JP6061663B2 - 電力潮流制御装置 - Google Patents
電力潮流制御装置 Download PDFInfo
- Publication number
- JP6061663B2 JP6061663B2 JP2012276753A JP2012276753A JP6061663B2 JP 6061663 B2 JP6061663 B2 JP 6061663B2 JP 2012276753 A JP2012276753 A JP 2012276753A JP 2012276753 A JP2012276753 A JP 2012276753A JP 6061663 B2 JP6061663 B2 JP 6061663B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- tap
- command
- power
- phase adjuster
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E40/00—Technologies for an efficient electrical power generation, transmission or distribution
- Y02E40/30—Reactive power compensation
Landscapes
- Supply And Distribution Of Alternating Current (AREA)
Description
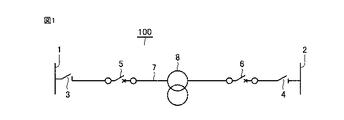
図1〜図4を参照して、第1の実施の形態について説明する。まず、図1を参照して、電力潮流制御装置の一態様である位相調整器(LPC)の構成について説明する。図1は、位相調整器が設置される電力系統100の概略を表わす図である。
図5を参照して、第2の実施の形態について説明する。図5は、第2の実施の形態に係る多頻度制御抑止条件ブロック17を備える位相調整器8の処理ロジック500を表わすブロック図である。
不感帯は、単純な例としては、以下のように設定される。
ΔP=P1−P2
ΔQ=Q1−Q2
Δinow=(Δp+jq)/vnow
ここで、P1は、直前タップ操作前有効電力である。
P2は、直前タップ操作後有効電力である。
Q1は、直前タップ操作前無効電力である。
Q2は、直前タップ操作後無効電力である。
jqは、位相調整器8から供給される無効電力である。
Δinowは、現状値での効果予測値である。
vnowは、操作時の電圧である。
図6を参照して、第3の実施の形態について説明する。図6は、第3の実施の形態に係る処理ロジック600を表わすブロック図である。処理ロジック600は、図3に示される構成に加えて、タイマ18,19を備える。タイマ18,19は、それぞれディレイタイマであり、たとえば、57Lのオフディレイタイマである。
図7を参照して、ハンチングの発生の態様について説明する。図7は、ハンチングが発生する場合における指令または状態の変化を表わすタイミングチャートである。
図8を参照して、ハンチングの防止の態様について説明する。図8は、ハンチングが防止される場合における指令または状態の変化を表わすタイミングチャートである。
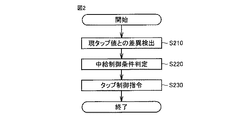
以上のようにして、本実施の形態に係る処理ロジックを備える位相調整器8は、多頻度制御抑止条件の成立を判断するための構成を備えるため、過負荷制御後のタップの多頻度制御を抑止することができる。また、多頻度制御が抑止されるため、タップ動作の回数が制限され、結果として、変圧器の耐用年数の短寿命化が防止され得る。
Claims (3)
- 電力潮流制御装置であって、
変圧器の負荷を調整するためのタップ制御に基づいて、潮流量の変化量を算出するための算出手段と、
前記変化量が予め定められた一定の値を超えるまで、電力系統を制御するための中央制御装置から前記電力潮流制御装置に対して送られるタップ目標値を用いたタップ制御を禁止するための多頻度制御抑止手段とを備える、電力潮流制御装置。 - 電力潮流制御装置であって、
変圧器の負荷を調整するための第1のタップ制御に基づいて、潮流量の変化量を算出するための算出手段と、
前記変化量に基づいて、前記第1のタップ制御の次の第2のタップ制御による潮流量の変化の予測値を設定するための設定手段と、
前記第2のタップ制御による潮流量の変化量が予め定められた一定の値を超えるまで、電力系統を制御するための中央制御装置から前記電力潮流制御装置に対して送られるタップ目標値を用いたタップ制御を禁止するための多頻度制御抑止手段とを備える、電力潮流制御装置。 - 電力潮流制御装置であって、
過負荷の解消の判定を遅延させるタイマと、
前記タイマにより過負荷の解消の判定を遅延させることにより、タップ制御による潮流量の変化が電力系統に現れるまで、前記電力系統を制御するための中央制御装置から前記電力潮流制御装置に対して送られるタップ目標値を用いたタップ制御を禁止するための多頻度制御抑止手段とを備える、電力潮流制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276753A JP6061663B2 (ja) | 2012-12-19 | 2012-12-19 | 電力潮流制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012276753A JP6061663B2 (ja) | 2012-12-19 | 2012-12-19 | 電力潮流制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014121232A JP2014121232A (ja) | 2014-06-30 |
| JP6061663B2 true JP6061663B2 (ja) | 2017-01-18 |
Family
ID=51175611
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012276753A Active JP6061663B2 (ja) | 2012-12-19 | 2012-12-19 | 電力潮流制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6061663B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008050405A1 (fr) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Machine de traitement à décharge de fil |
| WO2008050407A1 (en) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Wire discharge processing apparatus |
| WO2008050406A1 (en) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Wire electric discharge machine |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106329511B (zh) * | 2015-06-16 | 2019-09-27 | 国网智能电网研究院 | 一种直流电网潮流控制器的配置方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53132742A (en) * | 1977-04-22 | 1978-11-18 | Mitsubishi Electric Corp | Method of controlling power system |
| JP2515076B2 (ja) * | 1992-02-28 | 1996-07-10 | 東北電力株式会社 | 電圧無効電力の制御方法及び装置 |
| JP2830640B2 (ja) * | 1992-08-25 | 1998-12-02 | 三菱電機株式会社 | 調整制御装置 |
| JPH06187058A (ja) * | 1992-12-21 | 1994-07-08 | Mitsubishi Electric Corp | 電力設備運用制御方法 |
| JPH06259155A (ja) * | 1993-03-10 | 1994-09-16 | Tohoku Electric Power Co Inc | 自動電圧・無効電力制御装置 |
| JPH0956070A (ja) * | 1995-08-21 | 1997-02-25 | Mitsubishi Electric Corp | 予測制御装置、自動調相制御装置および電圧無効電力制御装置 |
| JPH1155857A (ja) * | 1997-07-29 | 1999-02-26 | Toshiba Corp | 高調波フィルタ |
-
2012
- 2012-12-19 JP JP2012276753A patent/JP6061663B2/ja active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008050405A1 (fr) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Machine de traitement à décharge de fil |
| WO2008050407A1 (en) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Wire discharge processing apparatus |
| WO2008050406A1 (en) * | 2006-10-24 | 2008-05-02 | Mitsubishi Electric Corporation | Wire electric discharge machine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014121232A (ja) | 2014-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2111681B1 (en) | Fuse saving power distribution system fault protection | |
| EP3509179B1 (en) | Fault current limiting control and protection coordination method for converter operating in isolated state in flexible direct current power transmission system | |
| JP6061663B2 (ja) | 電力潮流制御装置 | |
| JP2009131003A (ja) | 電力系統制御装置および電力系統制御方法 | |
| CA2905361C (en) | Controlled switching devices and method of using the same | |
| EP3238310B1 (en) | A method for controlled energising of a transformer | |
| JP2012039818A (ja) | 電圧無効電力制御システム | |
| EP4311057A1 (en) | Systems and methods for self-learning of transformer inrush characteristics to optimize transfer times in static transfer switch | |
| KR101606919B1 (ko) | 전압 조정 기능을 갖는 비동기 투입방지용 차단장치 | |
| JP6981260B2 (ja) | 無効電力補償装置及びその制御回路 | |
| JP2720048B2 (ja) | 配電線保護リレー装置および配電線装置 | |
| RU2335058C1 (ru) | Способ запрета автоматического повторного включения на короткое замыкание на шинах основного источника питания и близкое короткое замыкание в отходящей линии при отказе ее выключателя | |
| JP2020089072A (ja) | 平均電流制御システム | |
| JP6005403B2 (ja) | 系統安定化装置及び系統安定化装置の制御方法 | |
| JP2000078752A (ja) | 電圧・無効電力制御装置 | |
| JP2004343922A (ja) | 配電系統監視制御装置 | |
| JP2017143618A (ja) | 電力変換装置の制御システムおよび制御方法 | |
| JP2010051097A (ja) | 電圧無効電力制御システム | |
| US1681158A (en) | Automatic switching system | |
| Gajic et al. | Using IEC 61850 analogue goose messages for OLTC control of parallel transformers | |
| JP2020005336A (ja) | 系統安定化方法及び系統安定化装置 | |
| JP2011254626A (ja) | 送電線保護装置 | |
| Le et al. | Impacts of voltage sags and protection coordination on sensitive equipment in distribution systems | |
| CN119891163A (zh) | 一种考虑电网解合环操作的辅助决策方法及系统 | |
| KR20170011740A (ko) | 차단기를 제어하는 제어기를 구비한 수배전반 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150708 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6061663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |