JP6091082B2 - 画像処理装置、画像処理方法、及び、プログラム - Google Patents
画像処理装置、画像処理方法、及び、プログラム Download PDFInfo
- Publication number
- JP6091082B2 JP6091082B2 JP2012109982A JP2012109982A JP6091082B2 JP 6091082 B2 JP6091082 B2 JP 6091082B2 JP 2012109982 A JP2012109982 A JP 2012109982A JP 2012109982 A JP2012109982 A JP 2012109982A JP 6091082 B2 JP6091082 B2 JP 6091082B2
- Authority
- JP
- Japan
- Prior art keywords
- image signal
- distortion
- image
- interpolation
- motion vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Television Systems (AREA)
Description
入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理装置であって、
前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正手段と、
前記歪み補正処理後の画像信号から動きベクトルを検出する検出手段と、
前記入力画像信号の画像の歪み度合いに応じて、前記検出手段で検出された動きベクトルを歪ませる歪み処理手段と、
前記入力画像信号と、前記歪み処理手段で歪ませられた動きベクトルとから、前記入力画像信号のフレーム間を補間する補間フレームを生成する生成手段と、
を有することを特徴とする画像処理装置である。
入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理装置であって、
前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正手段と、
前記歪み補正処理後の画像信号から動きベクトルを検出する検出手段と、
前記歪み補正処理後の画像信号と、前記検出手段で検出された動きベクトルとから、前記歪み補正処理後の画像信号のフレーム間を補間する補間フレームを生成する生成手段と、
前記入力画像信号の画像の歪み度合いに応じて、前記生成手段で生成された補間フレームを歪ませることにより、前記入力画像信号のフレーム間を補間する補間フレームを生成する歪み処理手段と、
を有することを特徴とする画像処理装置である。
入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理方法であって、
コンピュータが、前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正ステップと、
コンピュータが、前記歪み補正処理後の画像信号から動きベクトルを検出する検出ステップと、
コンピュータが、前記入力画像信号の画像の歪み度合いに応じて、前記検出ステップで検出された動きベクトルを歪ませる歪み処理ステップと、
コンピュータが、前記入力画像信号と、前記歪み処理ステップで歪ませられた動きベクトルとから、前記入力画像信号のフレーム間を補間する補間フレームを生成する生成ステップと、
を有することを特徴とする画像処理方法である。
入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理方法であって、
コンピュータが、前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正ステップと、
コンピュータが、前記歪み補正処理後の画像信号から動きベクトルを検出する検出ステップと、
コンピュータが、前記歪み補正処理後の画像信号と、前記検出ステップで検出された動きベクトルとから、前記歪み補正処理後の画像信号のフレーム間を補間する補間フレームを生成する生成ステップと、
コンピュータが、前記入力画像信号の画像の歪み度合いに応じて、前記生成ステップで生成された補間フレームを歪ませることにより、前記入力画像信号のフレーム間を補間する補間フレームを生成する歪み処理ステップと、
を有することを特徴とする画像処理方法である。
上記画像処理方法の各ステップをコンピュータに実行させることを特徴とするプログラムである。
本発明の実施例1に係る画像処理装置及び画像処理方法について図を参照して説明する。本実施例に係る画像処理装置は、入力画像信号のフレーム間を補間して、入力画像信号のフレームレートを高めるフレームレート変換(FRC)を行う。
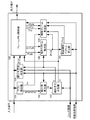
図1は、本実施例に係る画像処理装置の機能構成の一例を示すブロック図である。本実施例に係る画像処理装置は、ケラレ検出部101、縮小率算出部102、補間方式決定部103、縮小&歪曲補正部104、フレームメモリ制御部105、動きベクトル検出部106、歪曲補間ベクトル&拡縮率算出部107、補間フレーム生成部108、などを有する。
図1の各機能部は、不図示のCPU(中央演算処理装置;コンピュータ)が、不図示のメモリ等の記録媒体に記憶されたプログラムを読み出して実行することにより実現される。
なお、本実施例では、入力画像信号のn番目のフレームをF(n)と表記する。F(n)とF(n+1)の間の補間フレームをAF(n)と表記する。また、歪みの無い画像に対応する歪みの無い空間内の座標を通常座標と呼び、魚眼レンズで撮影したような歪みのある画像に対応する歪みのある空間内の座標を歪曲座標と呼ぶ。
入力画像信号は、図2に示すように、フレーム単位で画像処理装置に入力される。具体的には、入力画像信号のフレームは、F(n)、F(n+1)、F(n+2)・・・のように、順番に入力される。
フレームメモリ制御部105は、入力端子から入力された画像信号(入力画像信号)、具体的には入力端子から入力されたフレームFを記憶する。また、フレームメモリ制御部105は、補間フレーム生成部108で生成された補間フレームAFを記憶する。そして、補間方式決定部103で決定された補間方式m(FRCの補間方式)が“通常動きベクトル補間”又は“魚眼動きベクトル補間”の場合には、フレームメモリ制御部105は、図3のように、入力画像信号のフレーム間に補間フレームAFを挿入する。そして、フレームメモリ制御部105は、補間フレームAFが挿入された入力画像信号を、出力端子から、入力画像信号のフレームレートの2倍のフレームレートで出力する。具体的には、F(n)、AF(n)、F(n+1)、AF(n+1)、F(n+2)・・・の順にフレームと補間フレームが出力される。また、補間方式mが“2度出し補間”の場合は、フレームメモリ制御部105は、フレーム間に補間フレームを挿入せず、図4のように入力画像信号の各フレームを、入力画像信号のフレームレートの2倍のフレームレートで2回ずつ出力する。即ち、“2度出し補間”の場合は、入力画像信号のフレームが補間フレームとされる。このようにしてフレーム数が2倍に増やされ、フレームレートが2倍に高められる。
なお、フレームレート変換後のフレームレートは、入力画像信号のフレームレートの2倍のフレームレートに限らない。フレームレート変換により入力画像信号のフレームレートをN倍に高める場合には、入力画像信号のフレーム間にN−1個の補間フレームを挿入するか、入力画像信号の各フレームをN回ずつ出力すればよい。
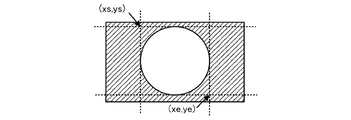
図5は、入力画像信号の1フレームの画像の一例を示す図である。図5は、入力画像信号が歪んだ画像の信号である場合の例である。具体的には、図5は、魚眼レンズを用いて撮影した入力画像信号の例である。図5の中央にある円形の領域は、撮影された画像の領域(撮影領域)である。斜線の領域は撮影された画像の領域以外の領域(非撮影領域;典型的には黒色の領域)である。非撮影領域は、一般的に、ケラレと呼ばれる。ケラレ検出
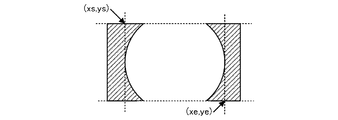
部101は、撮影領域と非撮影領域の境界を検出する。撮影領域と非撮影領域の境界は、例えば、画像の上下左右の端から画素値が黒でなくなる位置を探すことで検出することができる。ケラレ検出部101は、撮影領域と非撮影領域の境界を表す情報kzを出力する。また、境界が検出された場合、ケラレ検出部101は、撮影領域を表す情報(撮影領域情報)として、各辺が撮影領域の接線である四角形の領域を表す情報を生成する。例えば、図5の例では、撮影領域情報として、上記四角形の領域の始点座標(xs,ys)と終点座標(xe,ye)が求められる。また、図6のように撮影領域が円形にならない場合もある。その場合にも同様に、各辺が撮影領域の接線である四角形の領域の始点座標(xs,ys)と終点座標(xe,ye)が求められる。
なお、撮影領域情報は、これらに限らない。例えば、撮影領域情報は、各辺が撮影領域の接線である四角形の領域の中心位置、水平方向サイズ、及び、垂直方向サイズであってもよい。
縮小率算出部102は、縮小&歪曲補正部104で使用する縮小率k(具体的には、縮小&歪曲補正部104で使用する縮小率kの候補値)を算出する。
縮小&歪曲補正部104は、入力画像信号が歪んだ画像の信号である場合に、入力画像信号に画像の歪みを補正する歪み補正処理を施す。それにより、動きベクトル検出部106で動きベクトル検出する際に使用する画像信号(動きベクトル検出用フレーム)が生成され、フレームメモリ制御部105に記憶される。
歪んでいる画像から歪みを除去すると画像サイズが大きくなる。しかし、フレームメモリ制御部105の記憶容量や転送速度、動きベクトル検出部106が動きベクトル検出処理を実行することのできる時間には制限がある。そこで、本実施例では、歪み補正処理後の画像信号に縮小処理を施す。それにより、動きベクトル検出用フレームのデータ量を低減することができ、且つ、動きベクトル検出処理の処理負荷を低減することができる。
通常座標、即ち歪曲座標(x,y)に歪み補正処理を施して得られる座標である。g、fは変換係数である。
1つの動きベクトル検出用フレームSFのデータ量を(v_len/2)×(h_len/2)にする場合には、縮小率kは以下の式1によって求められる。
縮小率k={(v_len/2)×(h_len/2)}
/{(xe’−xs’+1)×(ye’−ys’+1)} ・・・(式1)
縮小率kは、元の画像サイズに対する、縮小処理後の画像サイズの比であり、0より大きく1より小さい値である。
なお、歪曲収差情報は、外部から入力されてもよいし、画像処理装置内に予め記憶されていてもよい。例えば、歪曲収差情報は入力画像信号にメタデータとして付加されていてもよい。画像処理装置内に予め記憶された複数の歪曲収差情報の中から、ユーザ操作に応じて使用する歪曲収差情報が選択されてもよい。
なお、縮小率kは式1で求まる値に限らない。縮小率は予め定められた固定値であってもよい。
補間方式決定部103は、レンズの種類と縮小率kから、FRCの補間方式mを決定する。レンズの種類を表す情報(レンズ情報)は、外部から入力されてもよいし、画像処理装置内に予め記憶されていてもよい。例えば、レンズ情報は、入力画像信号にメタデータとして付加されていてもよいし、ユーザにより入力されてもよい。画像処理装置内に予め記憶された複数のレンズ情報の中から、ユーザ操作に応じて使用するレンズ情報が選択されてもよい。レンズ情報は、入力画像信号を撮影する際に使用したレンズの種類を表す。補間方式mには、“通常動きベクトル補間”、“魚眼動きベクトル補間”、“2度出し補間”などがある。
レンズの種類が魚眼レンズ以外の場合(即ち、入力画像信号が歪んだ画像の信号でない場合)は、補間方式mとして“通常動きベクトル補間”が設定される。また、入力画像信号が歪んだ画像の信号でない場合は、入力画像信号で表される画像の全領域が撮影領域となる。そのため、縮小処理前の動きベクトル検出用フレームの画像サイズ(データ量)は、v_len×h_lenとなる。式1に基づいて、補間方式決定部103は、縮小率kとして1/4を設定し、出力する。
レンズの種類が魚眼レンズの場合には、補間方式決定部103は、縮小率kと所定の閾値th_kを比較する。k≧th_kの場合、補間方式mとして“魚眼動きベクトル補間”が設定され、縮小率算出部102で求めた縮小率kがそのまま縮小&歪曲補正部104に出力される。k<th_kの場合は、補間方式mとして“2度出し補間”が設定され、縮小率kとして1/4が縮小&歪曲補正部104に出力される。但し、“2度出し補間”の場合は、縮小率kは使用されないため、縮小率kとして1/4以外の値が出力されてもよい(縮小率kは出力されなくてもよい)。画像を縮小しすぎると、動きベクトルの検出精度が低下してしまう。本実施例では、画像が複数のブロック(分割領域)に分割され、ブロック毎に動きベクトルが検出される。画像を縮小しすぎると、動きベクトルが正しく検出できるブロックと、動きベクトルが正しく検出できないブロックとが混在してしまい、動きベクトルを用いて補間フレームを生成した際に、補間フレームの画像が乱れてしまう虞がある。k<th_kの場合に“2度出し補間”を設定するのは、上記動きベクトルの検出精度の低下による補間フレームの画像の乱れを抑制するためである。th_kとしては、例えば、“通常動きベクトル補間”の場合に設定される縮小率kと同じ値が使用される。本実施例ではth_k=1/4が使用される。
縮小&歪曲補正部104は、入力画像信号が歪んだ画像の信号である場合に、入力画像
信号に歪み補正処理を施す。そして、縮小&歪曲補正部104は、歪み補正処理後の画像信号に縮小処理を施す。それにより、縮小&歪曲補正部104は、動きベクトル検出用フレームSFを生成する。縮小&歪曲補正部104は、撮影領域情報、歪曲収差情報、レンズの種類、縮小率k(補間方式決定部103から入力された縮小率)に従って、フレームF(n)を動きベクトル検出用フレームSF(n)に変換する。
具体的には、レンズの種類が魚眼レンズの場合、縮小&歪曲補正部104は、F(n)から撮影領域情報で表される領域の画像信号を抽出する。そして、縮小&歪曲補正部104は、抽出した画像信号に、歪曲補正処理と縮小処理を施す。歪曲補正処理は、歪曲収差情報の(x’,y’)=g(x,y)に従って行われる。縮小処理は、補間方式決定部103から入力された縮小率kに従って行われる。具体的には、歪曲補正処理が施された画像信号の垂直方向及び垂直方向の画像サイズが、それぞれ、k0.5倍に縮小される。縮小方法はどのような方法であってもよい。例えば、縮小&歪曲補正部104は、バイリニア法を用いた縮小処理を行う。そして、歪曲補正処理及び縮小処理後の画像信号が、SF(n)とされる。
レンズ種類が魚眼レンズ以外の場合は、縮小&歪曲補正部104は、F(n)に対して縮小処理のみを施す。それにより、SF(n)が生成される。
縮小&歪曲補正部104は、生成したSF(n)をフレームメモリ制御部105に出力する。フレームメモリ制御部105は、縮小&歪曲補正部104から出力されたSF(n)を記憶する。
入力画像信号が歪んだ画像の信号でない場合には、F(n)から検出した動きベクトルをそのまま使用して補間フレームを生成することができる。具体的には、F(n)の画素を、当該画素の位置から動きベクトルの1/2の位置の画素とすることにより、補間フレームAF(n)の画素を生成することができる。しかしながら、入力画像信号が歪んだ画像の信号である場合には、移動する物体の軌跡は直線的にはならず、歪んだ軌跡となる。そのため、F(n)から検出した動きベクトルをそのまま使用して補間フレームを生成すると、補間フレームの画像として破綻した画像が生成されてしまう。そこで、本実施例では、入力画像信号が歪んだ画像の信号である場合に、歪み補正処理後の画像信号から動きベクトルを検出する。そして、入力画像信号の画像の歪み方に従って、検出された動きベクトルを歪ませる(歪み処理)。そのように歪まされた動きベクトルを使用することにより、F(n)における物体の画素を、当該物体の移動の軌跡に従った位置に適用することができ、補間フレームAF(n)の画像として正確な画像(破綻していない画像)を生成することができる。
動きベクトル検出部106は、歪みの無い画像の信号から動きベクトルを検出する。即ち、入力画像信号が歪んだ画像の信号である場合には、歪み補正処理後の画像信号から動きベクトルが検出される。具体的には、動きベクトル検出部106は、動きベクトル検出用フレームSF(n)とSF(n+1)から動きベクトルを検出し、検出した動きベクトルから補間ベクトルを求める。補間ベクトルは、動きベクトル検出用フレーム内の領域の、補間フレーム内での位置(補間位置)を示すベクトルである。
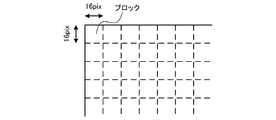
具体的には、動きベクトル検出部106は、ブロックマッチング法を用いて動きベクトルを検出する。ブロックマッチングでは、まず、図8に示すように、フレームSF(n)が複数のブロックに分割される。本実施例では、1つのブロックのサイズを水平方向16ピクセル×垂直方向16ピクセルとする。そして、ブロック毎に、そのブロック内の画像(SF(n)内の一部の領域の画像)と最も類似度が高い画像の領域(対応領域)が、SF(n+1)から探索される。本実施例では、処理対象のブロックの中心位置から水平方向112ピクセル×垂直方向48ピクセルの領域(図9)が探索領域とされる。そして、探索領域内から、処理対象のブロックに対応する対応領域が探索される。本実施例では、
処理対象のブロック内の画素値(SF(n)の画素値)との差分絶対値和(Sum of
Absolute Differences:SAD)が最も小さい領域が対応領域とされる。SADが所定の閾値より小さい場合に、処理対象のブロックの位置から、当該ブロックに対応する対応領域の位置へのベクトルが、当該ブロックの動きベクトルとされる。SADが所定の閾値以上の場合は、処理対象のブロックに対して、画像の動きは無いと判定され、大きさが0の動きベクトル(0ベクトル)が割り当てられる。上記処理が全てのブロックについて行われ、ブロック毎の動きベクトルが求められる。ここで、SF(n)におけるブロックblkの動きベクトルをV(n,blk)と表記する。また、SF(n)におけるブロック毎の動きベクトルの集合を{V(n)}と表記する。
次に、動きベクトル検出部106は、動きベクトル{V(n)}から補間ベクトル{E(n)}を算出する。補間ベクトル{E(n)}は、ブロック毎の補間ベクトルの集合である。補間位置は動きベクトルの始点と終点とつなぐ直線の中点となる。しかし、動きベクトル{V(n)}は縮小処理後の画像信号から検出されている。そこで、本実施例では、動きベクトル{V(n)}を縮小率kに応じて拡大し、拡大された動きベクトルの大きさを1/2にすることにより、補間ベクトル{E(n)}を求める。なお、補間ベクトル{E(n)}の始点は、動きベクトル{V(n)}の始点と同じ位置とされるものとする。具体的には、補間ベクトル{E(n)}は以下の式2により求められる。
{E(n)}={V(n)}/k0.5/2 ・・・(式2)
歪曲補間ベクトル&拡縮率算出部107は、入力画像信号が歪んだ画像の信号である場合に、歪曲補間ベクトル算出処理と、拡縮率算出処理とを行う。
まず、歪曲補間ベクトル算出処理について説明する。
歪曲補間ベクトル算出処理は、補間ベクトル{E(n)}から歪曲補間ベクトル{Z(n)}を算出する処理である。補間ベクトル{E(n)}は通常座標でのベクトルである。歪曲補間ベクトル{Z(n)}は、歪曲座標でのベクトルである。歪曲補間ベクトル算出処理は、歪曲収差情報に従って補間ベクトル{E(n)}の始点と終点の座標を通常座標から歪曲座標に変換することにより、歪曲補間ベクトル{Z(n)}を求める(補間ベクトル{E(n)}を歪曲補間ベクトル{Z(n)}に変換する)。
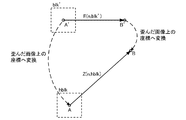
変換方法について図10を用いて具体的に説明する。図10中、通常座標A’はブロックblk’の中心座標である。通常座標B’は、ブロックblk’の補間ベクトルE(n,blk’)により指し示される位置である(ブロックblk’のサイズは16×16pix)。歪曲補間ベクトル&拡縮率算出部107は、歪曲収差情報の(x,y)=f(x’,y’)を用いて、通常座標A’,B’を歪曲座標A,Bに変換する。そして、歪曲補間ベクトル&拡縮率算出部107は、歪曲座標Aを中心としたブロックhblk(サイズは16×16pix)を設定する。歪曲補間ベクトル&拡縮率算出部107は、歪曲座標Aから歪曲座標Bへ向かうベクトルZ(n,hblk)をブロックhblkの歪曲補間ベクトルとして設定する。歪曲補間ベクトル&拡縮率算出部107は、上記処理をすべての補間ベクトルについて行い、F(n)の歪曲補間ベクトル{Z(n)}を求める。
画像の歪みの度合いは、歪曲座標の位置によって異なる。そのため、ブロックhblkの画像をそのまま歪曲座標Bに適用すると、補間フレームの画像が破綻してしまう。そこで、本実施例では、歪曲補間ベクトルの始点位置のブロックの画像を、歪曲補間ベクトルの終点位置に適用する際に、当該ブロックの画像に拡大処理または縮小処理を施す。拡縮率算出処理では、上記拡大処理や縮小処理の倍率(拡大率・縮小率)を求める。ここでは、拡大率と縮小率を合わせて“拡縮率”と呼ぶ。
まず、歪曲補間ベクトル&拡縮率算出部107は、図11に示すように、通常座標A’
を中心としたブロックblk’と通常座標B’を中心としたブロックblk’2を設定する。ブロックblk’のサイズと、ブロックblk’2のサイズは、いずれも、16×16pixとする。そして、歪曲補間ベクトル&拡縮率算出部107は、ブロックblk’とブロックblk’2を、歪曲収差情報(x,y)=f(x’,y’)を用いて歪曲座標のブロックに変換する。図11の例では、ブロックblk’がブロックblkに変換され、ブロックblk’2がブロックblk2に変換される。
次に、歪曲補間ベクトル&拡縮率算出部107は、ブロックblkとブロックblk2のサイズを求める。具体的には、図12に示すように、歪曲座標A(ブロックblkの中心)の垂直位置におけるブロックblkの水平方向の長さが、ブロックblkの水平方向サイズblk_h_lenとして求められる。歪曲座標Aの水平位置におけるブロックblkの垂直方向の長さが、ブロックblkの垂直方向サイズblk_v_lenとして求められる。同様に、ブロックblk2の水平方向サイズblk2_h_lenと垂直方向サイズblk2_v_lenも求められる。
そして、歪曲補間ベクトル&拡縮率算出部107は、ブロックhblkの水平方向の拡縮率ghと垂直方向の拡縮率gvを以下の式3−1,3−2を用いて算出する。
gh=blk2_h_len/blk_h_len ・・・(式3−1)
gv=blk2_v_len/blk_v_len ・・・(式3−2)
ここでは、ブロックhblkのghとgvを合わせて拡縮率L(n,blkh)と表記する。そして、歪曲補間ベクトル&拡縮率算出部107は、上記処理をすべての歪曲補間ベクトル(歪曲補間ベクトル算出処理において歪曲補間ベクトルの始点に設定されたブロック)について行い、F(n)の拡縮率{L(n)}を求める。
なお、実際には、通常座標上の四角形のブロックを歪曲座標上のブロックに変換した場合、変換後のブロックは四角形のブロックにはならない。本実施例では、計算を簡略化するため変換後のブロックの形状を四角形に近似している。
補間フレーム生成部108は、入力画像信号のフレーム間を補間する補間フレームを生成する。本実施例では、入力画像信号が歪んだ画像の信号である場合には、入力画像信号と、歪ませられた動きベクトルとから、入力画像信号のフレーム間を補間する補間フレームが生成される。
具体的には、補間フレーム生成部108は、フレームF(n),F(n+1)、補間方式m、境界情報kz、補間ベクトル{E(n)}、歪曲補間ベクトル{Z(n)}、拡縮率{L(n)}を用いて、補間フレームAF(n)を生成する。
補間方式mが“魚眼動きベクトル補間”の場合は、歪曲補間ベクトル{Z(n)}に対応する各ブロックのF(n)上の画像が、拡縮率{L(n)}に従って拡大・縮小処理される。そして、拡大・縮小処理後の画像が、補間フレームAF(n)の画像として歪曲補間ベクトル{Z(n)}で示される位置に貼り付けられる。拡大・縮小処理は、例えば、バイリニア法を用いて行われる。即ち、本実施例では、入力画像信号のフレーム内の一部の領域の画像の位置を、歪ませられた動きベクトルに従って変更することにより、補間フレーム内の一部の領域の画像が決定される。そして、画像の位置を変更する際に、入力画像信号の画像の歪み方に従って、位置を変更する画像のサイズが変更される。拡大・縮小処理後の画像を貼り付けた際に、複数の画像が重複する位置については、重複する画像の画素値の平均値が適用される。画像が貼り付けられなかった位置は、当該位置と同じ位置
のF(n)とF(n+1)の画素値の平均値が適用される。また、補間フレーム生成部108は、境界情報kzからケラレ部分(非撮影領域)を判断する。そして、補間フレーム生成部108は、ケラレ部分についてはベクトル補間(歪曲補間ベクトル{Z(n)}に応じた画像の貼り付け)を行わずに、F(n)の画素値を適用する。即ち、本実施例では、撮影領域に対しては、歪ませられた動きベクトルを用いて補間フレームの画素値が決定され、非撮影領域に対しては、補間フレームの画素値として同じ位置の入力画像信号の画素値が適用される。これにより、非撮影領域(ケラレ部分)や非撮影領域と撮影領域の境界が誤補間によって乱れることを抑制することができる。以上により、補間フレームが生成される。
補間方式mが“通常動きベクトル補間”の場合には、補間ベクトル{E(n)}に従って補間フレームが生成される。具体的には、補間ベクトル{E(n)}に対応する各ブロックのF(n)上の画像が、補間フレームAF(n)の画像として補間ベクトル{E(n)}で示される位置に貼り付けられる。複数の画像が重複する位置、画像が貼り付けられなかった位置については、“魚眼動きベクトル補間”の場合と同様に処理される。
補間方式mが“2度出し補間”の場合には、補間フレームAF(n)は出力端子から出力されないため、補間フレームAF(n)は生成されない。
また、本実施例によれば、入力画像信号のフレーム内の一部の領域の画像の位置を変更して補間フレーム内の一部の領域の画像を決定する際に、入力画像信号の画像の歪み方に従って、位置を変更する画像のサイズが変更される。それにより、補間フレームの画像の乱れをより抑制することができる。なお、このようなサイズの変更は行わなくてもよい。そのような構成であっても、歪まされた動きベクトルを用いることにより、従来よりも補間フレームの画像の乱れを抑制することができる。
また、本実施例によれば、縮小処理が施された歪み補正処理後の画像信号から動きベクトルが検出されるため、動きベクトル検出用フレームのデータ量を低減することができ、且つ、動きベクトル検出処理の処理負荷を低減することができる。また、対応可能な歪曲度合いの範囲を広げることができる。なお、データ記憶容量が十分に大きく、データの処理能力が十分に高い場合には、縮小処理は行われなくてもよい。
また、本実施例によれば、縮小処理の縮小率が所定の閾値未満である場合に、入力画像信号のフレームが、入力画像信号のフレーム間を補間する補間フレームとされる。それにより、動きベクトルの誤検出によって生じる画像の破綻を抑制することができる。なお、入力画像信号が歪んだ画像の信号である場合には、縮小処理の縮小率によらず“魚眼動きベクトル補間”が設定されてもよい。
なお、本実施例では、撮影領域の画像信号から動きベクトルを検出する構成としたが、この構成に限らない。例えば、入力画像信号の全画像領域に対して歪み補正処理が施され、上記全画像領域に対応する歪み補正処理後の画像信号から動きベクトルが検出されてもよい。
なお、本実施例では、撮影領域に対しては、歪ませられた動きベクトルを用いて補間フレームの画素値を決定し、非撮影領域に対しては、補間フレームの画素値として同じ位置
の入力画像信号の画素値を適用する構成としたが、この構成に限らない。全画像領域に対して、歪ませられた動きベクトルを用いて補間フレームの画素値が決定されてよい。
本発明の実施例2に係る画像処理装置及び画像処理方法について図を参照して説明する。実施例1では、入力画像信号のフレーム内の座標を起点として補間フレームを生成したが、実施例2では、生成対象の補間フレーム内の座標を起点として補間フレームを生成する。
図13は、本実施例に係る画像処理装置の機能構成の一例を示すブロック図である。本実施例に係る画像処理装置は、ケラレ検出部101、縮小率算出部102、補間方式決定部103、縮小&歪曲補正部104、フレームメモリ制御部105、動きベクトル検出部106、歪曲補間ベクトル算出部201、補間フレーム生成部202、などを有する。実施例1と同じ機能部については、同じ符号を付し、説明を省略する。
歪曲補間ベクトル算出部201は、実施例1の歪曲補間ベクトル&拡縮率算出部107の歪曲補間ベクトル算出処理と同様の処理を行う。歪曲補間ベクトル算出部201は、実施例1の歪曲補間ベクトル&拡縮率算出部107の拡縮率算出処理は行わない。
補間フレーム生成部202は、フレームF(n),F(n+1)、補間方式m、境界情報kz、補間ベクトル{E(n)}、歪曲補間ベクトル{Z(n)}、歪曲収差情報から補間フレームAF(n)を生成する。
補間方式mが“魚眼動きベクトル補間”の場合について説明する。
実施例1では、歪曲補間ベクトルから、フレームF(n)内の画素位置に対応する補間フレームAF(n)内の画素位置を判断し、フレームF(n)内の一部の領域(ブロック)の画像の位置を変更して、補間フレームを生成した。実施例2では、歪曲補間ベクトルから、生成対象の補間フレームAF(n)内の画素位置に対応するフレームF(n)内の画素位置を判断し、判断結果に従ってフレームF(n)内の画素値を用いて補間フレームを生成する。
図14を用いて具体的に説明する。
歪曲補間ベクトルZ(n,blk1)から、F(n)上の歪曲座標AとAF(n)上の歪曲座標Bの対応が取れている。AF(n)上のブロックblk2内の画像を決定するために、補間フレーム生成部202は、ブロックblk2内の画素位置毎に、その画素位置の画素値を求める。ブロックblk2は、歪曲座標Bに対応する標準座標B’を中心として設定されたブロック(標準座標のブロック)を歪ませて得られる歪曲座標のブロックであってもよいし、歪曲座標Bを中心として設定されたブロック(例えば、水平方向16ピクセル×垂直方向16ピクセルのブロック)であってもよい。
ブロックblk2の左上端の歪曲座標p0の画素値を求める場合、まず、歪曲座標p0が歪曲収差情報(x’,y’)=g(x,y)に従って通常座標p0’に変換される。
次に、歪曲補間ベクトルZ(n,blk1)に対応する補間ベクトルE(n,blk1’)用いて、通常座標p0’を始点としてベクトル−E(n,blk1’)によって示される通常座標q0’が求められる。ベクトル−E(n,blk1’)は、補間ベクトルE(n,blk1’)と同じ大きさで向きが逆のベクトルである。
そして、歪曲収差情報(x,y)=f(x’,y’)に従って、通常座標q0’が歪曲座標q0に変換される。歪曲座標q0から歪曲座標p0へのベクトルは、歪曲座標q0(歪曲座標p0)に対する歪曲補間ベクトルである。
歪曲座標q0から歪曲座標p0へのベクトルは、歪曲座標q0(歪曲座標p0)に対応する歪曲補間ベクトルである。そこで、本実施例では、フレームF(n)上の歪曲座標q0の画素値が、補間フレームAF(n)上の歪曲座標p0に補間する画素値とされる。こ
の処理が全ての画素位置(全てのブロック内の全ての画素位置)に対して行われ、補間フレームAF(n)が生成される。
補間方式mが“通常動きベクトル補間”の場合、及び、補間方式mが“2度出し補間”の場合には、実施例1と同様の処理が行われる。“通常動きベクトル補間”の場合には、“魚眼動きベクトル補間”と同様に、生成対象の補間フレーム内の位置に対応する入力画像信号のフレーム内の位置を判断して補間フレームが生成されてもよい。
具体的には、本実施例によれば、歪曲収差情報を用いて、補間フレームの画素位置に対応する入力画像信号のフレームの画素位置が求められる。これは、画素位置毎に歪曲補間ベクトルを求めること(歪ませられた動きベクトルとして、画素位置毎の動きベクトルを求めること)と等価である。そして、画素位置毎に歪曲補間ベクトルに従って補間フレームが生成される。それにより、複数画素位置毎の歪曲補間ベクトルを用いた場合よりも補間フレームの画像の破綻を抑制することができる。
なお、補間フレームの画素位置に対応する入力画像信号のフレームの画素位置を求める処理、即ち、画素位置毎に歪曲補間ベクトルを求める処理は、補間フレーム生成部ではなく、歪曲補間ベクトル算出部201で行われてもよい。
本発明の実施例1に係る画像処理装置及び画像処理方法について図を参照して説明する。実施例1,2では、動きベクトルを歪ませて入力画像信号のフレーム間を補間する補間フレームを生成した。実施例3では、画像の歪みが補正された画僧信号間を補間する補間フレーム(通常補間フレーム)を生成し、通常補間フレームを歪ませて入力画像信号のフレーム間を補間する補間フレーム(歪み補間フレーム)を生成する。
図15は、本実施例に係る画像処理装置の機能構成の一例を示すブロック図である。本実施例に係る画像処理装置は、ケラレ検出部101、縮小率算出部102、補間方式決定部103、縮小&歪曲補正部104、フレームメモリ制御部105、動きベクトル検出部106、補間フレーム生成部301、拡大&歪曲化部302、などを有する。実施例1,2と同じ機能部ついては、同じ符号を付し、説明を省略する。
補間フレーム生成部301は、歪み補正処理後の画像信号と、動きベクトル検出部106で検出された動きベクトルとから、歪み補正処理後の画像信号のフレーム間を補間する補間フレーム(通常補間フレーム)を生成する。
具体的には、補間フレーム生成部301は、フレームF(n)、F(n+1)、SF(n)、SF(n+1)、補間方式m、縮小率k、補間ベクトル{E(n)}、から補間フレームAF(n)またはASF(n)を生成する。
補間方式mが“魚眼動きベクトル補間”の場合は、補間フレーム生成部301は、動きベクトル検出用フレームSF(n),SF(n+1)、補間ベクトル{E(n)}を用いて補間フレームASF(n)を生成する。補間フレームの生成方法は、実施例1,2の“通常動きベクトル補間”の場合と同様である。例えば、補間ベクトル{E(n)}に対応する各ブロックのSF(n)上の画像が、補間フレームASF(n)の画像として補間ベクトル{E(n)}で示される位置に貼り付けられる。
なお、SF(n)、SF(n+1)が通常座標の縮小された画像である場合には、補間フレームASF(n)も通常座標の縮小された画像となる。そのような場合には、補間ベクトル{E(n)}は縮小されたベクトルではないため、補間ベクトル{E(n)}は、k0.5倍されて使用される。
なお、補間フレーム生成部301は、撮影領域に対して、動きベクトル検出部106で
検出された動きベクトルを用いて補間フレームの画素値を決定することが好ましい。そして、補間フレーム生成部301は、非撮影領域に対して、補間フレームの画素値として同じ位置の歪み補正処理後の画像信号の画素値を適用することが好ましい。それにより、非撮影領域や非撮影領域と撮影領域の境界が誤補間によって乱れることを抑制することができる。
なお、動きベクトル検出用フレームSFの画像は、撮影領域の画像であってもよいし、撮影領域と非撮影領域を含む画像であってもよい。例えば、動きベクトル検出用フレームSFは、入力画像信号のフレームの全領域に対して歪み補正処理を施して得られる画像であってもよい。動きベクトル検出用フレームSFの画像が撮影領域の画像(非撮影領域が除外された画像)である場合には、動きベクトル検出用フレームSFの画像に非撮影領域の画像を付加して補間フレームASF(n)が生成される。
補間方式mが“通常動きベクトル補間”の場合は、補間フレーム生成部301は、フレームF(n),F(n+1)、補間ベクトル{E(n)}を用いて補間フレームAF(n)を生成する。補間フレームの生成方法は、実施例1,2と同様である。
補間方式mが“2度出し補間”の場合は、実施例1,2と同様に、補間フレーム生成部301は、補間フレームを生成しない。
補間フレームASF(n)は、歪みの無い補間フレーム(通常補間フレーム)である。拡大&歪曲化部302は、入力画像信号の画像の歪み方に従って、補間フレームASF(n)を歪ませることにより、入力画像信号のフレーム間を補間する補間フレームAF(n)(歪み補間フレーム)を生成する。
具体的には、拡大&歪曲化部302は、補間フレームASF(n)、補間方式m、縮小率k、歪曲収差情報から、補間フレームAF(n)を生成する。
補間方式mが“魚眼ベクトル補間”の場合には、拡大&歪曲化部302は、補間フレームASF(n)に対して拡大処理と歪曲化処理を施す。拡大処理は、補間フレームASF(n)の水平方向サイズと水力方向サイズを、それぞれ、1/k0.5倍に拡大する処理である。拡大処理は、例えば、バイリニア法を用いて行われる。歪曲化処理は、拡大処理後の画像信号の画像を歪ませる処理である。歪曲化処理は、歪曲収差情報の(x,y)=f(x’,y’)に従って行われる。を利用してみのある画像に変換する。補間フレームASF(n)に対して拡大処理と歪曲化処理を施すことにより、補間フレームAF(n)が生成される。
補間方式mが“通常ベクトル補間”の場合には、フレームメモリ制御部にはすでに補間フレーム生成部301で生成された補間フレームAF(n)が記憶されているため、拡大&歪曲化部302は、補間フレームAF(n)を生成しない。
補間方式mが“2度出し補間”の場合には、拡大&歪曲化部302は、補間フレームAF(n)を生成しない。
なお、補間フレーム生成部301は、補間フレームASFとして、縮小されていない画像が生成されてもよい。例えば、動きベクトル検出用フレームSFが縮小された画像である場合には、補間フレーム生成部301は、動きベクトル検出用フレームSFに拡大処理を施し、拡大されたSFから補間フレームASFが生成されてもよい。また、補間フレーム生成部301は、動きベクトル検出用フレームSFから生成した補間フレーム(縮小さ
れた画像)に対して拡大処理を施して、補間フレームASFを生成してもよい。また、動きベクトル検出用フレームSFの画像は、縮小処理が施されていない画像であってもよい。それらの場合には、フレーム拡大&歪曲化部302による拡大処理は不要となる。
本発明の実施例4に係る画像処理装置及び画像処理方法について図を参照して説明する。
図16は、本実施例に係る画像処理装置の機能構成の一例を示すブロック図である。本実施例に係る画像処理装置は、縮小部401、補間方式決定部402、フレームメモリ制御部105、動きベクトル検出部403、補間フレーム生成部404、などを有する。実施例1〜3と同じ機能部については、同じ符号を付し、説明を省略する。
縮小部401は、入力画像信号のフレームF(n)を縮小し、動きベクトル検出用フレームSF(n)を生成する。本実施例では、フレームF(n)の水平方向サイズと垂直方向サイズがそれぞれ1/2倍に縮小されるものとする。なお、縮小率は1/2より大きくても小さくてもよい。縮小率は、フレームF(n)の画像サイズに応じて変更されてもよい。縮小処理は、例えば、バイリニア法を用いて行われる。
動きベクトル検出部403は、動きベクトル検出用フレームSF(n),SF(n+1)から動きベクトル{V(n)}を求める。動きベクトルの検出方法は、他の実施例と同様である。また、本実施例では、動きベクトル検出用フレームSF(n)、SF(n+1)は、フレームF(n)の水平方向サイズと垂直方向サイズをそれぞれ1/2倍に縮小したものである。そのため、本実施例では、動きベクトル{V(n)}がそのまま補間ベクトル{E(n)}とされる。
補間フレーム生成部404は、補間方式mが“通常動きベクトル補間”である場合に、動きベクトル検出部403で検出された動きベクトルを用いて、入力画像信号のフレーム間を補間する補間フレームを生成する(第1生成処理)。具体的には、補間方式mが“通常動きベクトル補間”である場合に、フレームF(n),F(n+1)、補間ベクトル{E(n)}から補間フレームAF(n)が生成される。補間フレームAF(n)の生成方法は、他の実施例と同じである。
補間方式mが“2度出し補間”である場合には、補間フレーム生成部404は、補間フレームAFを生成しない。補間方式mが“2度出し補間”である場合には、実施例1で述べたように、入力画像信号のフレームが、入力画像信号のフレーム間を補間する補間フレームとされる(第2生成処理)。
補間方式決定部402は、レンズ情報または歪曲収差情報に応じて補間方式mを決定する。それにより、第1生成処理で補間フレームを生成するか、第2生成処理で補間フレームを生成するかが制御される。
補間方式決定部402は、レンズ情報から、入力画像信号が歪んだ画像の信号か否かを判断する。入力画像信号が歪んだ画像の信号である場合には、補間方式決定部402は、補間方式mとして“2度出し補間”を設定する。入力画像信号が歪んだ画像の信号でない場合には、補間方式決定部402は、補間方式mとして“通常動きベクトル補間”を設定する。例えば、レンズ情報が、標準レンズ、望遠レンズ、マクロレンズを示す場合には、
補間方式決定部402は、入力画像信号が歪んだ画像の信号でないと判断する。レンズ情報が、魚眼レンズ、広角レンズを示す場合には、補間方式決定部402は、入力画像信号が歪んだ画像の信号であると判断する。
即ち、入力画像信号が歪んだ画像の信号でない場合に第1生成処理で補間フレームが生成され、入力画像信号が歪んだ画像の信号である場合に第2生成処理で補間フレームが生成されるように、補間フレームの生成が制御される。
補間方式決定部402は、歪曲収差情報から、入力画像信号で表される画像の歪みの度合いを判断する。画像の歪みの度合いが所定の閾値より大きい場合には、補間方式決定部402は、補間方式mとして“2度出し補間”を設定する。画像の歪みの度合いが所定の閾値未満の場合には、補間方式決定部402は、補間方式mとして“通常動きベクトル補間”を設定する。画像の歪みの度合いは、例えば、入力画像信号の画素毎の通常座標と歪曲座標の差の最大値、最小値、平均値などである。
即ち、画像の歪みの度合いが所定の閾値以下である場合に第1生成処理で補間フレームが生成され、画像の歪みの度合いが所定の閾値より大きい場合に第2生成処理で補間フレームが生成されるように、補間フレームの生成処理が制御される。
具体的には、画像の歪みがない場合には、動きベクトルで示される補間位置は正確な位置となるため、補間フレームの画像が乱れない。そのような場合に、動きベクトルに従って補間フレームを生成することで、動画像の動きの滑らかさを高め、且つ、フリッカを低減することができる。また、画像の歪みがある場合には、動きベクトルで示される補間位置は正確な位置とならないため、補間フレームの画像が乱れる虞がある。そのような場合に、入力画像信号のフレームを補間フレームとすることにより、補間フレームの画像が破綻することを抑制することができ、動画像が破綻することを抑制することができる。
また、画像の歪みの度合いが小さい場合には、動きベクトルで示される補間位置が正確な位置からずれていたとしても、そのずれは小さいため、補間フレームの画像の乱れは小さい。そのような場合に、動きベクトルに従って補間フレームを生成することで、動画像の動きの滑らかさの向上、及び、フリッカの低減の効果を優先して得ることができる。また、画像の歪みの度合いが大きい場合には、補間フレームの画像が大きく乱れる虞がある。そのような場合に、入力画像信号のフレームを補間フレームとすることにより、補間フレームの画像が破綻することを抑制することができ、動画像が破綻することを抑制することができる。
また、ブロックサイズ、ブロックマッチングにおける探索領域のサイズ、動きベクトル検出用フレームのデータサイズ等は、実施例で例示した値に限定されるものではなく、適宜設定、変更されるものである。
また、縮小処理や拡大処理は、バイリニア法を用いた方法に限らない。縮小処理や拡大処理は、バイリニア法以外の方法、例えば、バイキュービック法を用いて行われてもよい。
また、歪みのある画像の信号は、魚眼レンズを用いて撮影された画像信号に限らない。意図的な歪みのある画像の信号であれば、魚眼レンズ以外のレンズを用いて撮影された画
像信号であってもよい。例えば、歪みのある画像の信号は、広角レンズを用いて撮影された画像信号であってもよい。
106 動きベクトル検出部
107 歪曲補間ベクトル&拡縮率算出部
108 補間フレーム生成部
201 歪曲補間ベクトル算出部
202 補間フレーム生成部
301 補間フレーム生成部
302 歪曲化部
402 補間方式決定部
403 ベクトル検出部
404 補間フレーム生成部
Claims (19)
- 入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理装置であって、
前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正手段と、
前記歪み補正処理後の画像信号から動きベクトルを検出する検出手段と、
前記入力画像信号の画像の歪み度合いに応じて、前記検出手段で検出された動きベクトルを歪ませる歪み処理手段と、
前記入力画像信号と、前記歪み処理手段で歪ませられた動きベクトルとから、前記入力画像信号のフレーム間を補間する補間フレームを生成する生成手段と、
を有することを特徴とする画像処理装置。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記生成手段は、前記撮影領域に対しては、前記歪み処理手段で歪ませられた動きベクトルを用いて補間フレームの画素値を決定し、前記非撮影領域に対しては、補間フレームの画素値として同じ位置の前記入力画像信号の画素値を適用する
ことを特徴とする請求項1に記載の画像処理装置。 - 前記生成手段は、前記入力画像信号のフレーム内の一部の領域の画像の位置を、前記歪み処理手段で歪ませられた動きベクトルに従って変更することにより、補間フレーム内の一部の領域の画像を決定するものであり、画像の位置を変更する際に、前記入力画像信号の画像の歪み度合いに応じて、位置を変更する画像のサイズを変更する
ことを特徴とする請求項1または2に記載の画像処理装置。 - 前記歪み処理手段は、歪ませられた動きベクトルとして、画素位置毎の動きベクトルを求める
ことを特徴とする請求項1〜3のいずれか1項に記載の画像処理装置。 - 入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理装置であって、
前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正手段と、
前記歪み補正処理後の画像信号から動きベクトルを検出する検出手段と、
前記歪み補正処理後の画像信号と、前記検出手段で検出された動きベクトルとから、前記歪み補正処理後の画像信号のフレーム間を補間する補間フレームを生成する生成手段と、
前記入力画像信号の画像の歪み度合いに応じて、前記生成手段で生成された補間フレームを歪ませることにより、前記入力画像信号のフレーム間を補間する補間フレームを生成する歪み処理手段と、
を有することを特徴とする画像処理装置。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記生成手段は、前記撮影領域に対しては、前記検出手段で検出された動きベクトルを用いて補間フレームの画素値を決定し、前記非撮影領域に対しては、補間フレームの画素値として同じ位置の前記歪み補正処理後の画像信号の画素値を適用する
ことを特徴とする請求項5に記載の画像処理装置。 - 前記検出手段は、縮小処理が施された歪み補正処理後の画像信号から動きベクトルを検出する
ことを特徴とする請求項1〜6のいずれか1項に記載の画像処理装置。 - 前記縮小処理の縮小率が所定の閾値未満である場合には、前記入力画像信号のフレームが、前記入力画像信号のフレーム間を補間する補間フレームとされる
ことを特徴とする請求項7に記載の画像処理装置。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記検出手段は、前記撮影領域の画像信号から動きベクトルを検出する
ことを特徴とする請求項1〜8のいずれか1項に記載の画像処理装置。 - 入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理方法であって、
コンピュータが、前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正ステップと、
コンピュータが、前記歪み補正処理後の画像信号から動きベクトルを検出する検出ステップと、
コンピュータが、前記入力画像信号の画像の歪み度合いに応じて、前記検出ステップで検出された動きベクトルを歪ませる歪み処理ステップと、
コンピュータが、前記入力画像信号と、前記歪み処理ステップで歪ませられた動きベクトルとから、前記入力画像信号のフレーム間を補間する補間フレームを生成する生成ステップと、
を有することを特徴とする画像処理方法。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記生成ステップでは、前記撮影領域に対しては、前記歪み処理ステップで歪ませられた動きベクトルを用いて補間フレームの画素値が決定され、前記非撮影領域に対しては、
補間フレームの画素値として同じ位置の前記入力画像信号の画素値が適用される
ことを特徴とする請求項10に記載の画像処理方法。 - 前記生成ステップでは、前記入力画像信号のフレーム内の一部の領域の画像の位置を、前記歪み処理ステップで歪ませられた動きベクトルに従って変更することにより、補間フレーム内の一部の領域の画像が決定され、画像の位置を変更する際に、前記入力画像信号の画像の歪み度合いに応じて、位置を変更する画像のサイズが変更される
ことを特徴とする請求項10または11に記載の画像処理方法。 - 前記歪み処理ステップでは、歪ませられた動きベクトルとして、画素位置毎の動きベクトルが求められる
ことを特徴とする請求項10〜12のいずれか1項に記載の画像処理方法。 - 入力画像信号のフレーム間を補間して、前記入力画像信号のフレームレートを高める画像処理方法であって、
コンピュータが、前記入力画像信号が歪んだ画像の信号である場合に、前記入力画像信号に画像の歪みを補正する歪み補正処理を施す歪み補正ステップと、
コンピュータが、前記歪み補正処理後の画像信号から動きベクトルを検出する検出ステップと、
コンピュータが、前記歪み補正処理後の画像信号と、前記検出ステップで検出された動きベクトルとから、前記歪み補正処理後の画像信号のフレーム間を補間する補間フレームを生成する生成ステップと、
コンピュータが、前記入力画像信号の画像の歪み度合いに応じて、前記生成ステップで生成された補間フレームを歪ませることにより、前記入力画像信号のフレーム間を補間する補間フレームを生成する歪み処理ステップと、
を有することを特徴とする画像処理方法。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記生成ステップでは、前記撮影領域に対しては、前記検出ステップで検出された動きベクトルを用いて補間フレームの画素値が決定され、前記非撮影領域に対しては、補間フレームの画素値として同じ位置の前記歪み補正処理後の画像信号の画素値が適用される
ことを特徴とする請求項14に記載の画像処理方法。 - 前記検出ステップでは、縮小処理が施された歪み補正処理後の画像信号から動きベクトルが検出される
ことを特徴とする請求項10〜15のいずれか1項に記載の画像処理方法。 - 前記縮小処理の縮小率が所定の閾値未満である場合には、前記入力画像信号のフレームが、前記入力画像信号のフレーム間を補間する補間フレームとされる
ことを特徴とする請求項16に記載の画像処理方法。 - 前記入力画像信号が、撮影された画像の領域である撮影領域と、それ以外の領域である非撮影領域とを含む画像の信号である場合に、
前記検出ステップでは、前記撮影領域の画像信号から動きベクトルが検出される
ことを特徴とする請求項10〜17のいずれか1項に記載の画像処理方法。 - 請求項10〜18のいずれか1項に記載の画像処理方法の各ステップをコンピュータに実行させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012109982A JP6091082B2 (ja) | 2012-05-11 | 2012-05-11 | 画像処理装置、画像処理方法、及び、プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012109982A JP6091082B2 (ja) | 2012-05-11 | 2012-05-11 | 画像処理装置、画像処理方法、及び、プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013239791A JP2013239791A (ja) | 2013-11-28 |
| JP2013239791A5 JP2013239791A5 (ja) | 2015-06-25 |
| JP6091082B2 true JP6091082B2 (ja) | 2017-03-08 |
Family
ID=49764491
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012109982A Expired - Fee Related JP6091082B2 (ja) | 2012-05-11 | 2012-05-11 | 画像処理装置、画像処理方法、及び、プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6091082B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111161140B (zh) * | 2018-11-08 | 2023-09-19 | 银河水滴科技(北京)有限公司 | 一种畸变图像的矫正方法及装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008244846A (ja) * | 2007-03-27 | 2008-10-09 | Toshiba Corp | フレーム補間装置及びその方法 |
-
2012
- 2012-05-11 JP JP2012109982A patent/JP6091082B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013239791A (ja) | 2013-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5438579B2 (ja) | 画像処理装置及びその制御方法 | |
| JP4657367B2 (ja) | 画像処理装置、撮像装置、および画像歪み補正方法 | |
| JP5906028B2 (ja) | 画像処理装置、画像処理方法 | |
| JP6326180B1 (ja) | 画像処理装置 | |
| US10306210B2 (en) | Image processing apparatus and image capturing apparatus | |
| US20090225174A1 (en) | Image processing apparatus, image processing method, hand shake blur area estimation device, hand shake blur area estimation method, and program | |
| JP2013218654A (ja) | 画像処理装置 | |
| US20200092467A1 (en) | Image processing apparatus, image processing method, and image processing program | |
| JP4124096B2 (ja) | 画像処理方法および画像処理装置、並びにプログラム | |
| US20150161771A1 (en) | Image processing method, image processing apparatus, image capturing apparatus and non-transitory computer-readable storage medium | |
| JPH11250239A (ja) | Yuvデータによりディストーション補正を行うディジタル撮像装置 | |
| JP6282133B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP7027776B2 (ja) | 移動ベクトル算出方法、装置、プログラム、及びノイズ除去処理を含む移動ベクトル算出方法 | |
| CN103458178A (zh) | 成像设备,成像设备的控制方法和程序 | |
| JP6091082B2 (ja) | 画像処理装置、画像処理方法、及び、プログラム | |
| JP2018033080A (ja) | 画像処理装置、画像処理方法およびプログラム | |
| JP6532328B2 (ja) | 画像処理装置、その制御方法、および制御プログラム | |
| JP5042251B2 (ja) | 画像処理装置および画像処理方法 | |
| JP6274744B2 (ja) | 画像処理装置および画像処理方法 | |
| JP4998134B2 (ja) | 画像処理装置および画像処理方法 | |
| JP6604783B2 (ja) | 画像処理装置、撮像装置および画像処理プログラム | |
| US20210044733A1 (en) | Image pickup apparatus and storage medium | |
| JP4664259B2 (ja) | 画像補正装置および画像補正方法 | |
| JP6016546B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP2009065283A (ja) | 画像ぶれ補正装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150501 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150501 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160607 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170207 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6091082 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |