JP6050005B2 - プロセス動作を保護するためのモータ保護システムの使用 - Google Patents
プロセス動作を保護するためのモータ保護システムの使用 Download PDFInfo
- Publication number
- JP6050005B2 JP6050005B2 JP2012028992A JP2012028992A JP6050005B2 JP 6050005 B2 JP6050005 B2 JP 6050005B2 JP 2012028992 A JP2012028992 A JP 2012028992A JP 2012028992 A JP2012028992 A JP 2012028992A JP 6050005 B2 JP6050005 B2 JP 6050005B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- prime mover
- lead
- motor driven
- controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000004224 protection Effects 0.000 title claims description 128
- 238000011112 process operation Methods 0.000 title description 26
- 238000000034 method Methods 0.000 claims description 39
- 230000008569 process Effects 0.000 claims description 38
- 238000005259 measurement Methods 0.000 claims description 32
- 230000004044 response Effects 0.000 claims description 18
- 239000012530 fluid Substances 0.000 claims description 13
- 235000014676 Phragmites communis Nutrition 0.000 claims description 7
- 230000003213 activating effect Effects 0.000 claims description 4
- 230000004913 activation Effects 0.000 claims description 4
- MROJXXOCABQVEF-UHFFFAOYSA-N Actarit Chemical compound CC(=O)NC1=CC=C(CC(O)=O)C=C1 MROJXXOCABQVEF-UHFFFAOYSA-N 0.000 claims 27
- 239000010687 lubricating oil Substances 0.000 description 15
- 230000006870 function Effects 0.000 description 13
- 238000012544 monitoring process Methods 0.000 description 10
- 239000000314 lubricant Substances 0.000 description 5
- 239000003921 oil Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000009530 blood pressure measurement Methods 0.000 description 3
- 238000011217 control strategy Methods 0.000 description 3
- 238000005461 lubrication Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/54—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting two or more dynamo-electric motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/54—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting two or more dynamo-electric motors
- H02P1/58—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting two or more dynamo-electric motors sequentially
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/027—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the fault being an over-current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Multiple Motors (AREA)
- Control Of Electric Motors In General (AREA)
Description

105 リードモータ駆動式原動機
110 ラグモータ駆動式原動機
115 ポンプ
120 リードモータ
125 ポンプ
130 ラグモータ
135 オイルコンテナ
140 蒸気潤滑油タンク
145 弁
150 オイルコンテナ
155 弁
160 供給マニホールド
165 中間マニホールド
167 弁
170 弁
173 出口マニホールド
175 弁
177 弁
180 軸受ユニット
183 配管
185 潤滑油タンク
187 弁
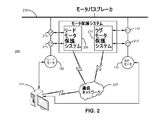
200 システム
205 リードモータ保護システム
210 ラグモータ保護システム
215 電流センサ
220 コントローラ
225 通信ネットワーク
230 グリッドコードイベント通知コンポーネント
Claims (10)
- 少なくとも2つの冗長モータ駆動式原動機(105および110)であって、前記少なくとも2つの冗長モータ駆動式原動機(105および110)の1つがリードモータ駆動式原動機(105)を備え、前記少なくとも2つの冗長モータ駆動式原動機(105および110)の他方が、前記リードモータ駆動式原動機(105)が故障していることに応答して動作するラグモータ駆動式原動機(110)を備える、少なくとも2つの冗長モータ駆動式原動機(105および110)と、
前記少なくとも2つ冗長モータ駆動式原動機(105および110)に結合され、前記少なくとも2つの冗長モータ駆動式原動機(105および110)に関連する電流レベルを含む動作データを測定する複数のセンサ(215)と、
前記複数のセンサ(215)に結合され、前記複数のセンサ(215)によって測定された前記動作データから複数のモータ保護測定値を生成するモータ保護システム(205および210)と、
前記少なくとも2つの冗長モータ駆動式原動機(105および110)および前記モータ保護システムに結合され、前記複数のモータ保護測定値に応じて前記少なくとも2つの冗長モータ駆動式原動機(105および110)の動作を制御するコントローラ(220)であって、前記コントローラ(220)が前記複数のモータ保護測定値を使用して、前記リードモータ駆動式原動機(105)が故障しているかどうかを判定し、前記コントローラ(220)が、前記リードモータ駆動式原動機(105)が故障しているという判定に応答して、前記ラグモータ駆動式原動機(110)の動作をアクティブ化し、前記コントローラ(220)が、前記故障したリードモータ駆動式原動機(105)をトリップする前に前記ラグモータ駆動式原動機(110)の動作をアクティブ化する、コントローラ(220)と
を備え、
前記コントローラ(220)が、前記リードモータ駆動式原動機(105)が動作するプロセスのために定義されたモータ保護曲線を利用し、
前記モータ保護曲線が、前記故障したリードモータ駆動式原動機(105)を複数の過負荷電流レベルで動作させるための対応する安全な実行時を提供し、
前記コントローラ(220)が、測定された前記電流レベルと前記モータ保護曲線を使用して、前記ラグモータ駆動式原動機(110)の動作をアクティブ化するための起動時間を決定し、
前記起動時間が経過する前に新たに測定された電流レベルが予め決められた過負荷電流レベルより低くなった場合は、前記ラグモータ駆動式原動機(110)の動作をアクティブ化は行なわれず、前記リードモータ駆動式原動機(105)の使用が続けられる、
システム(200)。 - 前記コントローラ(220)は、前記ラグモータ駆動式原動機(110)が問題を解決しないときに、プラントオペレータへのプロセス状態通知を生成する、請求項1記載のシステム(200)。
- 前記複数のセンサ(215)によって測定された前記動作データが平均相電流を備える、請求項1又は2に記載のシステム(200)。
- 前記モータ保護システム(205および210)によって生成された前記複数のモータ保護測定値が電流不平衡および電流過負荷を備える、請求項1乃至3のいずれかに記載のシステム(200)。
- 前記コントローラ(220)がタイマを備える、請求項1乃至4のいずれかに記載のシステム(200)。
- 前記リードモータ駆動式原動機(105)が予め決められた過負荷電流値より大きい過負荷電流値を有するという前記モータ保護システム(205および210)の判定に応答して、前記タイマが開始される、請求項5記載のシステム(200)。
- 前記コントローラ(220)が、前記タイマが前記過負荷電流値のために規定されている予め決められた時間限度を超えたことに応答して、前記ラグモータ駆動式原動機(110)の動作をアクティブ化する、請求項6記載のシステム(200)。
- 前記コントローラ(220)が、前記ラグモータ駆動式原動機(110)の前記アクティブ化を開始した前記リードモータ駆動式原動機(105)の前記過負荷電流値を記録し、前記コントローラ(220)が、前記リードモータ駆動式原動機(105)をラインから外すとすぐ、前記記録された過負荷電流を前記ラグモータ駆動式原動機(110)から取得された電流値と比較し、前記コントローラ(220)が、前記少なくとも2つの冗長モータ駆動式原動機(105および110)が動作するプロセス(100)に問題が存在し、前記リードモータ駆動式原動機(105)および前記ラグモータ駆動式原動機(110)の動作が正常であるというプロセス状態通知を生成し、前記コントローラ(220)が、前記ラグモータ駆動式原動機(110)のための前記新たに測定された電流レベルが前記リードモータ駆動式原動機(105)のための前記記録された過負荷電流の予め決められた許容可能レベルの範囲内にあるという判定に応答して、前記プロセス状態通知を生成する、請求項7記載のシステム(200)。
- 前記故障が、不平衡負荷、高すぎる過電流障害、不足電圧状態、過電圧状態、機械的なジャムおよび負荷損失のいずれかである、請求項1乃至8のいずれかに記載のシステム(200)。
- 流体を移動させる原動機システム(105および110)であって、
前記流体を移動させる第1のモータ(120)によって駆動されるリード原動機(105)と、
前記第1のモータ(120)が故障していることに応答して前記流体を移動させる第2のモータ(130)によって駆動されるラグ原動機(110)と、
前記リード原動機(105)の前記第1のモータ(120)および前記ラグ原動機(110)の前記第2のモータ(130)に関連する電流レベルを含む動作データを測定する複数のセンサ(215)と、
前記第1のモータ(120)に関連する前記動作データから複数のモータ保護測定値を生成する第1のモータ保護システム(205)と、
前記第2のモータ(130)に関連する前記動作データから複数のモータ保護測定値を生成する第2のモータ保護システム(210)と、
前記第1のモータ保護システム(205)および前記第2のモータ保護システム(210)によって生成された前記複数のモータ保護測定値に応じて前記リード原動機(105)および前記ラグ原動機(110)の動作を制御するコントローラ(220)とを備え、前記コントローラ(220)が前記複数のモータ保護測定値を使用して、前記リード原動機(105)が故障しているかどうかを判定し、前記コントローラ(220)が、前記リード原動機(105)が故障しているという判定に応答して前記ラグ原動機(110)の動作をアクティブ化し、前記コントローラ(220)が、前記故障したリード原動機(105)をトリップする前に前記ラグ原動機(110)の動作をアクティブ化し、前記コントローラ(220)が、前記リード原動機(105)およびラグ原動機(110)が使用されるプロセス(100)のために定義されたモータ保護曲線を利用して、前記リード原動機の動作をガイドし、前記モータ保護曲線が、前記故障したリード原動機(105)を過負荷電流レベルで動作させるための安全な実行時および前記故障したリード原動機(105)を前記トリップする前に前記ラグ原動機(110)の動作をアクティブ化するための最大バックアップ起動時間を提供し、
前記起動時間が経過する前に新たに測定された電流レベルが予め決められた過負荷電流レベルより低くなった場合は、前記ラグ原動機(110)の動作をアクティブ化は行なわれず、前記リード原動機(105)の使用が続けられる、、
原動機システム(105および110)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/027,837 | 2011-02-15 | ||
| US13/027,837 US8487557B2 (en) | 2011-02-15 | 2011-02-15 | Use of motor protection system to protect process operation |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012170325A JP2012170325A (ja) | 2012-09-06 |
| JP2012170325A5 JP2012170325A5 (ja) | 2015-03-26 |
| JP6050005B2 true JP6050005B2 (ja) | 2016-12-21 |
Family
ID=45581763
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012028992A Active JP6050005B2 (ja) | 2011-02-15 | 2012-02-14 | プロセス動作を保護するためのモータ保護システムの使用 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8487557B2 (ja) |
| EP (1) | EP2490328B1 (ja) |
| JP (1) | JP6050005B2 (ja) |
| CN (1) | CN102646959B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017009907A1 (ja) * | 2015-07-10 | 2017-01-19 | 三菱電機株式会社 | モータ制御装置、圧縮機、及び空気調和機 |
| JP6745661B2 (ja) * | 2015-09-09 | 2020-08-26 | 山洋電気株式会社 | モータ制御装置 |
| US11027719B2 (en) | 2018-12-03 | 2021-06-08 | General Electric Company | Distributed power generation for a vehicle system |
| TWI836294B (zh) * | 2021-11-24 | 2024-03-21 | 台灣松下電器股份有限公司 | 馬達的保護方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3009090A1 (de) * | 1980-03-10 | 1981-09-24 | Hilti AG, 9494 Schaan | Schaltung zur begrenzung des motoranlassstroms |
| JPS59175393A (ja) * | 1983-03-25 | 1984-10-04 | Toshiba Corp | 電動機の保護装置 |
| JPS60190179A (ja) * | 1984-03-12 | 1985-09-27 | Toshiba Corp | 予備機の自動起動制御方法 |
| US5572879A (en) * | 1995-05-25 | 1996-11-12 | Thermo King Corporation | Methods of operating a refrigeration unit in predetermined high and low ambient temperatures |
| DE10024651B4 (de) * | 2000-05-18 | 2011-08-11 | ebm-papst Mulfingen GmbH & Co. KG, 74673 | Verfahren und Schaltungsanordnung zum Starten von elektrischen Motoren |
| NO320841B1 (no) * | 2004-06-08 | 2006-01-30 | Marine Cybernetics As | Fremgangsmate for testing av et kombinert dynamisk posisjonerings- og kraftreguleringssystem |
| CN201169382Y (zh) * | 2008-01-22 | 2008-12-24 | 上海海事大学 | 一种新型水面自航载体 |
| CN101337579A (zh) * | 2008-07-22 | 2009-01-07 | 广州壹鹏电器科技有限公司 | 一种以风能和太阳能为主要动力源的交通运输船 |
| CN101462587B (zh) * | 2009-01-16 | 2011-01-05 | 哈尔滨工程大学 | 冗余控制的微小型水下机器人及故障诊断和容错控制方法 |
| DE202009001759U1 (de) * | 2009-02-12 | 2010-07-22 | Aradex Ag | Antriebssystem |
-
2011
- 2011-02-15 US US13/027,837 patent/US8487557B2/en active Active
-
2012
- 2012-02-10 EP EP12154992.7A patent/EP2490328B1/en active Active
- 2012-02-14 JP JP2012028992A patent/JP6050005B2/ja active Active
- 2012-02-15 CN CN201210041927.0A patent/CN102646959B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN102646959A (zh) | 2012-08-22 |
| EP2490328B1 (en) | 2020-09-23 |
| JP2012170325A (ja) | 2012-09-06 |
| US8487557B2 (en) | 2013-07-16 |
| CN102646959B (zh) | 2016-02-10 |
| US20120207617A1 (en) | 2012-08-16 |
| EP2490328A3 (en) | 2017-11-29 |
| EP2490328A2 (en) | 2012-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Venkataraman et al. | Fundamentals of a motor thermal model and its applications in motor protection | |
| US8981697B2 (en) | Asset condition monitoring in an electric motor | |
| JP6460621B2 (ja) | 稼働中のプロセスユニットにおけるアセットを監視するためのシステムおよび方法 | |
| CN1913274B (zh) | 电力发电机的保护系统及保护方法 | |
| JP6050005B2 (ja) | プロセス動作を保護するためのモータ保護システムの使用 | |
| JP6362270B2 (ja) | 発電制御装置、電力変換器制御装置、発電制御方法およびプログラム | |
| Ransom et al. | Extending motor life with updated thermal model overload protection | |
| CN107527667A (zh) | 一种核电站重要辅机保护系统 | |
| CN110779161A (zh) | 压缩机过载保护的控制方法、装置及空调器 | |
| Gardell et al. | Motor bus transfer applications issues and considerations | |
| CN113107831A (zh) | 给水泵的状态及寿命监测方法、装置、设备及存储介质 | |
| CN109962491A (zh) | 风力发电机组的变流器的故障处理方法和故障处理装置 | |
| JP2013108681A (ja) | 空調システム | |
| Surwase et al. | Fault detection and protection of induction motor using fuzzy logic | |
| Torres et al. | Adjustable speed drives and motor protection | |
| CN117081033A (zh) | 一种快速切换装置参数设计方法、存储介质及处理器 | |
| SE517963C2 (sv) | Nätvärnssystem för skydd av ett totalt elkraftsystems integritet, elkraftsystem innefattande ett nätvärn, systemskyddsförfarande, systemskyddsterminal samt datorprogramprodukt | |
| Banerjee et al. | Motor protection principles | |
| Patel et al. | Protection of motors: examples of setting with and without complete data | |
| Vico et al. | Principles in motor protection | |
| Payne et al. | Keep on Running—Select Motor Relay Settings to Balance Protection and Operation | |
| Wester et al. | Motor protection principles | |
| CN113572153A (zh) | 核电站外电网频率故障处理方法、装置、设备及系统 | |
| RU2722918C1 (ru) | Способ защиты синхронной машины от асинхронного режима (варианты) | |
| AL-Najdi | Voltage dips ride through techniques for synchronous motors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6050005 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |