JP5857466B2 - 流体輸送装置 - Google Patents
流体輸送装置 Download PDFInfo
- Publication number
- JP5857466B2 JP5857466B2 JP2011136017A JP2011136017A JP5857466B2 JP 5857466 B2 JP5857466 B2 JP 5857466B2 JP 2011136017 A JP2011136017 A JP 2011136017A JP 2011136017 A JP2011136017 A JP 2011136017A JP 5857466 B2 JP5857466 B2 JP 5857466B2
- Authority
- JP
- Japan
- Prior art keywords
- pressing
- tube
- fluid
- transport device
- rotary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Reciprocating Pumps (AREA)
Description
弾性を有し、流体の流路を形成するチューブと、
前記流路が円弧状になるように前記チューブを案内する枠体と、
前記円弧の中心を回転軸として回転する回転押圧板と、
前記流路に沿って配置された複数の押圧体であって、それぞれ、前記回転軸の軸方向に前記チューブと重なるように設けられた複数の押圧体と、
を備え、
前記回転押圧板が回転する際に、前記回転押圧板が前記複数の押圧体を順次前記軸方向に押圧し、各押圧体が前記チューブを前記軸方向に押圧することによって、流体を流入側から流出側に輸送する、
ことを特徴とする流体輸送装置である。
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
弾性を有し、流体の流路を形成するチューブと、
前記流路が円弧状になるように前記チューブを案内する枠体と、
前記円弧の中心を回転軸として回転する回転押圧板と、
前記流路に沿って配置された複数の押圧体であって、それぞれ、前記回転軸の軸方向に前記チューブと重なるように設けられた複数の押圧体と、
を備え、
前記回転押圧板が回転する際に、前記回転押圧板が前記複数の押圧体を順次前記軸方向に押圧し、各押圧体が前記チューブを前記軸方向に押圧することによって、流体を流入側から流出側に輸送する、
ことを特徴とする流体輸送装置。
このような流体輸送装置によれば、押圧部を放射状に設ける場合と比べて平面サイズを小さくすることができる。これにより装置の小型化を図ることができる。
このような流体輸送装置によれば、流体を連続的に且つ安定して流動させることができる。
このような流体輸送装置によれば、回転押圧板を回転することで、それぞれの領域を移動させることができ、これに基づいてチューブの流体を流動させることができる。
このような流体輸送装置によれば、より安定して流体を流動させることができる。
このような流体輸送装置によれば、突起部と押圧体とが当接する際のエネルギーの損失を低減することができる。
≪全体構成について≫
図1は、本実施形態の流体輸送装置を用いた流体輸送器の外観を示す斜視図である。図1において、流体輸送器10は、流体を蠕動運動によって輸送する流体輸送装置20と、流体を収容するパック状の流体収容容器90と、から構成されている。そして、流体輸送装置20と流体収容容器90とは、チューブ80によって連通されている。
流体収容容器90は、可撓性を有する合成樹脂からなり、本実施形態においては、シリコン系樹脂によって形成されている。流体収容容器90の一方の端部にはチューブ保持部92が設けられ、チューブ80が圧着または熱溶着または接着等の手段で、流体が漏洩しないように密閉固定されている。
なお、本発明で使用される流体としては、水や食塩水、薬液、油類、芳香液、インク等流動性がある液体の他、気体が含まれる。
流体輸送装置20は、下蓋82、ポンプユニット枠31、チューブ枠32、上蓋81を順次重ねて、それらを固定螺子95(図は、上蓋固定螺子を示す)等によって一体化されている。この流体輸送装置20の内部に流体を輸送するための回転押出機構が格納されている。
なお、下蓋82、ポンプユニット枠31、チューブ枠32、上蓋81及び流体収容容器90は、流体輸送器10を生体に装着する場合においては、生体整合性の優れた材料、例えば、ポリスルホン、ウレタン等の合成樹脂を採用することが好ましい。
続いて、流体を輸送するための機構について図面を参照して説明する。
図2は、本実施形態に係る流体輸送装置の流体を輸送するための機構を示す平面図であり、図3は、図2のA−A断面を示す断面図である。なお、図2は、説明を分かりやすくするために上蓋81を透視した状態を示している。図2、図3において、流体輸送装置20は、基本構成としてチューブ80に蠕動運動を与え、流体を輸送する回転押出機構としてのポンプユニット30と、ポンプユニット30を駆動するためのポンプ駆動ユニット60と、から構成されている。ポンプユニット30とポンプ駆動ユニット60とは、断面方向に重ねて構成されている(図3参照)。
まず、ポンプ駆動ユニット60の構造及び駆動について説明する。図3において、ポンプ駆動ユニット60は、板状の第1基板61と、第2基板62と、第3基板63とを備え、それぞれの基板の間の空間に、駆動力をポンプユニット30に与えるモーターと伝達輪列、及び駆動制御のための駆動回路(共に、図示せず)とが備えられている。
次に、ポンプユニット30の構造について説明する。図2、図3において、ポンプユニット30は、基本構成として、ポンプ駆動ユニット60から伝達される回転力によって回転される回転板車56と、回転板車56と一体で回転する回転押圧板50と、8本の押圧体41〜48と、流体を流動するチューブ80と、チューブ枠32及びスライド枠34が備えられている。なお、以下の説明において、回転押圧板50の回転の回転軸の方向(以下、軸方向ともいう)について、上蓋81側を上側とし、下蓋82側を下側とする。ここで、軸方向とは、回転押圧板50の中心軸(回転軸)に平行な方向、あるいは、回転押圧板50の面に垂直な方向(法線方向)のことである。
続いて、本実施形態における流体の輸送動作にについて図6A〜図6Dを参照して説明する。図6A〜図6Dは本実施形態における流体輸送装置の輸送動作の説明図である。
第2実施形態では回転押圧板の構成が第1実施形態と異なる。なお、回転押圧板以外の構成は第1実施形態と同様であるため図示及び説明を省略する。
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。
前述した実施形態の流体輸送装置は、様々な機械装置の装置内、または装置外に適用することができ、水や食塩水、薬液、油類、芳香液、インク、気体等の流体の輸送に利用することができる。また、前述した実施形態の流体輸送装置は、流体の流量を精度良く管理できるので、流体収容容器内に薬剤等を収容して生体内に植え込むことができ、新薬の開発や治療等に採用するのに適している。
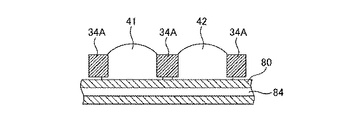
前述した実施形態では、押圧体は8個(押圧体41〜48)であったが、これには限られず複数であればよい。また、前述した実施形態では、押圧体41〜48の上端部分の形状は曲面であったが、これ以外の形状でもよい。例えば、流路方向の上流側が傾斜面になっていてもよい。
前述した実施形態では、押圧体を押圧する部分は90度間隔で4つ(押圧部50a〜50d、突出部51〜54)であったが、これには限られず、例えば3つでもよいし、5つ以上であってもよい。
30 ポンプユニット、31 ポンプユニット枠、
32 チューブ枠、34 スライド枠、34A スペーサー、
41〜48 押圧体、
50 回転押圧板、50a〜50d 押圧部、
51〜54 突出部、56 回転板車、57 軸受、
60 ポンプ駆動ユニット、61 第1基板、61A 支軸、
62 第2基板、63 第3基板、
70 コイルブロック、71 伝達一番車、72 伝達二番車軸、
73 伝達三番車、74 伝達四番車、75 伝達五番車、77 軸受、
80 チューブ、81 上蓋、82 下蓋、84 流路
90 流体収容容器、92 チューブ保持部
Claims (10)
- 弾性を有し、流体の流路を形成するチューブと、
前記流路が円弧状になるように前記チューブを案内する枠体と、
前記流路に沿って配置されて、それぞれ、前記回転軸の軸方向に前記チューブと重なるように設けられた複数の押圧体と、
前記円弧の中心を回転軸として回転し、前記複数の押圧体と対向する側の面に、前記押圧体を押圧して前記チューブを閉塞するための突起部を複数有する、回転押圧板と、
を備え、
前記突起部は、前記複数の押圧体と当接する部分が滑らかな剛体で形成され、前記回転押圧板との境界部分が弾性体で形成され、
前記押圧体が前記チューブを前記軸方向に押圧することによって、前記流体を流入側から流出側に輸送する、ことを特徴とする流体輸送装置。 - 請求項1に記載の流体輸送装置であって、
前記複数の押圧体の少なくとも一つが前記チューブを閉塞していることを特徴とする流体輸送装置。 - 請求項1又は2に記載の流体輸送装置であって、
前記回転押圧板は、前記押圧体を押圧して前記チューブを閉塞する領域と、前記チューブを押圧から開放する領域とを有することを特徴とする流体輸送装置。 - 請求項1〜3の何れかに記載の流体輸送装置であって、
前記複数の押圧体は、前記回転押圧板と当接する部分が滑らかな剛体で形成され、前記チューブと接触する部分が弾性体で形成されていることを特徴とする流体輸送装置。 - 弾性を有し、流体の流路を形成するチューブと、
前記流路が円弧状になるように前記チューブを案内する枠体と、
前記流路に沿って配置されて、それぞれ、前記回転軸の軸方向に前記チューブと重なるように設けられた複数の押圧体と、
前記複数の押圧体を押圧する押圧部を有して、前記円弧の中心を回転軸として回転する回転押圧板と、
を備え、
前記押圧部の端面において前記押圧回転板が回転する軸方向の下側が面取りされ、
前記押圧体が前記チューブを前記軸方向に押圧することによって、前記流体を流入側から流出側に輸送する、ことを特徴とする流体輸送装置。 - 請求項5に記載の流体輸送装置であって、
前記複数の押圧体の少なくとも一つが前記チューブを閉塞していることを特徴とする流体輸送装置。 - 請求項5又は6に記載の流体輸送装置であって、
前記回転押圧板は、前記押圧体を押圧して前記チューブを閉塞する領域と、前記チューブを押圧から開放する領域とを有することを特徴とする流体輸送装置。 - 請求項5又は6に記載の流体輸送装置であって、
前記回転押圧板は、前記複数の押圧体と対向する側の面に、前記押圧体を押圧して前記チューブを閉塞するための突起部を複数有することを特徴とする流体輸送装置。 - 請求項8に記載の流体輸送装置であって、
前記突起部は、前記複数の押圧体と当接する部分が滑らかな剛体で形成され、前記回転押圧板との境界部分が弾性体で形成されている、ことを特徴とする流体輸送装置。 - 請求項5〜9の何れかに記載の流体輸送装置であって、
前記複数の押圧体は、前記回転押圧板と当接する部分が滑らかな剛体で形成され、前記チューブと接触する部分が弾性体で形成されていることを特徴とする流体輸送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011136017A JP5857466B2 (ja) | 2011-06-20 | 2011-06-20 | 流体輸送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011136017A JP5857466B2 (ja) | 2011-06-20 | 2011-06-20 | 流体輸送装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013002405A JP2013002405A (ja) | 2013-01-07 |
| JP2013002405A5 JP2013002405A5 (ja) | 2014-07-31 |
| JP5857466B2 true JP5857466B2 (ja) | 2016-02-10 |
Family
ID=47671229
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011136017A Expired - Fee Related JP5857466B2 (ja) | 2011-06-20 | 2011-06-20 | 流体輸送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5857466B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111946625B (zh) * | 2020-07-16 | 2022-06-21 | 福建元华泵业有限公司 | 一种免加水启动的自吸泵 |
| CN111946626A (zh) * | 2020-07-16 | 2020-11-17 | 福建元华泵业有限公司 | 一种直接启动抽水的自吸泵 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5444209A (en) * | 1977-09-14 | 1979-04-07 | Nitsukisou Eikopu Kk | Improvement of tube pump |
| US7556481B2 (en) * | 2005-08-26 | 2009-07-07 | Baxter International Inc. | Rotary axial peristaltic pumps and related methods |
| JP4946974B2 (ja) * | 2008-05-27 | 2012-06-06 | セイコーエプソン株式会社 | 流体輸送装置及び流体輸送器 |
-
2011
- 2011-06-20 JP JP2011136017A patent/JP5857466B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013002405A (ja) | 2013-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9309880B2 (en) | Fluid transporting device of the peristaltic type with a push pin and push plate arrangement | |
| US8100675B2 (en) | Fluid transporting device, and fluid transporter | |
| JP3992058B2 (ja) | 流体輸送装置 | |
| US8491286B2 (en) | Tube unit, control unit, and micropump | |
| WO2006080480A1 (ja) | 流体輸送装置及び流体輸送器 | |
| CN102330664B (zh) | 流体输送装置 | |
| JP5857466B2 (ja) | 流体輸送装置 | |
| JP6204582B2 (ja) | マイクロ蠕動ポンプ | |
| JP4946974B2 (ja) | 流体輸送装置及び流体輸送器 | |
| JP2019190335A (ja) | 蠕動ポンプ | |
| JP5476682B2 (ja) | マイクロポンプ | |
| JP5986415B2 (ja) | チューブポンプ | |
| JP5920426B2 (ja) | 流体輸送装置 | |
| JP5895953B2 (ja) | マイクロポンプ | |
| JP2014105607A (ja) | チューブポンプ | |
| JP4165528B2 (ja) | 流体輸送装置及び流体輸送器 | |
| JP5509549B2 (ja) | チューブユニット、制御ユニット、マイクロポンプ | |
| JP6075420B2 (ja) | マイクロポンプ | |
| JP5790799B2 (ja) | チューブユニット、制御ユニット、マイクロポンプ | |
| JP2019090403A (ja) | チューブポンプ | |
| JP2014005791A (ja) | 流体輸送装置、交換ユニット、及び交換ユニットの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140617 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140617 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150407 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5857466 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |