JP6043544B2 - 入力デバイス、入力システム、電子機器、及び感覚提示方法 - Google Patents
入力デバイス、入力システム、電子機器、及び感覚提示方法 Download PDFInfo
- Publication number
- JP6043544B2 JP6043544B2 JP2012184042A JP2012184042A JP6043544B2 JP 6043544 B2 JP6043544 B2 JP 6043544B2 JP 2012184042 A JP2012184042 A JP 2012184042A JP 2012184042 A JP2012184042 A JP 2012184042A JP 6043544 B2 JP6043544 B2 JP 6043544B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- input
- vibration
- user
- spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
- Percussion Or Vibration Massage (AREA)
Description
上記操作部はユーザによる入力操作を受ける。
上記振動部は上記操作部を振動させる。
上記検出部は上記入力操作を検出する。
上記制御部は、上記検出部で検出された上記入力操作に基づいて上記振動部の振動条件を決定し、決定された上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成されている。
上記入力デバイスは、ユーザによる入力操作を受ける操作部と、上記操作部を振動させる振動部と、を有する。
上記検出装置は上記操作部に対する入力操作を検出する。
上記制御装置は、上記検出部で検出された上記入力操作に基づいて上記振動部の振動条件を決定し、決定した上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成されている。
上記操作部はユーザによる入力操作を受ける。
上記振動部は上記操作部を振動させる。
上記検出部は上記入力操作を検出する。
上記画面は画像を表示する画面を有する。
上記制御部は、上記入力操作に基づいて上記画面に表示された操作対象の移動を制御し、上記画面に表示されたオブジェクトと上記操作対象との間の相対位置に基づいて上記振動条件を決定し、決定した上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成されている。
[全体構成]
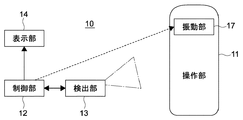
図1は本技術の第1の実施形態に係る入力システム10の概略構成図であり、図2は図1に示した入力システム10の機能ブロック図である。入力システム10は操作部11と制御部12と検出部13と表示部14とを具備する。
操作部11は、ユーザが手hで握りやすいように棒状に形成された筐体と、筐体内に配置された振動部17と、を有する。振動部17は振動可能であり、操作部11は振動部17の振動が筐体を介してユーザの手hに良好に伝達されるように構成されている。
オン状態における振動部17の振動方向は等方的であっても異方的であってもよい。振動部17は、少なくとも一方向に振動可能であればよいが、複数の方向に振動可能であってもよい。複数の方向に振動可能な振動部17は、制御部12によってその振動方向を制御可能な構成を有していてもよい。振動部17としては、モータをはじめとする様々なアクチュエータを用いたものを採用することができる。
検出部13には、操作部11の位置を検出することが可能なCCD(Charge Coupled Device Image Sensor)イメージセンサが用いられている。検出部13に用いることが可能なセンサは、CCDイメージセンサに限らず、例えば、CMOS(Complementary Metal Oxide Semiconductor)イメージセンサでもよい。
制御部12には、一般的なパーソナルコンピュータが用いられる。制御部12は、検出部13から入力された検出結果(操作部11の位置情報)を処理し、表示部14及び操作部11に出力することができればよい。そのため、制御部12には、一般的なパーソナルコンピュータの全ての構成要素が含まれる必要はない。制御部12に搭載されたアンテナ19としては、制御部12による出力信号を操作部11に送信可能な構成を有するものであればよい。
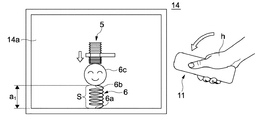
表示部14には、一般的な画面14aを備えたディスプレイが用いられる。表示部14に用いられるディスプレイの方式に制限はない。そのようなディスプレイの方式としては、例えば、液晶、プラズマ、有機EL(Electroluminescence)が挙げられる。
入力システム10では、制御部12が検出部13で検出されたユーザの手hによる操作部11の入力操作に基づいて振動部17をオフ状態からオン状態にするとともに所定の駆動を実行することで、ユーザの手hに弾性感を提示するように構成されている。
また、振動部17がオン状態の場合には、振動部17の振幅Aは、関数(1)及び関数(2)によって制御される。一方、振動部17がオフ状態の場合には、振動部17の振幅Aは、関数(1)及び関数(2)に関わらずゼロである。
オン状態において、制御部12は、振動部17の周波数fを一定としても、適宜変更してもよい。制御部12は、振動部17の周波数fを適宜変更することにより、ばねSの弾性感をよりリアルに表現することが可能である。
[全体構成]
図8は本技術の第2の実施形態に係る入力システム10aの概略構成図であり、図9は図8に示した入力システム10aの機能ブロック図である。本実施形態に係る入力システム10aは、以下に示す構成以外は、第1の実施形態に係る入力システム10と同様に構成されている。入力システム10aの検出部13aは、操作部11a内に配置されている。操作部11a及び表示部14はともに有線で制御部12に接続されている。
操作部11aは、入力デバイスとして構成され、ユーザの手hに握られて入力操作を受けるレバー部11a1と、レバー部11a1がその下端部を支点として移動可能なようにレバー部11a1の下端部を支持する台座部11a2と、を有するジョイスティックである。振動部17はレバー11a1内に配置されており、検出部13aは台座部11a2内に配置されていている。
操作部11aの形状は、第1の実施形態に係る操作部11と同様でもよい。つまり、操作部11aは、棒状に形成された筐体内に振動部17及び検出部13aが配置された構成であってもよい。したがって、検出部13aは操作部11aとともに動作する。したがって、検出部13aの構成としては、自らの動作を検出可能ものが用いられる。このような検出部13aの構成としては、例えば、3軸モーションセンサや6軸モーションセンサを用いた構成が挙げられる。
入力システム10aでは、制御部12が検出部13aで検出されたユーザの手hによる操作部11aの入力操作に基づいて振動部17を駆動することで、ユーザの手hに弾性感を提示するように構成されている。
[全体構成]
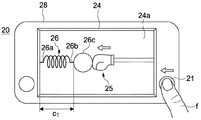
図11は本技術の第3の実施形態に係る電子機器20の機能ブロック図である。本実施形態に係る電子機器20は、以下に示す構成以外は、第1の実施形態に係る入力システム10と同様に構成されている。電子機器20は筐体28を具備する。電子機器20では、第1の実施形態に係る入力システム10とは異なり、操作部21、制御部22、検出部23、表示部24、及び振動部27が全て筐体28と一体に構成されている。
操作部21は、ユーザの指fによって操作される小型のジョイスティックとして構成される。振動部27は操作部21に隣設されている。したがって、振動部27の振動は操作部21を介してユーザの指fに良好に伝達される。
電子機器20では、制御部22が検出部23で検出されたユーザの指fによる操作部21の入力操作に基づいて振動部27を駆動することで、ユーザの指fに弾性感を提示するように構成されている。
[全体構成]
図13は本技術の第4の実施形態に係る入力デバイス30の機能ブロック図である。本実施形態に係る入力デバイス30は、以下に示す構成以外は、第1の実施形態に係る入力システム10と同様に構成されている。入力デバイス30は、第1の実施形態に係る入力システム10とは異なり、画面などのユーザが視認できる構成要素を含まない。また入力デバイス30は筐体31を具備する。入力デバイス30では、制御部32、検出部33、及び振動部37が全て筐体31と一体に構成されている。入力デバイス30では、筐体31自体がユーザの手によって入力操作を受ける操作部を構成する。
筐体31はユーザが手で握りやすいように棒状に形成されている。検出部33は筐体31とともに動作する。検出部33の構成としては、自らの動作を検出可能ものが用いられる。このような検出部33の構成としては、例えば、3軸モーションセンサや6軸モーションセンサを用いた構成が挙げられる。
入力デバイス30では、制御部32が検出部33で検出されたユーザによる筐体31への入力操作に基づいて筐体31の振動部37を駆動することで、ユーザに弾性感を提示するように構成されている。
(1)ユーザによる入力操作を受ける操作部と、
上記操作部を振動させる振動部と、
上記入力操作を検出する検出部と、
上記検出部で検出された上記入力操作に基づいて上記振動部の振動条件を決定し、決定した上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成された制御部と、
を具備する入力デバイス。
(2)上記(1)に記載の入力デバイスであって、
上記制御部は、上記入力操作に基づいて画面に表示された操作対象の移動を制御し、上記画面に表示されたオブジェクトと上記操作対象との間の相対位置に基づいて上記振動条件を決定する
入力デバイス。
(3)上記(2)に記載の入力デバイスであって、
上記オブジェクトは、上記操作対象との相対位置に応じて変形可能な画像である
入力デバイス。
(4)上記(3)に記載の入力デバイスであって、
上記オブジェクトは、弾性変形可能な弾性体を示した画像である。
入力デバイス。
(5)上記(2)から(4)のいずれか1つに記載の入力デバイスであって、
上記制御部は、上記操作対象と上記オブジェクトとの間の距離と、上記操作対象の移動速度と、の少なくとも一方を変数とする関数を用いて、上記振動条件を決定する
入力デバイス。
(6)上記(2)から(5)のいずれか1つに記載の入力デバイスであって、
上記制御部は、予め決定される第1の位置と上記操作対象との距離と、上記操作対象の移動速度と、の少なくとも一方を変数とする関数を用いて、上記振動条件を決定する
入力デバイス。
(7)上記(2)から(6)のいずれか1つに記載の入力デバイスであって、
上記制御部は、上記操作対象が予め決定される第1の位置とは異なる第2の位置から上記第1の位置に近づくにつれて、上記振動部の振幅と周波数との少なくとも一方を大きくする
入力デバイス。
(8)上記(2)から(7)のいずれか1つに記載の入力デバイスであって、
上記制御部は、上記操作対象が予め決定される第1の位置とは異なる第2の位置より上記第1の位置から遠ざかるにつれて、上記振動部の振幅と周波数との少なくとも一方を大きくする
入力デバイス。
(9)上記(2)から(8)のいずれか1つに記載の入力デバイスであって、
上記制御部は、上記操作対象を停止した後、上記振動部の振幅を減衰させる
入力デバイス。
(10)ユーザによる入力操作を受ける操作部と、上記操作部を振動させる振動部と、を有する入力デバイスと、
上記入力操作を検出する検出部と、
上記検出部で検出された上記入力操作に基づいて上記振動部の振動条件を決定し、決定した上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成された制御部と、
を具備する入力システム。
(11)上記(10)に記載の入力システムであって、
上記検出部は、上記入力デバイスと一体に構成されている
入力システム。
(12)ユーザによる入力操作を受ける操作部と、
上記操作部を振動させる振動部と、
上記入力操作を検出する検出部と、
画像を表示する画面を有する表示部と
上記入力操作に基づいて上記画面に表示された操作対象の移動を制御し、上記画面に表示されたオブジェクトと上記操作対象との間の相対位置に基づいて上記振動条件を決定し、決定した上記振動条件で上記振動部を駆動することで、上記ユーザに弾性感を提示するように構成された制御部と、
を具備する電子機器。
(13)ユーザの操作部への入力操作を検出し、
検出した上記入力操作に基づいて上記操作部の振動条件を決定し、
決定した上記振動条件で上記操作部を振動させて、上記ユーザに弾性感を提示する
感覚提示方法。
11…操作部
12…制御部
13…検出部
14…表示部
17…振動部
Claims (11)
- ユーザによる入力操作を受ける操作部と、
前記操作部を振動させる振動部と、
前記入力操作を検出する検出部と、
前記検出部で検出された前記入力操作に基づいて前記振動部の振動条件を決定し、決定した前記振動条件で前記振動部を駆動することで、前記ユーザに弾性感を提示するように構成され、前記入力操作に基づいて画面に表示された操作対象の移動を制御し、前記画面に表示されたオブジェクトが前記操作対象によって変形させられるときに前記振動部の周波数を低下させる制御部と
を具備する入力デバイス。 - 請求項1に記載の入力デバイスであって、
前記制御部は、前記操作対象によって変形させられた前記オブジェクトが元の形状に戻るときに前記振動部の周波数を増加させる
入力デバイス。 - 請求項1又は2に記載の入力デバイスであって、
前記制御部は、前記オブジェクトが前記操作対象によって変形させられるときに前記振動部の振幅を増加させる
入力デバイス。 - 請求項1から3のいずれか1項に記載の入力デバイスであって、
前記制御部は、前記操作対象によって変形させられた前記オブジェクトが元の形状に戻るときに前記振動部の振幅を低下させる
入力デバイス。 - 請求項1から4のいずれか1項に記載の入力デバイスであって、
前記オブジェクトは、弾性変形可能な弾性体を示した画像である
入力デバイス。 - 請求項1から5のいずれか1項に記載の入力デバイスであって、
前記制御部は、前記操作対象と前記オブジェクト内にある所定の位置との間の距離と、前記操作対象の移動速度と、の少なくとも一方を変数とする関数を用いて、前記振動条件を決定する
入力デバイス。 - 請求項1から6のいずれか1項に記載の入力デバイスであって、
前記制御部は、前記操作対象を停止した後、前記振動部の振幅を減衰させる
入力デバイス。 - ユーザによる入力操作を受ける操作部と、前記操作部を振動させる振動部と、を有する入力デバイスと、
前記入力操作を検出する検出部と、
前記検出部で検出された前記入力操作に基づいて前記振動部の振動条件を決定し、決定された前記振動条件で前記振動部を駆動することで、前記ユーザに弾性感を提示するように構成され、前記入力操作に基づいて画面に表示された操作対象の移動を制御し、前記画面に表示されたオブジェクトが前記操作対象によって変形させられるときに前記振動部の周波数を低下させる制御部と
を具備する入力システム。 - 請求項8に記載の入力システムであって、
前記検出部は、前記入力デバイスと一体に構成されている
入力システム。 - ユーザによる入力操作を受ける操作部と、
前記操作部を振動させる振動部と、
前記入力操作を検出する検出部と、
オブジェクトと、前記入力操作に基づいて移動可能な操作対象と、を表示する画面を有する表示部と
前記検出部で検出された前記入力操作に基づいて振動条件を決定し、決定した前記振動条件で前記振動部を駆動することで、前記ユーザに弾性感を提示するように構成され、前記操作対象の移動を制御し、前記オブジェクトが前記操作対象によって変形させられるときに前記振動部の周波数を低下させる制御部と
を具備する電子機器。 - オブジェクトと、ユーザの操作部への入力操作に基づいて移動可能な操作対象と、を画面に表示し、
前記入力操作を検出し、
検出した前記入力操作に基づいて前記操作部の振動条件を決定し、
決定した前記振動条件で前記操作部を振動させて、前記ユーザに弾性感を提示し、
前記オブジェクトが前記操作対象によって変形させられるときに前記操作部の振動の周波数を低下させる
感覚提示方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012184042A JP6043544B2 (ja) | 2012-08-23 | 2012-08-23 | 入力デバイス、入力システム、電子機器、及び感覚提示方法 |
| US13/962,595 US9489041B2 (en) | 2012-08-23 | 2013-08-08 | Input device, input system, electronic apparatus, and sense presentation method |
| CN201310359418.7A CN103631374B (zh) | 2012-08-23 | 2013-08-16 | 输入装置、输入系统、电子装置和感觉呈现方法 |
| CN201810011158.7A CN108170276B (zh) | 2012-08-23 | 2013-08-16 | 输入装置、输入系统、电子装置和感觉呈现方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012184042A JP6043544B2 (ja) | 2012-08-23 | 2012-08-23 | 入力デバイス、入力システム、電子機器、及び感覚提示方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014041520A JP2014041520A (ja) | 2014-03-06 |
| JP2014041520A5 JP2014041520A5 (ja) | 2015-09-24 |
| JP6043544B2 true JP6043544B2 (ja) | 2016-12-14 |
Family
ID=50149056
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012184042A Active JP6043544B2 (ja) | 2012-08-23 | 2012-08-23 | 入力デバイス、入力システム、電子機器、及び感覚提示方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9489041B2 (ja) |
| JP (1) | JP6043544B2 (ja) |
| CN (2) | CN108170276B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015163169A1 (ja) * | 2014-04-23 | 2015-10-29 | ソニー株式会社 | 画像処理装置および方法 |
| CN106774853A (zh) * | 2016-11-28 | 2017-05-31 | 珠海市魅族科技有限公司 | 一种震感反馈方法及终端 |
| JP6842368B2 (ja) * | 2017-05-19 | 2021-03-17 | 任天堂株式会社 | 情報処理プログラム、情報処理システム、情報処理装置、および情報処理方法 |
| US11775071B1 (en) * | 2022-03-08 | 2023-10-03 | Microsoft Technology Licensing, Llc | Haptic feedback from a computing accessory |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3686686B2 (ja) * | 1993-05-11 | 2005-08-24 | 松下電器産業株式会社 | 力覚呈示デバイス、データ入力装置、及びデータ入力デバイス装置 |
| KR100371456B1 (ko) * | 1995-10-09 | 2004-03-30 | 닌텐도가부시키가이샤 | 삼차원화상처리시스템 |
| US6924787B2 (en) * | 2000-04-17 | 2005-08-02 | Immersion Corporation | Interface for controlling a graphical image |
| JP2002082751A (ja) * | 2000-09-08 | 2002-03-22 | Mitsubishi Electric Corp | 仮想空間とのインタラクション装置およびこれを応用した仮想空間システム |
| US7999812B2 (en) * | 2006-08-15 | 2011-08-16 | Nintendo Co, Ltd. | Locality based morphing between less and more deformed models in a computer graphics system |
| JP2008225690A (ja) * | 2007-03-09 | 2008-09-25 | Sony Corp | 振動体、触覚機能付きの入力装置及び電子機器 |
| JP4916390B2 (ja) * | 2007-06-20 | 2012-04-11 | 任天堂株式会社 | 情報処理プログラム、情報処理装置、情報処理システム、および情報処理方法 |
| JP2009009412A (ja) * | 2007-06-28 | 2009-01-15 | Canon Inc | 情報提示装置及び情報提示方法 |
| KR101174450B1 (ko) * | 2007-09-14 | 2012-08-16 | 독립행정법인 산업기술종합연구소 | 버추얼 리얼리티 환경 생성 장치 및 콘트롤러 장치 |
| CA2701963C (en) * | 2007-11-19 | 2014-01-21 | Nokia Corporation | Input device configured to monitor skin movement of a user by mapping and recording deformations of their skin |
| JP2009134473A (ja) * | 2007-11-29 | 2009-06-18 | Sony Corp | 押圧検知センサ、入力装置及び電子機器 |
| EP2352078B1 (en) * | 2008-10-01 | 2022-09-07 | Sony Interactive Entertainment Inc. | Information processing apparatus, information processing method, information recording medium, and program |
| CN103272385B (zh) * | 2008-10-27 | 2016-09-28 | 索尼电脑娱乐公司 | 带有可配置的操作模式的游戏输入装置 |
| CN102422244A (zh) * | 2009-05-07 | 2012-04-18 | 伊梅森公司 | 用于提供触觉反馈形状变化显示器的方法和设备 |
| US8226484B2 (en) * | 2009-08-27 | 2012-07-24 | Nintendo Of America Inc. | Simulated handlebar twist-grip control of a simulated vehicle using a hand-held inertial sensing remote controller |
| JP2011159100A (ja) | 2010-02-01 | 2011-08-18 | Nippon Telegr & Teleph Corp <Ntt> | 逐次類似文書検索装置、逐次類似文書検索方法およびプログラム |
| US20120065784A1 (en) * | 2010-09-13 | 2012-03-15 | Philip Feldman | Providing kinetic feedback for computer-human interaction in virtual or remote operation environments |
| CN102609078B (zh) * | 2011-01-20 | 2014-12-31 | 宏达国际电子股份有限公司 | 具有触觉反馈的电子装置及提供触觉反馈的方法 |
| CN202019421U (zh) * | 2011-04-19 | 2011-10-26 | 康佳集团股份有限公司 | 一种具有振动体感功能的3d电视 |
| KR101945822B1 (ko) * | 2012-03-02 | 2019-02-11 | 삼성전자 주식회사 | 단말기에서 페이지 표시 방법 및 장치 |
-
2012
- 2012-08-23 JP JP2012184042A patent/JP6043544B2/ja active Active
-
2013
- 2013-08-08 US US13/962,595 patent/US9489041B2/en active Active
- 2013-08-16 CN CN201810011158.7A patent/CN108170276B/zh active Active
- 2013-08-16 CN CN201310359418.7A patent/CN103631374B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20140059255A1 (en) | 2014-02-27 |
| CN108170276B (zh) | 2020-12-08 |
| CN103631374B (zh) | 2018-01-30 |
| CN103631374A (zh) | 2014-03-12 |
| JP2014041520A (ja) | 2014-03-06 |
| US9489041B2 (en) | 2016-11-08 |
| CN108170276A (zh) | 2018-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6431126B2 (ja) | モバイルデバイス上での共有されたフィードバックのための双方向性モデル | |
| US9606625B2 (en) | Haptically-enabled deformable device with rigid component | |
| JP6591805B2 (ja) | 静電触覚効果を提供する表面要素のためのシステム及び方法 | |
| JP6478535B2 (ja) | 触覚変換を行うためのシステム及び方法 | |
| JP2019050003A (ja) | 触覚セルのアレイを用いた有形のユーザ・インターフェース・インタラクション及びジェスチャのシミュレーション | |
| EP3171247B1 (en) | Haptically enabled flexible devices | |
| JP6043544B2 (ja) | 入力デバイス、入力システム、電子機器、及び感覚提示方法 | |
| KR20160056834A (ko) | 햅틱 제어기 | |
| JP2020013549A (ja) | 動的システム識別に基づく適応触覚効果レンダリング | |
| EP3489804A1 (en) | Haptic accessory apparatus | |
| JP2021182449A (ja) | 刺激伝達装置 | |
| WO2023189422A1 (ja) | 制御装置、制御方法、触覚提示システム及びプログラム製品 | |
| JPWO2019043787A1 (ja) | 振動制御装置 | |
| WO2023189425A1 (ja) | 制御装置、制御方法、触覚提示システム及びプログラム製品 | |
| JP6809868B2 (ja) | 移動誘導装置、パネル装置、制御装置及び移動誘導方法 | |
| Martínez et al. | The sense of touch as the last frontier in virtual reality technology | |
| JP6600269B2 (ja) | 三次元形状提示システム及び触力覚提示装置 | |
| WO2024053087A1 (ja) | 操作デバイス | |
| WO2023189423A1 (ja) | 制御装置、制御方法、触覚提示システム及びプログラム製品 | |
| JP2023148854A (ja) | 制御装置、制御方法、触覚提示システム及びコンピュータプログラム | |
| JP2024092095A (ja) | 操作入力システム | |
| JP2023148853A (ja) | 制御装置、制御方法、触覚提示システム及びコンピュータプログラム | |
| JP2018041299A (ja) | 触覚呈示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150806 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150806 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160613 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6043544 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |