JP6070314B2 - 接触センサー装置、及び接触情報の検出方法 - Google Patents
接触センサー装置、及び接触情報の検出方法 Download PDFInfo
- Publication number
- JP6070314B2 JP6070314B2 JP2013055672A JP2013055672A JP6070314B2 JP 6070314 B2 JP6070314 B2 JP 6070314B2 JP 2013055672 A JP2013055672 A JP 2013055672A JP 2013055672 A JP2013055672 A JP 2013055672A JP 6070314 B2 JP6070314 B2 JP 6070314B2
- Authority
- JP
- Japan
- Prior art keywords
- contact
- response wave
- tag
- tags
- intensity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
実施例1の接触センサー装置を使用するためには、例えば、以下の手順を行う。(1)所定の構成を有する接触センサー装置を準備する。(2)接触センサーへの様々な接触情報(接触位置と接触強度の組み合わせ)毎に参照応答波ベクトルを取得して、接触と参照応答波ベクトルの対応関係を整理して保存する(参照情報の学習)。(3)実際に使用する。例えば、接触センサーへの接触により生じた応答波ベクトルに、一致あるいは類似する参照応答波ベクトルに対応する接触情報(接触位置と接触強度の組み合わせ)を求める。以下、手順(1)、(2)、及び(3)について説明する。
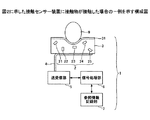
図1は、実施例1による接触センサー装置1の一例を斜め下方からみた構成図である。図2は、図1に示した接触センサー装置を側方からみた構成図である。図3は、図2に示した接触センサー装置に接触物9が接触した場合の一例を示す構成図である。
センサー素子2は、例えばICタグ21から27である。ここで、ICタグ21から27は説明の簡単のために7個だけ図示しているが、その数には上限も下限もない。ICタグ21から27には、無線回路(RF回路)とリードオンリーメモリ(ROM)が含まれる。ICタグ21から27のRF回路は、後述する送受信アンテナ4より質問波を受信して、これに応答して応答波を送信する。リードオンリーメモリ(ROM)には、ICタグ21から27に固有の識別子(以下、IDと称する。)が記録されている。RF回路は、ROMより取得したIDを信号として、応答波に搬送させて送信できる。以上のように、ICタグ21から27は、無線で動作するので無線ICタグとも称する。
<(2)参照情報の学習>
接触センサー装置1の柔軟物3への様々な接触情報(接触位置と接触強度の組み合わせ)毎に参照応答波ベクトルを取得して、接触と参照応答波ベクトルの対応関係を整理して保存することを、参照情報の学習と称する。
<(3)使用>
接触センサー装置1への接触物の接触により生じた検出応答波ベクトルDVから、接触強度と接触位置を求める方法について説明する。
図6は、検出応答波ベクトルから、接触情報を検出する方法の一例を示すフローチャートである。接触の有無にかかわらず、信号処理部6は送受信部5を介して、柔軟物3内に含まれる全てのICタグに対して質問波を送信する(ステップS11)。
実施例1では、接触物9によって接触を受ける接触センサー装置1を説明した。実施例2では、さらに接触物が何であるかを判定して通知する。実施例2の接触センサー装置1の構成は、実施例1の接触センサー装置1の構成と基本的に同一である。以下、接触センサー装置1について、接触センサー装置1との相違点を説明する。
<(4)接触物とIDとの対応テーブル作成と接触物の接触箇所と参照応答波ベクトルの対応付け>
図9を参照して、接触物91が柔軟物3に接触した状態で、送受信部5から質問波が送信されると、各ICタグ21から27だけではなく、接触物91に取り付けられたICタグ911及び912にも質問波が受信される。ICタグ21から27とICタグ911及び912内の各RF回路は各ROMよりIDを取得するとともに、質問波に対する応答波を生成する。ICタグ21から27とICタグ911及び912は、それぞれのIDを信号として、応答波に搬送させて送信する。
<(5)接触物と接触位置を判定>
図13は、接触物とその接触位置を判定する方法の一例を示すフローチャートである。処理が開始されると、ステップS21では、接触が発生したかを判定する。具体的には、図6のステップS11からステップS14までを信号処理部6が実行する。ステップS14で、検出応答波ベクトルが非零値を持つと判断された場合、接触物により接触が発生したとする(YES)。接触物により接触が発生した場合(YES)、ステップS22へ移行する。一方、ステップS14で、検出応答波ベクトルが非零値を持つと判断されない場合、接触物による接触は発生していないとし(NO)、ステップS24に移行する。
実施例1及び実施例2では、センサー素子2である全てのICタグについて、応答波の強度を計測することができた。しかし、送受信アンテナ4で受信可能な範囲に存在するICタグの数が増加した場合、増加したICタグの読出す分だけ余分に時間がかかる。接触センサー装置1における処理の所要時間は、利便性の上で向上させることが望ましい。ここで、接触センサー装置1における処理の所要時間は、例えば、接触情報の取得のための時間を短縮することで達成できる。
実施例3では、センサー素子2であるICタグの一部について、応答波の強度を計測することで、接触情報の取得のための時間を短縮した。
(付記1)
被接触物に埋め込まれた複数の無線ICタグと、
前記被接触物に外部から接触が発生することで位置変化する無線ICタグからの応答波の強度に基づいて、前記接触を推定する信号処理部と、を有することを特徴とする接触センサー装置。
(付記2)
前記複数の無線ICタグとの間で、前記複数の無線ICタグに対応する複数の質問波と、前記複数の質問波に応答して前記複数の無線ICタグから発信された応答波と、を送受信する送受信装置を更に有し、
前記信号処理部は、前記送受信装置に接続されており、前記被接触物に外部から接触が発生することで位置変化した無線ICタグに対応した応答波の強度を、予め取得してある接触情報と前記複数の無線ICタグに対応した応答波の強度の関係と比較することで、前記接触に関する接触情報を推定することを特徴とする付記1に記載の接触センサー装置。
(付記3)
前記被接触物に外部から接触が発生することで位置変化する無線ICタグは、応答波に搬送されるIDを用いて一意に特定可能である付記1又は付記2に記載の接触センサー装置。
(付記4)
前記被接触物に外部から接触が発生して無線ICタグが位置変化する時、前記送受信装置が、位置変化した無線ICタグから受信する応答波の強度が変化する付記1から付記3のいずれかに記載の接触センサー装置。
(付記5)
前記複数の無線ICタグ毎の応答波の強度は、前記複数の無線ICタグのIDと前記複数の無線ICタグ毎の応答波の強度を用いて生成した応答波ベクトルである付記1から付記4のいずれかに記載の接触センサー装置。
(付記6)
前記複数の無線ICタグ毎の応答波の強度の関係は、前記複数の無線ICタグのID前記接触情報と前記複数の無線ICタグ毎の応答波の強度とを関係付ける関連付けテーブルである付記1から付記5のいずれかに記載の接触センサー装置。
(付記7)
前記信号処理部は、前記被接触物に外部から接触が発生することで位置変化する無線ICタグの応答波を取得する際に、前記応答波を発信した無線ICタグのIDを取得可能であり、前記IDと前記IDに対応する無線ICタグの応答波の強度を用いて、検出応答波ベクトルを生成し、
前記予め取得してある接触情報と前記複数の無線ICタグ毎の応答波の強度の関係は、前記予め取得してある接触情報と前記接触情報における前記複数の無線ICタグ毎の応答波の強度を用いて生成された参照応答波ベクトルとの対応関係を示すテーブルであることを特徴とする付記1から付記6のいずれかに記載の接触センサー装置。
(付記8)
前記被接触物が外部から接触される位置に、被接触物の強度を補う接触部が備えられたことを特徴とする付記1から付記7のいずれかに記載の接触センサー装置。
(付記9)
外部からの接触は、無線ICタグが取り付けられた接触物によって発生し、
前記送受信装置は、前記接触物に取り付けられた無線ICタグに対応する質問波と、前記質問波に応答して前記無線ICタグから発信され、前記無線ICタグのIDを含む応答波と、を送受信し、
前記信号処理部は、前記応答波に含まれるIDに基づいて、前記接触物と前記接触物の接触位置を特定可能な付記1から付記8のいずれかに記載の接触センサー装置。
(付記10)
前記無線ICタグのIDを含む応答波の強度に基づいて、前記無線ICタグの前記被接触物への、前記接触物の接触位置を推定することを特徴とする付記9に記載の接触センサー装置。
(付記11)
前記信号処理部は、前記被接触物に外部から接触が発生することで位置変化する無線ICタグの応答波の強度を、予め取得してある接触情報と前記複数の無線ICタグ毎の応答波の強度の関係と比較する際に、前記複数の無線ICタグに応答波の強度の変化が生じたかを順次判定することで、該当する前記接触情報を推定する付記1から付記10のいずれかに記載の接触センサー装置。
(付記12)
前記信号処理部は、発生する確率の高い接触に対応する前記接触情報に優先的に到達するように前記接触情報を推定する付記11に記載の接触センサー装置。
(付記13)
複数の無線ICタグが埋め込まれた被接触物に質問波を送信し、
前記複数の無線ICタグからの応答波を受信し、
接触により位置変化した無線ICタグからの応答波の強度に基づいて、前記接触に関する接触情報を推定する接触情報の検出方法。
2 センサー素子
3 柔軟物
4 送受信アンテナ
5 送受信部
6 信号処理部
7 参照情報記録部
8 電力供給部
21、22、23、24、25、26、27 ICタグ
31 接触部
9、91、92 接触物
911、912、913 ICタグ
Claims (4)
- 被接触物に埋め込まれた複数の無線ICタグと、
前記被接触物に外部から接触が発生することで位置変化した無線ICタグからの応答波の強度に基づいて、前記接触を推定する信号処理部と、を有することを特徴とする接触センサー装置。 - 前記複数の無線ICタグとの間で、前記複数の無線ICタグに対応する複数の質問波と、前記複数の質問波に応答して前記複数の無線ICタグから発信された応答波と、を送受信する送受信装置を更に有し、
前記信号処理部は、前記送受信装置に接続されており、前記位置変化した無線ICタグに対応した応答波の強度を、予め取得してある接触情報と前記複数の無線ICタグに対応した応答波の強度の関係と比較することで、前記接触に関する接触情報を推定することを特徴とする請求項1に記載の接触センサー装置。 - 外部からの接触は、前記複数の無線ICタグとは異なる他の無線ICタグが取り付けられた接触物によって発生し、
前記送受信装置は、前記接触物に取り付けられた前記他の無線ICタグに対応する質問波と、前記質問波に応答して前記他の無線ICタグから発信され、前記他の無線ICタグのIDを含む応答波と、を送受信し、
前記信号処理部は、前記応答波に含まれるIDに基づいて、前記接触物と前記接触物の接触位置を特定可能な請求項2に記載の接触センサー装置。 - 複数の無線ICタグが埋め込まれた被接触物に質問波を送信し、
前記複数の無線ICタグからの応答波を受信し、
接触により位置変化した無線ICタグからの応答波の強度に基づいて、前記接触に関する接触情報を推定する接触情報の検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013055672A JP6070314B2 (ja) | 2013-03-18 | 2013-03-18 | 接触センサー装置、及び接触情報の検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013055672A JP6070314B2 (ja) | 2013-03-18 | 2013-03-18 | 接触センサー装置、及び接触情報の検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014182517A JP2014182517A (ja) | 2014-09-29 |
| JP6070314B2 true JP6070314B2 (ja) | 2017-02-01 |
Family
ID=51701182
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013055672A Active JP6070314B2 (ja) | 2013-03-18 | 2013-03-18 | 接触センサー装置、及び接触情報の検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6070314B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016136565A1 (ja) * | 2015-02-27 | 2016-09-01 | 株式会社村田製作所 | Rfモジュール及びrfシステム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3739927B2 (ja) * | 1998-03-04 | 2006-01-25 | 独立行政法人科学技術振興機構 | 触覚センサと触感検知システム |
| US9071889B2 (en) * | 2010-04-27 | 2015-06-30 | Nec Corporation | Systems and methods for sensor spatial distribution mapping using assigned sensor regions |
-
2013
- 2013-03-18 JP JP2013055672A patent/JP6070314B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014182517A (ja) | 2014-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5778726B2 (ja) | 物品管理システム | |
| US8860551B2 (en) | Automated RFID reader detection | |
| JP5708143B2 (ja) | 情報処理装置、管理方法、及び管理プログラム | |
| JP4868169B2 (ja) | 位置推定システム、位置推定方法および位置推定用プログラム | |
| JP6052388B2 (ja) | センサタグ、センサタグの製造方法 | |
| CN112449737B (zh) | 功率发射器及其操作方法 | |
| JP2007508773A (ja) | 物体の位置を示すための方法および装置 | |
| KR20150132583A (ko) | 송전 장치, 송수전 장치, 수전 장치 검출 방법, 수전 장치 검출 프로그램 및 반도체 장치 | |
| JP2009536307A (ja) | 測定結果を無線送信するために連結器具において使用される装置および乗り物における当該装置の利用 | |
| KR20170066388A (ko) | Rfid 판독 방법 및 rfid 판독기 | |
| US12560674B2 (en) | Enabling determination of proximity of a mobile device based on detectable beacon devices | |
| JP3587448B2 (ja) | 位置検出システム及び位置検出方法 | |
| WO2020035306A1 (en) | Moisture sensors | |
| US9614284B2 (en) | Frequency characteristic adjusting jig, antenna testing apparatus and antenna testing method, and loop antenna | |
| JP6070314B2 (ja) | 接触センサー装置、及び接触情報の検出方法 | |
| JP5950330B2 (ja) | 位置特定装置、位置特定システム、位置特定方法、及びプログラム | |
| WO2007058301A1 (ja) | 検知対象の識別・位置推定システムと、その方法及びプログラム | |
| US7952465B2 (en) | Wireless tag determination system and wireless tag determination method | |
| JP2020008574A (ja) | 車載器、プログラム、及びキーレスエントリシステム | |
| CN101833091A (zh) | 定位装置及系统及其相关的定位方法及误差校正方法 | |
| JP2016061644A (ja) | 位置推定システム | |
| CN101636744A (zh) | 非接触式传输元件以及对其进行表征的方法 | |
| JPWO2015115468A1 (ja) | 無線通信装置 | |
| US20240267876A1 (en) | Communication apparatus, method for controlling same, position management system, and non-transitory computer-readable storage medium | |
| JP2024128762A (ja) | 処理装置、処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160816 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6070314 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |