JP5991806B2 - 航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 - Google Patents
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 Download PDFInfo
- Publication number
- JP5991806B2 JP5991806B2 JP2011246253A JP2011246253A JP5991806B2 JP 5991806 B2 JP5991806 B2 JP 5991806B2 JP 2011246253 A JP2011246253 A JP 2011246253A JP 2011246253 A JP2011246253 A JP 2011246253A JP 5991806 B2 JP5991806 B2 JP 5991806B2
- Authority
- JP
- Japan
- Prior art keywords
- wake
- track
- information
- unit
- local
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000010354 integration Effects 0.000 title claims description 179
- 238000000034 method Methods 0.000 title claims description 67
- 238000004590 computer program Methods 0.000 title claims description 7
- 238000004364 calculation method Methods 0.000 claims description 111
- 239000011159 matrix material Substances 0.000 claims description 21
- 238000012795 verification Methods 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 132
- 230000004927 fusion Effects 0.000 description 74
- 238000012937 correction Methods 0.000 description 61
- 238000001514 detection method Methods 0.000 description 46
- 230000005540 biological transmission Effects 0.000 description 38
- 238000012546 transfer Methods 0.000 description 34
- 238000010586 diagram Methods 0.000 description 25
- 238000000605 extraction Methods 0.000 description 17
- 239000000284 extract Substances 0.000 description 9
- 238000009825 accumulation Methods 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 4
- 238000007499 fusion processing Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000008094 contradictory effect Effects 0.000 description 3
- 238000012217 deletion Methods 0.000 description 3
- 230000037430 deletion Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000013500 data storage Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- UNPLRYRWJLTVAE-UHFFFAOYSA-N Cloperastine hydrochloride Chemical compound Cl.C1=CC(Cl)=CC=C1C(C=1C=CC=CC=1)OCCN1CCCCC1 UNPLRYRWJLTVAE-UHFFFAOYSA-N 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images
















Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
センサネットワークには、複数のセンサが存在する。センサネットワークは、複数の航跡算出装置を有する場合がある。それぞれの航跡算出装置は、いずれかのセンサに接続され、接続されたセンサが観測した情報に基づいて、目標を探知し、追尾し、航跡(ローカル航跡)を算出し、算出した航跡を他の航跡算出装置に対して通知する。航跡算出装置(航跡統合装置)は、自身で算出した航跡と、他の航跡算出装置から通知された航跡とを統合することにより、自身に接続したセンサが観測した情報だけから算出した航跡よりも精度の良い航跡(システム航跡あるいは統合航跡)を算出する。
このようなシステムにおいて、複数の航跡統合装置が、それぞれ異なるシステム航跡を算出する可能性がある。そこで、航跡統合装置が、算出したシステム航跡を他の航跡統合装置に対して通知し、多数決原理に基づいて、採用するシステム航跡を選択することが考えられる。
この発明は、例えば、個別に航跡を統合する複数の航跡統合装置が同一のシステム航跡を算出することを目的とする。
航跡算出部と、航跡間相関部と、対応選択部とを有し、
上記航跡算出部は、センサが観測した情報に基づいて、観測された目標の航跡を算出し、
上記航跡間相関部は、上記航跡算出部が算出した上記航跡と、他のセンサが観測した情報に基づいて他の航跡統合装置が算出した航跡との間の対応関係を推測して、航跡間対応関係とし、
上記対応選択部は、上記航跡間相関部が推測した上記航跡間対応関係と、他の航跡統合装置が推測した航跡間対応関係とのうち、信頼度が高いほうの航跡間対応関係を選択する
ことを特徴とする。
実施の形態1について、図1〜図6を用いて説明する。
なお、同じ要素が複数ある場合、符号の後ろにアルファベットを付して区別する場合がある。
ネットワーク820は、複数のセンサ情報融合装置101の間を接続する。センサ情報融合装置101は、ネットワーク820を介して、他のセンサ情報融合装置101と通信する。
センサ情報融合装置101は、他のセンサ情報融合装置101から受信した航跡と、センサ情報融合装置101自身が算出した航跡との間の対応関係を判定する。センサ情報融合装置101は、対応すると判定した複数の(算出したセンサ情報融合装置101が異なる)航跡をまとめて、統合航跡とする。
センサ情報生成部110は、例えば、センサ111と、信号処理部112と、追尾処理部113とを有する。
センサ111は、観測データ411を取得する。
信号処理部112は、センサ111が取得した観測データ411から、目標信号を表わす探知データ412を抽出する。
追尾処理部113(航跡算出部の一例。)は、信号処理部112からの探知データ412の時系列を解析し、追尾フィルタ処理などにより、ローカル航跡情報を生成する。ローカル航跡情報は、例えば、以下の要素を含む。
・ローカル航跡生成時刻
・目標位置ベクトル及び速度ベクトルのローカル推定値
・目標位置ベクトル及び速度ベクトルのローカル推定誤差共分散行列
「SxTyyy」
ここで、xは、センサ番号である。センサ番号は、分散型センサネットワーク801に接続しているすべてのセンサ111に一意に付与される。yyyは、ローカル航跡番号である。ローカル航跡番号は、例えば、センサ情報融合装置101内において、ローカル航跡が生成された順番、すなわち、目標が探知・追尾された順番に付与される。なお、センサ番号やローカル航跡番号に使用する文字は、アラビア数字に限らず、他の文字や記号などであってもよい。
受信部121は、他のセンサ情報融合装置101からネットワーク820を介して送信された転送航跡情報を受信する。なお、センサ情報融合装置101自身が送信する転送航跡情報425と区別するため、他のセンサ情報融合装置101が送信した転送航跡情報を「他センサ転送航跡情報435」と呼ぶ。
相関処理部122(航跡間相関部の一例。)は、追尾処理部113が生成した自センサローカル航跡情報413と、受信部121が受信した他センサ転送航跡情報435に含まれる他センサローカル航跡情報433との対応関係を照合し、システム航跡情報を生成する。システム航跡情報は、例えば、以下の要素を含む。
・システム航跡生成時刻
・目標位置ベクトル及び速度ベクトルのシステム推定値
・目標位置ベクトル及び速度ベクトルのシステム推定誤差共分散行列
・対応する自センサのローカル航跡ID(存在しない場合もある。)
・センサネットワーク送信回数
「SxTyyy−Sz1Twww1−Sz2Twww2−…−SziTwwwi」
ここで、SxTyyyは、自センサのローカル航跡番号である。すなわち、xは、自センサのセンサ番号であり、yyyは、ローカル航跡番号である。iは、相関処理により、ローカル航跡IDがSxTyyyである航跡と同一の目標についての航跡であると推定された他のセンサ111のローカル航跡の数である。Sz1Twww1からSziTwwwiは、相関処理により、ローカル航跡IDがSxTyyyである航跡と同一の目標についての航跡であると推定される他のセンサ111のローカル航跡IDである。番号z1〜ziは、他のセンサ111のセンサ番号である。なお、他のセンサ111のローカル航跡IDは、センサ番号順に並んでいてもよいし、並んでいなくてもよい。
また、他のセンサ111のローカル航跡に対応する自センサのローカル航跡が存在しない場合、システム航跡IDは、例えば、次の書式にしたがう。
「SxT***−Sz1Twww1−Sz2Twww2−…−SziTwwwi」
ここで、SxT***は、自センサのローカル航跡のなかに、対応するローカル航跡がないことを表わす。
また、分散型センサネットワーク801に接続したセンサ111の総数が既知の場合、システム航跡IDは、固定長であってもよい。例えば、システム航跡IDは、次の書式にしたがう。
「SxTyyy−Sz1Twww1−Sz2Twww2−…−Szn−1Twwwn−1」
ここで、nは、分散型センサネットワーク801に接続したセンサ111の総数である。番号z1からzn−1は、他のセンサ111のセンサ番号である。Sz1Twww1からSzn−1wwwn−1は、相関処理により、ローカル航跡IDがSxTyyyである航跡と同一の目標についての航跡であると推定された他のセンサ111のローカル航跡IDである。なお、センサ番号zkのセンサ111のローカル航跡のなかに、対応するローカル航跡がない場合、ローカル航跡IDの代わりに「SzkT***」を使う。
例えば、システム航跡情報照合部123は、自センサシステム航跡情報422に基づいて、自センサ相関処理結果テーブルを生成する。自センサ相関処理結果テーブルは、行方向にシステム航跡を、列方向にセンサ111を並べたテーブルである。各セルには、そのシステム航跡に含まれるそのセンサ111のローカル航跡IDを配置する。そのセンサ111のローカル航跡のなかに対応するローカル航跡がない場合は、ローカル航跡IDの代わりに「SzT***」を配置する。ただし、zは、その列のセンサ111のセンサ番号である。列方向は、センサ番号順とする。行方向は、センサ番号1のローカル航跡ID順とする。センサ番号1のローカル航跡のなかに対応するローカル航跡がないシステム航跡は、一番最後に配置する。センサ番号1のローカル航跡のなかに対応するローカル航跡がないシステム航跡が複数ある場合、そのなかでは、センサ番号2のローカル航跡ID順とする。
システム航跡情報照合部123は、他センサシステム航跡情報434に基づいて、他センサ相関処理結果テーブルを生成する。他センサ相関処理結果テーブルは、元となるシステム航跡が他センサシステム航跡情報434である点を除き、自センサ相関処理結果テーブルと同様のテーブルである。
システム航跡情報照合部123は、自センサ相関処理結果テーブルと、他のセンサ相関処理結果テーブルとを比較して、異なる行を抽出する。
例えば、自センサ相関処理結果テーブルと他センサ相関処理結果テーブルとが一致している行に対応するシステム航跡については、システム航跡情報修正部124は、自センサシステム航跡情報422を修正せず、そのまま自センサシステム航跡情報424とする。
自センサ相関処理結果テーブルと他センサ相関処理結果テーブルとが異なる行に対応するシステム航跡については、システム航跡情報修正部124は、自センサシステム航跡情報422を採用するか、他センサシステム航跡情報434を採用するかを判断する。システム航跡情報修正部124は、自センサシステム航跡情報422の信頼度と他センサシステム航跡情報434の信頼度とを比較して、信頼度が高いほうのシステム航跡を採用する。システム航跡情報修正部124は、採用したほうのシステム航跡を、自センサシステム航跡情報424とする。
例えば、システム航跡情報修正部124は、自センサシステム航跡情報422に含まれる目標位置ベクトルのシステム推定誤差共分散行列に基づいて、自センサシステム航跡情報422の信頼度を表わす信頼度指数を算出する。システム航跡情報修正部124は、目標位置ベクトルのシステム推定誤差共分散行列の固有値を計算する。システム航跡情報修正部124は、計算した固有値の平均を算出して、自センサシステム航跡情報422の信頼度指数とする。
同様に、システム航跡情報修正部124は、他センサシステム航跡情報434に含まれる目標位置ベクトルのシステム推定誤差共分散行列に基づいて、他センサシステム航跡情報434の信頼度指数を算出する。システム航跡情報修正部124は、目標位置ベクトルのシステム推定誤差共分散行列の固有値を計算する。システム航跡情報修正部124は、計算した固有値の平均を算出して、他センサシステム航跡情報434の信頼度指数とする。
この方式で算出した信頼度指数は、値が小さいほど、信頼度が高いことを意味する。したがって、自センサシステム航跡情報422について算出した信頼度指数が、他センサシステム航跡情報434について算出した信頼度指数より小さい場合、システム航跡情報修正部124は、自センサシステム航跡情報422を採用する。逆に、他センサシステム航跡情報434について算出した信頼度指数が、自センサシステム航跡情報422について算出した信頼度指数より小さい場合、システム航跡情報修正部124は、他センサシステム航跡情報434を採用する。
例えば、システム航跡情報修正部124は、システム航跡生成時刻からの経過時間を信頼度指数として用いる構成であってもよい。その場合、システム航跡生成時刻からの経過時間(すなわち、システム航跡の存続時間)が長いほど信頼度が高い。したがって、自センサシステム航跡情報422について算出した信頼度指数が、他センサシステム航跡情報434について算出した信頼度指数より大きい場合、システム航跡情報修正部124は、自センサシステム航跡情報422を採用する。逆に、他センサシステム航跡情報434について算出した信頼度指数が、自センサシステム航跡情報422について算出した信頼度指数より大きい場合、システム航跡情報修正部124は、他センサシステム航跡情報434を採用する。
あるいは、システム航跡情報修正部124は、システム航跡とセンサ111との間の距離を信頼度指数として用いる構成であってもよい。その場合、システム航跡とセンサ111との間の距離が近いほど信頼度が高い。したがって、目標位置ベクトルのシステム推定誤差共分散行列の固有値の平均を信頼度指数に用いる場合と同様、自センサシステム航跡情報422について算出した信頼度指数が、他センサシステム航跡情報434について算出した信頼度指数より小さい場合、システム航跡情報修正部124は、自センサシステム航跡情報422を採用する。逆に、他センサシステム航跡情報434について算出した信頼度指数が、自センサシステム航跡情報422について算出した信頼度指数より小さい場合、システム航跡情報修正部124は、他センサシステム航跡情報434を採用する。
・システム推定誤差共分散行列の行列式がある閾値以下であれば、送信する。
・システム航跡生成時刻からの経過時間がある閾値以上であれば、送信する。
・システム航跡に対応するローカル航跡の生成時刻からの経過時間がある閾値以上であれば、送信する。
・システム航跡のセンサネットワーク送信回数を、ある自然数の定数Kで割った余りが0であれば、送信する。
送信判断部127は、上述した判断基準のうちのいずれか一つを判断基準としてもよいし、いずれか複数を判断基準としてもよい。複数の判断基準を用いる場合、送信判断部127は、すべての判断基準を満たした場合に、送信すると判断してもよいし、いずれかの判断基準を満たした場合に、送信すると判断してもよい。
送信判断部127は、判断結果に基づいて、転送航跡情報425を生成する。転送航跡情報425は、例えば、以下の要素を含む。
・ローカル航跡生成時刻
・目標位置ベクトル及び速度ベクトルのローカル推定値
・目標位置ベクトル及び速度ベクトルのローカル推定誤差共分散行列
・ローカル航跡に対応するシステム航跡ID
・ローカル航跡に対応するシステム航跡生成時刻
・ローカル航跡に対応する目標位置ベクトル及び速度ベクトルのシステム推定値
・ローカル航跡に対応する目標位置ベクトル及び速度ベクトルのシステム推定誤差共分散行列
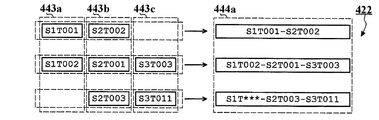
ローカル航跡ID443bは、センサ番号2のセンサ111を有するセンサ情報融合装置101bにおいて、追尾処理部113が生成した3つのローカル航跡のローカル航跡IDである。
ローカル航跡ID443cは、センサ番号3のセンサ111を有するセンサ情報融合装置101cにおいて、追尾処理部113が生成した2つのローカル航跡のローカル航跡IDである。
システム航跡ID444aは、センサ情報融合装置101aの相関処理部122が生成するシステム航跡のシステム航跡IDである。
例えば、相関処理部122は、センサ番号1のローカル航跡「S1T001」と、センサ番号2のローカル航跡「S2T002」とが対応し、センサ番号3のローカル航跡には対応するものがないと判定する。相関処理部122は、ローカル航跡「S1T001」とローカル航跡「S2T002」とを統合したシステム航跡「S1T001−S2T002」を生成する。
また、相関処理部122は、センサ番号1のローカル航跡「S1T002」と、センサ番号2のローカル航跡「S2T001」と、センサ番号3のローカル航跡「S3T003」とが対応すると判定する。相関処理部122は、ローカル航跡「S1T002」とローカル航跡「S2T001」とローカル航跡「S3T003」とを統合したシステム航跡「S1T002−S2T001−S3T003」を生成する。
また、相関処理部122は、センサ番号2のローカル航跡「S2T003」と、センサ番号3のローカル航跡「S3T011」とが対応し、センサ番号1のローカル航跡には対応するものがないと判定する。相関処理部122は、ローカル航跡「S2T003」とローカル航跡「S3T011」とを統合したシステム航跡「S1T***−S2T003−S3T011」を生成する。
例えば、システム航跡情報照合部123は、システム航跡「S2T001−S1T002−S3T002」に基づいて、センサ情報融合装置101bでは、センサ番号1のローカル航跡「S1T002」と、センサ番号2のローカル航跡「S2T001」と、センサ番号3のローカル航跡「S3T002」とが対応すると判定されたことを知得する。
システム航跡情報照合部123は、システム航跡「S2T002−S1T001」に基づいて、センサ情報融合装置101bでは、センサ番号1のローカル航跡「S1T001」と、センサ番号2のローカル航跡「S2T002」とが対応し、センサ番号3のローカル航跡には対応するものがないと判定されたことを知得する。
システム航跡情報照合部123は、システム航跡「S2T003−S3T011」に基づいて、センサ情報融合装置101bでは、センサ番号2のローカル航跡「S2T003」と、センサ番号3のローカル航跡「S3T011」とが対応し、センサ番号1のローカル航跡には対応するものがないと判定されたことを知得する。
システム航跡情報照合部123は、知得した情報に基づいて、他センサ相関処理結果テーブル436を生成する。なお、システム航跡情報照合部123は、自センサ相関処理結果テーブルとの比較を容易にするため、行の順序を並べ替える。
一致していない場合、システム航跡情報照合部123は、自センサシステム航跡情報修正工程S718へ処理を進める。
すべての行が一致している場合、システム航跡情報照合部123は、自センサシステム航跡情報蓄積・表示工程S719へ処理を進める。
システム航跡情報修正部124は、抽出した自センサシステム航跡情報422を、選択したシステム航跡に修正して、自センサシステム航跡情報424を生成する。
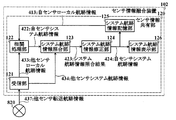
センサ情報融合装置は、センサ情報生成部(110)と、センサ情報共有部(120)とを有する。
前記センサ情報生成部は、センサ(111)と、信号処理部(112)と、追尾処理部(113)とを備える。
前記センサ情報共有部は、受信部(121)と、相関処理部(122)と、システム航跡情報照合部(123)と、システム航跡情報修正部(124)と、システム航跡情報表示部(126)と、システム航跡情報記憶部(125)と、送信判断部(127)と、送信部(128)とを備える。
前記センサは、観測データ(411)を取得する。
前記信号処理部は、前記センサが取得した観測データから目標信号を表わす探知データ(412)を抽出する。
前記追尾処理部は、前記信号処理部が取得した探知データの時系列を解析し、追尾フィルタ処理等によりローカル航跡情報(413)を生成する。
前記受信部は、センサネットワークから他センサからの転送航跡情報(435)を受信する。
前記相関処理部は、前記受信部で受信した他センサからの転送航跡情報に含まれるローカル航跡情報(433)と、前記追尾処理部が生成したローカル航跡情報とを照合することによって、自センサシステム航跡情報(422)を生成する。
前記システム航跡情報照合部は、前記受信部で受信した他センサからの転送航跡情報に含まれるシステム航跡情報(434)と、前記自センサシステム航跡情報とを照合する。
前記システム航跡情報修正部は、前記システム航跡情報照合部における航跡情報照合結果を用いて、結果が不一致であれば、指定した評価規範の下で結果が一致するように自センサシステム航跡情報を修正する。
前記システム航跡情報表示部は、前記システム航跡情報修正部が修正した自センサシステム航跡情報(424)を表示する。
前記システム航跡情報記憶部は、前記システム航跡情報修正部が修正した自センサシステム航跡情報を記憶する。
前記送信判断部は、前記システム航跡情報修正部が修正した自センサシステム航跡情報と、前記追尾処理部が生成したローカル航跡情報とを転送航跡情報(425)として、指定した評価規範の下で送信するかどうか判断する。
前記送信部は、前記送信判断部が送信すべきと判断した前記転送航跡情報をセンサネットワークに送信する。
前記送信判断部(127)は、前記転送航跡情報(425)として前記固有値の平均を含める。
前記送信判断部(127)は、前記転送航跡情報(425)として前記距離を含める。
前記送信判断部(127)は、前記転送航跡情報(425)として前記経過時間を含める。
また、各センサの相関処理結果をシステム航跡IDによって取得し、センサ間の相関処理結果が異なる場合は、各システム航跡の誤差の大きさや存在時間を基に、システム航跡を選択する。これにより、センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで一意的に決定することができ、全センサで同一のシステム航跡情報を得ることができる。
実施の形態2について、図7〜図8を用いて説明する。
なお、実施の形態1と共通する部分については、同一の符号を付し、説明を省略する。
センサ情報融合装置102(受信専用の航跡統合装置の一例。)は、センサ情報融合装置101と異なり、受信専用である。センサ情報融合装置102は、センサ111を有さず、したがって目標999を観測しない。センサ情報融合装置102は、センサ情報融合装置101からの情報に基づいて、システム航跡を生成する。
センサ情報融合装置は、センサ情報共有部(120)を有する。
前記センサ情報共有部は、受信部(121)と、相関処理部(122)と、システム航跡情報照合部(123)と、システム航跡情報修正部(124)と、システム航跡情報表示部(126)と、システム航跡情報記憶部(125)とを備える。
前記受信部は、他センサからの転送航跡情報(435)を受信する。
前記相関処理部は、前記受信部で受信した他センサからの転送航跡情報に含まれるローカル航跡情報(433)と、システム航跡情報記憶部に蓄積した自センサのローカル航跡情報(424)とを照合することによって、自センサシステム航跡情報(422)を生成する。
前記システム航跡情報照合部は、前記受信部で受信した他センサからの転送航跡情報に含まれるシステム航跡情報(434)と、前記自センサシステム航跡情報とを照合する。
前記システム航跡情報修正部は、前記システム航跡情報照合部における自センサ及び他センサのシステム航跡情報照合結果を用いて、結果が不一致であれば、指定した評価規範の下で結果が一致するように自センサシステム航跡情報を修正する。
前記システム航跡情報表示部は、前記システム航跡情報修正部が修正した自センサシステム航跡情報(424)を表示する。
前記システム航跡情報記憶部は、前記システム航跡情報修正部が修正した自センサシステム航跡情報を記憶する。
実施の形態3について、図9〜図19を用いて説明する。
なお、実施の形態1または実施の形態2と共通する部分については、同一の符号を付し、説明を省略する。
センサ111は、いずれかの航跡統合装置103に接続している。センサ111は、例えば、ドップラーレーダやその他のレーダ、赤外線カメラやその他のカメラなどである。センサ111は、所定の範囲内に存在する目標999を観測する。センサ111は、観測した結果を表わす信号を、接続した航跡統合装置103に対して出力する。
複数の航跡統合装置103は、ネットワーク820を介して、互いに接続している。航跡統合装置103は、接続したセンサ111が出力した信号に基づいて、センサ111が観測した目標999の航跡を算出する。航跡統合装置103は、算出した航跡を他の航跡統合装置103に対して通知する。航跡統合装置103は、他の航跡統合装置103が通知した航跡を取得する。航跡統合装置103は、自ら算出した航跡と、他の航跡統合装置103から取得した航跡とに基づいて、統合航跡を算出する。
なお、1つの航跡統合装置103に複数のセンサ111が接続している構成であってもよいし、センサ111が接続していない航跡統合装置103が存在する構成であってもよい。
処理装置911は、記憶装置914が記憶したコンピュータプログラムを実行することにより、データを処理し、航跡統合装置103全体を制御する。
記憶装置914は、処理装置911が実行するコンピュータプログラムや、処理装置911が処理するデータなどを記憶する。記憶装置914は、例えば、揮発性メモリや不揮発性メモリなどの半導体メモリ、磁気ディスクや光学ディスクなどの記録媒体にデータを記録し、記録したデータを読み出す記録媒体駆動装置などである。
入力装置912は、航跡統合装置103の外部から情報を入力し、処理装置911が処理できるデータに変換する。入力装置912が変換したデータは、処理装置911が直接処理してもよいし、記憶装置914が一時的に記憶してもよい。入力装置912は、例えば、キーボードやマウスなど使用者による操作を入力する操作入力装置、マイクなど音声を入力する音声入力装置、カメラやスキャナなど画像を入力する画像入力装置、アナログ信号をデジタルデータに変換するアナログデジタル変換装置、他の装置が送信した信号を受信して復調する受信装置などである。
出力装置913は、処理装置911が処理したデータや、記憶装置914が記憶したデータを変換して、航跡統合装置103の外部に出力する。出力装置913は、例えば、液晶表示装置など文字や画像を表示する表示装置、プリンタなど文字や画像を印刷する印刷装置、スピーカなど音声を出力する音声出力装置、デジタルデータをアナログ信号に変換するデジタルアナログ変換装置、変調信号を生成して他の装置に対して送信する送信装置などである。
航跡記憶部134は、記憶装置914を用いて、航跡算出部133が生成した航跡データを記憶する。
航跡通知部135は、定期的に、航跡記憶部134が記憶した航跡データをすべて通知する構成であってもよい。あるいは、航跡通知部135は、航跡算出部133が新たな航跡を生成しあるいは既存の航跡を更新した場合に、生成あるいは更新された航跡についての航跡データを通知する構成であってもよい。
また、航跡通知部135は、信頼度が低い航跡についての航跡データを通知しない構成であってもよい。例えば、航跡通知部135は、処理装置911を用いて、航跡記憶部134が記憶した航跡データに基づいて、その航跡データが表わす航跡の信頼度を算出する。航跡通知部135は、処理装置911を用いて、算出した信頼度を所定の信頼度と比較する。算出した信頼度のほうが低い場合、航跡通知部135は、その航跡データを通知しない。
なお、信頼度は、例えば、航跡算出部133が用いる追尾フィルタの誤差分散共分散行列や、航跡が更新された回数、航跡が最後に更新された時刻からの経過時間などに基づいて算出する。例えば、追尾フィルタの誤差分散が小さいほど、航跡の信頼度は高くなる。また、航跡が更新された回数が多いほど、航跡の信頼度は高くなる。また、航跡が最後に更新された時刻からの経過時間が長いほど、航跡の信頼度は低くなる。
なお、統合航跡算出部142は、航跡取得部141が記憶した航跡データのうち、航跡通知部135が他のセンサ情報融合装置101に対して通知した航跡データだけを使う構成であってもよい。そうすれば、複数のセンサ情報融合装置101において、統合航跡算出部142が推測する対応関係が食い違うのを防ぐことができる。
統合航跡算出部142は、処理装置911を用いて、推測した対応関係に基づいて、統合航跡を算出する。統合航跡は、異なる航跡統合装置103が算出した1以上の航跡を統合した航跡である。複数の航跡データが対応していると判定した場合、統合航跡算出部142は、その複数の航跡データが表わす航跡を統合して統合航跡を算出する。また、他に対応する航跡データがないと判定した航跡データについては、統合航跡算出部142は、その航跡データが表わす航跡を、そのまま統合航跡とする。
統合航跡算出部142は、処理装置911を用いて、算出した統合航跡を表わす統合航跡データを生成する。
統合航跡記憶部145は、記憶装置914を用いて、統合航跡選択部144が選択した統合航跡を表わす統合航跡データを記憶する。
統合航跡通知部148は、定期的に、統合航跡記憶部145が記憶した統合航跡データをすべて通知する構成であってもよい。あるいは、統合航跡通知部148は、統合航跡選択部144が新たな統合航跡を選択した場合に、選択された統合航跡についての統合航跡データを通知する構成であってもよい。あるいは、統合航跡通知部148は、統合航跡選択部144が新たに選択した統合航跡が、統合航跡取得部143が取得した統合航跡データが表わす統合航跡と異なる場合に、統合航跡データを通知する構成であってもよい。
また、統合航跡通知部148は、信頼度が低い統合航跡についての統合航跡データを通知しない構成であってもよい。例えば、統合航跡通知部148は、処理装置911を用いて、統合航跡記憶部145が記憶した統合航跡データに基づいて、その統合航跡データが表わす統合航跡の信頼度を算出する。統合航跡通知部148は、処理装置911を用いて、算出した信頼度を所定の信頼度と比較する。算出した信頼度のほうが低い場合、航跡通知部135は、その統合航跡データを通知しない。なお、統合航跡データを通知するか否かを判定するために統合航跡通知部148が算出する信頼度は、どの統合航跡を選択するかを判定するために統合航跡選択部144が用いる信頼度と同じ算出方式で算出するものであってもよいし、異なる算出方式で算出するものであってもよい。
探知時刻451は、探知された目標999をセンサ111が観測した時刻を表わす。
探知位置452は、探知された目標999の位置を表わす。例えば、探知位置452は、三次元あるいは二次元のベクトルである。探知位置452は、直交座標系あるいは極座標系における座標を表わす。座標系の原点は、センサ111あるいは所定の基準点である。
探知強度453は、センサ111が目標999を観測した信号の強度を表わす。
探知データ450は、このほか、例えば、探知された目標999の速度を表わす探知速度、探知された目標999の位置に関するセンサ111の分解能を表わす位置分解能などを含む構成であってもよい。
航跡識別子461は、航跡統合装置103のなかで航跡データ460を一意に識別するためのデータである。航跡算出部133は、例えば、それまでに生成した航跡の数を数えておき、新たな航跡を生成する場合、それまでに生成した航跡の数を、その航跡の航跡識別子461にする。
更新時刻462は、航跡算出部133がその航跡を生成あるいは更新するために使った探知データ450のうち、探知時刻451が最も新しい探知データ450の探知時刻451である。
推定位置463は、更新時刻462における目標999の位置の推定値を表わす。例えば、推定位置463は、三次元あるいは二次元のベクトルである。
推定速度464は、更新時刻462における目標999の速度の推定値を表わす。例えば、推定速度464は、三次元あるいは二次元のベクトルである。
信頼度465は、その航跡の信頼度を表わす。信頼度465は、例えば、推定位置463や推定速度464に見込まれる誤差の推定値である。この場合、信頼度465の数値が小さいほど、その航跡の信頼度が高いことを意味する。
統合装置識別子471は、航跡統合システム803のなかで、その航跡データ460を生成した航跡統合装置103を一意に識別するためのデータである。航跡データ460に含まれる航跡識別子461と、統合装置識別子471とを組み合わせることで、航跡統合システム803のなかで航跡通知データ470を一意に識別することができる。統合装置識別子471と航跡識別子461とを合わせたものを、局所航跡識別子472と呼ぶ。
なお、航跡通知データ470は、複数の航跡データ460を含む構成であってもよい。
航跡取得部141は、他の航跡統合装置103の航跡通知部135から通知された航跡通知データ470を取得することにより、そのなかに含まれる航跡データ460を取得する。航跡取得部141は、取得した航跡通知データ470を記憶する。なお、1つの航跡通知データ470のなかに複数の航跡データ460が含まれる場合、航跡取得部141は、航跡通知データ470を航跡データ460ごとに分け、複数の航跡通知データ470にして記憶する。記憶した航跡通知データ470のなかに、取得した航跡通知データ470と局所航跡識別子472が同じ航跡通知データ470がある場合、航跡取得部141は、その航跡通知データ470を削除し、取得した航跡通知データ470で置き換える。なお、航跡取得部141は、局所航跡識別子472が同じ航跡通知データ470の更新時刻462を比較して、古いほうを削除する構成であってもよい。
統合航跡識別子481は、航跡統合装置103のなかで統合航跡データ480を一意に識別するデータである。
更新時刻482は、その統合航跡に統合された航跡データのうち、最も更新時刻462が新しい航跡データの更新時刻462である。
推定位置483は、更新時刻482における目標999の位置の推定値を表わす。
推定速度484は、更新時刻482における目標999の速度の推定値を表わす。
信頼度485は、その統合航跡の信頼度を表わす。
航跡間対応関係486は、その統合航跡に統合された航跡データを表わす。航跡間対応関係486は、例えば、1以上の局所航跡識別子472を含む。局所航跡識別子472は、その統合航跡に統合された航跡データの局所航跡識別子である。
なお、実施の形態1で説明したシステム航跡IDのように、その統合航跡に統合された航跡データの局所航跡識別子を含むデータを統合航跡識別子481とする場合、統合航跡データ480は、航跡間対応関係486を含まなくてもよい。
航跡統合処理S703は、例えば、航跡算出工程S730と、統合航跡算出処理S740と、統合航跡選択処理S750とを有する。
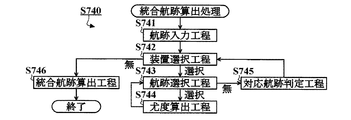
統合航跡算出処理S740は、航跡算出工程S730で航跡を更新した場合や新たな航跡を生成した場合や、他の航跡統合装置103から航跡取得部141が航跡を取得した場合に実行される。統合航跡算出処理S740において、航跡統合装置103は、航跡算出工程S730で更新し又は生成した航跡や、他の航跡統合装置103から通知された航跡に対して、その航跡を含む統合航跡を算出する。
統合航跡選択処理S750は、統合航跡算出処理S740で統合航跡を算出した場合や、他の航跡統合装置103から統合航跡取得部143が統合航跡を取得した場合に実行される。統合航跡選択処理S750において、航跡統合装置103は、統合航跡算出処理S740で算出した統合航跡や、他の航跡統合装置103から通知された統合航跡と、その統合航跡と矛盾する他の統合航跡とから、採用する統合航跡を選択する。航跡統合装置103は、選択した統合航跡を他の航跡統合装置103に対して通知する。
探知抽出工程S732において、観測取得部132は、観測取得工程S731で入力した信号を処理して、探知データ450を生成する。
探知相関工程S733において、航跡算出部133は、探知抽出工程S732で観測取得部132が生成した探知データ450と、航跡記憶部134が記憶した航跡データ460とに基づいて、どの航跡データ460が表わす航跡に、探知データ450が表わす目標999が属するかを判定する。
航跡更新工程S734において、航跡算出部133は、探知データ450が表わす目標999が属すると探知相関工程S733で判定した航跡を更新し、あるいは、どの航跡にも属さないと判定した目標999が属する新たな航跡を生成する。航跡記憶部134は、航跡算出部133が更新し又は生成した航跡を表わす航跡データ460を記憶する。
通知判定工程S735において、航跡通知部135は、航跡記憶部134が記憶した航跡データ460を他の航跡統合装置103に対して通知するか否かを判定する。通知しないと判定した場合、航跡通知部135は、航跡算出工程S730を終了する。通知すると判定した場合、航跡通知部135は、航跡通知工程S736へ処理を進める。
航跡通知工程S736において、航跡通知部135は、通知すると通知判定工程S735で判定した航跡データ460を含む航跡通知データ470を生成する。航跡通知部135は、生成した航跡通知データ470を他の航跡統合装置103に対して通知する。
選択すべき航跡統合装置103が存在しない場合、統合航跡算出部142は、統合航跡算出工程S746へ処理を進める。
選択すべき航跡統合装置103が存在する場合、統合航跡算出部142は、そのなかから、航跡統合装置103を一つ選択し、航跡選択工程S743へ処理を進める。
選択すべき航跡データ460が存在しない場合、統合航跡算出部142は、対応航跡判定工程S745へ処理を進める。
選択すべき航跡データ460が存在する場合、統合航跡算出部142は、そのなかから、航跡データ460を一つ選択し、尤度算出工程S744へ処理を進める。
統合航跡算出部142は、航跡選択工程S743に処理を戻し、次の航跡データ460を選択する。
なお、尤度算出工程S744で記憶した尤度が存在しない場合、すなわち、航跡選択工程S743で選択した航跡データ460について算出した尤度がすべて所定の尤度より小さい場合は、統合航跡算出部142は、装置選択工程S742で選択した航跡統合装置103について、航跡入力工程S741で入力した航跡データ460に対応する航跡データ460が存在しないと判定する。
統合航跡算出部142は、装置選択工程S742に処理を戻し、次の航跡統合装置103を選択する。
統合航跡入力工程S751で入力した統合航跡データ480と矛盾する統合航跡データ480が存在しない場合、統合航跡選択部144は、統合航跡記憶工程S757へ処理を進める。
統合航跡入力工程S751で入力した統合航跡データ480と矛盾する統合航跡データ480が存在する場合、統合航跡選択部144は、信頼度算出工程S753へ処理を進める。
統合航跡入力工程S751で入力した統合航跡データ480が表わす統合航跡の信頼度が最も高いと判定した場合、統合航跡選択部144は、抽出修正工程S756へ処理を進める。
矛盾抽出工程S752で抽出したいずれかの統合航跡の信頼度が最も高いと判定した場合、統合航跡選択部144は、入力修正工程S755へ処理を進める。
局所航跡識別子472を削除した結果、航跡間対応関係486に含まれる局所航跡識別子472が存在しなくなった場合、その統合航跡は消滅する。統合航跡選択部144は、統合航跡選択処理S750を終了する。
局所航跡識別子472を削除しても、航跡間対応関係486に含まれる局所航跡識別子472が存在する場合、統合航跡選択部144は、矛盾抽出工程S752に処理を戻し、修正した統合航跡データ480と矛盾する統合航跡データ480を抽出する。
統合航跡記憶部145は、修正した統合航跡データ480を記憶する。なお、局所航跡識別子472を削除したことにより、航跡間対応関係486に含まれる局所航跡識別子472が存在しなくなった統合航跡データ480がある場合、統合航跡記憶部145は、その統合航跡データ480を削除する。
上記航跡算出部は、センサ(111)が観測した情報に基づいて、観測された目標の航跡(自センサローカル航跡情報413)を算出する。
上記航跡間相関部は、上記航跡算出部が算出した上記航跡と、他のセンサが観測した情報に基づいて他の航跡統合装置が算出した航跡(他センサローカル航跡情報433)との間の対応関係を推測して、航跡間対応関係(統合航跡;自センサシステム航跡情報422)とする。
上記対応選択部は、上記航跡間相関部が推測した上記航跡間対応関係と、他の航跡統合装置が推測した航跡間対応関係とのうち、信頼度が高いほうの航跡間対応関係を選択する。
上記対応通知部は、上記航跡間相関部(142;122)が推測した上記航跡間対応関係を上記対応選択部(144;124)が選択した場合に、上記対応選択部が選択した上記航跡間対応関係を他の航跡統合装置に対して通知する。
上記対応通知部は、上記航跡間相関部(142;122)が推測した上記航跡間対応関係を上記対応選択部(144;124)が選択し、かつ、上記対応選択部が選択した上記航跡間対応関係の信頼度が所定の信頼度より高い場合に、上記対応選択部が選択した上記航跡間対応関係を他の航跡統合装置に対して通知する。
上記複数のセンサは、それぞれ、上記複数の航跡統合装置のいずれかに接続し、観測した情報を、接続した上記航跡統合装置に対して通知する。
上記受信専用の航跡統合装置は、航跡間相関部(142;122)と、対応選択部(144;124)とを有する。
上記受信専用の航跡統合装置の上記航跡間相関部は、上記複数の航跡統合装置(103;101)が算出した航跡の間の対応関係を推測して、航跡間対応関係とする。
上記受信専用の航跡統合装置の上記対応選択部は、上記航跡間相関部が推測した上記航跡間対応関係と、上記複数の航跡統合装置それぞれが推測した複数の航跡間対応関係とのうち、信頼度が最も高い航跡間対応関係を選択する。
Claims (11)
- 航跡算出部と、航跡間相関部と、対応選択部とを有し、
上記航跡算出部は、センサが取得した観測データに基づいて、観測された目標の航跡を示すローカル航跡情報を生成し、
上記航跡間相関部は、上記航跡算出部が生成したローカル航跡情報と、他のセンサが取得した上記目標の観測データに基づいて他の航跡統合装置が生成したローカル航跡情報との間の対応関係を推測して、対応関係があると推測されるローカル航跡情報を統合した情報であり、上記目標の位置ベクトルの誤差共分散行列を含む情報であるシステム航跡情報を生成し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報に含まれる誤差共分散行列について固有値の平均を算出し、上記他の航跡統合装置が生成したシステム航跡情報に含まれる誤差共分散行列について固有値の平均を算出し、算出された平均が小さいほうのシステム航跡情報を選択する航跡統合装置であって、
上記ローカル航跡情報は、上記ローカル航跡情報を識別するローカル航跡識別子を含み、
上記システム航跡情報は、統合されたローカル航跡情報のローカル航跡識別子を結合した識別子を、上記システム航跡情報を識別するシステム航跡識別子として含み、
上記航跡統合装置は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致するか判定するシステム航跡情報照合部を有し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致しないと判定された場合に、システム航跡情報の選択を行う
ことを特徴とする航跡統合装置。 - 上記航跡統合装置は、更に、対応通知部を有し、
上記対応通知部は、上記航跡間相関部が生成したシステム航跡情報を上記対応選択部が選択した場合に、上記対応選択部が選択したシステム航跡情報を上記他の航跡統合装置に対して通知する
ことを特徴とする請求項1に記載の航跡統合装置。 - 上記航跡統合装置は、更に、対応通知部を有し、
上記対応通知部は、上記航跡間相関部が生成したシステム航跡情報を上記対応選択部が選択し、かつ、上記対応選択部が選択したシステム航跡情報に含まれる誤差共分散行列についての固有値の平均が所定の値より小さい場合に、上記対応選択部が選択したシステム航跡情報を上記他の航跡統合装置に対して通知する
ことを特徴とする請求項1に記載の航跡統合装置。 - 航跡算出部と、航跡間相関部と、対応選択部とを有し、
上記航跡算出部は、センサが取得した観測データに基づいて、観測された目標の航跡を示すローカル航跡情報を生成し、
上記航跡間相関部は、上記航跡算出部が生成したローカル航跡情報と、他のセンサが取得した上記目標の観測データに基づいて他の航跡統合装置が生成したローカル航跡情報との間の対応関係を推測して、対応関係があると推測されるローカル航跡情報を統合したシステム航跡情報を生成し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報と、上記他の航跡統合装置が生成したシステム航跡情報とのうち、生成された時刻からの経過時間が長いほうのシステム航跡情報を選択する航跡統合装置であって、
上記ローカル航跡情報は、上記ローカル航跡情報を識別するローカル航跡識別子を含み、
上記システム航跡情報は、統合されたローカル航跡情報のローカル航跡識別子を結合した識別子を、上記システム航跡情報を識別するシステム航跡識別子として含み、
上記航跡統合装置は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致するか判定するシステム航跡情報照合部を有し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致しないと判定された場合に、システム航跡情報の選択を行う
ことを特徴とする航跡統合装置。 - 上記航跡統合装置は、更に、対応通知部を有し、
上記対応通知部は、上記航跡間相関部が生成したシステム航跡情報を上記対応選択部が選択した場合に、上記対応選択部が選択したシステム航跡情報を上記他の航跡統合装置に対して通知する
ことを特徴とする請求項4に記載の航跡統合装置。 - 上記航跡統合装置は、更に、対応通知部を有し、
上記対応通知部は、上記航跡間相関部が生成したシステム航跡情報を上記対応選択部が選択し、かつ、上記対応選択部が選択したシステム航跡情報が生成された時刻からの経過時間が所定の時間より長い場合に、上記対応選択部が選択したシステム航跡情報を上記他の航跡統合装置に対して通知する
ことを特徴とする請求項4に記載の航跡統合装置。 - 複数の航跡統合装置と、複数のセンサとを有し、
上記複数の航跡統合装置は、それぞれ、請求項1から請求項6のいずれか1項に記載の航跡統合装置であり、
上記複数のセンサは、それぞれ、上記複数の航跡統合装置のいずれかに接続し、取得した観測データを、接続した上記航跡統合装置に対して通知する
ことを特徴とする航跡統合システム。 - 上記航跡統合システムは、更に、受信専用の航跡統合装置を有し、
上記受信専用の航跡統合装置は、航跡間相関部と、対応選択部とを有し、
上記受信専用の航跡統合装置の上記航跡間相関部は、上記複数の航跡統合装置が生成したローカル航跡情報の間の対応関係を推測して、対応関係があると推測されるローカル航跡情報を統合したシステム航跡情報を生成し、
上記受信専用の航跡統合装置の上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報と、上記複数の航跡統合装置それぞれが生成したシステム航跡情報とのうち、いずれかのシステム航跡情報を選択する
ことを特徴とする請求項7に記載の航跡統合システム。 - コンピュータが実行することにより上記コンピュータを請求項1から請求項6のいずれか1項に記載の航跡統合装置として機能させることを特徴とするコンピュータプログラム。
- 航跡算出部と、航跡間相関部と、対応選択部とを有する航跡統合装置が、航跡を統合する航跡統合方法において、
上記航跡算出部は、センサが取得した観測データに基づいて、観測された目標の航跡を示すローカル航跡情報を生成し、
上記航跡間相関部は、上記航跡算出部が生成した上記ローカル航跡情報と、他のセンサが取得した上記目標の観測データに基づいて他の航跡統合装置が生成したローカル航跡情報との間の対応関係を推測して、対応関係があると推測されるローカル航跡情報を統合した情報であり、上記目標の位置ベクトルの誤差共分散行列を含む情報であるシステム航跡情報を生成し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報に含まれる誤差共分散行列について固有値の平均を算出し、上記他の航跡統合装置が生成したシステム航跡情報に含まれる誤差共分散行列について固有値の平均を算出し、算出された平均が小さいほうのシステム航跡情報を選択する航跡統合方法であって、
上記ローカル航跡情報は、上記ローカル航跡情報を識別するローカル航跡識別子を含み、
上記システム航跡情報は、統合されたローカル航跡情報のローカル航跡識別子を結合した識別子を、上記システム航跡情報を識別するシステム航跡識別子として含み、
上記航跡統合装置は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致するか判定するシステム航跡情報照合部を有し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致しないと判定された場合に、システム航跡情報の選択を行う
ことを特徴とする航跡統合方法。 - 航跡算出部と、航跡間相関部と、対応選択部とを有する航跡統合装置が、航跡を統合する航跡統合方法において、
上記航跡算出部は、センサが取得した観測データに基づいて、観測された目標の航跡を示すローカル航跡情報を生成し、
上記航跡間相関部は、上記航跡算出部が生成したローカル航跡情報と、他のセンサが取得した上記目標の観測データに基づいて他の航跡統合装置が生成したローカル航跡情報との間の対応関係を推測して、対応関係があると推測されるローカル航跡情報を統合したシステム航跡情報を生成し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報と、上記他の航跡統合装置が生成したシステム航跡情報とのうち、生成された時刻からの経過時間が長いほうのシステム航跡情報を選択する航跡統合方法であって、
上記ローカル航跡情報は、上記ローカル航跡情報を識別するローカル航跡識別子を含み、
上記システム航跡情報は、統合されたローカル航跡情報のローカル航跡識別子を結合した識別子を、上記システム航跡情報を識別するシステム航跡識別子として含み、
上記航跡統合装置は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致するか判定するシステム航跡情報照合部を有し、
上記対応選択部は、上記航跡間相関部が生成したシステム航跡情報のシステム航跡識別子に含まれるローカル航跡識別子と、他の航跡統合装置が生成したシステム航跡情報に含まれるローカル航跡識別子とが一致しないと判定された場合に、システム航跡情報の選択を行う
ことを特徴とする航跡統合方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011246253A JP5991806B2 (ja) | 2011-11-10 | 2011-11-10 | 航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011246253A JP5991806B2 (ja) | 2011-11-10 | 2011-11-10 | 航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013104668A JP2013104668A (ja) | 2013-05-30 |
| JP2013104668A5 JP2013104668A5 (ja) | 2014-12-18 |
| JP5991806B2 true JP5991806B2 (ja) | 2016-09-14 |
Family
ID=48624336
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011246253A Active JP5991806B2 (ja) | 2011-11-10 | 2011-11-10 | 航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5991806B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6433396B2 (ja) * | 2015-09-15 | 2018-12-05 | 三菱電機株式会社 | 目標追尾装置 |
| JP6505000B2 (ja) * | 2015-11-06 | 2019-04-24 | 三菱電機株式会社 | 目標追尾装置、センサシステム、追尾システム、およびプログラム |
| CN105807280B (zh) * | 2016-04-26 | 2017-12-22 | 中国船舶重工集团南京鹏力科技集团有限公司 | 基于航迹状态估计的回波融合目标的航迹关联方法 |
| JP7138545B2 (ja) * | 2018-10-26 | 2022-09-16 | 三菱電機株式会社 | 航跡統合装置、航跡統合管理装置、航跡統合プログラムおよび航跡統合管理プログラム |
| CN113687347B (zh) * | 2021-06-22 | 2023-11-17 | 中国电子科技集团公司电子科学研究院 | 一种航迹簇数据处理方法、系统及可读存储介质 |
| CN115877328B (zh) * | 2023-03-06 | 2023-05-12 | 成都鹰谷米特科技有限公司 | 一种阵列雷达的信号收发方法及阵列雷达 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10300836A (ja) * | 1997-04-22 | 1998-11-13 | Mitsubishi Electric Corp | 目標航跡監視装置 |
| JP3405262B2 (ja) * | 1999-03-31 | 2003-05-12 | 三菱電機株式会社 | レーダ統合追尾方式 |
| JP3670549B2 (ja) * | 2000-03-07 | 2005-07-13 | 株式会社東芝 | ネットワーク化要撃装置 |
| JP2002022824A (ja) * | 2000-07-07 | 2002-01-23 | Toshiba Corp | 航跡推定装置及びその方法及びプログラムを記録した記録媒体 |
| JP2002071786A (ja) * | 2000-08-28 | 2002-03-12 | Mitsubishi Electric Corp | 同一航跡判定装置 |
| JP3908497B2 (ja) * | 2001-09-21 | 2007-04-25 | 株式会社東芝 | 分散型飛翔体発射管制システムと、このシステムにおいて目標の区別に関する共通の認識を形成する方法 |
| JP4161894B2 (ja) * | 2003-12-09 | 2008-10-08 | 三菱電機株式会社 | 同一航跡判定装置 |
| JP2006177884A (ja) * | 2004-12-24 | 2006-07-06 | Mitsubishi Electric Corp | 同一航跡判定装置 |
| JP4391430B2 (ja) * | 2005-03-02 | 2009-12-24 | 三菱電機株式会社 | ネットワークレーダシステム |
| ES2504520T3 (es) * | 2006-06-13 | 2014-10-08 | Bae Systems Plc | Mejoras en relación con el seguimiento de un objetivo |
| US7508335B2 (en) * | 2006-12-20 | 2009-03-24 | Raytheon Company | Multiple sensor processing |
| JP4989331B2 (ja) * | 2007-06-21 | 2012-08-01 | 三菱電機株式会社 | 航跡統合装置及びプログラム及び航跡統合方法 |
| CA2731978C (en) * | 2008-07-30 | 2014-04-22 | Bae Systems Plc | Estimating states of a plurality of targets tracked by a plurality of sensors |
| JP5328497B2 (ja) * | 2009-06-08 | 2013-10-30 | 三菱電機株式会社 | 目標追尾装置 |
-
2011
- 2011-11-10 JP JP2011246253A patent/JP5991806B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013104668A (ja) | 2013-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5991806B2 (ja) | 航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法 | |
| US20190257659A1 (en) | Information processing device, data management device, data management system, method, and program | |
| JP5419784B2 (ja) | 予測装置及び予測システム及びコンピュータプログラム及び予測方法 | |
| JP6405778B2 (ja) | 対象追跡方法及び対象追跡装置 | |
| CN113959457B (zh) | 一种自动驾驶车辆的定位方法、装置、车辆和介质 | |
| KR102628998B1 (ko) | 크라우드 소싱 기반의 핑거프린트 데이터베이스 업데이트 방법 및 이를 위한 장치 | |
| CN111402299A (zh) | 基于静止轨道凝视卫星的遥感图像目标跟踪方法和装置 | |
| US11948312B2 (en) | Object detection/tracking device, method, and program recording medium | |
| CN115900682A (zh) | 通过序列估计和锚点检测改进道路拓扑的方法 | |
| US20220156500A1 (en) | Method for tracking sports participants, device for tracking sports participants, and system for tracking sports participants | |
| JPH04306067A (ja) | 画像処理方法および画像処理装置 | |
| US20130096869A1 (en) | Information processing apparatus, information processing method, and computer readable medium storing program | |
| JP2017063266A (ja) | 情報処理方法、情報処理装置、及びプログラム | |
| JP2016129309A (ja) | オブジェクト紐付方法、装置、及びプログラム | |
| US9239998B2 (en) | Information processing apparatus, information processing method, and computer readable medium storing program | |
| CN114096001A (zh) | 一种融合异质信号的任意组合以确定电子装置位置的概率系统及方法 | |
| JP2019158608A (ja) | 位置推定装置、位置推定プログラム、および位置推定方法 | |
| JP5701152B2 (ja) | 追尾装置及びコンピュータプログラム及び追尾方法 | |
| CN113743293B (zh) | 跌倒行为检测方法、装置、电子设备及存储介质 | |
| JP2018092368A (ja) | 移動物状態量推定装置及びプログラム | |
| JP2013125301A (ja) | 車両移動量推定装置および障害物検出装置 | |
| JP2010038753A (ja) | 運動推定装置及びプログラム | |
| JP3346326B2 (ja) | パルス列分類装置 | |
| JP2004037262A (ja) | 目標追尾装置 | |
| JP7602516B2 (ja) | 地図更新装置、地図更新方法及び地図更新用コンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141105 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141105 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150908 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151005 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160322 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160610 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20160620 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160816 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5991806 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |