以下、添付図面に従って本発明の好ましい実施の形態について詳説する。
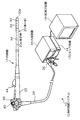
図1は、本発明が適用される立体内視鏡システム(立体内視鏡装置)の外観の概略を示した全体構成図である。同図に示す立体内視鏡システム10は、立体視用の立体画像(3D画像)を撮影して表示することが可能なシステムである。撮影に関する構成及び処理以外については、3D画像ではなく通常の2D画像(平面視用の画像)を撮影し、表示する周知の内視鏡システムと大きく相違しない。以下では、主として撮影に関連する構成、処理について説明し、その他の構成、処理については周知の任意の内視鏡システムと同様に構成することが可能であるものとする。
同図に示すように本実施の形態の立体内視鏡システム10は、立体内視鏡12(以下、内視鏡12という。)、内視鏡12が接続されたプロセッサ装置14及び光源装置16と、プロセッサ装置14に接続された3D表示装置18などから構成される。
患者の体腔内には内視鏡12が挿入され、所望の被観察部位の3D画像を表示するための左右一対の視差画像(右画像及び左画像)が内視鏡12により撮影されるようになっている。被観察部位には、光源装置16から内視鏡12に供給される照明光が照射される。また、それらの視差画像は3D画像だけでなく広角の2D画像(広角2D画像)を表示するための画像としても使用される。
内視鏡12により撮影された視差画像は、プロセッサ装置14に取り込まれ、所要の処理が施されて、3D画像や2D画像を表示するための表示画像に成形される。そして、その表示画像が3D表示装置18に出力され、3D表示装置18に3D画像や広角2D画像が内視鏡画像として表示されるようになっている。施術者は3D表示装置18に表示された内視鏡画像を観察することによって、体腔内の被観察部位を立体的又は平面的に観察することができる。
上記の内視鏡12は、患者(被検体)の体腔内に挿入可能な挿入部20と、施術者が把持して各種操作を行う操作部22と、内視鏡12をプロセッサ装置14及び光源装置16に接続するユニバーサルコード24とを備えている。
挿入部20は、長手方向の長手軸20aを中心軸として長尺状に形成され、長手軸20aに直交する断面において略円形となる外周面を有している。挿入部20は、先端部30、湾曲部32、及び軟性部34により構成されている。
先端部30は、挿入部20の先端に設けられており、長手軸20aに略直交する先端面30aを有している。この先端部30には、詳細を後述するように先端面30aに対して正面側に位置する体腔内の被観察部位を撮影する撮影部の構成部材や、撮影部で撮影する被観察部位に光源装置16からの照明光を出射する照明部の構成部材等が硬質部材に収容されて保持されている。
湾曲部32は、先端部30の基端側に連設され、操作部22のアングルノブ40の回動操作によって上下左右方向に能動的に湾曲させることができるようになっている。この湾曲部32に対する湾曲操作によって体腔内での先端部30の向きを変更して先端部30の撮影部で撮影等を行う被観察部位の方向を調整することができる。
軟性部34は、湾曲部32の基端側に連設されると共に操作部22の先端に連設され、湾曲部32の基端から操作部22の先端までの間を連結している。軟性部34は軟性で可撓性を有しており、この軟性部34が体腔内への挿入経路の形状等に応じて受動的に湾曲することによって、先端部30を体腔内の所期の位置に挿入配置することができるようになっている。軟性部34及び湾曲部32の内部には、先端部30の撮影部や照明部に接続されるケーブル、ライトガイド等が挿通配置されている。
操作部22は、挿入部20の基端側に連設されており、操作部22には、上記のアングルノブ40や、送気・送水ボタン42等の内視鏡12の操作部材が設けられている。施術者は操作部22を把持して操作部22に設けられた操作部材を操作することによって内視鏡12の各種操作を行うことができるようになっている。
また、操作部22の先端側には、処置具挿入口44が設けられている。この処置具挿入口44は、挿入部20の内部を挿通する処置具チャンネル(管路)を通じて先端部30(後述の処置具導出口54)に連通している。したがって、処置具挿入口44から所望の処置具を挿入することによって、その処置具を先端部30の処置具導出口54から導出し、処置具の種類に対応した処置を体腔内の被観察部位等に施すことができるようになっている。
ユニバーサルコード24は、操作部22から延出されており、端部には複合タイプのコネクタ26が設けられている。ユニバーサルコード24は、そのコネクタ26によりプロセッサ装置14及び光源装置16に接続されるようになっている。
このユニバーサルコード24の内部には、先端部30の撮影部や照明部から挿入部20及び操作部22の内部を挿通したケーブルやライトガイド等が挿通配置されており、撮影部に接続されたケーブル(信号線)はコネクタ26を介してプロセッサ装置14に接続され、照明部に接続されたライトガイドはコネクタ26を介して光源装置16に接続されるようになっている。
これによって、先端部30の撮影部で撮影された視差画像の撮像信号がケーブルを伝送してプロセッサ装置14に取り込まれ、光源装置16から出射された照明光がライトガイドを伝送して先端部30の照明部から出射されるようになっている。
図2は、内視鏡12の先端部30を先端面30a側から示した正面図である。同図に示すように、先端部30には、先端面30aの正面側の被観察部位を撮影する撮影部50と、被観察部位を照明する照明光を出射する照明部52とが配設されている。
撮影部50は、左右に並設された一対の撮影部50R、50L(右撮影部50R、左撮影部50L)を有し、これらの撮影部50R、50Lによって、体腔内の同一の被観察部位を異なる位置から撮影した左右一対の視差画像が撮影されるようになっている。
先端面30aには、撮影部50R、50Lの各々に被観察部位からの光を取り込む観察窓62R、62Lが配設され、照明部52から被観察部位に照明光を出射する照明窓94が配設されている。また、先端面30aには、挿入部20の処置具挿入口44から挿入されて処置具チャンネルを挿通した処置具を先端面30aから導出する処置具導出口54や、操作部22の送気・送水ボタン42の操作によって洗浄水や空気を観察窓62R、62Lに向けて噴射する送気・送水ノズル56が設けられている。
図3は、上記立体内視鏡システム10において、内視鏡画像として3D画像や広角2D画像を表示する処理部に関連する構成を示したブロック図である。
同図に示すよう内視鏡12(先端部30)には、撮影部50として左右一対の右撮影部50R(第1撮影部)と左撮影部50L(第2撮影部)が配置されており、右撮影部50Rと左撮影部50Lとは所定の中心面50aに対して対称に配置されている。撮影部50R、50Lの各々は、撮影光学系60R、60L(第1撮影光学系及び第2撮影光学系)、CCD又はMOS型(CMOS)のイメージセンサ(撮像素子)70R、70L(第1撮像素子及び第2撮像素子)、アナログ信号処理部(AFE)80R、80L、送信部82R、82L等を備えている。
右撮影部50Rと左撮影部50Lの各々の撮影光学系60R、60Lは、同一特性を有しており、詳細な構成を省略しているが複数のレンズにより構成されている。図2に示した照明部52からの照明光により照明された先端面30aに対向する被観察部位からの光は、これらの撮影光学系60R、60Lに入射し、撮影光学系60R、60Lの結像作用により、被観察部位の像をイメージセンサ70R、70Lの受光面上に形成する。
イメージセンサ70R、70Lの受光面上に形成された像は、イメージセンサ70R、70Lにより左右一対の視差画像として撮像(光電変換)されて、撮像信号としてイメージセンサ70R、70Lの各々から出力される。なお、右撮影部50Rのイメージセンサ70Rにより撮像されて得られる視差画像を右画像(第1画像)といい、左撮影部50Lのイメージセンサ70Lにより撮像されて得られる視差画像を左画像(第2画像)というものとする。
図4は、撮影部50R、50Lの撮影光学系60R、60L及びイメージセンサ70R、70Lと、それらの視野範囲に関して示した図である。
同図において、右撮影部50Rの撮影光学系60R及びイメージセンサ70Rと、左撮影部50Lの撮影光学系60L及びイメージセンサ70Lは、紙面に垂直な中心面50aに対して左右対称となるように配置されている。
右撮影部50Rの撮影光学系60R及びイメージセンサ70Rは、視野範囲VFR(第1視野範囲)の被写体を右画像として撮影し、左撮影部50Lの撮影光学系60L及びイメージセンサ70Lは、視野範囲VFLの被写体を左画像として撮影するようになっており、これらの視野範囲VFRと視野範囲VFLは上記中心面50aに対して左右対称となっており、中央部分において重なるようになっている。
同図の基準面RPは、上記中心面50aに対して直交する平面であり、例えば挿入部20の長手軸20aに対して直交している。そして、先端部30の先端面30aから所定距離Lの位置であって、撮影光学系60R、60Lによりピントが合う距離に想定されている。
この基準面RPは、撮影部50R、50Lにより撮像された左右一対の視差画像により3D表示装置18の画面に3D画像を表示した場合において、画面上の位置に存在すると認識される物点の位置を示している。即ち、基準面RP上の物点は、3D画像において画面上に存在するように表示される。基準面RPの先端面30aからの距離Lは、一般的な内視鏡においてピント位置となる8cm〜10cmであることが望ましい。また、その基準面RPの前後1cm程度は被写界深度の範囲としてピントが合うことが望ましい。
その基準面RPにおいて、視野範囲VFRと視野範囲VFLとが重なる領域は、視野範囲VFRの左端からの視野範囲3DRと、視野範囲VFLの右端からの視野範囲3DLで示されている。また、基準面RPにおいて、視野範囲VFRと視野範囲VFLとが重ならない領域のうち、視野範囲VFRのみの領域は視野範囲VFRの右端からの視野範囲2DRで示され、視野範囲VFLのみの領域は視野範囲VFLの左端からの視野範囲2DLで示されている。
なお、以下において、視野範囲VFR、VFL、3DR、3DLを個別にいう場合には、視野範囲VFRを“右全視野範囲VFR”、視野範囲VFLを“左全視野範囲VFL”、視野範囲3DRを“右3D視野範囲3DR”、視野範囲3DLを“左3D視野範囲3DL”というものとし、基準面RPにおいて右全視野範囲VFRと左全視野範囲VFLが重なる視野範囲(即ち、右3D視野範囲3DRと左3D視野範囲3DLとを合わせた視野範囲)を“3D視野範囲3DR&3DL”というものとする。また、視野範囲2DR、2DLを個別にいう場合には、視野範囲2DRを“右2D視野範囲2DR”、視野範囲2DLを“左2D視野範囲2DL”というものとする。
同図に示す被写体O1、O2、O3は、基準面RP上に存在する物体を例示しており、被写体O1は、3D視野範囲3DR&3DLに存在し、被写体O2は、右2D視野範囲2DRに存在し、被写体O3は、左2D視野範囲2DLに存在している。被写体O4、O5は、3D視野範囲3DR&3DLに存在するが、基準面RP上に存在しない被写体を示しており、被写体O4は、基準面RPよりも先端面30aに近い位置に存在し、被写体O5は、基準面RPよりも先端面30aから遠い位置に存在する被写体を示している。
これらの被写体O1〜O5が存在する場合に、右撮影部50Rと左撮影部50Lの各々により、図4の上部及び図5(A)、(B)に示すような右画像IRと左画像ILが左右一対の視差画像として撮影される。右画像IRには、被写体O1〜O5のうち、被写体O1、O2、O4、O5の画像が映り込み、それらの画像が各々、被写体画像O1R、O2、O4R、O5Rとして示されている。左画像ILには、被写体O1〜O5のうち、被写体O1、O3、O4、O5の画像が映り込み、それらの画像が各々、被写体画像O1L、O3L、O4L、O5Lとして示されている。
図4の上部に示す右画像IRと左画像ILは、基準面RPにおいて右撮影部50Rの右全視野範囲VFRと左撮影部50Lの全視野範囲VFLが互いに重なる視野範囲である右3D視野範囲3DRと左3D視野範囲3DLの画像を3D視野範囲3DR&3DLの画像として重ねて示したものである。
このような位置関係で右画像IRと左画像ILを表示した場合において、基準面RP上の3D視野範囲3DR&3DLに存在する被写体の画像は、被写体O1の画像である右画像IRにおける被写体画像O1Rと左画像ILにおける被写体画像O1Lを合わせて示した被写体画像O1R&O1Lのように同一位置に表示される。
一方、3D視野範囲3DR&3DLに存在するが、基準面RPよりも先端面30aからの距離が近い位置に存在する被写体の画像は、被写体O4の画像である右画像IRにおける被写体画像O4Rと左画像ILにおける被写体画像O4Lのように、右画像IRでは左側、左画像ILでは右側となる異なる位置に分離されて表示される。
これとは反対に、3D視野範囲3DR&3DLに存在するが、基準面RPよりも先端面30aからの距離が遠い位置に存在する被写体の画像は、被写体O5の画像である右画像IRにおける被写体画像O5Rと左画像ILにおける被写体画像O5Lのように、右画像IRでは右側、左画像ILでは左側となる異なる位置に分離されて表示される。
また、右全視野範囲VFRと左全視野範囲VFLとが重ならない領域であって右2D視野範囲2DRに存在する被写体の画像は、基準面RP上に存在する被写体O2の画像である右画像IRにおける被写体画像O2のように、右画像IRの右2D視野範囲2DRのみに表示される。同様に、右全視野範囲VFRと左全視野範囲VFLとが重ならない領域であって左2D視野範囲2DLに存在する被写体の画像は、基準面RP上の左2D視野範囲2DLに存在する被写体O3の画像である左画像ILにおける被写体画像O3ように、左画像ILの左2D視野範囲2DLのみに表示される。
したがって、3D表示装置18において、右撮影部50Rによって撮影された右全視野範囲VFRの右画像IRと左撮影部50Lによって撮影された左全視野範囲VFLの左画像ILとを、図4の上部のように右3D視野範囲3DRの画像と左3D視野範囲3DLの画像とが重なるように3D画像として表示することで、3D視野範囲3DR&3DLの領域に存在する被写体O1、O4、O5のような被写体を観察者が立体視することができる。被写体O1のように基準面RP上に存在する被写体は3D表示装置18の画面上に存在する被写体として認識され、被写体O4のように基準面RPよりも近い位置に存在する被写体は3D表示装置18の画面よりも近い位置に存在する被写体として認識され、被写体O5のように基準面RPよりも遠い位置に存在する被写体は3D表示装置18の画面よりも遠い位置に存在する被写体として認識される。
また、右2D視野範囲2DRや左2D視野範囲2DLのように撮影部50R、50Lのうちの一方のみによって撮影される領域に存在する被写体も2D画像として表示することができるため、3D視野範囲3DR&3DLの3D画像よりも広角の視野範囲の被観察部位の様子を観察することができる。
図3に戻り、上記のように右撮影部50Rの撮影光学系60R及びイメージセンサ70Rにより撮影される右画像IRと、左撮影部50Lの撮影光学系60L及びイメージセンサ70Lにより撮影される左画像ILは、各々、イメージセンサ70R、70Lからアナログの撮像信号として出力され、アナログ信号処理部(AFE)80R、80Lに取り込まれる。
AFE80R、80Lでは、相関二重サンプリング(CDS)、自動ゲイン(AGC)、及びアナログ/デジタル変換(A/D)等のアナログ信号処理が撮像信号に対して施され、パラレルのデジタル信号としてAFE80R、80Lから送信部82R、82Lに出力される。
送信部82R、82Lでは、パラレル/シリアル変換処理等が撮像信号に対して施され、シリアルのデジタル信号として撮影部50R、50Lに接続されたケーブル(信号線)に送出される。そのケーブルは、挿入部20、操作部22、及び、ユニバーサルコード24の内部を挿通してプロセッサ装置14の受信部100に接続されており、ケーブルに送出された撮像信号は受信部100で受信される。
ここで、本実施の形態では、3D表示装置18に内視鏡画像を動画として表示するものとすると、イメージセンサ70R、70Lの各々において動画を構成するフレーム画像として右画像IRと左画像ILが連続的に撮像され、フレーム画像として順次撮像された右画像IRと左画像ILの撮像信号が、フレーム画像ごとにシリアルのデジタル信号として送信部82R、82Lの各々から受信部100に順次伝送されるようになっている。
なお、送信部82R、82LDから受信部100への撮像信号の伝送には、例えば、低電圧作動信号(LVDS)等によりデータ伝送を行う高速デジタル伝送技術を用いることが望ましい。また、右画像IRと左画像ILの撮像信号は異なる信号線により並列に伝送するようにしてもよいし、共通の信号線により交互に送信するようにしてもよい。
プロセッサ装置14は、内視鏡画像を表示するための処理部として、受信部100、画像処理部102、表示画像生成部104、表示制御部106等を備えている。
受信部100では、内視鏡12の右撮影部50R、左撮影部50Lから送信されてケーブルを介してシリアルのデジタル信号として伝送された右画像IRと左画像ILの各々の撮像信号が受信され、それらの撮像信号に対してパラレル/シリアル変換処理等が施される。これによって、撮像信号が、送信部82R、82Lにおいて変換される前のパラレルのデジタル信号に復元されて画像処理部102に取り込まれる。
画像処理部102では、色分離、色補間、ゲイン補正、ホワイトバランス調整、ガンマ補正、輪郭強調処理、明度の調整処理などのデジタル画像処理が施される。これによって、右画像IRと左画像ILの各々の撮像信号が、表示に適した画像データとして生成され、その画像データが表示画像生成部104に取り込まれる。
なお、画像処理部102では、右画像IRと左画像ILの画像データが順次生成されて、その画像データが不図示のメモリに一次的に記憶されると共に最新の画像データに順次更新される。表示画像生成部104には、そのメモリから最新の画像データが順次取り込まれるようになっている。
表示画像生成部104では、3D表示装置18の画面全体に表示される右眼用表示画像と左眼用表示画像の画像データが、画像処理部102から順次取り込まれる右画像IRと左画像ILの画像データを用いて生成される。右眼用表示画像は、観察者の右眼によって視認される画面全体の画像を示し、その中に内視鏡画像として右画像IRの一部又は全ての画像が含められる。左眼用表示画像は、観察者の左眼によって視認される画面全体の画像を示し、その中に内視鏡画像として左画像ILの一部又は全ての画像が含められる。これらの右眼用表示画像と左眼用表示画像の画像データは、右画像IRと左画像ILの画像データの更新等と共に順次更新されて表示制御部106に出力される。なお、表示画像生成部104の処理についての詳細は後述する。
表示制御部106では、表示画像生成部104により生成された右眼用表示画像と左眼用表示画像を3D表示装置18に表示させるための映像信号が、表示画像生成部104から与えられた右眼用表示画像と左眼用表示画像の画像データに基づいて生成される。映像信号は3D表示装置18において対応可能な規格のものに生成される。その映像信号が3D表示装置18に出力される。
3D表示装置18では、表示制御部106からの映像信号に従って画像の表示が行われ、表示画像生成部104により生成された右眼用表示画像と左眼用表示画像の各々が右眼と左眼のうちの対応する一方の眼によって視認されるように表示される。そして、右眼用表示画像と左眼用表示画像の各々に含まれる右画像IRと左画像ILとの表示とその更新によって、内視鏡画像が動画として表示されると共に、被観察部位の3D画像や2D画像が表示されるようになっている。
ここで、周知の3D表示装置として、1台のモニタの画面に右眼用表示画像と左眼用表示画像とを交互に表示し、これに同期して左右交互に開閉するシャッターメガネを介して右眼で右眼用表示画像を観察し左眼で左眼用表示画像を観察する方式(フレームシーケンシャル方式)のものや、1台のモニタの画面に右眼用表示画像と左眼用表示画像とを例えば走査線単位で交互に表示し、左右で偏光方向の異なる偏光フィルターメガネを介してを右眼で右眼用表示画像を観察し左眼で左眼用表示画像を観察する方式(偏光方式)のものや、1台のモニタの画面に微細なレンズを並べて画面を見る角度によって異なる画像を表示できるようにしたものに右眼用表示画像と左眼用表示画像を表示し、裸眼でも右眼で右眼用表示画像を観察し左眼で左眼用表示画像を観察できるようにした方式(インテグラルイメージング方式)のものや、1台のモニタの画面に微細な縦縞状の遮光物を配置して画面を見る角度によって異なる画像を表示できるようにしたものに右眼用表示画像と左眼用表示画像を表示し、裸眼でも右眼で右眼用表示画像を観察し左眼で左眼用表示画像を観察できるようにした方式(視差バリア方式)のものが知れられている。また、ヘッドマウントディスプレイのように右眼用と左眼用の2台のモニタの各々に右眼用表示画像と左眼用表示画像とを表示し、右眼で右眼用表示画像を観察し左眼で左眼用表示画像を観察する方式のもの等も知られている。本実施の形態の3D表示装置18としては、どのような方式のものでも採用することができる。また、3D画像と2D画像とを別のモニタに表示する構成としても良い。
続いて、表示画像生成部104の処理内容について具体的に説明する。
図6〜図8は、表示画像生成部104によって生成される表示画像(右眼用表示画像及び左眼用表示画像)の3D表示装置18での画面構成を例示した図であり、内視鏡画像を表示する表示エリアを例示した図である。
図6の形態の画面構成では、内視鏡画像の表示エリアとして3D画像&広角2D画像表示エリア150を画面内に有している。この3D画像&広角2D画像表示エリア150は、図5(A)、(B)のように撮影部50R、50Lにより撮影された右画像IRと左画像ILとを、図4の上部に示したように右3D視野範囲3DRの画像と左3D視野範囲3DLの画像とが重なるように表示するエリアである。
これによって、3D視野範囲3DR&3DLの画像が3D画像として3D表示され、その両脇の右2D視野範囲2DRと左2D視野範囲2DLの画像が広角2D画像として2D表示される。
詳細な説明は省略するが、画面内における3D画像&広角2D画像表示エリア150以外の領域には、患者情報や内視鏡12の状態情報等の他の情報に関する文字や画像が表示される。図7及び図8の形態における内視鏡画像の表示エリア以外の領域についても同様である。
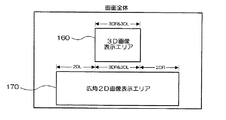
図7の形態の画面構成では、内視鏡画像の表示エリアとして3D画像表示エリア160と広角2D画像表示エリア170を画面内に個別に有している。3D画像表示エリア160は、図5(A)、(B)のように撮影部50R、50Lにより撮影された右画像IRと左画像ILのうち、右3D視野範囲3DRの画像と左3D視野範囲3DLの画像のみを、図4の上部に示した3D視野範囲3DR&3DLの画像のように同一位置に表示するエリアである。これによって、3D視野範囲3DR&3DLの画像が3D画像として3D表示される。
なお、3D画像表示エリア160に3D画像として表示する視野範囲は3D視野範囲3DR&3DLよりも左右に一定量拡げた範囲としても良い。
一方、広角2D画像表示エリア170は、詳細を後述するように3D視野範囲3DR&3DLの画像と、その左右両側の右2D視野範囲2DRと左2D視野範囲2DLの画像を広角2D画像として2D表示するエリアである。
図8の形態は、内視鏡画像の表示エリアとして、同図(A)のように図7と同様の3D画像表示エリア160を有する画面と、同図(B)のように図7と同様の広角2D画像表示エリア170を有する画面との2つの構成の画面を有し、それらの画面を表示モードの種類によって切り替えるようにした形態を示している。
表示モードとして3D画像表示モードが選択された場合には、同図(A)のように3D画像表示エリア160を有する画面が表示され、広角2D画像表示モードが選択された場合には、同図(B)のように広角2D画像表示エリア170を有する画面が表示される。表示モードの切替えは、プロセッサ装置14に接続された不図示の入力装置の操作によって、又は、内視鏡12の操作部22に設けられた操作部材の操作によって観察者が行うようにすることができる。
なお、図8(A)、(B)の画面構成は、3D画像と広角2D画像とを別のモニタに表示する場合の画面構成としても適用できる。
また、図6〜図8に示した内視鏡画像の表示エリア以外にも、右画像IRのみ又は左画像ILのみを2D画像として2D表示する表示エリア等も設けるようにしてもよい。
更に、図6〜図8に示した画像構成は一例であって、任意の種類の表示エリア(3D画像&広角2D画像表示エリア150、3D画像表示エリア160、及び広角2D画像表示エリア170等)のうちのいずれか1つ又は複数の種類の表示エリアを有する画面構成としても良く、それらの画面を表示モードの選択によって切り替えるようにしてもよい。また、複数の種類の表示エリアを1つの画面内に表示する場合にそれらを異なる領域に配置する構成ではなく、1つの表示エリア内の一部に他の表示エリアを配置するいわゆるPinP表示の構成としても良い。
図3の表示画像生成部104は、これらの図6〜図8に例示したような画面構成に対応した右眼用表示画像と左眼用表示画像とを生成する。その際に、右眼用表示画像における内視鏡画像の表示エリアの画像と、左眼用表示画像における内視鏡画像の表示エリアの画像を画像処理部102により順次生成される右画像IRの画像データと左画像ILの画像データの最新のものを使用して生成する。この内視鏡画像の表示エリアの生成処理について、図6〜図8に示した3D画像&広角2D画像表示エリア150、3D画像表示エリア160、及び広角2D画像表示エリア170を生成する場合を以下で例示する。また、内視鏡画像の表示エリア以外の画像については不図示のCPU等の処理部により生成された画像データや文字データ等を取得して生成するが、詳細な説明は省略する。
なお、以下において、右眼用表示画像における内視鏡画像の表示エリアの画像をその表示エリアの右表示画像といい、同様に左眼用表示画像における内視鏡画像の表示エリアの画像をその表示エリアの左表示画像という。
図9は、図6における3D画像&広角2D画像表示エリア150の右表示画像及び左表示画像を生成する処理の概要を示した図であり、同図(A)は、3D画像&広角2D画像表示エリア150の右表示画像の生成処理を示し、同図(B)は、3D画像&広角2D画像表示エリア150の左表示画像の生成処理を示している。
同図(A)、(B)に示すように3D画像&広角2D画像表示エリア150は、中央部に3D視野範囲3DR&3DL(図4参照)の画像を表示する領域150Mと、領域150Mの右側において右2D視野範囲2DR(図4参照)の画像を表示する領域150Rと、領域150Mの左側において左2D視野範囲2DL(図4参照)の画像を表示する領域150Lとにより形成されている。
まず、3D画像&広角2D画像表示エリア150の右表示画像について説明すると、同図(A)に示すように、3D画像&広角2D画像表示エリア150の3D視野範囲3DR&3DL及び右2D視野範囲2DRの領域150M、150Rには、右撮影部50Rにより撮影された右全視野範囲VFRの右画像IR(右画像IRの右3D視野範囲3DRの画像及び右2D視野範囲2DRの画像)が嵌め込まれる。
このとき、画像処理部102によって順次生成される右画像IRの最新の画像データを用いて、3D視野範囲3DR&3DL及び右2D視野範囲2DRの領域150M、150Rの画像の画像データが生成される。そして、その際に、3D表示装置18の画面上における3D画像&広角2D画像表示エリア150の解像度に適合するように、右画像IRの画像データに対して間引き処理又は補間処理などが施される。
また、3D画像&広角2D画像表示エリア150の左2D視野範囲2DLの領域150Lには、例えば無模様の黒色画像が嵌め込まれる。
これにより、3D画像&広角2D画像表示エリア150の右表示画像として同図(A)に示すような右表示画像150DRが生成される。
次いで3D画像&広角2D画像表示エリア150の左表示画像について説明すると、同図(B)に示すように、3D画像&広角2D画像表示エリア150の3D視野範囲3DR&3DL及び左2D視野範囲2DLの領域150M、150Lには、左撮影部50Lにより撮影された左全視野範囲VFLの左画像IL(左画像ILの左3D視野範囲3DLの画像及び左2D視野範囲2DLの画像)が嵌め込まれる。このとき、画像処理部102によって順次生成される左画像ILの最新の画像データを用いて、3D視野範囲3DR&3DL及び左2D視野範囲2DLの領域150M、150Lの画像の画像データが生成され、その際に、3D表示装置18の画面上における3D画像&広角2D画像表示エリア150の解像度に適合するように、左画像ILの画像データに対して間引き処理又は補間処理などが施される。
また、3D画像&広角2D画像表示エリア150の右2D視野範囲2DRの領域150Rには、例えば無模様の黒色画像が嵌め込まれる。
これにより、3D画像&広角2D画像表示エリア150の左表示画像として同図(B)に示すような左表示画像150DLが生成される。
以上のようにして生成された右表示画像150DRと左表示画像150DLとが3D表示装置18の画面上における3D画像&広角2D画像表示エリア150に表示されると共に、右表示画像150DRが観察者の右眼のみで視認できるように、且つ、左表示画像150DLが観察者の左眼のみで視認できるように表示されることによって、3D視野範囲3DR&3DLの領域150Mの画像が立体視可能な3D画像として3D表示される。また、右2D視野範囲2DRの領域150Rと左2D視野範囲2DLの領域150Lの画像が広画角範囲の2D画像として表示される。
なお、図9に示した形態では、3D画像&広角2D画像表示エリア150の右表示画像150DRにおける左2D視野範囲2DLの領域150Lの画像を黒色画像とし、また、3D画像&広角2D画像表示エリア150の左表示画像150DLにおける右2D視野範囲2DRの領域150Rの画像を黒色画像としたが、これに限らない。例えば、図9と同様の図面構成で示した図10の変形例のようにしても良い。
図10(A)に示すように、3D画像&広角2D画像表示エリア150の右表示画像150DRにおける左2D視野範囲2DLの領域150Lには、左画像ILの左2D視野範囲2DLの画像が嵌め込まれる。これによって、3D画像&広角2D画像表示エリア150の右表示画像として同図(A)に示すような右表示画像150DRが生成される。
一方、図10(B)に示すように、3D画像&広角2D画像表示エリア150の左表示画像150DLにおける右2D視野範囲2DRの領域150Rには、右画像IRの右2D視野範囲2DRの画像が嵌め込まれる。これによって、3D画像&広角2D画像表示エリア150の左表示画像として同図(B)に示すような左表示画像150DLが生成される。
これによれば、3D画像&広角2D画像表示エリア150の右表示画像150DRと左表示画像150DLの両方において、右2D視野範囲2DRの領域150Rと左2D視野範囲2DLの領域150Lとに撮影部50R、50Lで撮影された画像が表示されるため、それらの領域の画像を両眼で視認することができ、違和感なく広角2D画像を観察することができる。
図11は、図7及び図8(A)における3D画像表示エリア160の右表示画像及び左表示画像を生成する処理の概要を示した図であり、同図(A)は、3D画像表示エリア160の右表示画像の生成処理を示し、同図(B)は、3D画像表示エリア160の左表示画像の生成処理を示している。
同図(A)、(B)に示すように3D画像表示エリア160は、3D視野範囲3DR&3DL(図4参照)の画像を表示する領域のみにより形成されている。
まず、3D画像表示エリア160の右表示画像について説明すると、同図(A)に示すように、3D画像表示エリア160(3D視野範囲3DR&3DLの領域)には、右撮影部50Rにより撮影された右全視野範囲VFRの右画像IRのうちの右3D視野範囲3DRの画像が嵌め込まれる。このとき、画像処理部102によって順次生成される右画像IRの最新の画像データを用いて、3D画像表示エリア160の画像の画像データが生成され、その際に、3D表示装置18の画面上における3D画像表示エリア160の解像度に適合するように右画像IRの画像データに対して間引き処理又は補間処理などが施される。
これにより、3D画像表示エリア160の右表示画像として同図(A)に示すような右表示画像160DRが生成される。即ち、右画像IRにおける右3D視野範囲3DRの画像が3D画像表示エリア160の右表示画像として生成される。
次いで3D画像表示エリア160の左表示画像について説明すると、同図(B)に示すように、3D画像表示エリア160(3D視野範囲3DR&3DLの領域)には、左撮影部50Lにより撮影された左全視野範囲VFLの左画像ILのうちの左3D視野範囲3DLの画像が嵌め込まれる。このとき、画像処理部102によって順次生成される左画像ILの最新の画像データを用いて、3D画像表示エリア160の画像の画像データが生成され、その際に、3D表示装置18の画面上における3D画像表示エリア160の解像度に適合するように左画像ILの画像データに対して間引き処理又は補間処理などが施される。
これにより、3D画像表示エリア160の左表示画像として同図(B)に示すような左表示画像160DLが生成される。即ち、左画像ILにおける左3D視野範囲3DLの画像が3D画像表示エリア160の左表示画像として生成される。
以上のようにして生成された右表示画像160DRと左表示画像160DLとが3D表示装置18の画面上における3D画像表示エリア160に表示されると共に、右表示画像160DRが観察者の右眼のみで視認できるように、且つ、左表示画像160DLが観察者の左眼のみで視認できるように表示されることによって、3D画像表示エリア160の画像(3D視野範囲3DR&3DLの画像)が立体視可能な3D画像として3D表示される。
図12は、図7及び図8(B)における広角2D画像表示エリア170の右表示画像及び左表示画像を生成する処理の概要を示した図であり、同図(A)は、広角2D画像表示エリア170の右表示画像の生成処理を示し、同図(B)は、広角2D画像表示エリア170の左表示画像の生成処理を示している。
同図(A)、(B)に示すように広角2D画像表示エリア170は、図9の3D画像&広角2D画像表示エリア150と同様に、中央部に3D視野範囲3DR&3DL(図4参照)の画像を表示する領域170Mと、領域170Mの右側において右2D視野範囲2DR(図4参照)の画像を表示する領域170Rと、領域170Mの左側において左2D視野範囲2DL(図4参照)の画像を表示する領域170Lとにより形成されている。
まず、広角2D画像表示エリア170の右表示画像について説明すると、同図(A)に示すように、広角2D画像表示エリア170の3D視野範囲3DR&3DL及び右2D視野範囲2DRの領域170M、170Rには、右撮影部50Rにより撮影された右全視野範囲VFRの右画像IR(右画像IRの右3D視野範囲3DRの画像及び右2D視野範囲2DRの画像)が嵌め込まれる。このとき、画像処理部102によって順次生成される右画像IRの最新の画像データを用いて、3D視野範囲3DR&3DL及び右2D視野範囲2DRの領域170M、170Rの画像の画像データが生成され、その際に、3D表示装置18の画面上における広角2D画像表示エリア170の解像度に適合するように、右画像IRの画像データに対して間引き処理又は補間処理などが施される。
一方、広角2D画像表示エリア170の左2D視野範囲2DLの領域170Lには、左画像ILの左2D視野範囲2DLの画像が嵌め込まれる。このときも同様に画像処理部102によって順次生成される左画像ILの最新の画像データを用いて、左2D視野範囲2DLの領域170Lの画像の画像データが生成され、その際に、3D表示装置18の画面上における広角2D画像表示エリア170の解像度に適合するように、左画像ILの画像データに対して間引き処理又は補間処理などが施される。
これにより、広角2D画像表示エリア170の右表示画像として同図(A)に示すような右表示画像170DRが生成される。
広角2D画像表示エリア170の左表示画像は、上述の右表示画像170DRと完全に一致した処理により生成され、同図(B)に示すように左表示画像170DLは、右表示画像170DRと完全に一致した画像となる。
以上のようにして生成された右表示画像170DRと左表示画像170DLとが、3D表示装置18の画面上における広角2D画像表示エリア170に表示されると共に、右表示画像170DRが観察者の右眼のみで視認できるように、且つ、左表示画像170DLが観察者の左眼のみで視認できるように表示された場合に、右眼と左眼とで完全に一致した画像が視認される。したがって、広角2D画像表示エリア170の全範囲における画像が広画角範囲の2D画像として表示される。
なお、広角2D画像表示エリア170の画像を表示するモニタ(画面)は、3D画像を表示するモニタとは別の2D画像を表示するモニタを使用するようにしてもよく、その場合には広角2D画像表示エリア170の右表示画像と左表示画像(画面全体に対する右眼用表示画像と左眼用表示画像)を生成する必要はなく、一方のみを生成して2D表示装置に表示させるようにすればよい。
また、図12では、右表示画像170DRと左表示画像170DLのいずれにおいても、広角2D画像表示エリア170の3D視野範囲3DR&3DLの領域170Mに対して、右画像IRの右3D視野範囲3DRの画像を嵌め込むようにしたが、その代わりに左画像ILの左3D視野範囲3DLの画像を嵌め込むようにしてもよいし、右画像IRの右3D視野範囲3DRの画像と左画像ILの左3D視野範囲3DLの画像とを用いて生成した画像を嵌め込むようにしてもよい。
以上、上記実施の形態では、撮影部50R、50Lにより撮影された右画像IRと左画像ILをプロセッサ装置14に取り込んで、3D表示装置18に3D画像や広角2D画像として表示する場合について説明したが、プロセッサ装置14に取り込んだ右画像IRと左画像IL、又は、これらによって形成された3D画像や広角2D画像等を記憶手段に記憶させることもできる。
次に、上記実施の形態を基本の実施の形態として、その基本の実施の形態に対して3D表示装置18における3D画像の高品質化(3D動画の円滑化等)を図るための変形例について説明する。
本発明は、3D画像を形成する右3D視野範囲3DRと左3D視野範囲3DLの画像の取込み周期が2D画像を形成する右2D視野範囲2DRと左2D視野範囲2DLの画像の取込み周期よりも短くなるようにし、3D画像のフレームレートが2D画像のフレームレートよりも高くなるように構成するものである。
これによって、システムの処理負担を増加させないという前提の元で、それらのフレームレートが同等である構成と比較したときに、2D画像に対する処理負担を減らし、3D画像に対するシステムの処理負担を増やすものとして3D画像のフレームレートや解像度を高くすることが可能となり、3D画像の高品質化を図ることできる。即ち、円滑な3D動画や高解像度の3D動画を得ることができる。
なお、本発明は、2D画像のフレームレートを低くしも3D画像よりは品質の低下が少ないことを前提とするものであるが、それにも限度があるため2D画像の品質の低下を許容できる範囲で2D画像のフレームレートを3D画像のフレームレートよりも低くすることが望ましい。
上記基本の実施の形態では、図5(A)に示したように右撮影部50Rにおいて右3D視野範囲3DRと右2D視野範囲2DRとからなる右全視野範囲VFRの右画像IRを1フレーム画像として連続的に取り込み、図5(B)に示したように左撮影部50Lにおいて左3D視野範囲3DLと左2D視野範囲2DLとからなる左全視野範囲VFLの左画像ILを1フレームの画像として取り込むようにしている。
一方、本変形例1の実施の形態では、右撮影部50Rにおいて右全視野範囲VFRの全体画像の取り込みと、右3D視野範囲3DRのみの画像の取り込みとを特定の割合で順に行うようにし、左撮影部50Lにおいても左全視野範囲VFLの全体画像の取り込みと、左3D視野範囲3DLの画像の取り込みとを特定の割合で順に行うようにする。
図13は、図4に示した撮影部50R、50Lの撮影状態に対して、本変形例1の実施の形態において撮影部50R、50Lの各々により取り込まれる右画像IRと左画像ILを示した図である。
同図(A)に示すように、右撮影部50Rでは、右画像IRとして、基本の実施の形態と同様に右全視野範囲VFRの全体画像からなる右画像IR1と、3D画像の表示に使用される右3D視野範囲3DRのみの画像からなる右画像IR2が取り込まれる。
即ち、図14(A)、(B)に示すように、イメージセンサ70Rの受光面において、右3D視野範囲3DRの画像を撮像する領域を230Rとし、右画像IRの右2D視野範囲2DRの画像を撮像する領域232Rとすると、同図(A)に示すように、イメージセンサ70Rの受光面の領域230Rと領域232Rの全範囲の画素データをイメージセンサ70Rから連続して読み出すことによって右画像1R1が取り込まれる。
一方、同図(B)に示すように、イメージセンサの受光面の領域232Rのみの画素データをイメージセンサ70Rから読み出すことによって右画像IR2が取り込まれる。
これらの右画像IR1と右画像IR2の取り込みは、特定の割合で行われる。例えば、1:1の割合として右画像IR1と右画像IR2とを交互に取り込むこともできるし、1:2の割合として、右画像IR1、右画像IR2、右画像IR2の順に取り込むこともできる。後述のようにこの割合を変更することによって3D画像のフレームレートと2D画像のフレームレートとを変更することもできる。
これと同様に、図13(B)に示すように、左撮影部50Lでは、左画像ILとして、基本の実施の形態と同様に左全視野範囲VFLの全体画像からなる左画像IL1と、3D画像の表示に使用される左3D視野範囲3DLのみの画像からなる左画像IL2が取り込まれる。これらの左画像IL1と左画像IL2の取り込みは、右画像IR1と右画像IR2の取り込みと同じ割合で行われる。また、右画像IR1の取り込みと左画像IL1の取り込みとが同期して行われ、右画像IR2の取り込みと左画像IL2の取り込みとが同期して行われる。ただし、必ずしもこれらの取り込みが同期して行われなくてもよく、また、右画像IR1と右画像IR2の取り込みの割合と左画像IL1と左画像IL2の取り込みの割合とが一致していなくてもよい。
このような右画像IR(右画像IR1、右画像IR2)と左画像IL(左画像IL1、左画像IL2)の取り込みによれば、3D画像の表示に使用される右3D視野範囲3DRと左3D視野範囲3DLの画像は、順次取り込まれる右画像IR1、右画像IR2、左画像IL、左画像IL2の全てにより取り込まれるのに対して、2D画像の表示に使用される右2D視野範囲2DRと左2D視野範囲2DLの画像は、右画像1R1と左画像1L1のみにより取り込まれる。
したがって、3D画像(3D動画)を形成する右3D視野範囲3DRと左3D視野範囲3DLの画像の取込み周期が、2D画像(2D動画)を形成する右2D視野範囲2DRと左2D視野範囲2DLの画像の取込み周期より短く、3D画像(3D動画)のフレームレートを2D画像(2D動画)のフレームレートよりも高くすることができる。これによって、2D画像のデータに対するシステムの処理負担が軽減された分、3D画像のフレームレートや解像度を高くすることが可能となり、3D画像の高品質化を図ることができる。
次に上記変形例1における右画像IRと左画像ILの取り込みに対する上記表示画像生成部104での表示画像の生成処理について説明する。
まず、図6における3D画像&広角2D画像表示エリア150の右表示画像及び左表示画像を生成する場合の処理について説明する。なお、右表示画像と左表示画像は同様の処理により生成されるため、ここでは右表示画像の生成処理についてのみ詳説する。
右撮影部50Rにより上記のように順次取り込まれる図13(A)に示した右画像IR1、IR2は、プロセッサ装置14に伝送されて画像処理部102で表示用の画像データとして順次生成され、表示画像生成部104に取り込まれる。
表示画像生成部104では、画像処理部102により右画像1R1の画像データが得られたときには、その画像データを用いて図9(A)又は図10(A)に示した基本の実施の形態における生成処理と同一の処理が行われる。これによって図9(A)又は図10(A)の右表示画像150DRが生成される。そして、その右表示画像150DRが最新のものとされる。
一方、画像処理部102により右画像1R2の画像データが得られたときには、図15(A)に示すように、表示画像生成部104により既に生成された最新の右表示画像150DRに対して3D視野範囲3DR&3DLの画像の画像データのみが、その右画像IR2の画像データで置き換えられる。これによって3D視野範囲3DR&3DLの画像のみが更新された新たな右表示画像150DRが生成され、その右表示画像150DRが最新のものとされる。
そして、このような生成処理が画像処理部102により右画像1R1又は右画像IR2の画像データが得られるごとに繰り返される。
左表示画像についても同様に、左画像IL1の画像データが得られたときには図9(B)又は図10(B)に示した基本の実施の形態における生成処理と同一の処理により左表示画像150DLが生成され、左画像1L2の画像データが得られたときには、図15(B)に示すように、最新の左表示画像150DLの3D視野範囲3DR&3DLの画像のみが更新される。
このようにして順次生成される右表示画像150DRと左表示画像150DLとが3D表示装置18の画面上における3D画像&広角2D画像表示エリア150に表示されることによって、3D画像として表示される3D視野範囲3DR&3DLの画像のフレームレートが、2D画像として表示される右2D視野範囲2DRと左2D視野範囲2DLの画像のフレームレートよりも実質的に高くなる。
次に、図7及び図8(A)における3D画像表示エリア160の右表示画像及び左表示画像を生成する場合の処理について説明する。なお、右表示画像と左表示画像は同様の処理により生成されるため、ここでは右表示画像の生成処理についてのみ詳説する。
上述のように右撮影部50Rにより順次取り込まれる図13(A)に示した右画像IR1、IR2は、プロセッサ装置14に伝送されて画像処理部102で表示用の画像データとして順次生成され、表示画像生成部104に取り込まれる。
表示画像生成部104では、画像処理部102により右画像1R1の画像データが得られたときには、その画像データを用いて図11(A)に示した基本の実施の形態における生成処理と同一の処理が行われて3D画像表示エリア160の右表示画像160DRが生成される。
一方、画像処理部102により右画像1R2の画像データが得られたときには、その右画像1R2の画像データが3D画像表示エリア160の右表示画像160DRの画像データとされ、右画像IR2がそのまま右表示画像160DRとなる。
そして、このような生成処理が画像処理部102により右画像1R1又は右画像IR2の画像データが得られるごとに繰り返される。
左表示画像についても同様に、左画像IL1の画像データが得られたときには図11(B)に示した基本の実施の形態における生成処理と同一の処理により左表示画像160DLが生成され、左画像1L2の画像データが得られたときには、その左画像1L2が左表示画像160DLとなる。
このようにして順次生成される右表示画像150DRと左表示画像150DLとが3D表示装置18の画面上における3D画像表示エリア160に表示されることによって、3D画像として表示される3D画像表示エリア160の画像(3D視野範囲3DR&3DLの画像)が右画像1R1と右画像IR2の取り込みごと(左画像1L1と左画像1L2の取り込みごと)に更新される。なお、この3D画像表示エリア160での3D画像の表示は、これと別のエリアに表示される広角2D画像表示エリア170での2D画像の表示と共に、又は切り替えて行われるものであり、2D画像のフレームレートとの比較については後述する。
次に、図7及び図8(B)における広角2D画像表示エリア170の右表示画像及び左表示画像を生成する場合の処理について説明する。なお、右表示画像と左表示画像は同様の処理により同一画像として生成されるため、ここでは右表示画像の生成処理についてのみ詳説する。
上述のように右撮影部50Rにより順次取り込まれる図13(A)に示した右画像IR1、IR2は、プロセッサ装置14に伝送されて画像処理部102で表示用の画像データとして順次生成され、表示画像生成部104に取り込まれる。
表示画像生成部104では、画像処理部102により右画像1R1の画像データが得られたときには、その画像データを用いて図12(A)に示した基本の実施の形態における生成処理と同一の処理が行われて広角2D画像表示エリア170の右表示画像170DRが生成される。そして、その右表示画像170DRが最新のものとされる。なお、図12(A)のように右表示画像170DRの生成には、左画像IL1の画像データも使用される。
一方、画像処理部102により右画像1R2の画像データが得られたときには、図16(A)に示すように、表示画像生成部104により既に生成された最新の右表示画像170DRに対して3D視野範囲3DR&3DLの画像の画像データのみが、その右画像IR2の画像データで置き換えられる。これによって3D視野範囲3DR&3DLの画像のみが更新された新たな右表示画像170DRが生成され、その右表示画像150DRが最新のものとされる。
そして、このような生成処理が画像処理部102により右画像1R1又は右画像IR2の画像データが得られるごとに繰り返される。
なお、右表示画像170DRは、右画像1R1の画像データが得られたときのみ更新するものとし、右画像IR2の画像データが得られてときに右表示画像170DRには変更を加えないものとしてもよい。
左表示画像については、右表示画像170DRと同一の処理により右表示画像170DRと同一の左表示画像170DLが生成される。
このようにして順次生成される表示画像170DRと左表示画像170DLとが3D表示装置18の画面上における広角2D画像表示エリア170に表示されることによって、広角2D画像表示エリア170の全範囲における画像が広画角範囲の2D画像として表示される。このとき、少なくとも広角2D画像表示エリア170の右2D視野範囲2DRと左2D視野範囲2DLの画像は、右画像IR1(左画像1L1)の取り込みごとに更新される。したがって、上記の3D画像として表示される3D画像表示エリア160の画像のフレームレートの方が、2D画像として表示される広角2D画像表示エリア170の画像のフレームレートよりも高くなる。
次に上記変形例1において右画像IRと左画像ILを取り込むための構成とフレームレートの変更について説明する。
図17は、内視鏡12の右撮影部50R及びプロセッサ装置14における右画像IRの取り込みに関する構成について示したブロック図である。左撮影部50L及びプロセッサ装置14における左画像ILの取り込みに関する構成及び作用については右画像IRの取り込みに関する構成と同様であるため説明を省略する。
同図に示すように、右撮影部50Rには、駆動部200R(取込み周期設定手段)が具備されており、この駆動部200Rによってイメージセンサ70Rが制御され、イメージセンサ70Rの各画素での電荷蓄積の開始や、各画素に蓄積された電荷(画素データ)の読出しが行われ、また、受光面上の特定の位置又は領域の画素に限定した画素データの読出しなどが行われるようになっている。
なお、特定の位置又は領域の画素に限定した画素データの読出しは、イメージセンサ70Rから全画素分の画素データを読み出した後、右撮影部50R内の所定の処理部202Rにより、特定の位置又は領域の画素の画素データのみを抽出することによって同等の処理を行うようにしてもよい。この処理部202Rは、図3におけるAFE80Rの前段、又は後段のいずれに設けられたものでもよいし、AFE80R内に包含されるものであってもよい。
このように構成された右撮影部50Rによれば、図13(A)、図14(A)のように右全視野範囲VFRの全体画像からなる右画像IR1と、3D画像の表示に使用される右3D視野範囲3DRのみの画像からなる右画像IR2とを取り込むことができる。即ち、イメージセンサ70Rの受光面上において、3D画像の表示に使用される右3D視野範囲3DRの画像を撮像する領域の各画素から画素データを取り込むサンプリングレートを、2D画像の表示のみに使用される右2D視野範囲2DRの画像を撮像する領域の各画素から画素データを取り込むサンプリングレートよりも高くし、右3D視野範囲3DRの画像のフレームレート(3D動画のフレームレート)を右2D視野範囲2DRの画像のフレームレート(2D動画のフレームレート)よりも高くすることができる。
駆動部200Rには、プロセッサ装置14の制御部210(取込み周期設定手段)が接続されており、制御部210から駆動部200Rへの駆動信号が与えられ、その駆動信号に従って駆動部200Rにより上記のようなイメージセンサ70Rの制御が行われるようになっている。
プロセッサ装置14には、制御部210の他に重要度判断部(重要度設定手段)212、入力部(指定手段)214、動き検出部(動き検出手段)216が具備されている。
重要度判断部212は、入力部214又は動き検出部216から与えられた情報に基づいて、3D画像の重要度(2D画像に対する重要度)が判断される。
重要度は、多段階的に評価され、例えば、0、1、2の値に設定される。その重要度を示す値が高い程、3D画像の重要度が高いものとする。ただし、重要か重要でないかの2段階の評価(重要度0、1)としても良いし、3段階よりも大きな階数によって評価してもよい。
入力部214は、図1等では不図示のキーボードやマウス等の入力装置をプロセッサ装置14の一部として示したものである。重要度を手動設定する場合には、その入力部214によりユーザが3D画像の重要度を指定することによって、重要度判断部212における重要度が設定される。なお、3D画像の重要度の指定は、重要度を示す数値を入力する形態や、事前に決められた複数種の重要度の中から所望の重要度を選択する形態など、どのような方法であってもよい。また、内視鏡12の操作部22に設けられた操作部材によってユーザが重要度を指定できるようにしてもよい。
動き検出部216は、右撮影部50Rにより順次取り込まれた右画像IRの撮像信号や画像データ(例えば、図3の画像処理部102により生成された画像データ)を取り込み、異なる時刻の2フレーム間の画像変化に基づいて、撮影部50R、50L(内視鏡12の先端部30)の動きの速度(速さ)を検出する。そして、検出した結果を重要度判断部212に与える。この動き検出部216による動き検出は左撮影部50Lにより取り込まれた左画像ILにより行われるようにしてもよいし、内視鏡12の先端部30に配置した動きセンサ(加速度センサ等)からの検出信号に基づいて行われるようにしてもよい。
重要度判断部212は、3D画像の重要度を自動設定する場合には、動き検出部216から与えられた情報に基づいて3D画像の重要度を設定する。例えば、動き検出部216により検出された動きの速度が遅いほど、3D画像の重要度が高くなるように設定すると好適である。即ち、撮影部50R、50Lの動きが速いほど、特定の部位を注視している状態ではないと考えられるため、3D画像の重要度が低いと考えられる。したがって、本変形例1では動き検出部216により検出された動きの速度が遅いほど、3D画像の重要度が高くなるように設定する。
なお、重要度の手動設定と自動設定とは入力部214等からユーザによって入力されるモードの選択によって切り替えられるようにしても良いし、いずれか一方のみによって重要度が設定されるようにしてもよい。
制御部210は、重要度判断部212から与えられる3D画像の重要度に基づいて、図13(A)、図14(A)に示した右全視野範囲VFRの全体画像からなる右画像IR1と、3D画像の表示に使用される右3D視野範囲3DRのみの画像からなる右画像IR2とを取り込む割合と、右画像IRのフレームレートを決定する。そして、その決定した割合とフレームレートにしたがった右画像IRの取り込みが、イメージセンサ70Rによって実施されるように右撮影部50Rの駆動部200Rに駆動信号を与える。
ここで、制御部210は、3D画像の重要度が高い程、右画像IR1に対する右画像IR2の取り込みの割合を大きくする。そして、これによって、2D画像の表示にのみ使用される右2D視野範囲2DRの画像の取り込みの割合が減少して2D画像のデータに対するシステムの処理負担が軽減した分、3D画像(右3D視野範囲3DRの画像)の取込み周期を短くする。
例えば、図18(A)に示すように基本の実施の形態の右撮影部50Rにおいて、本変形例1の右画像IR1に相当する右画像IRをイメージセンサ70Rから読み出す周期(右画像IRを取り込む周期)をTR1とすると、右画像IRのフレームレートは1/TR1となる。そして、3D画像(右3D視野範囲3DRの画像)及び2D画像(右2D視野範囲2DRの画像)のフレームレートも1/TR1となる。
これに対して本変形例1において、3D画像の重要度が0の場合には、同図(B)に示すように右画像IRとして右画像IR1と右画像IR2を1:1の割合で取り込むものとする。
このとき、右画像IRのフレームレートは1/(TR1+TR2)となる。また、3D画像を形成する右3D視野範囲3DRの画像の取込み所要時間は、右3D視野範囲3DR領域を含む右画像IR1の取込みに要する時間と、右3D視野範囲3DRのみの画像からなる右画像IR2の取込みに要する時間との和になるので、3D画像(右3D視野範囲3DRの画像)の平均取込み周期は、(TR1+TR2)/2となる。(3DRを2枚分取込むのに時間がかかるから)。一方、2D画像を形成する右2D視野範囲2DRの画像の取込み周期は(TR1+TR2)となる。
そして、3D画像のフレームレートは、2/(TR1+TR2)となり、2D画像のフレームレートは、1/(TR1+TR2)となる。
したがって、3D画像の平均フレームレートを2D画像のフレームレートよりも2倍高くすることができる。
また、右画像IR2よりもデータ量の多い右画像IR1の取り込みの割合が減少したため、基本の実施の形態の3D画像のフレームレート1/TR1と比較して、3D画像のフレームレート2/(TR1+TR2)をより高く((TR1+TR2)/2<TR1)することができる。
即ち、右3D視野範囲3DRのみの画像からなる右画像IR2の取込みに要する時間TR2を、基本の実施の形態の右画像IR1の取込みに要する時間TR1よりも短くした分、3D画像を形成する右3D視野範囲3DRの画像の取込み周期(TR1+TR2)/2を基本の実施の形態でのその取込み周期TR1よりも短くしている。
したがって、基本の実施の形態と比較して3D画像の高品質化(3D動画の円滑化)が図られている。なお、3D画像の重要度が0の場合には、基本の実施の形態と同様の右画像IRの取り込みとしてもよい。
3D画像の重要度が1の場合には、同図(C)に示すように右画像IRとして右画像IR1と右画像IR2を1:2の割合で取り込むものとする。このとき、右画像IRのフレームレートは1/(TR1+2・TR2)となる。また、3D画像の形成する右3D視野範囲3DRの画像の平均取込み周期は(TR1+2・TR2)/3、2D画像を形成する右2D視野範囲2DRの画像の取込み周期は(TR1+2・TR2)となる。
そして、3D画像の平均フレームレートは3/(TR1+2・TR2)となり、2D画像のフレームレートは、1/(TR1+2・TR2)となる。
したがって、3D画像の平均フレームレートの方が2D画像のフレームレートよりも3倍高い。
また、重要度0の場合と比較して右画像IR2よりもデータ量の多い右画像IR1の取り込みの割合が減少したため、重要度0のときの3D画像のフレームレート2/(TR1+TR2)と比較して重要度1のときの3D画像のフレームレート3/(TR1+2・TR2)を更に高く((TR1+2・TR2)/3<(TR1+TR2)/2)することができる。
即ち、右3D視野範囲3DRのみの画像からなる右画像IR2の取込みに要する時間TR2を、基本の実施の形態の右画像IR1の取込みに要する時間TR1よりも短くした分、3D画像を形成する右3D視野範囲3DRの画像の取込み周期(TR1+2・TR2)/3を重要度0の場合のその取込み周期(TR1+TR2)/2よりも短くしている。
したがって、重要度0の場合と比較して3D画像の高品質化(3D動画の円滑化)が図られている。
3D画像の重要度が2の場合には、同図(D)に示すように右画像IRとして右画像IR1と右画像IR2を1:3の割合で取り込むものとする。このとき、右画像IRのフレームレートは1/(TR1+3・TR2)となる。また、3D画像の形成する右3D視野範囲3DRの画像の平均取込み周期は、(TR1+3・TR2)/4、2D画像を形成する右2D視野範囲2DRの画像の取込み周期は(TR1+3・TR2)となる。
そして、3D画像の平均フレームレートは、4/(TR1+3・TR2)となり、2D画像のフレームレートは、1/(TR1+3・TR2)となる。
したがって、3D画像の平均フレームレートの方が2D画像のフレームレートよりも4倍高い。
また、重要度1の場合と比較して右画像IR2よりもデータ量の多い右画像IR1の取り込みの割合が減少したため、重要度1のときの3D画像のフレームレート3/(TR1+2・TR2)と比較して重要度2のときの3D画像のフレームレートを更に高く((TR1+3・TR2)/4<(TR1+2・TR2)/3)することができる。
即ち、右3D視野範囲3DRのみの画像からなる右画像IR2の取込みに要する時間TR2を、基本の実施の形態の右画像IR1の取込みに要する時間TR1よりも短くした分、3D画像を形成する右3D視野範囲3DRの画像の取込み周期(TR1+3・TR2)/4を重要度1の場合のその取込み周期(TR1+2・TR2)/3よりも短くしている。
したがって、重要度1の場合と比較して3D画像の高品質化(3D動画の円滑化)が図られている。
このように3D画像の重要度が高いほど、右画像IR1よりも右画像IR2を取り込む割合を大きくし、かつ、3D画像(右3D視野範囲3DRの画像)のフレームレートを高くすることによって、3D画像の重要度が高いほど、高品質な3D画像(円滑な3D動画)が得られるようになる。
なお、重要度に応じた右画像IR1と右画像IR2の取込みの割合は上述の場合に限らない。また、左撮影部50Lにおける左画像ILの取り込みに関しても上述の右撮影部50Rの右画像IRの取り込みと全く同様にして行われる。
また、図17においてプロセッサ装置14が備えた各構成部210〜216の一部又は全てを内視鏡12が備えてもよく、内視鏡12において上述の各構成部210〜216の一部又は全ての処理を行うようにしてもよい。
図19は上記変形例1における右画像IR及び左画像ILの取り込みに関する処理手順を示したフローチャートである。
まず、ステップS10では、プロセッサ装置14の制御部210が内視鏡12の右撮影部50Rの駆動部200R(及びこれに対応する左撮影部50Lの不図示の駆動部)に駆動信号を与えることによって、右画像IR及び左画像ILを取り込みが開始される。このとき、右画像IR1と右画像IR2を取り込む割合と、左画像IL1と左画像IL2を取り込む割合とを事前に決められた基準の割合(例えば1:1)に設定され、また、右画像IRと左画像ILのフレームレートが事前に決められた基準のフレームレートに設定される。ステップS10の後、ステップS12に移行する。
ステップS12では、重要度判断部212により、重要度の設定に関して自動設定モードに設定されているか手動設定モードに設定されているかが判断される。この設定モードはユーザの入力部214に対する操作によってユーザが選択することができる。本ステップS12により自動設定モードに設定されていると判断された場合には、ステップS14に移行し、手動設定モードに設定されていると判断された場合には、ステップS18に移行する。
ステップS14では、動き検出部216により、例えば右撮影部50Rにより順次取り込まれた右画像IRの画像データに基づいて撮影部50R、50Lの動きの速度が検出される。本検出は、左撮影部50Lにより順次取り込まれた左画像ILの画像データを用いてもよい。本ステップS14の後、ステップS16に移行する。
ステップS16では、動き検出部216の検出結果が重要度判断部212に与えられ、重要度判断部212により撮影部50R、50Lの動きの速度に応じた3D画像の重要度が設定される。本ステップS16の後、ステップS20に移行する。
ステップS12において手動設定モードに設定されていると判断された場合のステップS18では、ユーザによって入力部214から入力された3D画像の重要度に関する情報が重要度判断部212に与えられ、その情報に従って3D画像の重要度が重要度判断部212により設定される。ステップS12の後、ステップS20に移行する。
ステップS20では、重要度判断部212により設定された3D画像の重要度に関する情報が制御部210に与えられ、制御部210により、3D画像の重要度に応じた取り込み割合とフレームレートが決定される。取り込み割合は、右画像IRとして取り込まれる右画像IR1と右画像IR2とを取り込む割合と、左画像ILとして取り込まれる左画像IL1と左画像IL2とを取り込む割合を示し、これらは等しい値に設定される。また、フレームレートは、フレーム画像として取り込まれる右画像IRの右画像IR1と右画像IR2が単位時間当りに取り込まれるフレーム数と、フレーム画像として取り込まれる左画像ILの左画像IL1と左画像IL2が単位時間当りに取り込まれるフレーム数を示し、これらは等しい値に設定される。本ステップS20の後、ステップS22に移行する。
ステップS22では、制御部210から右撮影部50Rの駆動部200R(及びこれに対応する左撮影部50Lの不図示の駆動部)に駆動信号が与えられ、制御部210により設定された取り込み割合とフレームレートでの右画像IR及び左画像ILの取り込みが実施される。
以上のステップS22での処理が終了すると、ステップS12に戻る。これによって、ステップS12からステップS22までの処理が撮影の終了が指示されるまで繰り返される。
次に、変形例1の実施の形態に対して、3D画像の解像度が2D画像の解像度よりも高くなるようにし、2D画像に対する処理負担を軽減して3D画像のフレームレートや解像度をより高くできるようにした形態(変形例2及び変形例3の実施の形態)について説明する。
図20(A)、(B)は、変形例2及び変形例3の実施の形態において撮影部50R、50Lにより取り込まれる右画像IR1及び左画像IL1の画素構成を示したイメージ図である。
右画像IR1は、同図(A)に示すように、3D画像の表示に使用される右3D視野範囲3DRの画像の解像度よりも2D画像の表示に使用される右2D視野範囲2DRの画像の解像度の方が低くなるようにして取り込まれる。ここで、同図(A)、(B)において、白色の画素が右画像IRの画素データとして有効に取り込まれている画素を示し、黒色の画素が右画像IRの画素データとして有効に取り込まれていない画素を示す。
また、左画像ILは、同図(B)に示すように、3D画像の表示に使用される左3D視野範囲3DLの画像の解像度よりも2D画像の表示に使用される左2D視野範囲2DLの画像の解像度の方が低くなるようにして取り込まれる。
これにより、2D画像のデータ量を減らすことができ、その分、3D画像のフレームレートや解像度を高くすることができ、3D画像の高品質化を図ることができる。
このような右画像IR1と左画像IL1の取り込みは、図17に示した右撮影部50Rの駆動部200R、及び、これに対応する左撮影部50Lの不図示の駆動部によってイメージセンサ70R、70Lから画素データを読み出す画素を右2D視野範囲2DRと左2D視野範囲2DLの領域に対して低減させることによって行うことができる。画素データを読み出す画素(画素数)の低減は、右2D視野範囲2DRと左2D視野範囲2DLの画像を撮像する受光面上の領域の全画素に対して、離間的な位置に配置された画素のみから画素データを読み出す間引き処理、又は、互いに近接する複数の画素データから1画素分の画素データを生成して読み出すビニング処理に相当する画素データの読み出しによって実現することができる。
また、イメージセンサ70R、70Lからの画素データの読み出しにおいてではなく、イメージセンサ70R、70Lから全画素分の画素データが読み出された後、図17に示した右撮影部50Rの処理部202R、及び、これに対応する左撮影部50Lの不図示の処理部によって、右2D視野範囲2DRと左2D視野範囲2DLの領域の画素(画素数)を低減させることもできる。この低減は、上記の間引き処理やビニング処理によって実現することができる。
図21は、図20(A)、(B)のように右画像IR1と左画像IL1を取り込むための変形例3におけるイメージセンサ70R、70Lの受光面における画素ピッチ(画素密度)を示す。
イメージセンサ70R、70Lの受光面(受光部)において、右画像IRの右3D視野範囲3DRの画像を撮像する領域230Rと、左画像ILの左3D視野範囲3DLの画像を撮像する領域230Lの画素ピッチは一致している。拡大図234は、それらの領域230R、230L内の同一面積の範囲を拡大して示した図である。拡大図234に示すように領域230R、230L内の画素(受光素子)238、238、・・・は、例えば縦方向と横方向に同一の画素ピッチP1で配列されている。
一方、イメージセンサ70R、70Lの受光面において、右画像IRの右2D視野範囲2DRの画像を撮像する領域232Rと、左画像ILの左2D視野範囲2DLの画像を撮像する領域232Lの画素ピッチは一致している。拡大図236は、それらの領域232R、232L内の同一面積の範囲を拡大して示した図である。拡大図236に示すように領域232R、232L内の画素(受光素子)240、240、・・・は、例えば縦方向と横方向に同一の画素ピッチP2で配列されている。
そして、領域230R、230L内の画素ピッチP1と、領域232R、232Lの画素ピッチP2を比較すると、画素ピッチP1よりも画素ピッチP2の方が大きい。即ち、領域230R、230Lの画素密度の方が、領域232R、232Lの画素密度よりも大きい。
このようにイメージセンサ70R、70Lとして、3D画像を撮像する受光面の領域よりも2D画像を撮像する受光面の領域の方が画素ピッチが大きいイメージセンサを使用することによって、図20(A)のように3D画像の表示に使用される右3D視野範囲3DRの画像の解像度よりも2D画像の表示に使用される右2D視野範囲2DRの画像の解像度の方が低い右画像IRが右撮影部50Rにより取り込まれるようになる。また、図20(B)のように3D画像の表示に使用される左3D視野範囲3DLの画像の解像度よりも2D画像の表示に使用される左2D視野範囲2DLの画像の解像度の方が低い左画像ILが左撮影部50Lにより取り込まれるようになる。
以上のような変形例2、3の右画像IR1と左画像IL1の取り込みを変形例1における右画像IR1と左画像IL1の取り込みに対して適用した場合において、内視鏡画像の表示エリアの右表示画像と左表示画像は、変形例1において説明した表示エリアの種類に応じた生成処理と同一処理によって生成し、3D表示装置18に表示することができる。
なお、変形例2、3のように右画像IR1と左画像1L1の取り込みにおいて、2D画像の表示に使用される右2D視野範囲2DRと左2D視野範囲2DLの画像の解像度を低減させるだけでなく、3D画像の表示に使用される画像の解像度、即ち、右画像IR1と左画像1L1の全範囲の解像度を変形例2と同様に間引き処理やビニング処理等によって低減するようにしてもよい。
これによれば、右画像IR1と左画像IL1のデータ量を変形例2、3よりも少なくできるため、その分、右画像IRと左画像ILのフレームレートを高くすることができる。
この場合において、内視鏡画像の表示エリアの右表示画像と左表示画像の生成は、変形例1の実施の形態において説明した表示エリアの種類に応じた生成処理と同一処理によって生成し、3D表示装置18に表示することができる。
ただし、図6における3D画像&広角2D画像表示エリア150の右表示画像及び左表示画像の生成において、図9(A)、(B)に示した3D画像&広角2D画像表示エリア150における3D視野範囲3DR&3DLの領域150Mの画像は解像度の高い右画像IR2、左画像IL2のみによって更新されるようにしてもよい。
また、図7及び図8(A)における3D画像表示エリア160の右表示画像及び左表示画像の生成において、図11(A)、(B)に示した3D画像表示エリア160の画像は、解像度の高い右画像IR2、左画像IL2のみによって更新されるようにしてもよい。
一方、図7及び図8(B)における広角2D画像表示エリア170の右表示画像及び左表示画像の生成において、図12(A)、(B)に示した広角2D画像表示エリア170における3D視野範囲3DR&3DLの領域170Mの画像は解像度の低い右画像IR1、左画像IL1のみによって更新されるようにしてもよい。
すなわち、3D画像は、解像度の高い右画像IR2、左画像IL2によって生成して表示し、広角2D画像は、解像度の低い右画像IR1、左画像IL1によって生成し表示するようにしてもよい。この場合に、広角2D画像の3D視野範囲3DR&3DLの画像は、右画像IR1と左画像IL1のいずれか一方の画像から生成すれば良く、他方の画像において3D視野範囲3DR&3DLの画像を取り込むことも不要となる。
また、広角2D画像の3D視野範囲3DR&3DLの画像を解像度の高い右画像IR2又は左画像IL2によって生成することも可能であり、その場合には、右画像IR1と左画像IL1の両方において3D視野範囲3DR&3DLの画像を取り込むことが不要となる。即ち、右画像IR1として、右2D視野範囲2DRのみの低解像度の画像を取り込み、左画像1L1として、左2D視野範囲2DLのみの低解像度の画像を取り込む形態となる。