JP5654685B2 - 動き補償方法及び動き補償装置 - Google Patents
動き補償方法及び動き補償装置 Download PDFInfo
- Publication number
- JP5654685B2 JP5654685B2 JP2013531498A JP2013531498A JP5654685B2 JP 5654685 B2 JP5654685 B2 JP 5654685B2 JP 2013531498 A JP2013531498 A JP 2013531498A JP 2013531498 A JP2013531498 A JP 2013531498A JP 5654685 B2 JP5654685 B2 JP 5654685B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- interpolation
- pixel
- coding
- depth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 52
- 238000001914 filtration Methods 0.000 claims description 68
- 241000023320 Luma <angiosperm> Species 0.000 claims description 30
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 claims description 30
- 239000013598 vector Substances 0.000 claims description 7
- 238000006243 chemical reaction Methods 0.000 description 153
- 238000005192 partition Methods 0.000 description 144
- 238000009499 grossing Methods 0.000 description 129
- 230000006870 function Effects 0.000 description 128
- 230000009466 transformation Effects 0.000 description 42
- 238000010586 diagram Methods 0.000 description 35
- 239000011159 matrix material Substances 0.000 description 20
- 238000013139 quantization Methods 0.000 description 15
- 238000000605 extraction Methods 0.000 description 13
- 230000008569 process Effects 0.000 description 12
- 230000004044 response Effects 0.000 description 10
- 230000002194 synthesizing effect Effects 0.000 description 7
- 239000000284 extract Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000010606 normalization Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000012886 linear function Methods 0.000 description 3
- 230000001131 transforming effect Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000013144 data compression Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images

































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/86—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving reduction of coding artifacts, e.g. of blockiness
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/17—Function evaluation by approximation methods, e.g. inter- or extrapolation, smoothing, least mean square method
- G06F17/175—Function evaluation by approximation methods, e.g. inter- or extrapolation, smoothing, least mean square method of multidimensional data
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/186—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a colour or a chrominance component
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
- H04N19/43—Hardware specially adapted for motion estimation or compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/521—Processing of motion vectors for estimating the reliability of the determined motion vectors or motion vector field, e.g. for smoothing the motion vector field or for correcting motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/523—Motion estimation or motion compensation with sub-pixel accuracy
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/59—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial sub-sampling or interpolation, e.g. alteration of picture size or resolution
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/63—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding using sub-band based transform, e.g. wavelets
- H04N19/635—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding using sub-band based transform, e.g. wavelets characterised by filter definition or implementation details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
- G06F17/10—Complex mathematical operations
- G06F17/17—Function evaluation by approximation methods, e.g. inter- or extrapolation, smoothing, least mean square method
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4007—Scaling of whole images or parts thereof, e.g. expanding or contracting based on interpolation, e.g. bilinear interpolation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Computational Mathematics (AREA)
- Pure & Applied Mathematics (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Mathematical Analysis (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Algebra (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Processing (AREA)
- Television Systems (AREA)
Description
副画素単位のピクセル値を生成するための画素単位ピクセルに係わる補間は、補間フィルタリングを介して具現されてもよい。補間フィルタリングを数学式で表現すれば、下記の通りである。

以下、補間部14が直交基底関数に基づいた変換及び逆変換を利用する補間フィルタリングについて説明する。特に、直交基底関数の一例として、離散コサイン変換を例として挙げて説明する。
一実施形態によって、ウィンドウ関数を利用して、補間フィルタ係数を平滑化する方式について説明する。
他の実施形態による平滑化補間フィルタは、2個のパラメータに基づいて、フィルタ係数の平滑度を決定することができる。変換及び逆変換に基づいた補間フィルタ係数と、平滑化マトリックスSとを合成した、副画素単位のための平滑化補間フィルタ係数は、数式(13)による。
一実施形態による映像補間装置10は、スプライン関数に基づいて、平滑化補間フィルタのフィルタ係数を決定することができる。
一実施形態による映像補間装置10は、多項式に基づいて、平滑化補間フィルタのフィルタ係数を決定することができる。
一実施形態による多様な平滑化補間フィルタ生成方法は、整数ではない浮動小数点数(floating point number)を生成する演算式に基づいて、フィルタ係数の絶対値は、ほぼ1より大きくない。特に、副画素単位の補間位置αによって、整数ではない実数の演算結果が発生することもある。
{fm(5/8)}={10,−35,117,196,−42,11}
すなわち、m=−2,−1,0であるときの{fm(3/8)}と、m=3,2,1であるときの{fm(5/8)}とが同一であり、m=3,2,1であるときの{fm(3/8)}と、m=−2,−1,0であるときの{fm(5/8)}とが同一であるということが確認される。従って、以下、図10ないし図12Cのテーブルでは、補間位置が1/2より小さいか、あるいはそれと同じである場合の補間フィルタ係数{fm(α)}だけが開示されているとしても、補間位置が1/2より大きい場合の残りの補間フィルタ係数{fm(α)}が決定されるということは、当業者であるならば、容易に理解することができるであろう。
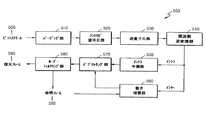
図13Aは、一実施形態による平滑化補間フィルタを利用するビデオ符号化装置のブロック図を図示している。
効率的な映像補間のために、補間フィルタ係数を選択的に決定することができる。メモリにあらかじめ保存された補間フィルタ係数において、副画素単位の補間位置、平滑度、フィルタタップ数、ビット深、スケーリング比率、変換に基づいた補間フィルタリングの基底関数の種類、カラー成分などにより、所望の補間フィルタが選択され、副画素単位のピクセル値のための補間が行われる。メモリにあらかじめ保存された補間フィルタ係数を利用して補間されたピクセルを参照して動き補償が行われることにより、演算速度が増大する。
以下、図15ないし図27を参照して、一実施形態により、ツリー構造による符号化単位に基づいて、平滑化補間フィルタを利用するビデオ符号化装置及びビデオ復号化装置、並びにそれに相応するビデオ符号化方法及びビデオ復号化方法の実施形態について説明する。
=max(MinTransformSize,RootTuSize/(2^MaxTransformSizeIndex))
現在符号化単位で可能な最小変換単位サイズ「CurrMinTuSize」と比べて、基礎変換単位サイズである「RootTuSize」は、システム上採択可能な最大変換単位サイズを示すことができる。すなわち、前記数式によれば、「RootTuSize/(2^MaxTransformSizeIndex)」は、基礎変換単位サイズである「RootTuSize」を最大変換単位分割情報に相応する回数ほど分割した変換単位サイズであり、「MinTransformSize」は、最小変換単位サイズであるので、これらのうち小さい値が、現在符号化単位で可能な最小変換単位サイズ「CurrMinTuSize」である。
すなわち、現在予測モードがインターモードであるならば、変換単位分割情報が0である場合の変換単位である基礎変換単位サイズである「RootTuSize」は、最大変換単位サイズ及び現在予測単位サイズのうち小さい値に設定される。
すなわち、現在予測モードがイントラモードであるならば、基礎変換単位サイズである「RootTuSize」は、最大変換単位サイズ及び現在パーティション単位サイズのうち小さい値に設定される。
Claims (4)
- 動き補償方法において、
現在ブロックがルマブロックである場合、ルマ参照ピクチャの1/4画素単位のサンプルを決定するために、前記ルマ参照ピクチャの整数画素単位のルマサンプルに対して8タップの補間フィルタを適用して2/4−画素位置のルマサンプルを生成する段階と、
前記現在ブロックがクロマブロックである場合、クロマ参照ピクチャの1/8画素単位のサンプルを決定するために、前記クロマ参照ピクチャの整数画素単位のクロマサンプルに対して4タップの補間フィルタを適用して2/8−画素位置または4/8−画素位置のクロマサンプルを生成する段階と、
前記ルマ参照ピクチャ及び前記クロマ参照ピクチャのうち一つに動きベクトルを適用して前記現在ブロックの予測ブロックを生成する段階を含み、
前記8タップの補間フィルタは8つのフィルタ係数を含み、
前記4タップの補間フィルタは4のフィルタ係数を含むことを特徴とする動き補償方法。 - 前記ルマサンプルを生成する段階は、前記8タップの補間フィルタのフィルタ係数の総和が1になるように決定されたルマスケーリング率を用いて、前記8タップの補間フィルタを適用して生成されたサンプルをスケーリングする段階を含み、
前記クロマサンプルを生成する段階は、前記4タップの補間フィルタのフィルタ係数の総和が1になるように決定されたクロマスケーリング率を用いて、前記4タップの補間フィルタを適用して生成されたサンプルをスケーリングする段階を含み、
前記ルマスケーリング率が64であり、前記クロマスケーリング率が64であることを特徴とする請求項1に記載の動き補償方法。 - 前記ルマサンプルを生成する段階は、前記8タップの補間フィルタを用いて水平方向及び垂直方向のうち少なくとも一方向にフィルタリングを行う段階を含み、
前記クロマサンプルを生成する段階は、前記4タップの補間フィルタを用いて垂直方向及び垂直方向のうち少なくとも一方向にフィルタリングを行う段階を含むことを特徴とする請求項1に記載の動き補償方法。 - 動き補償装置において、
現在ブロックがルマブロックである場合、ルマ参照ピクチャの1/4画素単位のサンプルを決定するために、前記ルマ参照ピクチャの整数画素単位のルマサンプルに対して8タップの補間フィルタを適用して2/4−画素位置のルマサンプルを生成するルマ補間フィルタリング部と、
前記現在ブロックがクロマブロックである場合、クロマ参照ピクチャの1/8画素単位のサンプルを決定するために、前記クロマ参照ピクチャの整数画素単位のクロマサンプルに対して4タップの補間フィルタを適用して2/8−画素位置または4/8−画素位置のクロマサンプルを生成するクロマ補間フィルタリング部と、
前記ルマ参照ピクチャ及び前記クロマ参照ピクチャのうち一つに動きベクトルを適用して前記現在ブロックの予測ブロックを生成する予測ブロック生成部を備え、
前記8タップの補間フィルタは8つのフィルタ係数を含み、
前記4タップの補間フィルタは4つのフィルタ係数を含むことを特徴とする動き補償装置。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US38826410P | 2010-09-30 | 2010-09-30 | |
| US61/388,264 | 2010-09-30 | ||
| US201061426479P | 2010-12-22 | 2010-12-22 | |
| US61/426,479 | 2010-12-22 | ||
| US201161431909P | 2011-01-12 | 2011-01-12 | |
| US61/431,909 | 2011-01-12 | ||
| US201161450775P | 2011-03-09 | 2011-03-09 | |
| US61/450,775 | 2011-03-09 | ||
| PCT/KR2011/007220 WO2012044105A2 (ko) | 2010-09-30 | 2011-09-30 | 평활화 보간 필터를 이용하여 영상을 보간하는 방법 및 그 장치 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014235539A Division JP2015057919A (ja) | 2010-09-30 | 2014-11-20 | 動き補償方法及び動き補償装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013542666A JP2013542666A (ja) | 2013-11-21 |
| JP5654685B2 true JP5654685B2 (ja) | 2015-01-14 |
Family
ID=45893683
Family Applications (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013531498A Active JP5654685B2 (ja) | 2010-09-30 | 2011-09-30 | 動き補償方法及び動き補償装置 |
| JP2014235539A Pending JP2015057919A (ja) | 2010-09-30 | 2014-11-20 | 動き補償方法及び動き補償装置 |
| JP2015127741A Pending JP2015188260A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127740A Pending JP2015165727A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127742A Pending JP2015188261A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127739A Pending JP2015165726A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2017116971A Active JP6902937B2 (ja) | 2010-09-30 | 2017-06-14 | ビデオ復号化方法及びビデオ復号化装置 |
Family Applications After (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014235539A Pending JP2015057919A (ja) | 2010-09-30 | 2014-11-20 | 動き補償方法及び動き補償装置 |
| JP2015127741A Pending JP2015188260A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127740A Pending JP2015165727A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127742A Pending JP2015188261A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2015127739A Pending JP2015165726A (ja) | 2010-09-30 | 2015-06-25 | 動き補償方法及び動き補償装置 |
| JP2017116971A Active JP6902937B2 (ja) | 2010-09-30 | 2017-06-14 | ビデオ復号化方法及びビデオ復号化装置 |
Country Status (18)
| Country | Link |
|---|---|
| US (5) | US9124902B2 (ja) |
| EP (7) | EP2860980B1 (ja) |
| JP (7) | JP5654685B2 (ja) |
| KR (7) | KR101452861B1 (ja) |
| CN (6) | CN104994381B (ja) |
| BR (2) | BR122020014075B1 (ja) |
| CY (4) | CY1119447T1 (ja) |
| DK (4) | DK2996335T3 (ja) |
| ES (4) | ES2640666T3 (ja) |
| HR (4) | HRP20170917T1 (ja) |
| HU (4) | HUE037725T2 (ja) |
| LT (4) | LT2953355T (ja) |
| MX (5) | MX2013003606A (ja) |
| PL (4) | PL2860980T3 (ja) |
| PT (4) | PT2996335T (ja) |
| RS (3) | RS56473B1 (ja) |
| SI (4) | SI2860980T1 (ja) |
| WO (1) | WO2012044105A2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014523185A (ja) * | 2011-06-28 | 2014-09-08 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| US10846846B2 (en) | 2017-08-25 | 2020-11-24 | Nuflare Technology, Inc. | Pattern inspection apparatus and pattern inspection method |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011121716A1 (ja) * | 2010-03-30 | 2011-10-06 | 株式会社 東芝 | 動画像符号化方法、復号化方法、符号化装置および復号化装置 |
| KR101682147B1 (ko) * | 2010-04-05 | 2016-12-05 | 삼성전자주식회사 | 변환 및 역변환에 기초한 보간 방법 및 장치 |
| JP5977235B2 (ja) * | 2010-07-09 | 2016-08-24 | サムスン エレクトロニクス カンパニー リミテッド | 映像補間方法 |
| JP5665508B2 (ja) * | 2010-11-30 | 2015-02-04 | キヤノン株式会社 | 画像処理装置及び方法、並びにプログラム及び記憶媒体 |
| US9264725B2 (en) | 2011-06-24 | 2016-02-16 | Google Inc. | Selection of phase offsets for interpolation filters for motion compensation |
| KR101956284B1 (ko) * | 2011-06-30 | 2019-03-08 | 엘지전자 주식회사 | 보간 방법 및 이를 이용한 예측 방법 |
| US9883203B2 (en) * | 2011-11-18 | 2018-01-30 | Qualcomm Incorporated | Adaptive overlapped block motion compensation |
| DE102011119177A1 (de) * | 2011-11-23 | 2013-05-23 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zum Verfahren zum Erstellen eines ersten Parametersatzes |
| JP5911166B2 (ja) * | 2012-01-10 | 2016-04-27 | シャープ株式会社 | 画像処理装置、画像処理方法、画像処理プログラム、撮像装置、及び画像表示装置 |
| US8675102B2 (en) * | 2012-06-08 | 2014-03-18 | Apple Inc. | Real time denoising of video |
| US20140078394A1 (en) * | 2012-09-17 | 2014-03-20 | General Instrument Corporation | Selective use of chroma interpolation filters in luma interpolation process |
| WO2014107066A1 (ko) * | 2013-01-04 | 2014-07-10 | 삼성전자 주식회사 | 위상차를 고려한 영상 업샘플링을 이용하는 스케일러블 비디오 부호화 방법 및 장치, 스케일러블 비디오 복호화 방법 및 장치 |
| AU2014227060B2 (en) * | 2013-03-07 | 2017-04-06 | Japan Oil, Gas And Metals National Corporation | Image processing device, method for image processing, and image processing program |
| DE102013219737B4 (de) | 2013-09-30 | 2019-05-09 | Siemens Healthcare Gmbh | Angiographisches Untersuchungsverfahren eines Gefäßsystems |
| JP2015144423A (ja) * | 2013-12-25 | 2015-08-06 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 画像符号化装置、画像復号化装置、それらの方法、プログラム及び画像処理システム |
| WO2015149699A1 (en) * | 2014-04-01 | 2015-10-08 | Mediatek Inc. | Method of adaptive interpolation filtering in video coding |
| KR102440941B1 (ko) | 2015-03-03 | 2022-09-05 | 삼성전자주식회사 | 이미지 처리 정보에 따라 크기와 방향을 갖는 초기 위상을 계산할 수 있는 이미지 처리 장치들 |
| KR102402671B1 (ko) | 2015-09-09 | 2022-05-26 | 삼성전자주식회사 | 보간 필터의 연산 복잡도를 조절할 수 있는 영상 처리 장치, 영상 보간 방법 및 영상 부호화 방법 |
| GB201516670D0 (en) * | 2015-09-21 | 2015-11-04 | Taranis Visual | Method and system for interpolating data |
| CN108028937B (zh) | 2015-09-25 | 2020-07-24 | 华为技术有限公司 | 视频运动补偿装置和方法 |
| RU2696309C1 (ru) * | 2015-09-25 | 2019-08-01 | Хуавэй Текнолоджиз Ко., Лтд. | Устройство и способ компенсации движения видео |
| WO2017052405A1 (en) * | 2015-09-25 | 2017-03-30 | Huawei Technologies Co., Ltd. | Apparatus and method for video motion compensation |
| AU2015410095C1 (en) | 2015-09-25 | 2020-01-16 | Huawei Technologies Co., Ltd. | Adaptive sharpening filter for predictive coding |
| CN107925772B (zh) * | 2015-09-25 | 2020-04-14 | 华为技术有限公司 | 利用可选插值滤波器进行视频运动补偿的装置和方法 |
| MX2018006091A (es) | 2015-11-17 | 2018-11-09 | Awei Tech Co Ltd | Metodo y aparato para filtracion adaptativa de muestras para codificacion de video. |
| US10009622B1 (en) | 2015-12-15 | 2018-06-26 | Google Llc | Video coding with degradation of residuals |
| CN116074532A (zh) | 2016-02-01 | 2023-05-05 | Oppo广东移动通信有限公司 | 预测图像生成装置、运动图像解码装置、以及运动图像编码装置 |
| KR20180042899A (ko) * | 2016-10-19 | 2018-04-27 | 디지털인사이트 주식회사 | 적응적 보간 필터를 사용하는 비디오 코딩 방법 및 장치 |
| WO2018097700A1 (ko) * | 2016-11-28 | 2018-05-31 | 한국전자통신연구원 | 필터링을 위한 방법 및 장치 |
| CN116320494A (zh) | 2016-11-28 | 2023-06-23 | 韩国电子通信研究院 | 用于滤波的方法和装置 |
| WO2018132150A1 (en) * | 2017-01-13 | 2018-07-19 | Google Llc | Compound prediction for video coding |
| CN110583021B (zh) * | 2017-01-31 | 2023-06-02 | 夏普株式会社 | 用于执行平面帧内预测视频编码的系统和方法 |
| US10499078B1 (en) * | 2017-02-07 | 2019-12-03 | Google Llc | Implicit motion compensation filter selection |
| KR102511546B1 (ko) * | 2017-02-24 | 2023-03-17 | 주식회사 케이티 | 비디오 신호 처리 방법 및 장치 |
| US10440396B2 (en) * | 2017-03-28 | 2019-10-08 | Qualcomm Incorporated | Filter information sharing among color components |
| WO2019065537A1 (ja) * | 2017-09-28 | 2019-04-04 | シャープ株式会社 | 動き補償フィルタ装置、画像復号装置および動画像符号化装置 |
| SG11202003260WA (en) * | 2017-11-07 | 2020-05-28 | Huawei Tech Co Ltd | Interpolation filter for an inter prediction apparatus and method for video coding |
| KR102424189B1 (ko) * | 2018-02-14 | 2022-07-21 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 적응형 보간 필터 |
| US20190273946A1 (en) * | 2018-03-05 | 2019-09-05 | Markus Helmut Flierl | Methods and Arrangements for Sub-Pel Motion-Adaptive Image Processing |
| WO2019190342A1 (en) | 2018-03-29 | 2019-10-03 | Huawei Technologies Co., Ltd | Image processing apparatus and method |
| TWI677233B (zh) * | 2018-08-02 | 2019-11-11 | 瑞昱半導體股份有限公司 | 決定濾波器係數的方法 |
| SG11202103441TA (en) * | 2018-10-06 | 2021-05-28 | Huawei Tech Co Ltd | Method and apparatus for intra prediction using an interpolation filter |
| AU2020235190B2 (en) | 2019-03-08 | 2023-06-01 | Beijing Bytedance Network Technology Co., Ltd. | Constraints on model-based reshaping in video processing |
| BR112021019260A2 (pt) | 2019-03-28 | 2021-11-30 | Huawei Tech Co Ltd | Método e aparelho para suavização intra |
| CN117528068A (zh) | 2019-04-18 | 2024-02-06 | 北京字节跳动网络技术有限公司 | 视频编解码中的跨分量模式中的选择性使用 |
| EP3935855A4 (en) | 2019-04-23 | 2022-09-21 | Beijing Bytedance Network Technology Co., Ltd. | METHOD OF CROSS-COMPONENT DEPENDENCE REDUCTION |
| EP3949395A4 (en) | 2019-05-08 | 2022-06-29 | Beijing Bytedance Network Technology Co., Ltd. | Conditions for applicability of cross-component coding |
| CN117478908A (zh) | 2019-06-22 | 2024-01-30 | 北京字节跳动网络技术有限公司 | 色度残差缩放的语法元素 |
| CN110351482A (zh) * | 2019-06-25 | 2019-10-18 | 杭州汇萃智能科技有限公司 | 图像预处理装置、方法和一种相机 |
| JP7460748B2 (ja) | 2019-07-07 | 2024-04-02 | 北京字節跳動網絡技術有限公司 | クロマ残差スケーリングのシグナリング |
| JP6797247B2 (ja) * | 2019-07-10 | 2020-12-09 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | ビデオ動き補償用の装置および方法 |
| JP2022548521A (ja) * | 2019-09-23 | 2022-11-21 | アリババ グループ ホウルディング リミテッド | 参照ダウンサンプリングありの動き補償補間のためのフィルタ |
| US20210176486A1 (en) * | 2019-12-09 | 2021-06-10 | Alibaba Group Holding Limited | Methods and apparatuses for motion compensation |
| EP4128755A4 (en) * | 2020-04-29 | 2023-09-06 | Huawei Technologies Co., Ltd. | METHOD AND DEVICE FOR INTERPOLATION FILTERING UNDERSAMPLING |
| US20240171757A1 (en) * | 2021-03-31 | 2024-05-23 | Telefonaktiebolaget Lm Ericsson (Publ) | Smooth surface prediction |
| US20230179763A1 (en) * | 2021-12-06 | 2023-06-08 | Tencent America LLC | Interpolation Filters for Adaptive Motion Vector Difference Resolution |
| WO2023200135A1 (ko) * | 2022-04-15 | 2023-10-19 | 현대자동차주식회사 | 크로마 성분에 대한 개선된 인루프필터를 이용하는 비디오 코딩을 위한 방법 및 장치 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07266331A (ja) * | 1994-03-30 | 1995-10-17 | Hitachi Chem Co Ltd | 単結晶の切断方法 |
| JP3637740B2 (ja) * | 1997-08-25 | 2005-04-13 | 三菱住友シリコン株式会社 | ワイヤソーおよびインゴット切断方法 |
| JP3075269B2 (ja) | 1998-10-13 | 2000-08-14 | セイコーエプソン株式会社 | 画像データ補間方法、画像データ補間装置および画像データ補間プログラムを記録した媒体 |
| US6768817B1 (en) | 1999-09-03 | 2004-07-27 | Truong, T.K./ Chen, T.C. | Fast and efficient computation of cubic-spline interpolation for data compression |
| JP2003509748A (ja) * | 1999-09-03 | 2003-03-11 | チェン,ティー.シー. | データ圧縮のための3次スプライン補間の高速で効率のよい計算方法 |
| DE10055286A1 (de) * | 2000-11-08 | 2002-05-23 | Freiberger Compound Mat Gmbh | Vorrichtung und Verfahren zum Trennen von Werkstoffen |
| DE10122628B4 (de) * | 2001-05-10 | 2007-10-11 | Siltronic Ag | Verfahren zum Abtrennen von Scheiben von einem Werkstück |
| JP4120301B2 (ja) * | 2002-04-25 | 2008-07-16 | ソニー株式会社 | 画像処理装置およびその方法 |
| SG140441A1 (en) * | 2003-03-17 | 2008-03-28 | St Microelectronics Asia | Decoder and method of decoding using pseudo two pass decoding and one pass encoding |
| US7724827B2 (en) | 2003-09-07 | 2010-05-25 | Microsoft Corporation | Multi-layer run level encoding and decoding |
| KR101038822B1 (ko) | 2003-09-07 | 2011-06-03 | 마이크로소프트 코포레이션 | 인터레이스형 비디오의 코딩 및 디코딩 |
| US8165389B2 (en) | 2004-03-15 | 2012-04-24 | Microsoft Corp. | Adaptive interpolation with artifact reduction of images |
| US7502505B2 (en) | 2004-03-15 | 2009-03-10 | Microsoft Corporation | High-quality gradient-corrected linear interpolation for demosaicing of color images |
| US7623575B2 (en) * | 2005-01-05 | 2009-11-24 | Lsi Corporation | Method and apparatus for sub-pixel motion compensation |
| KR20070055212A (ko) | 2005-11-25 | 2007-05-30 | 삼성전자주식회사 | 프레임 보간장치, 프레임 보간방법 및 움직임 신뢰성평가장치 |
| CN100566413C (zh) * | 2006-06-05 | 2009-12-02 | 华为技术有限公司 | 一种自适应插值处理方法及编解码模块 |
| US9014280B2 (en) | 2006-10-13 | 2015-04-21 | Qualcomm Incorporated | Video coding with adaptive filtering for motion compensated prediction |
| JP2008118447A (ja) | 2006-11-06 | 2008-05-22 | Canon Inc | 画像形成装置及び画像形成方法ならびにそのプログラム |
| CN101212672B (zh) * | 2006-12-30 | 2011-01-05 | 安凯(广州)微电子技术有限公司 | 视频内容自适应的亚像素插值方法和装置 |
| KR101369746B1 (ko) * | 2007-01-22 | 2014-03-07 | 삼성전자주식회사 | 적응적 보간 필터를 이용한 영상 부호화, 복호화 방법 및장치 |
| EP2048886A1 (en) * | 2007-10-11 | 2009-04-15 | Panasonic Corporation | Coding of adaptive interpolation filter coefficients |
| KR101418116B1 (ko) * | 2007-10-24 | 2014-07-09 | 고려대학교 산학협력단 | 프레임 보간 장치 및 그를 포함한 프레임 속도 상향 변환장치 |
| JP4988627B2 (ja) * | 2008-03-05 | 2012-08-01 | ルネサスエレクトロニクス株式会社 | フィルタ演算器及び動き補償装置 |
| CN102057680A (zh) * | 2008-07-04 | 2011-05-11 | 株式会社东芝 | 运动图像编码/解码方法和装置 |
| US8610673B2 (en) * | 2008-12-03 | 2013-12-17 | Microsoft Corporation | Manipulation of list on a multi-touch display |
| US8761268B2 (en) * | 2009-04-06 | 2014-06-24 | Intel Corporation | Selective local adaptive wiener filter for video coding and decoding |
| WO2011086672A1 (ja) * | 2010-01-13 | 2011-07-21 | 株式会社 東芝 | 動画像符号化装置および復号装置 |
| JP5977235B2 (ja) * | 2010-07-09 | 2016-08-24 | サムスン エレクトロニクス カンパニー リミテッド | 映像補間方法 |
| US20120134425A1 (en) * | 2010-11-29 | 2012-05-31 | Faouzi Kossentini | Method and System for Adaptive Interpolation in Digital Video Coding |
| PL2658263T3 (pl) * | 2010-12-22 | 2023-03-13 | Lg Electronics Inc. | Sposób predykcji wewnątrzramkowej i urządzenie wykorzystujące ten sposób |
| US20120230423A1 (en) * | 2011-03-10 | 2012-09-13 | Esenlik Semih | Line memory reduction for video coding and decoding |
-
2011
- 2011-09-30 SI SI201131230T patent/SI2860980T1/sl unknown
- 2011-09-30 PT PT151736063T patent/PT2996335T/pt unknown
- 2011-09-30 PL PL14193524T patent/PL2860980T3/pl unknown
- 2011-09-30 EP EP14193524.7A patent/EP2860980B1/en active Active
- 2011-09-30 SI SI201131338T patent/SI2996335T1/sl unknown
- 2011-09-30 PL PL15173605T patent/PL2953355T3/pl unknown
- 2011-09-30 CN CN201510377329.4A patent/CN104994381B/zh active Active
- 2011-09-30 LT LTEP15173605.5T patent/LT2953355T/lt unknown
- 2011-09-30 RS RS20171115A patent/RS56473B1/sr unknown
- 2011-09-30 EP EP15173606.3A patent/EP2996335B1/en active Active
- 2011-09-30 PL PL15173607T patent/PL2996336T3/pl unknown
- 2011-09-30 EP EP23216198.4A patent/EP4318277A3/en active Pending
- 2011-09-30 SI SI201131217A patent/SI2953355T1/sl unknown
- 2011-09-30 SI SI201131291T patent/SI2996336T1/sl unknown
- 2011-09-30 EP EP15173607.1A patent/EP2996336B1/en active Active
- 2011-09-30 WO PCT/KR2011/007220 patent/WO2012044105A2/ko active Application Filing
- 2011-09-30 DK DK15173606.3T patent/DK2996335T3/da active
- 2011-09-30 CN CN201510373683.XA patent/CN104980738B/zh active Active
- 2011-09-30 DK DK15173607.1T patent/DK2996336T3/en active
- 2011-09-30 LT LTEP15173607.1T patent/LT2996336T/lt unknown
- 2011-09-30 RS RS20170915A patent/RS56359B1/sr unknown
- 2011-09-30 PT PT151736071T patent/PT2996336T/pt unknown
- 2011-09-30 EP EP11829611.0A patent/EP2624558A4/en not_active Withdrawn
- 2011-09-30 EP EP17187373.0A patent/EP3276961A1/en active Pending
- 2011-09-30 ES ES15173607.1T patent/ES2640666T3/es active Active
- 2011-09-30 HU HUE15173607A patent/HUE037725T2/hu unknown
- 2011-09-30 DK DK15173605.5T patent/DK2953355T3/da active
- 2011-09-30 PL PL15173606T patent/PL2996335T3/pl unknown
- 2011-09-30 PT PT151736055T patent/PT2953355T/pt unknown
- 2011-09-30 LT LTEP15173606.3T patent/LT2996335T/lt unknown
- 2011-09-30 ES ES15173605.5T patent/ES2629870T3/es active Active
- 2011-09-30 BR BR122020014075-5A patent/BR122020014075B1/pt active IP Right Grant
- 2011-09-30 RS RS20170662A patent/RS56176B1/sr unknown
- 2011-09-30 CN CN201510401079.3A patent/CN105049844B/zh active Active
- 2011-09-30 CN CN201180057602.5A patent/CN103238320B/zh not_active Expired - Fee Related
- 2011-09-30 HU HUE15173606A patent/HUE035494T2/en unknown
- 2011-09-30 KR KR1020110100037A patent/KR101452861B1/ko active IP Right Grant
- 2011-09-30 PT PT141935247T patent/PT2860980T/pt unknown
- 2011-09-30 MX MX2013003606A patent/MX2013003606A/es active IP Right Grant
- 2011-09-30 EP EP15173605.5A patent/EP2953355B1/en active Active
- 2011-09-30 LT LTEP14193524.7T patent/LT2860980T/lt unknown
- 2011-09-30 HU HUE15173605A patent/HUE034477T2/en unknown
- 2011-09-30 JP JP2013531498A patent/JP5654685B2/ja active Active
- 2011-09-30 CN CN201510400603.5A patent/CN105049843B/zh active Active
- 2011-09-30 DK DK14193524.7T patent/DK2860980T3/en active
- 2011-09-30 ES ES15173606.3T patent/ES2646306T3/es active Active
- 2011-09-30 BR BR122021005436-3A patent/BR122021005436B1/pt active IP Right Grant
- 2011-09-30 CN CN201510377410.2A patent/CN105072443B/zh active Active
- 2011-09-30 US US13/877,074 patent/US9124902B2/en active Active
- 2011-09-30 ES ES14193524.7T patent/ES2630107T3/es active Active
- 2011-09-30 HU HUE14193524A patent/HUE036401T2/hu unknown
-
2013
- 2013-03-27 MX MX2015008363A patent/MX336877B/es unknown
- 2013-03-27 MX MX2015008364A patent/MX339850B/es unknown
- 2013-03-27 MX MX2015008365A patent/MX339849B/es unknown
- 2013-03-27 MX MX2015008366A patent/MX339848B/es unknown
-
2014
- 2014-05-07 KR KR1020140054354A patent/KR101539235B1/ko active IP Right Grant
- 2014-09-03 KR KR1020140117033A patent/KR101657537B1/ko active IP Right Grant
- 2014-10-29 KR KR1020140148730A patent/KR101658806B1/ko active IP Right Grant
- 2014-11-20 JP JP2014235539A patent/JP2015057919A/ja active Pending
-
2015
- 2015-02-26 US US14/632,176 patent/US9253507B2/en active Active
- 2015-02-26 US US14/632,169 patent/US9277247B2/en active Active
- 2015-02-26 US US14/632,132 patent/US9118933B1/en active Active
- 2015-02-26 US US14/632,155 patent/US9179167B2/en active Active
- 2015-03-12 KR KR1020150034526A patent/KR101707610B1/ko active IP Right Grant
- 2015-03-12 KR KR1020150034524A patent/KR101658807B1/ko active IP Right Grant
- 2015-03-12 KR KR1020150034525A patent/KR101658808B1/ko active IP Right Grant
- 2015-06-25 JP JP2015127741A patent/JP2015188260A/ja active Pending
- 2015-06-25 JP JP2015127740A patent/JP2015165727A/ja active Pending
- 2015-06-25 JP JP2015127742A patent/JP2015188261A/ja active Pending
- 2015-06-25 JP JP2015127739A patent/JP2015165726A/ja active Pending
-
2017
- 2017-06-14 HR HRP20170917TT patent/HRP20170917T1/hr unknown
- 2017-06-14 JP JP2017116971A patent/JP6902937B2/ja active Active
- 2017-06-28 HR HRP20170981TT patent/HRP20170981T1/hr unknown
- 2017-06-29 CY CY20171100693T patent/CY1119447T1/el unknown
- 2017-08-11 CY CY20171100867T patent/CY1119203T1/el unknown
- 2017-09-14 HR HRP20171386TT patent/HRP20171386T1/hr unknown
- 2017-09-27 CY CY20171101021T patent/CY1119450T1/el unknown
- 2017-11-02 HR HRP20171672TT patent/HRP20171672T1/hr unknown
- 2017-12-07 CY CY20171101292T patent/CY1119672T1/el unknown
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014523185A (ja) * | 2011-06-28 | 2014-09-08 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| JP5921794B1 (ja) * | 2011-06-28 | 2016-05-24 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| JP5921793B1 (ja) * | 2011-06-28 | 2016-05-24 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| JP2016129380A (ja) * | 2011-06-28 | 2016-07-14 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| JP2016129377A (ja) * | 2011-06-28 | 2016-07-14 | サムスン エレクトロニクス カンパニー リミテッド | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 |
| US10846846B2 (en) | 2017-08-25 | 2020-11-24 | Nuflare Technology, Inc. | Pattern inspection apparatus and pattern inspection method |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5654685B2 (ja) | 動き補償方法及び動き補償装置 | |
| JP6114419B2 (ja) | 非対称形の補間フィルタを利用して、映像を補間する方法及びその装置 | |
| JP2013542667A (ja) | 映像のイントラ予測方法及びその装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140128 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140428 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140508 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140527 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140603 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140627 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5654685 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |