検出手段と、
前記ずれ検出手段によって検出された検出結果に基づいて、前記視標光束の投影位置を光学的に補正する補正手段と、
を備えることを特徴とする自覚式眼屈折力測定装置。 - 前記補正手段は、前記矯正光学系と被検者との間に配置された光学部材を駆動させる駆動手段を有し、前記検出結果に基づいて前記駆動手段を制御し、前記視標光束を偏向させることにより前記投影位置を光学的に補正することを特徴とする請求項1の自覚式眼屈折力測定装置。
- 前記矯正光学系は、左右一対に設けられた右眼用矯正光学系と左眼用矯正光学系を有し、
前記補正手段は、左右一対に設けられた右眼用補正手段と、左眼用補正手段と、を有することを特徴とする請求項1または2の自覚式眼屈折力測定装置。 - 前記矯正光学系は、左右一対に設けられた右眼用矯正光学系と左眼用矯正光学系を有し、
前記リレー光学系は、さらに、左右一対の各矯正光学系を通過した光束を共通にリレーするリレー光学系であって、
前記光学部材は、前記リレー光学系における前記右眼用矯正光学系と前記左眼用矯正光学系の共通光路に配置されていることを特徴とする請求項2の自覚式眼屈折力測定装置。 - さらに、前記被検眼の左右眼の傾きを検出する傾き検出手段と、
前記傾き検出手段による検出結果を報知する報知手段と、
を備えることを特徴とする請求項1〜4のいずれかの自覚式眼屈折力測定装置。 - 前記ずれ検出手段は、前記被検眼の眼屈折力の測定中における、前記被検眼と、前記矯正光学系によって矯正された前記視標光束との位置ずれを検出することを特徴とする請求項1〜5のいずれかの自覚式眼屈折力測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013016260A JP6205733B2 (ja) | 2013-01-30 | 2013-01-30 | 自覚式眼屈折力測定装置 |
| KR1020140010401A KR102247988B1 (ko) | 2013-01-30 | 2014-01-28 | 자각식 안굴절력 측정 장치 |
| US14/167,368 US9351636B2 (en) | 2013-01-30 | 2014-01-29 | Subjective eye refracting power measurement apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013016260A JP6205733B2 (ja) | 2013-01-30 | 2013-01-30 | 自覚式眼屈折力測定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014147417A JP2014147417A (ja) | 2014-08-21 |
| JP2014147417A5 JP2014147417A5 (ja) | 2016-03-17 |
| JP6205733B2 true JP6205733B2 (ja) | 2017-10-04 |
Family
ID=51571018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013016260A Active JP6205733B2 (ja) | 2013-01-30 | 2013-01-30 | 自覚式眼屈折力測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6205733B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018047049A (ja) * | 2016-09-21 | 2018-03-29 | 株式会社ニデック | 自覚式検眼装置、及び自覚式検眼プログラム |
| KR101855013B1 (ko) | 2016-12-28 | 2018-05-04 | 부산대학교 산학협력단 | 비축 거울과 회전 광학계를 이용한 고속 안구 추적장치 |
| JP7390793B2 (ja) | 2019-02-07 | 2023-12-04 | 株式会社トプコン | 眼科装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5985642A (ja) * | 1982-11-06 | 1984-05-17 | 株式会社トプコン | 自覚式屈折度測定装置 |
| JP3256264B2 (ja) * | 1992-02-21 | 2002-02-12 | 株式会社ニデック | 検眼装置 |
| JP2882997B2 (ja) * | 1994-02-28 | 1999-04-19 | 株式会社ニデック | 視力検査装置 |
| JPH11225966A (ja) * | 1998-02-19 | 1999-08-24 | Topcon Corp | 眼科測定装置 |
| US6425665B2 (en) * | 2000-03-31 | 2002-07-30 | Nidek Co., Ltd. | Visual acuity examination apparatus |
| JP4837968B2 (ja) * | 2005-09-30 | 2011-12-14 | 株式会社ニデック | 近用視標呈示装置 |
-
2013
- 2013-01-30 JP JP2013016260A patent/JP6205733B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014147417A (ja) | 2014-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102247988B1 (ko) | 자각식 안굴절력 측정 장치 | |
| JP6951054B2 (ja) | 自覚式検眼装置 | |
| US20120113389A1 (en) | Fundus photographing apparatus | |
| JP6205732B2 (ja) | 自覚式眼屈折力測定装置 | |
| US11534061B2 (en) | Subjective optometry apparatus | |
| CN113940620A (zh) | 主观式检眼装置 | |
| US10602924B2 (en) | Subjective optometry apparatus | |
| EP3381350B1 (en) | Subjective optometry apparatus and subjective optometry program | |
| JP7210883B2 (ja) | 自覚式検眼装置 | |
| JP6205733B2 (ja) | 自覚式眼屈折力測定装置 | |
| JP6853495B2 (ja) | 自覚式検眼装置及び自覚式検眼プログラム | |
| JP6379639B2 (ja) | 眼鏡装用パラメータ測定用撮影装置、眼鏡装用パラメータ測定用撮影プログラム | |
| JP2018143553A (ja) | 自覚式検眼装置 | |
| JP6841091B2 (ja) | 自覚式検眼装置 | |
| WO2018230420A1 (ja) | 自覚式検眼装置 | |
| US20190099072A1 (en) | Ophthalmic device | |
| JP4609697B2 (ja) | 眼屈折力測定装置 | |
| JP6766342B2 (ja) | 自覚式検眼装置 | |
| JP2018038788A (ja) | 自覚式検眼装置及び自覚式検眼プログラム | |
| JP2018171140A (ja) | 自覚式検眼装置及び自覚式検眼プログラム | |
| JP6686380B2 (ja) | 自覚式検眼装置及び自覚式検眼プログラム | |
| EP4252627A1 (en) | Optometry apparatus and optometry program | |
| JP7443831B2 (ja) | 検眼システム、検眼用コントローラ、および検眼プログラム | |
| JP7328514B2 (ja) | 検眼装置 | |
| JP7379927B2 (ja) | 自覚式検眼装置及び自覚式検眼プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170821 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6205733 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |