JP5544238B2 - 試料ステージ - Google Patents
試料ステージ Download PDFInfo
- Publication number
- JP5544238B2 JP5544238B2 JP2010169972A JP2010169972A JP5544238B2 JP 5544238 B2 JP5544238 B2 JP 5544238B2 JP 2010169972 A JP2010169972 A JP 2010169972A JP 2010169972 A JP2010169972 A JP 2010169972A JP 5544238 B2 JP5544238 B2 JP 5544238B2
- Authority
- JP
- Japan
- Prior art keywords
- plate
- driving
- drive mechanism
- sample stage
- top table
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Description
f=kx …(式1)
(制御したい周波数)<(制御帯域)<(弾性ヒンジ固有振動数)<(圧電素子応答周波数)を満たすように設計する。
(圧電素子可動範囲)>(押し当てギャップ量)>(振動抑制可動範囲)
を満たすように設計すればよい。
3 制御装置
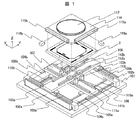
101 ベース
102 Xモータ固定子
103 Xモータ可動子
104 Yモータ固定子
105 Yモータ可動子
106 Xテーブル
107 Yテーブル
108 サブテーブル
109a,b Xガイド
110a,b Yガイド
111 Xサブガイド
112 Yサブガイド
113 連結部材
114 トップテーブル
115 バーミラー
116 レーザ干渉計
117 ウェハホルダ
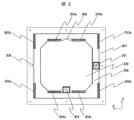
201 圧電素子X
202 圧電素子Y
203 X弾性支持部
204 Y弾性支持部
205 固定部材
206 中間部材
207 移動部材
208 押し当て部材X
209 押し当て部材Y
Claims (10)
- テーブルを第1の方向に駆動する第1の駆動機構と、当該テーブルを前記第1の方向に直交する方向に駆動する第2の駆動機構と、試料を載置するトップテーブルを備えた試料ステージにおいて、
前記テーブルとトップテーブルの間に、当該トップテーブルを支持する支持部材を備え、当該支持部材は、当該支持部材の外枠を形成する第1の部分と、当該第1の部分の内側に配置される第2の部分と、当該第2の部分の更に内側に配置される第3の部分を有し、前記第1の部分と第2の部分を連結すると共に、前記第1の方向と比較して、第2の方向の長さが長い第1の板状体と、前記第2の部分と第3の部分を連結すると共に、前記第2の方向と比較して、第1の方向の長さが長い第2の板状体と、前記第1の部分を、前記第2の部分に対し前記第1の方向に駆動する第3の駆動機構と、前記第2の部分を前記第3の部分に対し前記第2の方向へ駆動する第4の駆動機構と、を備え、前記第1の駆動機構及び前記第2の駆動機構の少なくとも1つによる駆動が行われているときに、前記第3の駆動機構及び前記第4の駆動機構の少なくとも1つの駆動によって、前記第1の部分を前記第2の部分に押し当てるような押圧、及び前記第2の部分を前記第3の部分に押し当てるような押圧の少なくとも1つを実行することを特徴とする試料ステージ。 - 請求項1において、
前記第1の板状体は、前記第1の方向と第2の方向に直交する第3の方向の長さが、前記第1の方向と比較して長く、及び前記第2の板状体は、前記第3の方向の長さが、前記第2の方向と比較して長く形成されることを特徴とする試料ステージ。 - 請求項2において、
前記第1の板状体は、その板部が前記第1の方向に積層する蛇腹状に形成され、前記第2の板状体は、その板部が前記第2の方向に積層する蛇腹状に形成されることを特徴とする試料ステージ。 - 請求項2において、
前記第1の板状体は、前記第1の方向に対し、相対的に第2の方向の動作を規制するように形成され、前記第2の板状体は、前記第2の方向に対し、相対的に第1の方向の移動を規制するように形成されていることを特徴とする試料ステージ。 - 請求項1において、
前記第1の板状体、及び第2の板状体は、弾性ヒンジ構造を有することを特徴とする試料ステージ。 - 請求項1において、
前記第1の板状体は前記第1の部分と第2の部分との間に複数設けられ、前記第2の板状体は前記第2の部分と第3の部分との間に複数設けられることを特徴とする試料ステージ。 - 請求項6において、
前記複数の第1の板状体は、前記第1の部分の内側部に設けられると共に、前記第2の方向に延びると共に、当該第1の部分における第1の方向の中心を通過する仮想直線を中心とした対称位置に配置され、前記複数の第2の板状体は、前記第2の部分の内側部に設けられると共に、前記第1の方向に延びると共に、当該第2の部分における第2の方向の中心を通過する仮想直線を中心とした対称位置に配置されることを特徴とする試料ステージ。 - 請求項1において、
前記第3の駆動機構によって押圧される前記第2の部分の前記第1の部分との接触部に、押し当て部材を設け、前記第4の駆動機構によって押圧される前記第3の部分の前記第1の部分との接触部に、押し当て部材を設けてなることを特徴とする試料ステージ。 - 請求項1において、
前記第3の駆動機構、及び第4の駆動機構は、前記第1の駆動機構、及び第2の駆動機構による前記トップテーブルの移動の移動時間に、当該トップテーブルの移動停止時と比較して、強く前記第2の部分、及び第3の部分を押圧することを特徴とする試料ステージ。 - テーブルを第1の方向に駆動する第1の駆動機構と、当該テーブルを前記第1の方向に直交する第2の方向に駆動する第2の駆動機構と、試料を載置するトップテーブルを備えた試料ステージにおいて、
前記テーブルとトップテーブルの間に、当該トップテーブルを支持する支持部材を備え、
当該支持部材は、当該支持部材の外枠を形成する第1の部分と、当該第1の部分の内側に配置される第2の部分と、当該第2の部分の更に内側に配置される第3の部分を有し、前記第1の部分を、前記第2の部分に対し前記第1の方向に、第2の方向への移動を規制しつつ駆動する第3の駆動機構と、前記第2の部分を、前記第3の部分に対し前記第2の方向に、第1の方向への移動を規制しつつ駆動する第4の駆動機構を備え、前記第1の駆動機構及び前記第2の駆動機構の少なくとも1つによる駆動が行われているときに、前記第3の駆動機構及び前記第4の駆動機構の少なくとも1つの駆動によって、前記第1の部分を前記第2の部分に押し当てるような押圧、及び前記第2の部分を前記第3の部分に押し当てるような押圧の少なくとも1つを実行することを特徴とする試料ステージ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010169972A JP5544238B2 (ja) | 2010-07-29 | 2010-07-29 | 試料ステージ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010169972A JP5544238B2 (ja) | 2010-07-29 | 2010-07-29 | 試料ステージ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012033301A JP2012033301A (ja) | 2012-02-16 |
| JP5544238B2 true JP5544238B2 (ja) | 2014-07-09 |
Family
ID=45846516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010169972A Expired - Fee Related JP5544238B2 (ja) | 2010-07-29 | 2010-07-29 | 試料ステージ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5544238B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3124617B2 (ja) * | 1992-05-01 | 2001-01-15 | キヤノン株式会社 | 微動駆動機構 |
| JP3255707B2 (ja) * | 1992-06-02 | 2002-02-12 | 日立建機株式会社 | 微細位置決め装置 |
| JP2001289274A (ja) * | 2000-04-06 | 2001-10-19 | Techno Quartz Kk | 脆性材料製バネおよびその製造方法 |
| JP2009252809A (ja) * | 2008-04-02 | 2009-10-29 | Hitachi High-Technologies Corp | ステージ装置及びステージ装置におけるステージの位置決め制御方法 |
| JP2010123354A (ja) * | 2008-11-18 | 2010-06-03 | Hitachi High-Technologies Corp | 荷電粒子線装置 |
-
2010
- 2010-07-29 JP JP2010169972A patent/JP5544238B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012033301A (ja) | 2012-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5881377B2 (ja) | 試料位置決め装置、試料ステージ、荷電粒子線装置 | |
| JP4936934B2 (ja) | ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法 | |
| JP3919560B2 (ja) | 振動制御装置及び振動制御方法及び露光装置及びデバイスの製造方法 | |
| JP3814453B2 (ja) | 位置決め装置、半導体露光装置およびデバイス製造方法 | |
| JP5834171B2 (ja) | 形状測定装置 | |
| US20090236540A1 (en) | Stage and electron microscope apparatus | |
| Csencsics et al. | Integration of control design and system operation of a high performance piezo-actuated fast steering mirror | |
| KR101788898B1 (ko) | 위치 계측 장치 및 패턴 형성 장치 | |
| US9791018B2 (en) | Vibration isolation apparatus, method of isolating vibration, lithography apparatus, and method of producing device | |
| WO2018020625A1 (ja) | 荷電粒子線装置 | |
| JP4386293B2 (ja) | 振動制御装置及び振動制御方法及び露光装置及びデバイスの製造方法 | |
| JP5953177B2 (ja) | 試料ステージ及び荷電粒子装置 | |
| JP2005297109A (ja) | 微動ステージ | |
| JP5331597B2 (ja) | ステージ装置及びステージ位置決め制御方法 | |
| JP5544238B2 (ja) | 試料ステージ | |
| Kim et al. | Metrological atomic force microscope using a large range scanning dual stage | |
| CN118391399B (zh) | 一种多自由度精密隔振装置及精密光学元件检测系统 | |
| JP6214946B2 (ja) | アクティブブレーキ、アクティブブレーキを備えた試料ステージ、及び荷電粒子線装置 | |
| JP6172913B2 (ja) | ステージ装置、露光装置および物品の製造方法 | |
| JP5090392B2 (ja) | ステージ装置 | |
| KR20260010313A (ko) | 스테이지 장치 및 그것을 사용한 하전 입자선 장치 | |
| JP2023159700A (ja) | ステージ装置、荷電粒子線装置、及び光学式検査装置 | |
| Shen et al. | Control of a long-stroke precision scanning stage | |
| JP2005150616A (ja) | 微動ステージ | |
| JP2003324056A (ja) | 振動抑制装置及びその制御方法、露光装置、半導体デバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120517 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140512 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5544238 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |