JP5750836B2 - Fluid ejection device - Google Patents
Fluid ejection device Download PDFInfo
- Publication number
- JP5750836B2 JP5750836B2 JP2010121765A JP2010121765A JP5750836B2 JP 5750836 B2 JP5750836 B2 JP 5750836B2 JP 2010121765 A JP2010121765 A JP 2010121765A JP 2010121765 A JP2010121765 A JP 2010121765A JP 5750836 B2 JP5750836 B2 JP 5750836B2
- Authority
- JP
- Japan
- Prior art keywords
- wiping
- ink
- wiping operation
- ejection surface
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Ink Jet (AREA)
Description
本発明は、流体噴射装置に関する。 The present invention relates to a fluid ejecting apparatus.
流体噴射装置としてのインクジェット式記録ヘッド(以下、単に記録ヘッドという)では、ノズルから噴射される液滴の良好な吐出状態を維持又は回復するためのメンテナンス処理を定期的に行っている。その具体的なメンテナンス動作として、例えば、噴射によりノズル面に付着してしまったインク(流体)等をワイパで払拭することによってノズル面に付着した付着物を除去するワイピング動作などがある(例えば、特許文献1参照)。 In an ink jet recording head (hereinafter simply referred to as a recording head) as a fluid ejecting apparatus, a maintenance process for maintaining or recovering a good ejection state of droplets ejected from a nozzle is periodically performed. As a specific maintenance operation, for example, there is a wiping operation that removes the adhering matter adhering to the nozzle surface by wiping ink (fluid) etc. adhering to the nozzle surface by jetting with a wiper (for example, Patent Document 1).
しかしながら、上記構成において、噴射面に付着して固化したインクなどについては、ワイピング動作を行っても十分に除去することができない場合があった。 However, in the above configuration, there are cases where ink that adheres to the ejection surface and solidifies cannot be sufficiently removed even if the wiping operation is performed.
以上のような事情に鑑み、本発明は、噴射ヘッドの噴射面をより清浄にすることが可能な流体噴射装置を提供することを目的とする。 In view of the circumstances as described above, it is an object of the present invention to provide a fluid ejecting apparatus that can clean the ejection surface of the ejection head.
本発明に係る流体噴射装置は、液状媒体に機能材料が分散されている流体を噴射する噴射面を有する噴射ヘッドと、前記噴射面を払拭するワイピング部と、前記ワイピング部に前記噴射面の第一払拭動作を行わせると共に、前記第一払拭動作によって払拭された前記流体の前記液状媒体が、前記ワイピング部に付着した状態のまま、前記第一払拭動作と同一経路で前記ワイピング部に前記噴射面の第二払拭動作を行わせる制御部と、前記噴射面を覆い、前記噴射面との間の空間を吸引して前記流体を排出させるキャッピング部と、を備え、前記制御部は、前記噴射ヘッドのクリーニング動作として、前記キャッピング部による前記噴射面の吸引動作を行わせると共に、当該吸引動作後に前記第一払拭動作及び前記第二払拭動作を行わせ、かつ前記制御部は、前記クリーニング動作の積算回数である累積回数と、予め設定された閾値である基準回数とに基づいて前記第二払拭動作の回数を算出することを特徴とする。 A fluid ejection device according to the present invention includes an ejection head having an ejection surface that ejects a fluid in which a functional material is dispersed in a liquid medium, a wiping unit that wipes the ejection surface, and a wiping unit that includes a first ejection surface. The wiping operation is performed, and the liquid medium of the fluid wiped by the first wiping operation is attached to the wiping unit, and is ejected to the wiping unit through the same path as the first wiping operation. A control unit that performs a second wiping operation on the surface, and a capping unit that covers the ejection surface and sucks a space between the ejection surface and discharges the fluid, and the control unit includes the ejection unit As a cleaning operation of the head, the suction surface is suctioned by the capping unit, the first wiping operation and the second wiping operation are performed after the suction operation, and Serial control unit, and calculates the cumulative number said a number of integrations cleaning operation, the number of the second wiping operation based on the preset threshold der Ru reference number.
本発明によれば、第一払拭動作及び第二払拭動作を行うことにより、噴射面に残留する機能材料が第一払拭動作によってワイピング部に付着した流体の液状媒体に再分散されるため、噴射面に残留する機能材料をより確実に払拭することができる。これにより、噴射ヘッドの噴射面をより清浄にすることができる。 According to the present invention, by performing the first wiping operation and the second wiping operation, the functional material remaining on the ejection surface is re-dispersed in the fluid liquid medium attached to the wiping portion by the first wiping operation. The functional material remaining on the surface can be wiped off more reliably. Thereby, the ejection surface of the ejection head can be made cleaner.
上記の流体噴射装置は、前記制御部は、前記第一払拭動作と前記第二払拭動作とを続けて行わせることを特徴とする。
本発明によれば、第一払拭動作と第二払拭動作とが続けて行われるため、第一払拭動作によってワイピング部に付着した流体に液状媒体がより多く含まれた状態で第二払拭動作が行われることになる。これにより、噴射面に残留する機能材料を確実に再分散させることができる。
In the fluid ejecting apparatus, the control unit continuously performs the first wiping operation and the second wiping operation.
According to the present invention, since the first wiping operation and the second wiping operation are continuously performed, the second wiping operation is performed in a state where more liquid medium is contained in the fluid attached to the wiping portion by the first wiping operation. Will be done. Thereby, the functional material remaining on the ejection surface can be reliably redispersed.
上記の流体噴射装置は、前記噴射面を覆い、前記噴射面との間の空間を吸引して前記流体を排出させるキャッピング部を更に備え、前記制御部は、前記噴射ヘッドのクリーニング動作として、前記キャッピング部による前記噴射面の吸引動作を行わせると共に、当該吸引動作後に前記第一払拭動作及び前記第二払拭動作を行わせることを特徴とする。
本発明によれば、噴射面を覆い、噴射面との間の空間を吸引して流体を排出させるキャッピング部を更に備える構成において、制御部が噴射ヘッドのクリーニング動作として、キャッピング部による噴射面の吸引動作を行わせると共に、当該吸引動作後に第一払拭動作及び第二払拭動作を行わせることとしたので、吸引動作によって流体が排出された後に第一払拭動作が行われることになる。これにより、ワイピング部に付着した流体に液状媒体がより多く含まれた状態で第二払拭動作が行われることになる。
The fluid ejecting apparatus further includes a capping unit that covers the ejecting surface, sucks a space between the ejecting surface and discharges the fluid, and the control unit performs the cleaning operation of the ejecting head as the cleaning operation. A suction operation of the ejection surface by a capping unit is performed, and the first wiping operation and the second wiping operation are performed after the suction operation.
According to the present invention, in the configuration further including the capping unit that covers the ejection surface and sucks the space between the ejection surface and discharges the fluid, the control unit performs the ejection head cleaning operation as the ejection head cleaning operation. Since the suction operation is performed and the first wiping operation and the second wiping operation are performed after the suction operation, the first wiping operation is performed after the fluid is discharged by the suction operation. As a result, the second wiping operation is performed in a state where the liquid adhering to the wiping portion contains more liquid medium.
上記の流体噴射装置は、前記制御部は、前記第二払拭動作の回数を設定し、当該設定結果に応じた回数分前記第二払拭動作を行わせることを特徴とする。
本発明によれば、制御部が第二払拭動作の回数を設定し、当該設定結果に応じた回数分第二払拭動作を行わせることとしたので、噴射面に残留した機能材料の残留状況に応じて最適な処理を行うことができる。
In the fluid ejecting apparatus, the control unit sets the number of times of the second wiping operation and causes the second wiping operation to be performed by the number of times corresponding to the setting result.
According to the present invention, the control unit sets the number of times of the second wiping operation, and the second wiping operation is performed for the number of times corresponding to the setting result. The optimum processing can be performed accordingly.
上記の流体噴射装置は、前記制御部は、前記クリーニング動作の積算回数に基づいて算出される基準回数に応じて前記第二払拭動作の回数を算出することを特徴とする。
本発明によれば、制御部がクリーニング動作の積算回数に基づいて算出される基準回数に応じて第二払拭動作の回数を算出することとしたので、噴射面に残留した機能材料の残留量に応じて最適な処理を行うことができる。
The fluid ejecting apparatus is characterized in that the control unit calculates the number of times of the second wiping operation according to a reference number of times calculated based on the cumulative number of times of the cleaning operation.
According to the present invention, since the control unit calculates the number of second wiping operations according to the reference number calculated based on the cumulative number of cleaning operations, the residual amount of the functional material remaining on the ejection surface is determined. The optimum processing can be performed accordingly.
上記の流体噴射装置は、前記噴射面を覆い、前記噴射面との間の空間を吸引して前記流体を排出させるキャッピング部を更に備え、前記制御部は、前記噴射ヘッドのクリーニング動作として、前記キャッピング部による前記噴射面の吸引動作を行わせると共に、当該吸引動作後に前記第一払拭動作及び前記第二払拭動作を行わせ、前記制御部は、前記第二払拭動作が直近に行われてからの経過時間に基づいて前記第二払拭動作の回数を算出することを特徴とする。
本発明によれば、クリーニング動作が直近に行われてからの経過時間に基づいて第二払拭動作の回数が算出されることとしたので、噴射面に残留した機能材料の乾燥状態に応じて最適な処理を行うことができる。
The fluid ejecting apparatus further includes a capping unit that covers the ejecting surface, sucks a space between the ejecting surface and discharges the fluid, and the control unit performs the cleaning operation of the ejecting head as the cleaning operation. A suction operation of the ejection surface by the capping unit is performed, and the first wiping operation and the second wiping operation are performed after the suction operation, and the control unit is configured to perform the second wiping operation most recently. The number of times of the second wiping operation is calculated based on the elapsed time.
According to the present invention, since the number of times of the second wiping operation is calculated based on the elapsed time since the cleaning operation was most recently performed, it is optimal according to the dry state of the functional material remaining on the ejection surface. Can be processed.
以下、図面を参照して、本発明の実施の形態を説明する。
図1は、本実施形態に係る印刷装置PRT(液体噴射装置)の概略構成を示す図である。本実施形態では、印刷装置PRTとして例えばインクジェット型の印刷装置を例に挙げて説明する。
Embodiments of the present invention will be described below with reference to the drawings.
FIG. 1 is a diagram illustrating a schematic configuration of a printing apparatus PRT (liquid ejecting apparatus) according to the present embodiment. In the present embodiment, for example, an ink jet type printing apparatus will be described as an example of the printing apparatus PRT.
図1に示す印刷装置PRTは、例えば、紙、プラスチックシートなどのシート状の媒体Mを搬送しつつ印刷処理を行う装置である。印刷装置PRTは、筐体PBと、媒体Mにインクを噴射するインクジェット機構IJと、当該インクジェット機構IJにインクを供給するインク供給機構SPと、媒体Mを搬送する搬送機構CVと、インクジェット機構IJの保全動作を行うメンテナンス機構MNと、これら各機構を制御する制御装置CONTとを備えている。 The printing apparatus PRT shown in FIG. 1 is an apparatus that performs a printing process while conveying a sheet-like medium M such as paper or a plastic sheet. The printing apparatus PRT includes a housing PB, an inkjet mechanism IJ that ejects ink onto the medium M, an ink supply mechanism SP that supplies ink to the inkjet mechanism IJ, a transport mechanism CV that transports the medium M, and an inkjet mechanism IJ. The maintenance mechanism MN that performs the maintenance operation of the above and the control device CONT that controls these mechanisms.
本実施形態では、色素材料(機能材料)を例えば水などの液状媒体に分散させたインクが用いられている。加えて、本実施形態では、例えば水分含有率が50%程度(通常は70%程度)の高粘度インクが用いられている。また、本実施形態に係る印刷装置PRTとして、例えば商業用の印刷装置を用いても構わない。 In this embodiment, ink in which a pigment material (functional material) is dispersed in a liquid medium such as water is used. In addition, in this embodiment, for example, a high-viscosity ink having a water content of about 50% (usually about 70%) is used. Further, as the printing apparatus PRT according to the present embodiment, for example, a commercial printing apparatus may be used.
以下、XYZ直交座標系を設定し、当該XYZ直交座標系を適宜参照しつつ各構成要素の位置関係を説明する。本実施形態では、例えば媒体Mの搬送方向をX方向とし、当該媒体Mの搬送面においてX方向に直交する方向をY方向とし、X軸及びY軸を含む平面に垂直な方向をZ方向と表記する。また、X軸周りの回転方向をθX方向、Y軸周りの回転方向をθY方向、Z軸周りの回転方向をθZ方向とする。 Hereinafter, an XYZ rectangular coordinate system is set, and the positional relationship of each component will be described with reference to the XYZ rectangular coordinate system as appropriate. In the present embodiment, for example, the conveyance direction of the medium M is the X direction, the direction perpendicular to the X direction on the conveyance surface of the medium M is the Y direction, and the direction perpendicular to the plane including the X axis and the Y axis is the Z direction. write. The rotation direction around the X axis is the θX direction, the rotation direction around the Y axis is the θY direction, and the rotation direction around the Z axis is the θZ direction.
筐体PBは、例えばY方向を長手とするように形成されている。筐体PBには、上記のインクジェット機構IJ、インク供給機構SP、搬送機構CV、メンテナンス機構MN及び制御装置CONTの各部が取り付けられている。筐体PBには、例えばプラテン13が設けられている。プラテン13は、媒体Mを支持する支持部材である。プラテン13は、例えば筐体PBのうちX方向の中央部に配置されている。プラテン13は、+Z方向に向けられた平坦面13aを有している。当該平坦面13aは、媒体Mを支持する支持面として用いられる。
The housing PB is formed, for example, with the Y direction as a longitudinal direction. Each part of the inkjet mechanism IJ, ink supply mechanism SP, transport mechanism CV, maintenance mechanism MN, and control device CONT is attached to the housing PB. For example, a
搬送機構CVは、例えば搬送ローラーや当該搬送ローラーを駆動するモーターなどを有している。搬送機構CVは、例えば筐体PBの−X側から当該筐体PBの内部に媒体Mを搬送し、当該筐体PBの+X側から当該筐体PBの外部に排出する。搬送機構CVは、筐体PBの内部において、媒体Mがプラテン13上を通過するように当該媒体Mを搬送する。搬送機構CVは、例えば制御装置CONTによって搬送のタイミングや搬送量などが制御されるようになっている。
The transport mechanism CV includes, for example, a transport roller and a motor that drives the transport roller. For example, the transport mechanism CV transports the medium M into the housing PB from the −X side of the housing PB and discharges the medium M from the + X side of the housing PB to the outside of the housing PB. The transport mechanism CV transports the medium M so that the medium M passes over the
インクジェット機構IJは、インクを噴射するヘッドHと、当該ヘッドHを保持して移動させるヘッド移動機構ACとを有している。ヘッドHは、プラテン13上に送り出された媒体Mに向けてインクを噴射する。ヘッドHは、インクを噴射する噴射面Haを有している。噴射面Haは、例えば−Z方向に向けられており、例えばプラテン13の支持面13aに対向するように配置されている。
The inkjet mechanism IJ has a head H that ejects ink and a head moving mechanism AC that holds and moves the head H. The head H ejects ink toward the medium M sent onto the
ヘッド移動機構ACは、キャリッジ4を有している。ヘッドHは、当該キャリッジ4に固定されている。キャリッジ4は、筐体PBの長手方向(X方向)に架けられたガイド軸8に当接されている。ヘッドH及びキャリッジ4は、例えばプラテン13の+Z方向に配置されている。
The head moving mechanism AC has a carriage 4. The head H is fixed to the carriage 4. The carriage 4 is in contact with a guide shaft 8 that extends in the longitudinal direction (X direction) of the housing PB. The head H and the carriage 4 are disposed in the + Z direction of the
ヘッド移動機構ACは、キャリッジ4の他、例えばパルスモーター9と、当該パルスモーター9によって回転駆動される駆動プーリー10と、駆動プーリー10とはプリンタ本体5の幅方向の反対側に設けられた遊転プーリー11と、駆動プーリー10と遊転プーリー11との間に掛け渡されてキャリッジ4に接続されたタイミングベルト12とを有している。
In addition to the carriage 4, the head moving mechanism AC includes, for example, a
キャリッジ4は、当該タイミングベルト12に接続されている。キャリッジ4は、タイミングベルト12の回転に伴ってY方向に移動可能に設けられている。Y方向へ移動する際、キャリッジ4は、ガイド軸8によって案内されるようになっている。
The carriage 4 is connected to the
インク供給機構SPは、ヘッドHにインクを供給する。インク供給機構SPには、例えば複数のインクカートリッジ6が収容されている。本実施形態の印刷装置PRTは、インクカートリッジ6がヘッドHとは異なる位置に収容される構成(オフキャリッジ型)である。インク供給機構SPは、例えばヘッドHとインクカートリッジ6とを接続する供給チューブTBを有している。インク供給機構SPは、当該供給チューブTBを介してインクカートリッジ6内に貯留されるインクをヘッドHに供給する不図示のポンプ機構を有している。
The ink supply mechanism SP supplies ink to the head H. For example, a plurality of
メンテナンス機構MNは、ヘッドHのホームポジションに配置されている。このホームポジションは、例えば媒体Mに対して印刷が行われる領域から外れた領域に設定されている。本実施形態では、例えばプラテン13の+Y側にホームポジションが設定されている。ホームポジションは、例えば印刷装置PRTの電源がオフである時や、長時間に亘って記録が行われない時などに、ヘッドHが待機する場所である。
The maintenance mechanism MN is disposed at the home position of the head H. This home position is set, for example, in an area outside the area where printing is performed on the medium M. In the present embodiment, for example, the home position is set on the + Y side of the
メンテナンス機構MNは、例えばヘッドHの噴射面Haを覆うキャッピング機構CPや、当該噴射面Haを払拭するワイピング機構WPなどを有している。キャッピング機構CPは、キャッピング部材50を有している。キャッピング部材50には、例えば吸引ポンプなどの吸引機構SCが接続されている。吸引機構SCにより、キャッピング機構CPは、例えば噴射面Haを覆いつつ当該噴射面Ha上の空間を吸引できるようになっている。ヘッドHからメンテナンス機構MN側に排出された廃インクは、例えば廃液回収機構(不図示)において回収されるようになっている。ワイピング機構WPは、ワイピング部材51を有している。
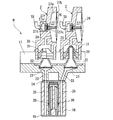
図2は、ヘッドHの構成を示す側断面図である。図3は、ヘッドHの構成を説明する要部断面図である。
図2に示されるように、ヘッドHは、導入針ユニット17、ヘッドケース18、流路ユニット19及びアクチュエータユニット20を備えている。
The maintenance mechanism MN includes, for example, a capping mechanism CP that covers the ejection surface Ha of the head H, a wiping mechanism WP that wipes the ejection surface Ha, and the like. The capping mechanism CP has a capping
FIG. 2 is a side sectional view showing the configuration of the head H. As shown in FIG. FIG. 3 is a cross-sectional view of a main part for explaining the configuration of the head H.
As shown in FIG. 2, the head H includes an
導入針ユニット17の上面には、フィルタ21を介在させた状態で2本のインク導入針22が並んで取り付けられている。導入針ユニット17の内部には、各インク導入針22に対応したインク導入路23が形成されている。インク導入路23の上端は、フィルタ21を介してインク導入針22に接続されている。インク導入路23の下端は、パッキン24を介してヘッドケース18内部のケース流路25に接続されている。インク導入針22には、それぞれサブタンク2が装着されている。
Two ink introduction needles 22 are attached to the upper surface of the
サブタンク2は、例えばポリプロピレン等の樹脂製材料を用いて形成されている。サブタンク2には、インク室27が設けられている。インク室27は、例えばすり鉢状に形成された凹部27aを有している。凹部27aは、開口部27bを有している。開口部27bには、透明な弾性シート26が貼り付けられている。凹部27aの底部には、連通孔27cが形成されている。連通孔27cは、インク室27の凹部27aとインク供給室27dとの間を連通するように形成されている。インク供給室27dは、例えば供給チューブTBに接続されている。インク供給室27dのうち例えば供給チューブTBとの接続部分には、例えば不図示のフィルタなどが設けられている。
The
弾性シート26は、開口部27bを塞ぐように貼り付けられている。弾性シート26は、インク室27の圧力に応じて伸縮するようになっている。弾性シート26は、例えばインク室27の圧力が外部の圧力よりも高くなると凹部27aの外側へ向けて膨張した状態となり、インク室27の容積が増加した状態となる。インク室27の圧力が外部の圧力よりも低くなると凹部27aの内側へ向けて膨張した状態となり、インク室27の容積が減少した状態となる。
The
弾性シート26には、弁27eが取り付けられている。弁27eは、凹部27aから連通孔27cを介してインク供給室27dに接続されており、インク供給室27d側から連通孔27cを開閉するように形成されている。弁27eは、弾性シート26が膨張及び収縮に連動して連通孔27cを開閉するようになっている。具体的には、インク室27の容積を減少させる方向に弾性シート26が膨張したときに連通孔27cが開状態となり、インク室27の容積を増加させる方向に弾性シート26が膨張したときには連通孔27cが閉状態となる。弁27eには、所定の弾性力を付与する付勢部材27fが取り付けられており、連通孔27cの開閉の圧力が調整されている。
A
サブタンク2は、針接続部28に接続されている。針接続部28は、インク導入針22サブタンク2とインク導入針22とを接続する部分である。インク室27の凹部27aには、当該針接続部28に接続される接続流路29が形成されている。針接続部28の内部空間には、インク導入針22がほぼ隙間無く嵌め込まれるシール材31が設けられている。インク導入針22がシール材31に嵌め込まれることで、サブタンク2と導入針ユニット17との間がほぼ漏れの無い状態で接続されるようになっている。
The
図3に示すように、ヘッドケース18は、合成樹脂などを用いて形成されている。ヘッドケース18は、例えば中空部を有するように箱型に形成されている。ヘッドケース18は、上端側がパッキン24を介して導入針ユニット17を取り付けられている。ヘッドケース18の下端面には、流路ユニット19が接合されている。ヘッドケース18の内部に形成された中空部37内には、アクチュエータユニット20が収容されている。
As shown in FIG. 3, the
ヘッドケース18の内部には、高さ方向を貫通してケース流路25が設けられている。ケース流路25の上端は、パッキン24を介して導入針ユニット17のインク導入路23に連通されている。ケース流路25の下端は、流路ユニット19内の共通インク室44に連通されている。このため、インク導入針22から導入されたインクDは、インク導入路23及びケース流路25を通じて共通インク室44側に供給されるようになっている。
A
アクチュエータユニット20は、例えば櫛歯状に配置された複数の圧電振動子38と、当該圧電振動子38を保持する固定板39と、圧電振動子38に対して制御装置CONTからの駆動信号を供給するフレキシブルケーブル40とを有している。
The
圧電振動子38は、図中下側端部が固定板39の下端面から突出するように固定されている。このように、各圧電振動子38は、所謂片持ち梁の状態で固定板39上に取り付けられている。各圧電振動子38を支持する固定板39は、例えば厚さ1mm程度のステンレス鋼によって構成されている。固定板39のうち例えば圧電振動子38の固定された面とは異なる面が中空部37を区画するケース内壁面に接着されている。
The
流路ユニット19は、振動板41、流路基板42及びノズル基板43を有している。振動板41、流路基板42及びノズル基板43は、積層された状態で接着されている。流路ユニット19は、共通インク室44からインク供給口45、圧力室46を通り、ノズルNZに至るまでの一連のインク流路(液体流路)を構成している。圧力室46は、ノズルNZの配列方向(ノズル列方向)に対して直交する方向が長手方向となるように形成されている。
The
共通インク室44は、ケース流路25に接続されている。共通インク室44には、インク導入針22側からのインクDが導入される室である。また、共通インク室44は、インク供給口45に接続されている。共通インク室44に導入されたインクDは、当該インク供給口45を通じて各圧力室46に分配されるようになっている。
The
ノズル基板43は、流路ユニット19の底部に配置されている。ノズル基板43には、媒体Mに形成される画像などのドット形成密度に対応したピッチ(例えば180dpi)で複数のノズルNZが形成されている。ノズル基板43としては、例えばステンレス鋼などの金属製の板材が用いられる。
The
図4は印刷装置PRTの電気的な構成を示すブロック図である。
制御装置CONTには、印刷装置PRTの動作に関する各種情報を入力する入力装置IP、印刷装置PRTの動作に関する各種情報を記憶した記憶装置MRなどが接続されており、上述した搬送機構CVや、ヘッド移動機構AC、メンテナンス機構MN等が接続されている。制御装置CONTは、メンテナンス機構MNのうち例えばキャッピング機構CPやワイピング機構WPなどを制御可能である。
FIG. 4 is a block diagram showing an electrical configuration of the printing apparatus PRT.
The control device CONT is connected to an input device IP for inputting various information relating to the operation of the printing device PRT, a storage device MR storing various information relating to the operation of the printing device PRT, and the like. A moving mechanism AC, a maintenance mechanism MN, and the like are connected. The control device CONT can control, for example, the capping mechanism CP and the wiping mechanism WP among the maintenance mechanisms MN.
印刷装置PRTは、それぞれの圧電振動子38に入力する駆動信号を発生する駆動信号発生器62を備えている。この駆動信号発生器62は、制御装置CONTに接続されている。駆動信号発生器62には、ヘッドHの圧電振動子38に入力する吐出パルスの電圧値の変化量を示すデータ、及び吐出パルスの電圧を変化させるタイミングを規定するタイミング信号が入力される。駆動信号発生器62は、各圧電振動子38に対して、個別に駆動信号を供給可能に設けられている。
The printing apparatus PRT includes a
次に、上記のように構成された印刷装置PRTの動作を説明する。
ヘッドHによる印刷動作を行う場合、制御装置CONTは、搬送機構CVによって媒体MをヘッドHの−Z側に配置させる。媒体Mを配置させた後、制御装置CONTは、ヘッドHを移動させつつ、印刷する画像の画像データに基づいてノズルNZに係る駆動信号発生器62から圧電振動子38に駆動信号を入力する。
Next, the operation of the printing apparatus PRT configured as described above will be described.
When performing the printing operation by the head H, the control device CONT arranges the medium M on the −Z side of the head H by the transport mechanism CV. After disposing the medium M, the controller CONT inputs a drive signal from the
圧電振動子38に駆動信号が入力されると、圧電振動子38が伸縮する。圧電振動子38の伸縮により、圧力室46の容積が変化し、インクを収容した圧力室46の圧力が変動する。この圧力の変動によって、ノズルNZからインクが噴射される。ノズルNZから噴射されたインクによって、媒体Mに所望の画像が形成される。なお、圧電振動子38を伸縮させる場合、上記の第1電気信号を圧電振動子38に供給しても構わない。また、第1電気信号とは異なる駆動信号を圧電振動子38に供給しても構わない。
When a drive signal is input to the
制御装置CONTは、ヘッドHのメンテナンス動作として、例えばクリーニング動作を行わせる。クリーニング動作は、キャッピング動作や吸引動作、払拭(ワイピング)動作などを含んでいる。図5は、クリーニング動作の各工程を示すフローチャートである。以下、図5を参照しつつ、クリーニング動作を説明する。 For example, the control device CONT performs a cleaning operation as a maintenance operation of the head H. The cleaning operation includes a capping operation, a suction operation, a wiping operation, and the like. FIG. 5 is a flowchart showing each step of the cleaning operation. Hereinafter, the cleaning operation will be described with reference to FIG.
制御装置CONTは、まず、キャッピング動作を行わせる(ST01)。制御装置CONTは、ヘッドHをホームポジションに移動させ、ヘッドHとキャッピング部材50とを対向させる。同時に、制御装置CONTは、図示しない駆動機構により、キャッピング部材50をヘッドH側へ移動させて噴射面Haを押圧させる。この動作により、キャッピング部材50と噴射面Haとの間が密閉状態となる。
First, the control device CONT performs a capping operation (ST01). The control device CONT moves the head H to the home position and makes the head H and the capping
次に、制御装置CONTは、吸引動作を行わせる(ST02)。制御装置CONTは、ヘッドHとキャッピング部材50との間を密閉させた後、吸引機構SCを作動させる。この動作により、当該吸引機構SCに連通されたキャッピング部材50内が吸引されて負圧となる。ヘッドHとキャッピング部材50との間に形成された負圧により、ヘッドHの各ノズルNZからインクが吸引(排出)される。このため、ノズルNZ内のインクの粘度が適正に保持されることになる。例えばキャッピング部材50の内部にインク吸収材などを設ける構成としておき、ノズルNZから吸引(排出)されたインクを当該インク吸収材によって吸収させるようにしても構わない。
Next, the control device CONT performs a suction operation (ST02). The control device CONT operates the suction mechanism SC after sealing between the head H and the capping
吸引動作の後、制御装置CONTは、ワイピング部材51を用いて第一払拭動作を行わせる(ST03)。第一払拭動作において、まず制御装置CONTは、ワイピング部材51がヘッドHの噴射面Haに当接するように制御し、この状態からワイピング部材51の+Z側の先端がヘッドHの噴射面Haを例えば+Y方向に払拭するようにヘッドHとワイピング部材51とを相対移動させる。
After the suction operation, the control device CONT performs the first wiping operation using the wiping member 51 (ST03). In the first wiping operation, the control device CONT first controls the wiping
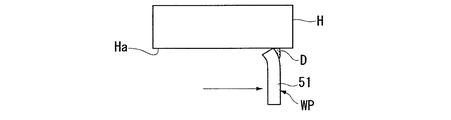
図6は、第一払拭動作後のヘッドH及びワイピング機構WPの様子を示す図である。図6に示すように、第一払拭動作後、ワイピング部材51の先端にインクDが付着している。また、ヘッドHの噴射面Haには、固化したインクの色素材料80が付着したままの状態となっている。当該固化した色素材料80は、例えばインクが噴射面Haに付着した状態でインクに含まれる水分が蒸発することで形成される。
FIG. 6 is a diagram illustrating a state of the head H and the wiping mechanism WP after the first wiping operation. As shown in FIG. 6, the ink D adheres to the tip of the wiping
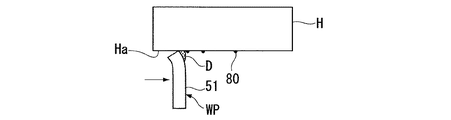
第一払拭動作の後、制御装置CONTは、ワイピング部材51を用いて第二払拭動作を行わせる(ST04)。制御装置CONTは、上記の第一払拭動作と当該第二払拭動作とを続けて行わせる。第二払拭動作において、制御装置CONTは、ワイピング部材51の先端にインクDが付着した状態のまま、例えば第一払拭動作と同一の経路でヘッドHを払拭する。このとき、制御装置CONTは、図7に示すように、ワイピング部材51の先端のインクDを噴射面Haに接触させた状態で当該噴射面Haを払拭させる。
After the first wiping operation, the control device CONT performs the second wiping operation using the wiping member 51 (ST04). The control device CONT causes the first wiping operation and the second wiping operation to be performed continuously. In the second wiping operation, the control device CONT wipes the head H, for example, through the same path as the first wiping operation, with the ink D attached to the tip of the wiping
ワイピング部材51が上記の固化した色素材料に到達すると、図8に示すように、当該ワイピング部材51の先端のインクDが色素材料80に接触する。当該インクDは、液状媒体である水を含んでいるため、色素材料80はインクDの水に分散(再分散)されることになる。なお、当該色素材料80が再分散された状態とは、例えば色素材料80が噴射面HaからインクD内に溶け落ちた状態に加えて、例えば色素材料80が噴射面Ha上に水分を含んで付着している状態も含まれる。水分を含んで噴射面Haに付着している場合、ワイピング部材51によって噴射面Haを払拭することにより、当該色素材料80は容易に剥がれ落ちる。
When the wiping
制御装置CONTは、このような第二払拭動作を予め設定された回数(所定回数)行わせる。なお、第二払拭動作を行わせる回数については、2回以上とすることが好ましく、例えば4回程度行わせても構わない。また、第二払拭動作の回数を変更することが可能な構成としても構わない。一連の第二払拭動作により、図9に示すように、噴射面Haに付着していた色素材料80がインクDに再分散されて噴射面Haから除去される。
The control device CONT causes such a second wiping operation to be performed a preset number of times (a predetermined number of times). In addition, about the frequency | count which performs a 2nd wiping operation | movement, it is preferable to set it as 2 times or more, for example, you may carry out about 4 times. Moreover, it does not matter as a structure which can change the frequency | count of 2nd wiping operation | movement. By a series of second wiping operations, as shown in FIG. 9, the
第二払拭動作を所定回数行わせた後(ST05のYES)、制御装置CONTは、キャッピング機構CPを用いて再度吸引動作を行わせる(ST06)。この吸引動作はノズルNZのメニスカスを調整するために行うものであるため、制御装置CONTは上記の吸引動作(ST02)に比べて弱い吸引力で行わせる(微量吸引)。微量吸引動作の後、制御装置CONTは、上記の第一払拭動作及び第二払拭動作をそれぞれ行わせて(ST07〜ST09)、クリーニング動作を完了する。 After the second wiping operation is performed a predetermined number of times (YES in ST05), the control device CONT performs the suction operation again using the capping mechanism CP (ST06). Since this suction operation is performed to adjust the meniscus of the nozzle NZ, the control device CONT performs the suction operation with a weaker suction force than the above suction operation (ST02) (a small amount of suction). After the microscopic suction operation, the control device CONT performs the first wiping operation and the second wiping operation (ST07 to ST09), and completes the cleaning operation.
以上のように、本実施形態によれば、第一払拭動作及び第二払拭動作を行うことにより、噴射面Haに残留する色素材料80が、第一払拭動作によってワイピング部材51に付着したインクDの水分に再分散されるため、噴射面Haに残留する色素材料80をより確実に払拭することができる。これにより、噴射面Haの清浄化を図ることができる。
As described above, according to the present embodiment, by performing the first wiping operation and the second wiping operation, the
本発明の技術範囲は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で適宜変更を加えることができる。
例えば、上記実施形態においては、クリーニング動作を行う際、予め設定された所定回数に従って第二払拭動作を行う場合を例に挙げて説明したが、これに限られることは無い。例えば図10に示すように、制御装置CONTにおいて所定回数を設定するようにしても構わない(ST11)。制御装置CONTは、例えばキャッピング動作(ST12)及び吸引動作(ST13)に先立って当該所定回数の設定を行うようにする。
The technical scope of the present invention is not limited to the above-described embodiment, and appropriate modifications can be made without departing from the spirit of the present invention.
For example, in the above-described embodiment, the case where the second wiping operation is performed according to a predetermined number of times when performing the cleaning operation has been described as an example. However, the present invention is not limited to this. For example, as shown in FIG. 10, the control device CONT may set a predetermined number of times (ST11). For example, the control device CONT performs the setting for the predetermined number of times prior to the capping operation (ST12) and the suction operation (ST13).
所定回数の設定については、例えば図11に示すように、制御装置CONTはまずワイピング係数を算出し(ST21)、当該ワイピング係数に基づいて所定回数を算出する(ST22)ことで当該所定回数の設定を行うことができる。ここで、ワイピング係数は、クリーニング動作の累積回数に基づいて以下の式(1)を用いて求められる。また、ワイピング係数を用いて所定回数を算出する場合には、以下の式(2)を用いる。 For example, as shown in FIG. 11, the control device CONT first calculates a wiping coefficient (ST21), and calculates the predetermined number of times based on the wiping coefficient (ST22). It can be performed. Here, the wiping coefficient is obtained using the following equation (1) based on the cumulative number of cleaning operations. Further, when the predetermined number of times is calculated using the wiping coefficient, the following equation (2) is used.
(ワイピング係数)=(累積回数)/(基準回数)…(1) (Wiping coefficient) = (cumulative count) / (reference count) (1)
(所定回数)=(ワイピング係数)+(基準ワイピング回数)…(2) (Predetermined number of times) = (wiping coefficient) + (reference wiping number of times) (2)
式(1)において、累積回数は、それまでに行われたクリーニング動作の積算回数である。基準回数は、例えば予め設定された閾値である。式(2)において、基準ワイピング回数は、予め設定された閾値である。上記式(1)及び式(2)を用いて求めた所定回数に従って、制御装置CONTは、上記実施形態と同様の手順で以下の各ステップ(ST12〜ST20)を行わせる。 In Equation (1), the cumulative number is the cumulative number of cleaning operations that have been performed so far. The reference number is, for example, a preset threshold value. In Equation (2), the reference wiping count is a preset threshold value. In accordance with the predetermined number of times obtained using the above equations (1) and (2), the control device CONT causes the following steps (ST12 to ST20) to be performed in the same procedure as in the above embodiment.
また、ワイピング係数は、クリーニング動作の累積回数に基づいた場合に限られず、例えばクリーニング動作が行われてからの経過時間に基づいて以下の式(3)を用いて求めるようにしても構わない。なお、ワイピング係数を用いて所定回数を算出する場合には、上式(2)が用いられる。 Further, the wiping coefficient is not limited to the case based on the cumulative number of cleaning operations, and may be obtained using the following formula (3) based on the elapsed time since the cleaning operation was performed, for example. In addition, when calculating the predetermined number of times using the wiping coefficient, the above equation (2) is used.
(ワイピング係数)=(経過時間)/(基準時間)…(3) (Wiping coefficient) = (elapsed time) / (reference time) (3)
式(3)において、経過時間は、直近のクリーニング動作が行われてからの経過時間である。基準時間は、予め設定された閾値である。 In equation (3), the elapsed time is the elapsed time since the most recent cleaning operation was performed. The reference time is a preset threshold value.
また、所定回数の設定については、例えば図12に示すように、まず制御装置CONTはワイピング判定を求め(ST31)、当該ワイピング判定に基づいて所定回数を算出する(ST32)ことで当該所定回数の設定を行っても構わない。ここで、ワイピング判定は、クリーニング動作の累積回数に基づいて以下の式(4)を用いて求められる。 As for setting the predetermined number of times, for example, as shown in FIG. 12, the control device CONT first obtains a wiping determination (ST31), and calculates the predetermined number of times based on the wiping determination (ST32). You can set it. Here, the wiping determination is obtained using the following equation (4) based on the cumulative number of cleaning operations.
(ワイピング判定)=(累積回数)Mod(基準回数)…(4) (Wiping determination) = (cumulative count) Mod (reference count) (4)
式(4)において、累積回数は、それまでに行われたクリーニング動作の積算回数である。基準回数は、例えば予め設定された閾値である。ワイピング判定に応じて所定回数を求める場合、制御装置CONTは、例えばワイピング判定の値が0であるか否かを判断する。ワイピング判定が0である場合には、予め設定された値(複数回)を所定回数とし、ワイピング判定が0でない場合には、所定回数を1回とする。この場合、クリーニング動作が一定の回数(基準回数)行われる毎に第二払拭動作が複数回行われ、それ以外には第二払拭動作が一回のみ行われる。 In Expression (4), the cumulative number is the cumulative number of cleaning operations performed so far. The reference number is, for example, a preset threshold value. When determining the predetermined number of times according to the wiping determination, the control device CONT determines whether or not the value of the wiping determination is 0, for example. When the wiping determination is 0, a predetermined value (multiple times) is set as a predetermined number, and when the wiping determination is not 0, the predetermined number is set as 1 time. In this case, every time the cleaning operation is performed a certain number of times (reference number), the second wiping operation is performed a plurality of times, and otherwise, the second wiping operation is performed only once.
PRT…印刷装置 M…媒体 MN…メンテナンス機構 CONT…制御装置 H…ヘッド Ha…噴射面 CP…キャッピング機構 WP…ワイピング機構 SC…吸引機構 NZ…ノズル D…インク 50…キャッピング部材 51…ワイピング部材 62…駆動信号発生器 80…色素材料
PRT ... Printer M ... Media MN ... Maintenance mechanism CONT ... Control device H ... Head Ha ... Ejecting surface CP ... Capping mechanism WP ... Wiping mechanism SC ... Suction mechanism NZ ... Nozzle D ...
Claims (4)
前記噴射面を払拭するワイピング部と、
前記ワイピング部に前記噴射面の第一払拭動作を行わせると共に、前記第一払拭動作によって払拭された前記流体の前記液状媒体が、前記ワイピング部に付着した状態のまま、前記第一払拭動作と同一経路で前記ワイピング部に前記噴射面の第二払拭動作を行わせる制御部と、
前記噴射面を覆い、前記噴射面との間の空間を吸引して前記流体を排出させるキャッピング部と、
を備え、
前記制御部は、前記噴射ヘッドのクリーニング動作として、前記キャッピング部による前記噴射面の吸引動作を行わせると共に、当該吸引動作後に前記第一払拭動作及び前記第二払拭動作を行わせ、かつ前記制御部は、前記クリーニング動作の積算回数である累積回数と、予め設定された閾値である基準回数とに基づいて前記第二払拭動作の回数を算出する流体噴射装置。 An ejection head having an ejection surface for ejecting a fluid in which a functional material is dispersed in a liquid medium;
A wiping portion for wiping the ejection surface;
The first wiping operation is performed while causing the wiping unit to perform the first wiping operation of the ejection surface and the liquid medium of the fluid wiped by the first wiping operation is attached to the wiping unit. A control unit that causes the wiping unit to perform a second wiping operation of the ejection surface in the same path;
A capping portion that covers the ejection surface and sucks a space between the ejection surface and discharges the fluid;
With
The control unit performs a suction operation of the ejection surface by the capping unit as a cleaning operation of the ejection head, performs the first wiping operation and the second wiping operation after the suction operation, and performs the control parts are fluid injection device calculates the cumulative number said a number of integrations cleaning operation, the number of the second wiping operation based on the preset threshold der Ru reference number.
請求項1に記載の流体噴射装置。 The fluid ejecting apparatus according to claim 1.
請求項1又は請求項2に記載の流体噴射装置。 The fluid ejecting apparatus according to claim 1 , wherein the control unit causes the first wiping operation and the second wiping operation to be continuously performed.
請求項1から請求項3のうちいずれか一項に記載の流体噴射装置。 The fluid ejection according to any one of claims 1 to 3 , wherein the control unit sets the number of times of the second wiping operation and causes the second wiping operation to be performed by the number of times according to the setting result. apparatus.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010121765A JP5750836B2 (en) | 2010-05-27 | 2010-05-27 | Fluid ejection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010121765A JP5750836B2 (en) | 2010-05-27 | 2010-05-27 | Fluid ejection device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011245765A JP2011245765A (en) | 2011-12-08 |
| JP2011245765A5 JP2011245765A5 (en) | 2013-05-30 |
| JP5750836B2 true JP5750836B2 (en) | 2015-07-22 |
Family
ID=45411628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010121765A Active JP5750836B2 (en) | 2010-05-27 | 2010-05-27 | Fluid ejection device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5750836B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1048097A (en) * | 1996-07-31 | 1998-02-20 | Shinei Denshi Keisokki Kk | Push button switch inspecting device |
| JP6177742B2 (en) * | 2014-08-26 | 2017-08-09 | 京セラドキュメントソリューションズ株式会社 | Inkjet recording apparatus and wiping method |
| JP6180389B2 (en) * | 2014-09-08 | 2017-08-16 | 京セラドキュメントソリューションズ株式会社 | RECOVERY SYSTEM OF PRINT HEAD, INKJET RECORDING DEVICE EQUIPPED WITH THE SAME, AND RECOVERY METHOD OF RECORD HEAD |
| JP6308103B2 (en) * | 2014-11-06 | 2018-04-11 | 京セラドキュメントソリューションズ株式会社 | RECOVERY SYSTEM OF PRINT HEAD, INKJET RECORDING DEVICE EQUIPPED WITH THE SAME, AND RECOVERY METHOD OF RECORD HEAD |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5103244A (en) * | 1990-07-05 | 1992-04-07 | Hewlett-Packard Company | Method and apparatus for cleaning ink-jet printheads |
| JPH07148934A (en) * | 1993-09-28 | 1995-06-13 | Hewlett Packard Co <Hp> | Maintenance method of ink-jet print head |
| JPH08252969A (en) * | 1995-03-17 | 1996-10-01 | Canon Inc | Recording medium and image forming method using the medium |
| JP4314702B2 (en) * | 1998-11-26 | 2009-08-19 | セイコーエプソン株式会社 | Printing apparatus, writing method, and printer |
| JP2001219567A (en) * | 2000-02-08 | 2001-08-14 | Seiko Epson Corp | Ink jet recorder |
| JP2006212863A (en) * | 2005-02-02 | 2006-08-17 | Fuji Xerox Co Ltd | Inkjet recording device and method for cleaning nozzle face of inkjet recording head |
| JP2006326881A (en) * | 2005-05-23 | 2006-12-07 | Fuji Xerox Co Ltd | Ink jet recorder and its wiping method |
| JP2009018428A (en) * | 2007-07-10 | 2009-01-29 | Seiko Epson Corp | Liquid jet apparatus, and wiping method of liquid ejection head in liquid jet apparatus |
-
2010
- 2010-05-27 JP JP2010121765A patent/JP5750836B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011245765A (en) | 2011-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5655519B2 (en) | Liquid supply valve unit and liquid ejecting apparatus | |
| JP3781284B2 (en) | Inkjet recording head and recording apparatus therefor | |
| JP5447203B2 (en) | Liquid ejector | |
| JP2009226719A (en) | Fluid jetting device | |
| JP2008168565A (en) | Fluid jetting device | |
| JP2006289809A (en) | Inkjet printer | |
| JP5750836B2 (en) | Fluid ejection device | |
| JP2016000475A (en) | Liquid jet device, control method of liquid jet head, and control method of the liquid jet device | |
| JP2004025531A (en) | Maintenance method and maintenance fitment of inkjet head | |
| JP6922611B2 (en) | Inkjet recording device | |
| JP5321154B2 (en) | Fluid ejecting apparatus and valve unit | |
| JP6007484B2 (en) | Liquid ejection device | |
| JP2010208049A (en) | Fluid jetting apparatus and valve unit | |
| JP5644309B2 (en) | Fluid ejection device | |
| JP2009148927A (en) | Liquid jetting apparatus | |
| JP5262096B2 (en) | Maintenance method of fluid ejecting apparatus and fluid ejecting apparatus | |
| JP5776164B2 (en) | Maintenance unit and liquid ejecting apparatus | |
| JP5499883B2 (en) | Fluid ejection device | |
| JP2019025740A (en) | Recording head and inkjet recording apparatus including the same | |
| JP6019562B2 (en) | Liquid ejector | |
| JP2009148929A (en) | Liquid jetting apparatus | |
| JP2011062869A (en) | Liquid discharge device | |
| JP2009226881A (en) | Fluid ejection device | |
| JP5621299B2 (en) | Fluid ejecting apparatus and fluid ejecting head maintenance method | |
| JP2011255620A (en) | Liquid ejection apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130409 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150504 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5750836 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |