JP5750697B2 - 表示装置および表示プログラム - Google Patents
表示装置および表示プログラム Download PDFInfo
- Publication number
- JP5750697B2 JP5750697B2 JP2011102004A JP2011102004A JP5750697B2 JP 5750697 B2 JP5750697 B2 JP 5750697B2 JP 2011102004 A JP2011102004 A JP 2011102004A JP 2011102004 A JP2011102004 A JP 2011102004A JP 5750697 B2 JP5750697 B2 JP 5750697B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- image
- display
- display device
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Studio Devices (AREA)
- Indication In Cameras, And Counting Of Exposures (AREA)
- Camera Data Copying Or Recording (AREA)
- Television Signal Processing For Recording (AREA)
Description
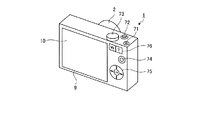
図1は、本発明の実施の形態1に係る表示装置である撮像装置の被写体に面する側(前面側)の構成を示す図である。図2は、本実施の形態1に係る表示装置である撮像装置のユーザに面する側(背面側)の構成を示す図である。図3は、本実施の形態1に係る表示装置である撮像装置の構成を示すブロック図である。
レンズ駆動部22は、ステッピングモータまたはDCモータを用いて構成され、レンズ部21のレンズ群を光軸L1上に沿って移動させることにより、レンズ部21のピント位置および焦点距離等の変更を行う。
絞り駆動部24は、ステッピングモータ等によって構成され、絞り23を駆動する。
シャッター駆動部26は、ステッピングモータ等によって構成され、操作入力部7から入力されるレリーズ信号に応じてシャッター25を駆動する。
BI=(I2−I1)/(T2−T1) ・・・(1)
BK=(K2−K1)/(T2−T1) ・・・(2)
続いて、位置算出部123は、式(1)、(2)の算出結果と現在位置P0の時刻情報を用いて、現在位置P0の緯度I0,経度K0をそれぞれ算出する。
I0=I2+BI・(T0−T2)
=I2+(I2−I1)・(T0−T2)/(T2−T1) ・・・(3)
K0=K2+BK・(T0−T2)
=K2+(K2−K1)・(T0−T2)/(T2−T1) ・・・(4)
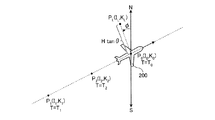
IL=I0+Htanθcosφ ・・・(5)
KL=K0−Htanθsinφ ・・・(6)
ここで、位置算出部123は、式(5)の右辺のI0および式(6)の右辺のK0に対し、式(3)、(4)の算出結果をそれぞれ代入する。なお、ステップS9で姿勢判定部124が判定した俯角をαとおくと、俯角αと傾斜角θとは、度(°)を単位としてα+θ=90°を満たす。
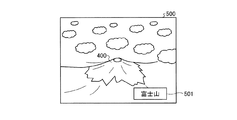
本発明の実施の形態2は、撮影後のレックビュー画像を表示する際にランドマーク名を重ねて表示したり、再生時の再生画像にランドマーク名を重ねて表示したりすることを特徴とする。なお、本実施の形態2に係る表示装置である撮像装置の構成は、実施の形態1で説明した撮像装置1と同様である。
BI’=(I4−I3)/(T4−T3) ・・・(7)
BK’=(K4−K3)/(T4−T3) ・・・(8)
続いて、位置算出部123は、式(7)、(8)の算出結果と撮像位置P0'の時刻情報を用いて、撮像位置P0'の緯度I0',経度K0'をそれぞれ算出する。
I0'=I3−BI'・(T3−T0')
=I3−(I4−I3)・(T3−T0')/(T4−T3) ・・・(9)
K0'=K3−BK'・(T3−T0')
=K3−(K4−K3)・(T3−T0')/(T4−T3) ・・・(10)
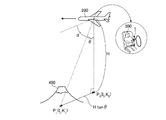
最後に、位置算出部123は、レンズ部21の光軸L1の方向とレンズ部21の中心位置を通過する鉛直面とのなす傾斜角θ、飛行機200の高度H、方位検出部6が検出した被写体400の方位を示す方位角として経線の北向きを基準とする方位角φ'(北向きに対して反時計回りを正)を用いることにより、被写体の緯度IL'、経度KL'をそれぞれ算出する。
IL'=I0'+Htanθcosφ' ・・・(11)
KL'=K0'−Htanθsinφ' ・・・(12)
ここで、位置算出部123は、式(11)の右辺のI0'および式(12)の右辺のK0'に対し、式(9)、(10)の算出結果をそれぞれ代入する。
2 撮像部
3 発光部
4 姿勢検出部
5 タイマー
6 方位検出部
7 操作入力部
8 GPS信号受信部
9 表示部
10 タッチパネル
11 記憶部
12 制御部
21 レンズ部
22 レンズ駆動部
23 絞り
24 絞り駆動部
25 シャッター
26 シャッター駆動部
27 撮像素子
28 撮像駆動部
29 信号処理部
100 GPS衛星
111 画像データ記憶部
112 プログラム記憶部
113 地図情報記憶部
114 ランドマーク情報記憶部
121 画像処理部
122 測位部
123 位置算出部
124 姿勢判定部
125 撮像制御部
126 検索部
127 方向判定部
128 画像合成部
129 表示制御部
200 飛行機
300 撮影者
400 被写体
500 合成スルー画像
501 ランドマーク名表示画像
600 現在位置表示画像
601 飛行機像
Claims (5)
- 画像を表示可能な表示部を備えた表示装置であって、
所定の視野領域から光を集光するレンズ部を有し、被写体を撮像して該被写体の画像データを生成する撮像部と、
GPS信号を受信するGPS信号受信部と、
前記GPS信号受信部が受信したGPS信号を用いて当該表示装置の位置および高度を定期的に測定する測位部と、
水平面を基準としたときの当該表示装置の姿勢を検出する姿勢検出部と、
前記レンズ部の光軸が向いている方位を検出する方位検出部と、
前記測位部が異なる2つの時刻に測定した位置に基づいて、撮像時の当該表示装置の位置を算出するとともに、この算出結果と、前記撮像部が前記被写体を撮像した撮像時に前記測位部が測定した当該表示装置の高度と、前記姿勢検出部が検出した検出結果と、前記方位検出部が検出した検出結果とを用いて前記被写体の位置を算出する位置算出部と、
複数のランドマークの位置および名称に関する情報を記憶するランドマーク情報記憶部と、
前記位置算出部が算出した前記被写体の位置に対応するランドマークを前記ランドマーク情報記憶部から検索する検索部と、
前記検索部が検索して取得したランドマークの名称に関する情報を前記画像データに対応する画像に合成した合成画像データを生成する画像合成部と、
当該表示装置が移動しながら前記撮像部が前記被写体を撮像した場合、前記画像合成部が生成した前記合成画像データに対応する合成画像を前記表示部に表示させる表示制御部と、
を備えたことを特徴とする表示装置。 - 撮影指示信号を入力可能な操作入力部を備え、
前記画像合成部が合成に用いる前記画像は、前記撮像部が生成する前記画像データに対応してリアルタイムで前記表示部に表示されるスルー画像または前記操作入力部による撮影指示信号の入力に応じて前記撮像部が生成した前記画像データに対応する画像であることを特徴とする請求項1に記載の表示装置。 - 前記姿勢検出部は、前記レンズ部の光軸の方向と前記レンズ部の中心位置を通過する水平面とがなす傾斜角度を検出することを特徴とする請求項1または2に記載の表示装置。
- 地図を含む地図情報を記憶する地図情報記憶部と、
前記姿勢検出部が検出した結果に基づいて、当該表示装置が前記地図上の当該表示装置の位置を表示する位置表示姿勢をとっているか否かを少なくとも判定する姿勢判定部と、
をさらに備え、
前記画像合成部は、
前記姿勢判定部が判定した結果、当該表示装置が位置表示姿勢をとっている場合、前記地図情報記憶部が記憶する地図情報に基づいて、当該表示装置の位置を含む領域の地図および該地図上の当該表示装置の位置を示す画像を合成することによって前記合成画像データを生成することを特徴とする請求項1〜3のいずれか一項に記載の表示装置。 - 所定の視野領域から光を集光するレンズ部を有し、被写体を撮像して該被写体の画像データを生成する撮像部を備え、前記撮像部が生成した前記画像データに対応する画像を表示可能な表示装置に、
GPS信号を受信するGPS信号受信ステップと、
前記GPS信号受信ステップで受信したGPS信号を用いて当該表示装置の位置および高度を定期的に測定する測位ステップと、
水平面を基準としたときの当該表示装置の姿勢を検出する姿勢検出ステップと、
前記レンズ部の光軸が向いている方位を検出する方位検出ステップと、
前記測位ステップで異なる2つの時刻に測定した位置に基づいて、撮像時の当該表示装置の位置を算出するとともに、この算出結果と、前記撮像部が前記被写体を撮像した撮像時に前記測位ステップにおいて測定した当該表示装置の高度と、前記姿勢検出ステップにおいて検出した検出結果と、前記方位検出ステップにおいて検出した検出結果とを用いて前記被写体の位置を算出する位置算出ステップと、
前記位置算出ステップで算出した前記被写体の位置に対応するランドマークを、複数のランドマークの位置および名称に関する情報を記憶するランドマーク情報記憶部から検索する検索ステップと、
前記検索ステップで検索して取得したランドマークの名称に関する情報を前記画像データに対応する画像に合成した合成画像データを生成する画像合成ステップと、
当該表示装置が移動しながら前記撮像部が前記被写体を撮像した場合、前記画像合成ステップで生成した前記合成画像データに対応する合成画像を表示する表示ステップと、
を実行させることを特徴とする表示プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011102004A JP5750697B2 (ja) | 2011-04-28 | 2011-04-28 | 表示装置および表示プログラム |
| CN201210046512.2A CN102761703B (zh) | 2011-04-28 | 2012-02-24 | 显示装置及显示方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011102004A JP5750697B2 (ja) | 2011-04-28 | 2011-04-28 | 表示装置および表示プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012235285A JP2012235285A (ja) | 2012-11-29 |
| JP2012235285A5 JP2012235285A5 (ja) | 2014-06-05 |
| JP5750697B2 true JP5750697B2 (ja) | 2015-07-22 |
Family
ID=47056015
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011102004A Expired - Fee Related JP5750697B2 (ja) | 2011-04-28 | 2011-04-28 | 表示装置および表示プログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5750697B2 (ja) |
| CN (1) | CN102761703B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019098119A1 (ja) * | 2017-11-15 | 2019-05-23 | 村田機械株式会社 | 管理サーバ、管理システム、管理方法、及びプログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001094916A (ja) * | 1999-09-17 | 2001-04-06 | Sony Corp | 情報処理方法および装置、並びにプログラム格納媒体 |
| JP4274656B2 (ja) * | 1999-12-08 | 2009-06-10 | カシオ計算機株式会社 | カメラ装置及び被写体名称表示方法 |
| JP4292682B2 (ja) * | 2000-04-19 | 2009-07-08 | ソニー株式会社 | Gps受信機、gps測位方法、および記憶媒体 |
| JP2006186542A (ja) * | 2004-12-27 | 2006-07-13 | Konica Minolta Photo Imaging Inc | 撮像装置、およびナビゲーションシステム |
| JP4264099B2 (ja) * | 2006-09-26 | 2009-05-13 | Sky株式会社 | カメラ付き携帯機器 |
| KR101364534B1 (ko) * | 2006-11-16 | 2014-02-18 | 삼성전자주식회사 | 영상에 위치정보를 입력하는 시스템 및 그 동작 방법 |
| KR101396344B1 (ko) * | 2007-06-25 | 2014-05-19 | 삼성전자주식회사 | 영상에 위치정보를 입력하는 시스템 및 그 동작 방법 |
| US20090115862A1 (en) * | 2007-11-05 | 2009-05-07 | Sony Ericsson Mobile Communications Ab | Geo-tagging of moving pictures |
| JP2009141644A (ja) * | 2007-12-06 | 2009-06-25 | Casio Comput Co Ltd | 画像データ管理装置 |
| CN101753807B (zh) * | 2009-12-16 | 2012-11-28 | 惠州Tcl移动通信有限公司 | 一种图像摄取装置 |
-
2011
- 2011-04-28 JP JP2011102004A patent/JP5750697B2/ja not_active Expired - Fee Related
-
2012
- 2012-02-24 CN CN201210046512.2A patent/CN102761703B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102761703A (zh) | 2012-10-31 |
| CN102761703B (zh) | 2016-02-03 |
| JP2012235285A (ja) | 2012-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9438806B2 (en) | Photographing apparatus and photographing method for displaying combined avatar and map information related to a subject | |
| JP5194650B2 (ja) | 電子カメラ | |
| JP4984044B2 (ja) | 撮影システム及びその撮影条件の設定方法と、それに用いられる端末及びサーバ | |
| JP6659130B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| JP5425341B2 (ja) | 撮影装置及びプログラム | |
| JP2011249981A (ja) | 撮影装置及びその制御方法 | |
| US9215340B2 (en) | Display apparatus, display method, and computer-readable recording medium | |
| JP2008301230A (ja) | 撮像システム及び撮像装置 | |
| JP5750697B2 (ja) | 表示装置および表示プログラム | |
| JP2009008842A (ja) | 撮影システム、撮影装置、方法およびプログラム | |
| JP2004032286A (ja) | カメラ装置、被写体高度算出装置、被写体高度算出方法及びプログラム | |
| JP5176934B2 (ja) | 電子カメラ | |
| JP2012085228A (ja) | 撮影条件設定装置、撮像装置、画像処理装置および撮影条件設定プログラム | |
| JP2008011346A (ja) | 撮像システム | |
| JP2008152374A (ja) | 画像システム、撮影方位特定装置、撮影方位特定方法、プログラム | |
| JP6222170B2 (ja) | 撮像装置 | |
| JP2012227717A (ja) | 表示装置、表示プログラムおよび表示方法 | |
| JP2014180036A (ja) | 撮影装置、その制御方法、及びプログラム | |
| JP5764907B2 (ja) | 撮像装置 | |
| JP2010130590A (ja) | 撮像装置及び撮像方法 | |
| JP2015213338A5 (ja) | ||
| JP2014224861A (ja) | 表示装置および撮像装置 | |
| JP5292781B2 (ja) | 電子カメラ | |
| JP2014236319A (ja) | 撮像装置、撮像装置の制御方法、プログラム | |
| JP5736715B2 (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140417 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150407 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20150423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150422 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5750697 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |