JP5941761B2 - 眼科撮影装置及び眼科画像処理装置 - Google Patents
眼科撮影装置及び眼科画像処理装置 Download PDFInfo
- Publication number
- JP5941761B2 JP5941761B2 JP2012131534A JP2012131534A JP5941761B2 JP 5941761 B2 JP5941761 B2 JP 5941761B2 JP 2012131534 A JP2012131534 A JP 2012131534A JP 2012131534 A JP2012131534 A JP 2012131534A JP 5941761 B2 JP5941761 B2 JP 5941761B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- scanning position
- front image
- follow
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0025—Operational features thereof characterised by electronic signal processing, e.g. eye models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0041—Operational features thereof characterised by display arrangements
- A61B3/0058—Operational features thereof characterised by display arrangements for multiple images
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/102—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for optical coherence tomography [OCT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/14—Arrangements specially adapted for eye photography
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/04—Force
- F04C2270/041—Controlled or regulated
Description
[構成]
図1及び図2に示すように、眼科撮影装置1は、眼底カメラユニット2、OCTユニット100及び演算制御ユニット200を含んで構成される。眼底カメラユニット2は、従来の眼底カメラとほぼ同様の光学系を有する。OCTユニット100には、眼底のOCT画像を取得するための光学系が設けられている。演算制御ユニット200は、各種の演算処理や制御処理等を実行するコンピュータを具備している。
図1に示す眼底カメラユニット2には、被検眼Eの眼底Efの表面形態を表す2次元画像(眼底像)を取得するための光学系が設けられている。眼底像には、観察画像や撮影画像などが含まれる。観察画像は、たとえば、近赤外光を用いて所定のフレームレートで形成されるモノクロの動画像である。撮影画像は、たとえば、可視光をフラッシュ発光して得られるカラー画像、又は近赤外光若しくは可視光を照明光として用いたモノクロの静止画像であってもよい。眼底カメラユニット2は、これら以外の画像、たとえばフルオレセイン蛍光画像やインドシアニングリーン蛍光画像や自発蛍光画像などを取得可能に構成されていてもよい。なお、眼底カメラユニット2により撮影される任意の眼底像は「正面画像」に相当する。また、眼底カメラユニット2は「撮影部」の一例である。
図2を参照しつつOCTユニット100の構成の一例を説明する。OCTユニット100には、眼底EfのOCT画像を取得するための光学系が設けられている。この光学系は、従来のスペクトラルドメインタイプのOCT装置と同様の構成を有する。すなわち、この光学系は、低コヒーレンス光を参照光と信号光に分割し、眼底Efを経由した信号光と参照光路を経由した参照光とを干渉させて干渉光を生成し、この干渉光のスペクトル成分を検出するように構成されている。この検出結果(検出信号)は演算制御ユニット200に送られる。
演算制御ユニット200の構成について説明する。演算制御ユニット200は、CCDイメージセンサ115から入力される検出信号を解析して眼底EfのOCT画像を形成する。そのための演算処理は、従来のスペクトラルドメインタイプのOCT装置と同様である。
眼科撮影装置1の制御系の構成について図3及び図4を参照しつつ説明する。
眼科撮影装置1の制御系は、制御部210を中心に構成される。制御部210は、たとえば、前述のマイクロプロセッサ、RAM、ROM、ハードディスクドライブ、通信インターフェイス等を含んで構成される。制御部210には、主制御部211と記憶部212が設けられている。
主制御部211は前述の各種制御を行う。特に、主制御部211は、眼底カメラユニット2の合焦駆動部31A、光路長変更部41及びガルバノスキャナ42、更にOCTユニット100の光源ユニット101、光減衰器105及び偏波調整器106を制御する。
記憶部212は、各種のデータを記憶する。記憶部212に記憶されるデータとしては、たとえば、OCT画像の画像データ、眼底像の画像データ、被検眼情報などがある。被検眼情報は、患者IDや氏名などの被検者に関する情報や、左眼/右眼の識別情報などの被検眼に関する情報を含む。また、記憶部212には、眼科撮影装置1を動作させるための各種プログラムやデータが記憶されている。
画像形成部220は、CCDイメージセンサ115からの検出信号に基づいて、眼底Efの断層像の画像データを形成する。この処理には、従来のスペクトラルドメインタイプの光コヒーレンストモグラフィと同様に、ノイズ除去(ノイズ低減)、フィルタ処理、FFT(Fast Fourier Transform)などの処理が含まれている。
画像処理部230は、画像形成部220により形成されたOCT画像に対して各種の画像処理や解析処理を施す。たとえば、画像処理部230は、画像の輝度補正や分散補正等の各種補正処理を実行する。更に、画像処理部230は、OCT画像を解析して網膜厚分布を取得する層厚解析処理を実行する。また、画像処理部230は、眼底カメラユニット2により得られた画像(眼底像、前眼部像等)に対して各種の画像処理や解析処理を施す。
情報取得部231は、フォローアップ撮影で参照された正面画像(基準正面画像)と、フォローアップ撮影で得られた正面画像(フォローアップ正面画像)とを解析して、これら正面画像の間の位置ずれ情報を取得する。この位置ずれ情報は、これら正面画像における眼底Efの形態の描画位置がどれだけずれているかを定量的に表す情報である。
算出部232は、情報取得部231により取得された位置ずれ情報に基づいて、フォローアップ撮影における走査位置の誤差の評価値を算出する。この評価値の例として、基準正面画像の走査位置とフォローアップ正面画像の走査位置とにより規定される所定の画像領域の面積に基づいて算出されるものと、これら走査位置の間の変位に基づくものとがある。なお、これら以外のファクターに基づいて評価値を算出することも可能である。また、異なるファクターを組み合わせて評価値を算出するようにしてもよい。
前述のように、記憶部212に記憶されたフォローアップ撮影情報2121には、基準走査位置情報とフォローアップ走査位置情報とが含まれている。相対位置算出部2321は、基準走査位置とフォローアップ走査位置との間の相対位置情報を、情報取得部231により取得された位置ずれ情報に基づいて算出する。
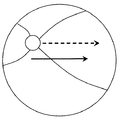
基準走査位置とフォローアップ走査位置との相対位置には、たとえば図5A〜図5Dに示すような態様がある。これら図面において、符号Rは、フォローアップ正面画像におけるフォローアップ走査位置を示す。また、符号R0は、フォローアップ正面画像における基準走査位置、つまり位置ずれ情報(相対位置情報)に基づき変位された基準走査位置を示す。図5Aは、平行移動ずれのみが介在する場合の例を示す。図5Bは、回転移動ずれのみが介在する場合であって、双方の走査位置が中心近傍で交差する場合の例を示す。図5Cは、回転移動ずれのみが介在する場合であって、双方の走査位置が走査開始点近傍で交差する場合の例を示す。図5Dは、平行移動ずれと回転移動ずれの双方が介在する場合の例を示す。なお、走査位置の相対位置の態様はこれらに限定されるものではない。また、スキャンモードはラインスキャンに限定されない。
面積算出部2323は、位置ずれ情報(相対位置情報)に基づいて、基準走査位置とフォローアップ走査位置とにより規定される画像領域の面積を算出する。ここで、前述のように、位置ずれ情報と相対位置情報は実質的に同値である。また、面積の算出対象となる画像領域は、フォローアップ正面画像の一部領域である。また、2つの走査位置に基づいて画像領域を規定する方法はあらかじめ決められている。また、面積算出処理は任意の態様で行うことができる。面積算出処理は、たとえば、画像領域内の画素数をカウントする処理、画像領域の境界領域を示す数学的表現(数式等)を求める処理、積分演算などを含んでいてもよい。また、算出結果である面積は、画像領域の2次元的な大きさを一意的に表現する数値であればよい。
変位算出部2324は、位置ずれ情報(相対位置情報)に基づいて、基準走査位置とフォローアップ走査位置との間の変位を算出する。この変位の算出方法は任意である。以下、この変位算出処理の具体例について図7を参照しつつ説明する。
評価値算出部2325は、フォローアップ撮影における走査位置の誤差の評価値を算出する。この算出処理に供される情報として、評価値算出部2325には、面積算出部2323により求められた面積の情報と、変位算出部2324により求められた変位の情報とが入力される。以下、面積に基づく評価値算出処理の例、及び変位に基づく評価値算出処理の例、並びに双方を組み合わせた評価値算出処理の例について説明する。
面積算出部2323により算出された画像領域の面積から評価値を求める処理の例として、評価値算出部2325は、この画像領域の面積と所定の重みとの積を、評価値の所定の最大値から減算する演算処理を行うことができる。この演算処理はたとえば次式のように表現される。
変位算出部2324により算出された変位から評価値を求める処理の例として、評価値算出部2325は、この変位と所定の重みとの積を評価値の所定の最大値から減算する演算処理を行うことができる。この演算処理はたとえば次式のように表現される。
面積算出部2323により算出された画像領域の面積及び変位算出部2324により算出された変位に基づいて評価値を求める処理の例として、評価値算出部2325は、上記した各々の場合を統合した演算式を用いることができる。この演算式はたとえば次のように表現される。
撮影適否判定部233は、評価値算出部2325により算出された評価値に基づいて当該フォローアップ撮影の適否を判定する。この処理は、たとえば、あらかじめ設定された数値範囲と評価値とを比較することにより行われる。
ユーザインターフェイス240には、表示部240Aと操作部240Bとが含まれる。表示部240Aは、前述した演算制御ユニット200の表示デバイスや表示装置3を含んで構成される。操作部240Bは、前述した演算制御ユニット200の操作デバイスを含んで構成される。操作部240Bには、眼科撮影装置1の筐体や外部に設けられた各種のボタンやキーが含まれていてもよい。たとえば眼底カメラユニット2が従来の眼底カメラと同様の筺体を有する場合、操作部240Bは、この筺体に設けられたジョイスティックや操作パネル等を含んでいてもよい。また、表示部240Aは、眼底カメラユニット2の筺体に設けられたタッチパネルなどの各種表示デバイスを含んでいてもよい。
眼科撮影装置1による信号光LSの走査態様(スキャンモード)としては、たとえば、水平スキャン、垂直スキャン、十字スキャン、放射スキャン、円スキャン、同心円スキャン、螺旋(渦巻)スキャンなどがある。これらの走査態様は、眼底の観察部位、解析対象(網膜厚など)、走査に要する時間、走査の精密さなどを考慮して適宜に選択的に使用される。
この実施形態による表示制御の例を説明する。表示制御は表示制御部2111により実行される。
眼科撮影装置1の作用及び効果について説明する。
フォローアップ撮影は、過去に取得された基準正面画像を参照して行われる。よって、基準正面画像の状態によってフォローアップ撮影の確度や精度が左右される。この実施形態では、第1の実施形態で説明した任意の構成に加え、フォローアップ撮影に用いられる基準正面画像が適当であるか判定できる眼科撮影装置について説明する。
この実施形態では、フォローアップ撮影を実行可能な眼科撮影装置から情報を受けて、その情報を処理する眼科画像処理装置について説明する。眼科画像処理装置は、たとえばコンピュータを含んで構成される。また、眼科画像処理装置の一部がコンピュータの外部に設けられていてもよい。たとえば、記憶部としてネットワーク上のデータベースを用いることができる。
以上に説明した構成は、この発明を好適に実施するための一例に過ぎない。よって、この発明の要旨の範囲内における任意の変形(省略、置換、付加等)を適宜に施すことが可能である。
2 眼底カメラユニット
10 照明光学系
30 撮影光学系
31 合焦レンズ
31A 合焦駆動部
41 光路長変更部
42 ガルバノスキャナ
50 アライメント光学系
60 フォーカス光学系
100 OCTユニット
101 光源ユニット
105 光減衰器
106 偏波調整器
115 CCDイメージセンサ
200 演算制御ユニット
210 制御部
211 主制御部
2111 表示制御部
212 記憶部
2121 フォローアップ撮影情報
220 画像形成部
230 画像処理部
231 情報取得部
232 算出部
2321 相対位置算出部
2322 判断部
2323 面積算出部
2324 変位算出部
2325 評価値算出部
233 撮影適否判定部
234候補画像判定部
240A 表示部
240B 操作部
E 被検眼
Ef 眼底
LS 信号光
LR 参照光
LC 干渉光
Claims (13)
- 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影を行うことが可能な眼科撮影装置であって、
被検眼を撮影して正面画像を取得する撮影部と、
前記被検眼を光で走査して断層像を形成する断層像形成部と、
前記被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置とにより規定される画像領域の面積を算出する面積算出部を含み、
前記画像領域の面積に基づいて前記評価値を求める
ことを特徴とする眼科撮影装置。 - 前記算出部は、前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置との間に共有位置が存在するか判断する判断部を含み、
前記面積算出部は、前記判断部による判断結果に応じて異なる演算処理を行なうことで前記面積を算出する
ことを特徴とする請求項1に記載の眼科撮影装置。 - 前記第1の走査位置及び前記第2の走査位置はそれぞれ線分状であり、
前記共有位置は、当該線分状の走査位置の交点であり、
前記交点が存在すると判断された場合、前記面積算出部は、前記交点に対して一方の側に位置する前記第1の走査位置及び第2の走査位置のそれぞれの端点と前記交点とがなす第1の三角形の面積と、他方の側に位置する前記第1の走査位置及び第2の走査位置のそれぞれの端点と前記交点とがなす第2の三角形の面積との和を算出し、この和の算出結果を前記画像領域の面積とする
ことを特徴とする請求項2に記載の眼科撮影装置。 - 前記第1の走査位置の端点及び/又は前記第2の走査位置の端点に前記交点が存在する場合、前記面積算出部は、当該交点の反対側に位置する前記第1の走査位置及び第2の走査位置のそれぞれの端点と当該交点とがなす三角形を前記第1の三角形としてその面積を算出し、この面積の算出結果を前記画像領域の面積とすることを特徴とする請求項3に記載の眼科撮影装置。
- 前記第1の走査位置及び前記第2の走査位置はそれぞれ線分状であり、
前記共有位置は、当該線分状の走査位置の交点であり、
前記交点が存在しないと判断された場合、前記面積算出部は、前記第1の走査位置及び前記第2の走査位置を二辺とし、かつ、前記第1の走査位置の端点及び前記第2の走査位置の端点を結ぶ線分を二辺とする四角形の面積を算出し、この面積の算出結果を前記画像領域の面積とする
ことを特徴とする請求項2に記載の眼科撮影装置。 - 前記算出部は、前記画像領域の面積から前記評価値を求める処理において、前記画像領域の面積と所定の重みとの積を前記評価値の所定の最大値から減算する演算処理を行うことを特徴とする請求項1〜請求項5のいずれか一項に記載の眼科撮影装置。
- 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影を行うことが可能な眼科撮影装置であって、
被検眼を撮影して正面画像を取得する撮影部と、
前記被検眼を光で走査して断層像を形成する断層像形成部と、
前記被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置との間の変位を算出する変位算出部を含み、
前記変位に基づいて前記評価値を求め、
更に、前記算出部は、前記変位から前記評価値を求める処理において、前記変位と所定の重みとの積を前記評価値の所定の最大値から減算する演算処理を行う
ことを特徴とする眼科撮影装置。 - 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影を行うことが可能な眼科撮影装置であって、
被検眼を撮影して正面画像を取得する撮影部と、
前記被検眼を光で走査して断層像を形成する断層像形成部と、
前記被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置とにより規定される画像領域の面積を算出する面積算出部と、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置との間の変位を算出する変位算出部と
を含み、
前記画像領域の面積及び前記変位に基づいて前記評価値を求める
ことを特徴とする眼科撮影装置。 - 前記第1の正面画像及び/又は第2の正面画像を表示部に表示させ、かつ、前記位置ずれ情報に基づいて、前記第1の走査位置を示す第1の走査位置画像と前記第2の走査位置を示す第2の走査位置画像とを当該正面画像に重ねて表示させる第1の表示制御部を有することを特徴とする請求項1〜請求項8のいずれか一項に記載の眼科撮影装置。
- 前記第1の表示制御部は、前記第1の走査位置画像と前記第2の走査位置画像とを互いに異なる態様で表示させることを特徴とする請求項9に記載の眼科撮影装置。
- 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影により得られた画像を処理する眼科画像処理装置であって、
被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における前記光の走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置とにより規定される画像領域の面積を算出する面積算出部を含み、
前記画像領域の面積に基づいて前記評価値を求める
ことを特徴とする眼科画像処理装置。 - 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影により得られた画像を処理する眼科画像処理装置であって、
被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における前記光の走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置との間の変位を算出する変位算出部を含み、
前記変位に基づいて前記評価値を求め、
更に、前記算出部は、前記変位から前記評価値を求める処理において、前記変位と所定の重みとの積を前記評価値の所定の最大値から減算する演算処理を行う
ことを特徴とする眼科画像処理装置。 - 過去に取得された被検眼の正面画像を参照し過去と同一位置を光で走査して断層像を取得するためのフォローアップ撮影により得られた画像を処理する眼科画像処理装置であって、
被検眼の第1の正面画像と、前記第1の正面画像を参照して行われたフォローアップ撮影において取得された第2の正面画像とを記憶する記憶部と、
前記第1の正面画像及び前記第2の正面画像を解析して、これら正面画像の間の位置ずれ情報を取得する情報取得部と、
前記位置ずれ情報に基づいて、当該フォローアップ撮影における前記光の走査位置の誤差の評価値を算出する算出部と
を有し、
前記記憶部は、前記第1の正面画像とともに形成された断層像の前記第1の正面画像における走査位置である第1の走査位置と、前記第2の正面画像とともに形成された断層像の前記第2の正面画像における走査位置である第2の走査位置とを更に記憶し、
前記算出部は、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置とにより規定される画像領域の面積を算出する面積算出部と、
前記位置ずれ情報に基づいて、前記第1の走査位置と前記第2の走査位置との間の変位を算出する変位算出部と
を含み、
前記画像領域の面積及び前記変位に基づいて前記評価値を求める
ことを特徴とする眼科画像処理装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131534A JP5941761B2 (ja) | 2012-06-11 | 2012-06-11 | 眼科撮影装置及び眼科画像処理装置 |
| PCT/JP2013/062597 WO2013187146A1 (ja) | 2012-06-11 | 2013-04-30 | 眼科撮影装置及び眼科画像処理装置 |
| EP13805162.8A EP2859838B1 (en) | 2012-06-11 | 2013-04-30 | Ophthalmologic photographing device and ophthalmologic image processing device |
| US14/401,751 US9486134B2 (en) | 2012-06-11 | 2013-04-30 | Ophthalmologic imaging apparatus and ophthalmologic image processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131534A JP5941761B2 (ja) | 2012-06-11 | 2012-06-11 | 眼科撮影装置及び眼科画像処理装置 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016039649A Division JP6106300B2 (ja) | 2016-03-02 | 2016-03-02 | 眼科撮影装置 |
| JP2016039648A Division JP6106299B2 (ja) | 2016-03-02 | 2016-03-02 | 眼科撮影装置及び眼科画像処理装置 |
| JP2016039650A Division JP6099782B2 (ja) | 2016-03-02 | 2016-03-02 | 眼科撮影装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013255533A JP2013255533A (ja) | 2013-12-26 |
| JP5941761B2 true JP5941761B2 (ja) | 2016-06-29 |
Family
ID=49757981
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012131534A Active JP5941761B2 (ja) | 2012-06-11 | 2012-06-11 | 眼科撮影装置及び眼科画像処理装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9486134B2 (ja) |
| EP (1) | EP2859838B1 (ja) |
| JP (1) | JP5941761B2 (ja) |
| WO (1) | WO2013187146A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6349878B2 (ja) * | 2014-03-31 | 2018-07-04 | 株式会社ニデック | 眼科撮影装置、眼科撮影方法、及び眼科撮影プログラム |
| JP6442960B2 (ja) * | 2014-09-30 | 2018-12-26 | 株式会社ニデック | 波面補償付眼底撮影装置 |
| JP6619202B2 (ja) * | 2015-10-29 | 2019-12-11 | 株式会社トプコン | 眼科撮影装置 |
| JP6624890B2 (ja) * | 2015-10-30 | 2019-12-25 | キヤノン株式会社 | 眼科撮影装置及びその制御方法、並びに、プログラム |
| JP6619217B2 (ja) * | 2015-11-26 | 2019-12-11 | オリンパス株式会社 | 顕微鏡システムとその制御方法 |
| CA3042355A1 (en) * | 2016-12-20 | 2018-06-28 | Novartis Ag | Systems and methods for wide field-of-view optical coherence tomography |
| JP6932581B2 (ja) * | 2017-08-09 | 2021-09-08 | キヤノン株式会社 | 眼科装置、情報処理装置、情報処理方法及びプログラム |
| US11547293B2 (en) | 2017-08-14 | 2023-01-10 | Optos Plc | Retinal position tracking |
| DK3668371T3 (da) * | 2017-08-14 | 2022-05-23 | Optos Plc | Oftalmisk indretning |
| JP6923393B2 (ja) * | 2017-08-28 | 2021-08-18 | 株式会社トプコン | 眼科装置、及びその制御方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09276232A (ja) | 1996-04-12 | 1997-10-28 | Nikon Corp | 眼底カメラ |
| DE19814057B4 (de) | 1998-03-30 | 2009-01-02 | Carl Zeiss Meditec Ag | Anordnung zur optischen Kohärenztomographie und Kohärenztopographie |
| JP2002139421A (ja) | 2000-11-01 | 2002-05-17 | Fuji Photo Film Co Ltd | 光断層画像取得装置 |
| JP4597744B2 (ja) | 2004-11-08 | 2010-12-15 | 株式会社トプコン | 光画像計測装置及び光画像計測方法 |
| JP4804820B2 (ja) | 2005-07-15 | 2011-11-02 | サンテック株式会社 | 光断層画像表示システム |
| JP4817184B2 (ja) * | 2006-09-08 | 2011-11-16 | 国立大学法人岐阜大学 | 画像撮影装置及び画像解析プログラム |
| JP5095167B2 (ja) | 2006-09-19 | 2012-12-12 | 株式会社トプコン | 眼底観察装置、眼底画像表示装置及び眼底観察プログラム |
| JP2008259544A (ja) | 2007-04-10 | 2008-10-30 | Topcon Corp | スリットランプ |
| JP5179102B2 (ja) | 2007-06-29 | 2013-04-10 | 株式会社ニデック | 走査型レーザ検眼鏡、及び走査型レーザ検眼鏡用広角レンズアタッチメント |
| JP5340693B2 (ja) * | 2008-11-05 | 2013-11-13 | 株式会社ニデック | 眼科撮影装置 |
| JP5355994B2 (ja) | 2008-11-05 | 2013-11-27 | 株式会社ニデック | 眼科撮影装置 |
| JP5349210B2 (ja) | 2009-08-31 | 2013-11-20 | 株式会社ニデック | 眼底画像処理装置 |
| JP5570195B2 (ja) | 2009-12-07 | 2014-08-13 | 株式会社ニデック | Oct装置 |
| JP5587014B2 (ja) * | 2010-03-31 | 2014-09-10 | 株式会社ニデック | 眼科装置 |
| JP5367047B2 (ja) * | 2011-10-24 | 2013-12-11 | 株式会社トプコン | 眼底観察装置 |
-
2012
- 2012-06-11 JP JP2012131534A patent/JP5941761B2/ja active Active
-
2013
- 2013-04-30 EP EP13805162.8A patent/EP2859838B1/en active Active
- 2013-04-30 US US14/401,751 patent/US9486134B2/en active Active
- 2013-04-30 WO PCT/JP2013/062597 patent/WO2013187146A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013187146A1 (ja) | 2013-12-19 |
| US20150138502A1 (en) | 2015-05-21 |
| EP2859838A1 (en) | 2015-04-15 |
| US9486134B2 (en) | 2016-11-08 |
| EP2859838B1 (en) | 2021-11-24 |
| JP2013255533A (ja) | 2013-12-26 |
| EP2859838A4 (en) | 2016-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5867719B2 (ja) | 光画像計測装置 | |
| JP5432625B2 (ja) | 眼科観察装置 | |
| JP5941761B2 (ja) | 眼科撮影装置及び眼科画像処理装置 | |
| JP4971872B2 (ja) | 眼底観察装置及びそれを制御するプログラム | |
| JP5981213B2 (ja) | 眼底観察装置 | |
| JP6045895B2 (ja) | 眼科観察装置 | |
| JP5415902B2 (ja) | 眼科観察装置 | |
| JP5916110B2 (ja) | 画像表示装置、画像表示方法、及びプログラム | |
| JP5543171B2 (ja) | 光画像計測装置 | |
| JP5628636B2 (ja) | 眼底画像処理装置及び眼底観察装置 | |
| JP2008237237A (ja) | 眼底観察装置、眼科画像表示装置及びプログラム | |
| JP2008206684A (ja) | 眼底観察装置、眼底画像処理装置及びプログラム | |
| JP5936254B2 (ja) | 眼底観察装置及び眼底画像解析装置 | |
| US20160089020A1 (en) | Ophthalmologic imaging apparatus and ophthalmologic image display apparatus | |
| JP5837143B2 (ja) | 眼科観察装置、その制御方法、及びプログラム | |
| JP5514026B2 (ja) | 眼底画像処理装置及び眼底観察装置 | |
| JP5658305B2 (ja) | 眼科観察装置、その制御方法、及びプログラム | |
| JP6099782B2 (ja) | 眼科撮影装置 | |
| JP6254724B2 (ja) | 眼底観察装置 | |
| JP6503040B2 (ja) | 眼科観察装置 | |
| JP6254729B2 (ja) | 眼科撮影装置 | |
| JP6021289B2 (ja) | 血流情報生成装置、血流情報生成方法、及びプログラム | |
| JP6106299B2 (ja) | 眼科撮影装置及び眼科画像処理装置 | |
| JP6106300B2 (ja) | 眼科撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160523 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5941761 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |