JP6079449B2 - 画像におけるオブジェクトのエッジを抽出する装置、方法及び電子設備 - Google Patents
画像におけるオブジェクトのエッジを抽出する装置、方法及び電子設備 Download PDFInfo
- Publication number
- JP6079449B2 JP6079449B2 JP2013118722A JP2013118722A JP6079449B2 JP 6079449 B2 JP6079449 B2 JP 6079449B2 JP 2013118722 A JP2013118722 A JP 2013118722A JP 2013118722 A JP2013118722 A JP 2013118722A JP 6079449 B2 JP6079449 B2 JP 6079449B2
- Authority
- JP
- Japan
- Prior art keywords
- edge
- gradient
- region
- determining
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
Description
また、エッジの起点及び終点が確定されている場合、幾つかの制御点を採用して曲線全体を代表するような従来のエッジ抽出技術に比べ、本発明の実施例による、画像におけるオブジェクトのエッジを抽出するための方法は、一つのみの参考点の位置を把握すれば、より正確なエッジを抽出することができ、また、ユーザによる複数回の手動調整を要しないので、処理効率を向上させることができるのみならず、ユーザよる使用にも便利である。
画像におけるオブジェクトのエッジを抽出するための装置であって、
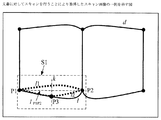
前記画像における前記オブジェクトのエッジの起点及び終点を確定し、前記起点及び前記終点に関連する参考点の位置を確定するための位置確定ユニット;
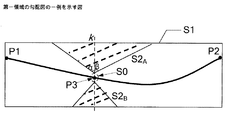
前記エッジの第一方向を確定するための第一方向確定ユニット;
前記第一方向に交差する第二方向を確定するための第二方向確定ユニット;
前記画像において、前記起点、前記終点及び前記参考点を含む第一領域を確定し、前記第一領域の勾配図を取得するための勾配図取得ユニット;
前記第二方向に沿う前記参考点の両側のうちの少なくとも一つの側に、少なくとも一つの第二領域を確定し、前記勾配図において、前記第二領域の勾配に対して減衰を行うための勾配減衰ユニット;及び
減衰後の前記勾配図に基づいて、前記起点と前記終点との間に対してエッジ抽出を行い、前記オブジェクトのエッジを取得するための抽出ユニットを含む、装置。
付記1に記載の装置であって、
前記オブジェクトは文書である、装置。
付記1又は2に記載の装置であって、
前記第一方向確定ユニットは、
前記起点と前記終点との間の連結線の勾配方向を取得し;及び
前記連結線の勾配方向を前記エッジの第一方向として確定する、装置。
付記1〜3の何れか一つに記載の装置であって、
前記第二方向は前記エッジの第一方向に垂直である、装置。
付記1〜4の何れか一つに記載の装置であって、
前記第二領域は、三角形領域、扇形領域、帯状領域、及び放物線形領域のうちの少なくとも一つ、又は、少なくとも二つの組み合わせを含む、装置。
付記1〜5の何れか一つに記載の装置であって、
前記第二領域の形状及び/又は位置は、ユーザによる入力指令によって調整される、装置。
付記1〜6の何れか一つに記載の装置であって、
前記第二領域は前記参考点の所定サイズの隣接する領域の外に位置する、装置。
付記7に記載の装置であって、
前記参考点の所定サイズの隣接する領域は、
前記参考点を含み、長さが前記エッジの第一方向に沿って延伸し、且つ所定サイズを有する帯状領域;又は
前記参考点を円心とする円形領域である、装置。
付記1〜8の何れか一つに記載の装置であって、
前記勾配図が反対色処理を受けている勾配図である場合、減衰後の前記勾配図における前記第二領域の勾配の値は、減衰前の前記勾配図における前記第二領域の勾配の値よりも大きく;及び
前記勾配図が反対色処理を受けていない勾配図である場合、減衰後の前記勾配図における前記第二領域の勾配の値は、減衰前の前記勾配図における前記第二領域の勾配の値よりも小さい、装置。
付記1〜9の何れか一つに記載の装置であって、
前記抽出ユニットは、
前記勾配図が反対色処理を受けている勾配図である場合、前記参考点の勾配の値を第一所定閾値よりも小さい値に設定し、前記勾配図が反対色処理を受けていない勾配図である場合、前記参考点の勾配の値を第二所定閾値よりも大きい値に設定するための勾配設定サブユニット;及び
エッジ追跡方法を用いて、前記起点と前記終点との間に対してエッジ抽出を行い、抽出されたエッジを前記オブジェクトのエッジとして確定するための抽出サブユニットを含む、装置。
付記10に記載の装置であって、
前記勾配設定サブユニットは、さらに、
前記参考点は複数であり、前記複数の参考点には、距離が所定距離範囲内にある2つの参考点が存在する場合、
前記勾配図が反対色処理を受けている勾配図であるとき、前記距離が所定距離範囲内にある2つの参考点の連結線上の点の勾配の値を第三所定隣接領域範囲内の値(例えば、0)に設定し;及び
前記勾配図が反対色処理を受けていない勾配図であるとき、前記距離が所定距離範囲内にある2つの参考点の連結線上の点の勾配の値を第四所定隣接領域範囲内の値(例えば、255)に設定する、装置。
付記1〜11の何れか一つに記載の装置であって、
前記抽出ユニットにより取得された前記オブジェクトのエッジに対してフィッティングを行うためのフィッティングユニットを更に含む、装置。
付記12に記載の装置であって、
前記フィッティングユニットは、
前記抽出ユニットにより取得された前記オブジェクトのエッジに対してフィッティングを行う処理において、前記参考点のウェイトを第三所定閾値よりも大きい値に設定する、装置。
画像におけるオブジェクトのエッジを抽出するための方法であって、
前記画像における前記オブジェクトのエッジの起点及び終点を確定し、前記起点及び前記終点に関連する参考点の位置を確定し;
前記エッジの第一方向を確定し;
前記第一方向に交差する第二方向を確定し;
前記画像において、前記起点、前記終点及び前記参考点を含む第一領域を確定し、前記第一領域の勾配図を取得し;
前記参考点の、前記第二方向に沿う両側のうちの少なくとも一つの側に、少なくとも一つの第二領域を確定し;及び
前記勾配図において、前記第二領域の勾配に対して減衰を行い、減衰後の前記勾配図に基づいて、前記起点と前記終点との間に対してエッジ抽出を行い、前記オブジェクトのエッジを取得することを含む、方法。
付記14に記載の方法であって、
前記オブジェクトは文書である、方法。
付記14又は15に記載の方法であって、
前記エッジの第一方向を確定するステップは、
前記起点と前記終点と間の連結線の勾配方向を取得し;及び
前記連結線の勾配方向を前記エッジの第一方向として確定することを含む、方法。
付記14〜16の何れか一つに記載の方法であって、
前記第二方向は前記エッジの第一方向に垂直である、方法。
付記14〜17の何れか一つに記載の方法であって、
前記第二領域は、三角形領域、扇形領域、帯状領域、及び放物線形領域のうちの少なくとも一つ、又は、少なくとも二つの組み合わせを含む、方法。
付記14〜18の何れか一つに記載の方法であって、
前記第二領域は前記参考点の所定サイズの隣接する領域の外に位置する、方法。
付記19に記載の方法であって、
前記参考点の所定サイズの隣接する領域は、
前記参考点を含み、長さが前記エッジの第一方向に沿って延伸し、且つ所定サイズを有する帯状領域;又は
前記参考点を円心とする円形領域である、方法。
付記14〜20の何れか一つに記載の方法であって、
前記減衰後の勾配図に基づいて前記起点と前記終点との間に対してエッジ抽出を行うステップは、
前記勾配図が反対色処理を受けている勾配図である場合、前記参考点の勾配の値を第一所定閾値よりも小さい値に設定し;
前記勾配図が反対色処理を受けていない勾配図である場合、前記参考点の勾配の値を第二所定閾値よりも大きい値に設定し;及び
エッジ追跡方法を用いて、前記起点と前記終点との間に対してエッジ抽出を行い、抽出されたエッジを前記オブジェクトのエッジとして確定することを含む、方法。
付記14〜21の何れか一つに記載の方法であって、
取得された前記オブジェクトのエッジに対してフィッティングを行うことを更に含む、方法。
付記1〜13の何れか一つに記載の装置を含む、電子設備。
付記23に記載の電子設備であって、
前記電子設備は、スキャナー、カメラ、コンピュータ、携帯電話、タブレットPC、及びPDAのうちの何れか一つである、電子設備。
コンピュータに、付記14〜22の何れか一つに記載の方法を実行させるためのプログラム。
付記25に記載のプログラムを記録したコンピュータ読み取り可能な記憶媒体。
Claims (10)
- 画像におけるオブジェクトのエッジを抽出するための装置であって、
前記画像における前記オブジェクトのエッジの起点及び終点を確定し、前記起点及び前記終点に関連する参考点の位置を確定するための位置確定ユニット;
前記エッジの第一方向を確定するための第一方向確定ユニット;
前記第一方向に交差する第二方向を確定するための第二方向確定ユニット;
前記画像において、前記起点、前記終点及び前記参考点を含む第一領域を確定し、前記第一領域の勾配図を取得するための勾配図取得ユニット;
前記第二方向に沿う前記参考点の両側のうちの少なくとも一つの側に、少なくとも一つの第二領域を確定し、前記勾配図において、前記第二領域の勾配に対して減衰を行うための勾配減衰ユニット;及び
減衰後の前記勾配図に基づいて、前記起点と前記終点との間に対してエッジ抽出を行い、前記オブジェクトのエッジを取得するための抽出ユニットを含む、装置。 - 請求項1に記載の装置であって、
前記第一方向確定ユニットは、
前記起点と前記終点との間の連結線の勾配方向を取得し;及び
前記連結線の勾配方向を前記エッジの第一方向として確定する、装置。 - 請求項1又は2に記載の装置であって、
前記第二領域は、三角形領域、扇形領域、帯状領域、及び放物線形領域のうちの少なくとも一つ、又は、少なくとも二つの組み合わせを含む、装置。 - 請求項1〜3の何れか一つに記載の装置であって、
前記第二領域の形状及び/又は位置は、ユーザによる入力指令によって調整される、装置。 - 請求項1〜4の何れか一つに記載の装置であって、
前記第二領域は前記参考点の所定サイズの隣接する領域の外に位置する、装置。 - 請求項1〜5の何れか一つに記載の装置であって、
前記勾配図が反対色処理を受けている勾配図である場合、減衰後の前記勾配図における前記第二領域の勾配の値は、減衰前の前記勾配図における前記第二領域の勾配の値よりも大きく;及び
前記勾配図が反対色処理を受けていない勾配図である場合、減衰後の前記勾配図における前記第二領域の勾配の値は、減衰前の前記勾配図における前記第二領域の勾配の値よりも小さい、装置。 - 請求項1〜6の何れか一つに記載の装置であって、
前記抽出ユニットは、
前記勾配図が反対色処理を受けている勾配図である場合、前記参考点の勾配の値を第一所定閾値よりも小さい値に設定し、前記勾配図が反対色処理を受けていない勾配図である場合、前記参考点の勾配の値を第二所定閾値よりも大きい値に設定するための勾配設定サブユニット;及び
エッジ追跡方法を用いて、前記起点と前記終点との間に対してエッジ抽出を行い、抽出されたエッジを前記オブジェクトのエッジとして確定するための抽出サブユニットを含む、装置。 - 請求項1〜7の何れか一つに記載の装置であって、
前記抽出ユニットにより取得された前記オブジェクトのエッジに対してフィッティングを行うためのフィッティングユニットを更に含む、装置。 - 画像におけるオブジェクトのエッジを抽出するための方法であって、
前記画像における前記オブジェクトのエッジの起点及び終点を確定し、前記起点及び前記終点に関連する参考点の位置を確定し;
前記エッジの第一方向を確定し;
前記第一方向に交差する第二方向を確定し;
前記画像において、前記起点、前記終点及び前記参考点を含む第一領域を確定し、前記第一領域の勾配図を取得し;
前記第二方向に沿う前記参考点の両側のうちの少なくとも一つの側に、少なくとも一つの第二領域を確定し;及び
前記勾配図において、前記第二領域の勾配に対して減衰を行い、減衰後の前記勾配図に基づいて、前記起点と前記終点との間に対してエッジ抽出を行い、前記オブジェクトのエッジを取得することを含む、方法。 - 請求項1〜8の何れか一つに記載の装置を含む、電子設備。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210187523.2A CN103473543B (zh) | 2012-06-07 | 2012-06-07 | 用于提取图像中对象边界的装置、方法以及电子设备 |
| CN201210187523.2 | 2012-06-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013254490A JP2013254490A (ja) | 2013-12-19 |
| JP6079449B2 true JP6079449B2 (ja) | 2017-02-15 |
Family
ID=48740814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013118722A Active JP6079449B2 (ja) | 2012-06-07 | 2013-06-05 | 画像におけるオブジェクトのエッジを抽出する装置、方法及び電子設備 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9292931B2 (ja) |
| EP (1) | EP2672451A3 (ja) |
| JP (1) | JP6079449B2 (ja) |
| CN (1) | CN103473543B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103455996B (zh) * | 2012-05-31 | 2016-05-25 | 富士通株式会社 | 边缘提取方法和设备 |
| JP6221656B2 (ja) * | 2013-11-08 | 2017-11-01 | 株式会社リコー | 情報処理装置、情報処理方法およびプログラム |
| CN104657730B (zh) * | 2013-11-20 | 2018-01-05 | 富士通株式会社 | 文档图像的校正装置、方法以及扫描仪 |
| CN104899856B (zh) * | 2014-03-07 | 2018-11-27 | 清华大学 | 图像处理方法及装置 |
| CN106251338B (zh) * | 2016-07-20 | 2019-04-30 | 北京旷视科技有限公司 | 目标完整性检测方法及装置 |
| CN108010009B (zh) * | 2017-12-15 | 2021-12-21 | 北京小米移动软件有限公司 | 一种去除干扰图像的方法及装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2918465B2 (ja) * | 1994-11-14 | 1999-07-12 | 大日本スクリーン製造株式会社 | 画像処理方法 |
| JP2000209431A (ja) * | 1999-01-18 | 2000-07-28 | Canon Inc | 輪郭線抽出方法及び記憶媒体 |
| US6381350B1 (en) * | 1999-07-02 | 2002-04-30 | The Cleveland Clinic Foundation | Intravascular ultrasonic analysis using active contour method and system |
| US7003161B2 (en) * | 2001-11-16 | 2006-02-21 | Mitutoyo Corporation | Systems and methods for boundary detection in images |
| ATE550680T1 (de) * | 2003-09-30 | 2012-04-15 | Esaote Spa | Methode zur positions- und geschwindigkeitsverfolgung eines objektrandes in zwei- oder dreidimensionalen digitalen echographischen bildern |
| US20110216984A1 (en) * | 2007-09-20 | 2011-09-08 | Tadanori Tezuka | Image denoising device, image denoising method, and image denoising program |
| AU2009227717B2 (en) * | 2008-03-18 | 2015-02-05 | Elliptic Laboratories As | Object and movement detection |
| JP5414620B2 (ja) * | 2010-05-24 | 2014-02-12 | パナソニック株式会社 | 画像処理装置、画像処理方法、プログラム、及び集積回路 |
| US8571314B2 (en) * | 2010-09-02 | 2013-10-29 | Samsung Electronics Co., Ltd. | Three-dimensional display system with depth map mechanism and method of operation thereof |
| JP5683888B2 (ja) * | 2010-09-29 | 2015-03-11 | オリンパス株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| US9141763B2 (en) * | 2011-02-07 | 2015-09-22 | Siemens Aktiengesellschaft | Method and system for patient-specific computational modeling and simulation for coupled hemodynamic analysis of cerebral vessels |
| JP4918167B1 (ja) * | 2011-03-31 | 2012-04-18 | パナソニック株式会社 | 画像処理装置およびこれを備えた原稿読取システム |
| US8811675B2 (en) * | 2012-03-30 | 2014-08-19 | MindTree Limited | Circular object identification system |
-
2012
- 2012-06-07 CN CN201210187523.2A patent/CN103473543B/zh not_active Expired - Fee Related
-
2013
- 2013-06-05 JP JP2013118722A patent/JP6079449B2/ja active Active
- 2013-06-05 EP EP13170637.6A patent/EP2672451A3/en not_active Withdrawn
- 2013-06-07 US US13/912,805 patent/US9292931B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9292931B2 (en) | 2016-03-22 |
| CN103473543A (zh) | 2013-12-25 |
| EP2672451A3 (en) | 2016-06-15 |
| EP2672451A2 (en) | 2013-12-11 |
| CN103473543B (zh) | 2016-10-05 |
| JP2013254490A (ja) | 2013-12-19 |
| US20130330009A1 (en) | 2013-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6079449B2 (ja) | 画像におけるオブジェクトのエッジを抽出する装置、方法及び電子設備 | |
| US9946954B2 (en) | Determining distance between an object and a capture device based on captured image data | |
| US9275281B2 (en) | Mobile image capture, processing, and electronic form generation | |
| EP2536122B1 (en) | Image processing method, image processing device and scanner | |
| US10187546B2 (en) | Method and device for correcting document image captured by image pick-up device | |
| US9681047B2 (en) | Image feature extraction method and system | |
| RU2621601C1 (ru) | Устранение искривлений изображения документа | |
| CN107066433B (zh) | 偏移图像中的旋转的表格 | |
| EP3182365B1 (en) | Writing board detection and correction | |
| JP6167528B2 (ja) | 画像コーナーを修正する方法及び装置並びに画像処理設備 | |
| CN110827301B (zh) | 用于处理图像的方法和装置 | |
| EP2536123B1 (en) | Image processing method and image processing apparatus | |
| JP2015115067A (ja) | 画像から歪んだ直線を抽出する方法及び装置 | |
| US9129385B2 (en) | Image processing device, image processing method and apparatus for high precision document corners extraction | |
| US9483834B1 (en) | Object boundary detection in an image | |
| JP2019003534A (ja) | 画像処理プログラム、画像処理装置、及び画像処理方法 | |
| CN112434696A (zh) | 一种文本方向校正方法、装置、设备及存储介质 | |
| US10275858B2 (en) | Flattening and rectifying a curved image | |
| JP2017120455A (ja) | 情報処理装置、プログラム及び制御方法 | |
| JP6613625B2 (ja) | 画像処理プログラム、画像処理装置、及び画像処理方法 | |
| WO2024013901A1 (ja) | マッチ率算出装置、マッチ率算出方法およびマッチ率算出プログラム | |
| JP2006072829A (ja) | 画像認識システム及び画像認識方法 | |
| CN115797938A (zh) | 文件图片的自动校正方法、电子设备及存储介质 | |
| JP4869364B2 (ja) | 画像処理装置および画像処理方法 | |
| JP2016110340A (ja) | 画像処理装置、画像処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160310 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170102 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6079449 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |