JP5453404B2 - 表面筋電図検査及び関節可動域検査を行うためのシステム - Google Patents
表面筋電図検査及び関節可動域検査を行うためのシステム Download PDFInfo
- Publication number
- JP5453404B2 JP5453404B2 JP2011512562A JP2011512562A JP5453404B2 JP 5453404 B2 JP5453404 B2 JP 5453404B2 JP 2011512562 A JP2011512562 A JP 2011512562A JP 2011512562 A JP2011512562 A JP 2011512562A JP 5453404 B2 JP5453404 B2 JP 5453404B2
- Authority
- JP
- Japan
- Prior art keywords
- patient
- semg
- joint
- along
- hub
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000033001 locomotion Effects 0.000 title claims description 23
- 238000002567 electromyography Methods 0.000 title claims description 6
- 238000012360 testing method Methods 0.000 title description 49
- 238000005259 measurement Methods 0.000 claims description 112
- 230000003068 static effect Effects 0.000 claims description 58
- 230000000007 visual effect Effects 0.000 claims description 23
- 210000003205 muscle Anatomy 0.000 claims description 20
- 238000000034 method Methods 0.000 claims description 18
- 230000036982 action potential Effects 0.000 claims description 16
- 210000004872 soft tissue Anatomy 0.000 claims description 16
- 230000000451 tissue damage Effects 0.000 claims description 16
- 231100000827 tissue damage Toxicity 0.000 claims description 16
- 238000004891 communication Methods 0.000 claims description 10
- 208000026137 Soft tissue injury Diseases 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 6
- 238000012545 processing Methods 0.000 claims description 6
- 238000007689 inspection Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 15
- 210000002683 foot Anatomy 0.000 description 9
- 230000006378 damage Effects 0.000 description 7
- 239000004020 conductor Substances 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 4
- 210000001624 hip Anatomy 0.000 description 4
- 229910021607 Silver chloride Inorganic materials 0.000 description 3
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 3
- 229910052737 gold Inorganic materials 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 239000004332 silver Substances 0.000 description 3
- HKZLPVFGJNLROG-UHFFFAOYSA-M silver monochloride Chemical compound [Cl-].[Ag+] HKZLPVFGJNLROG-UHFFFAOYSA-M 0.000 description 3
- 230000005236 sound signal Effects 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 241000953555 Theama Species 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 230000011664 signaling Effects 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 210000003423 ankle Anatomy 0.000 description 1
- 210000000617 arm Anatomy 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 210000003195 fascia Anatomy 0.000 description 1
- 210000003811 finger Anatomy 0.000 description 1
- 210000000245 forearm Anatomy 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 210000003041 ligament Anatomy 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 210000003739 neck Anatomy 0.000 description 1
- 210000005036 nerve Anatomy 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 210000005222 synovial tissue Anatomy 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 210000003371 toe Anatomy 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/389—Electromyography [EMG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4538—Evaluating a particular part of the muscoloskeletal system or a particular medical condition
- A61B5/4561—Evaluating static posture, e.g. undesirable back curvature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6823—Trunk, e.g., chest, back, abdomen, hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6825—Hand
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Physical Education & Sports Medicine (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rheumatology (AREA)
- Geometry (AREA)
- Physiology (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Description
本出願は、2008年6月2日に出願された米国仮特許出願第61/058,160号に基づき、その利益を本明細書によって主張する一般特許出願であり、該仮特許出願の開示内容はその全体が引用により本明細書に組み入れられる。
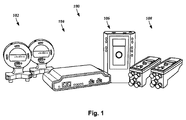
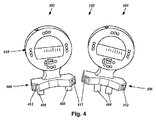
102 傾斜計
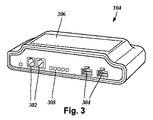
104 ハブ
106 動的sEMGモジュール
108 スキャナ
Claims (10)
- 患者の体内の軟部組織損傷を診断するための軟部組織損傷診断システムであって、
メインユニット及び補助ユニットを含み、前記メインユニットが前記関節近くに位置し、前記補助ユニットが前記患者の関節に沿って動く身体部位に沿って位置するようにして一端が患者の関節に沿って動く患者の身体部位の2つの端部近くに配置されるように構成及び設定されるとともに、患者の制御された前記関節の動作中の前記メインユニットと前記補助ユニットの間に形成される角度を測定するように構成及び設定された1組のハンドヘルド型傾斜計と、
動的表面筋電計(「sEMG」)モジュールと、前記動的sEMGモジュールに電気的に結合された少なくとも1組の測定電極と、
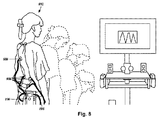
を備え、前記測定電極が、前記関節に沿って動く前記身体部位に沿って前記患者の外部に、前記患者の脊柱の複数のレベルに横方向に近接して結合するように構成及び設定されるとともに、前記患者の制御された前記関節の動作中の前記測定電極の真下にある患者筋群に沿った活動電位を測定し、該測定した活動電位を前記動的sEMGモジュールへ送信するように構成及び設定され、
前記傾斜計及び前記動的sEMGモジュールから収集した、前記患者の制御された前記関節の動作中の前記データを受信し、該受信データを処理して少なくとも1つの表示可能な画像に変えるように構成及び設定されたハブと、
前記処理したデータを前記ハブから受信して表示するように構成及び設定された、前記ハブに電気的に結合された視覚ディスプレイと、
をさらに備えることを特徴とする診断システム。 - 前記傾斜計から収集される前記データと、前記動的sEMGモジュールから収集される前記データとが同時に収集される、
ことを特徴とする請求項1に記載の診断システム。 - 前記ハブに結合された少なくとも1つのプロセッサをさらに備え、該少なくとも1つのプロセッサが、前記受信データを処理して少なくとも1つの表示可能な画像に変えるための追加の処理能力を与えるように構成及び設定される、
ことを特徴とする請求項1に記載の診断システム。 - 前記傾斜計が、各々加速度計を含む、
ことを特徴とする請求項1に記載の診断システム。 - 前記傾斜計が各々円盤形であるとともに、前記傾斜計の底部から接線方向に延びる平坦な底面を有し、個々の傾斜計の平坦な底面が、前記平坦な底面から下方に延びる2本の離間した足部を含み、該2本の足部の少なくとも1本を、前記2本の足の間の空間量を調整するように前記平坦な底面の軸に沿って調整できる、
ことを特徴とする請求項1に記載の診断システム。 - 前記傾斜計が各々、前記傾斜計に沿って位置する、程度マーキングを示すための複数の発光ダイオードを含む、
ことを特徴とする請求項1に記載の診断システム。 - 前記ハブに結合された少なくとも1つの画像取り込み装置をさらに備え、該少なくとも1つの画像取り込み装置が、前記患者の制御された前記関節の動きを行っているビデオ又は少なくとも1つの静止画像の少なくとも一方を取り込むように構成及び設定される、
ことを特徴とする請求項1に記載の診断システム。 - 患者の体内の軟部組織損傷を診断するための軟部組織損傷診断システムであって、
患者の選択した筋群に沿った活動電位を測定するための静的表面筋電図検査(「sEMG」)スキャナであって、前記患者の脊柱に横方向に近接して患者の皮膚に接して配置されるように構成及び設定された、前記静的sEMGスキャナから延びる少なくとも2組の測定電極と、前記少なくとも2組の測定電極から離れて患者の皮膚に接して配置されるように構成及び設定された少なくとも1つの接地とを備える静的sEMGスキャナと、
メインユニット及び補助ユニットを含み、前記メインユニットが前記関節近くに位置し、前記補助ユニットが前記患者の関節に沿って動く身体部位に沿って位置するようにして一端が患者の関節に沿って動く患者の身体部位の2つの端部近くに配置されるように構成及び設定されるとともに、患者の制御された前記関節の動作中の前記メインユニットと前記補助ユニットの間に形成される角度を測定するように構成及び設定された1組のハンドヘルド型傾斜計と、
動的表面筋電計(「sEMG」)モジュールと、前記動的sEMGモジュールに電気的に結合された少なくとも1組の測定電極と、
を備え、前記測定電極が、前記関節に沿って動く前記身体部位に沿って前記患者の外部に、前記患者の脊柱の複数のレベルに横方向に近接して結合するように構成及び設定されるとともに、前記患者の制御された前記関節の動作中の前記測定電極の真下にある患者筋群に沿った活動電位を測定し、該測定した活動電位を前記動的sEMGモジュールへ送信するように構成及び設定され、
前記傾斜計及び前記動的sEMGモジュールから収集した、前記患者の制御された前記関節の動作中の前記データを受信し、該受信データを処理して少なくとも1つの表示可能な画像に変えるように構成及び設定されたハブと、
前記処理したデータを前記ハブから受信して表示するように構成及び設定された、前記ハブに電気的に結合された視覚ディスプレイと、
をさらに備えることを特徴とする診断システム。 - 関節可動域(「ROM」)装置及び動的表面筋電図検査(「sEMG」)装置からのデータを読み取るためのプロセッサ実行可能命令を有するコンピュータ可読媒体であって、前記プロセッサ実行可能命令を装置上にインストールした場合、前記プロセッサ実行可能命令により前記装置が、
患者の身体部位の一端における患者の制御された関節の動作中の、前記ROM装置の前記関節の近くに位置するメインユニットと、前記患者の関節に沿って動く身体部位に沿って位置する補助ユニットとの間で測定される角度を処理するステップと、
前記患者の制御された前記関節の動作中の、前記身体部位に沿った前記患者の複数の脊柱レベルに横方向に近接して患者の皮膚に結合された前記動的sEMG装置の測定電極の真下にある患者筋群に沿って測定される活動電位を処理するステップと、
前記処理したデータを視覚ディスプレイ上に表示するステップと、
を含む動作を実行できるようになる、
ことを特徴とするコンピュータ可読媒体。 - ハブに結合された関節可動域(「ROM」)装置及び動的表面筋電図検査(「sEMG」)装置と、
前記ハブと通信するプロセッサと、
を備え、前記プロセッサが、
患者の身体部位の一端における患者の制御された関節の動作中の、前記ROM装置の前記関節の近くに位置するメインユニットと、前記患者の関節に沿って動く身体部位に沿って位置する補助ユニットとの間で測定される角度を処理するステップと、
前記患者の制御された前記関節の動作中の、前記身体部位に沿った前記患者の複数の脊柱レベルに横方向に近接して患者の皮膚に結合された前記動的sEMG装置の測定電極の真下にある患者筋群に沿って測定される活動電位を処理するステップと、
前記処理したデータを視覚ディスプレイ上に表示するステップと、
を含む動作を可能にするプロセッサ可読命令を実行する、
ことを特徴とする軟部組織損傷診断装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US5816008P | 2008-06-02 | 2008-06-02 | |
| US61/058,160 | 2008-06-02 | ||
| PCT/US2009/045828 WO2009149008A2 (en) | 2008-06-02 | 2009-06-01 | Systems and methods for performing surface electromyography and range-of-motion tests |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013231408A Division JP2014061413A (ja) | 2008-06-02 | 2013-11-07 | 表面筋電図検査及び関節可動域検査を行うためのシステム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011521768A JP2011521768A (ja) | 2011-07-28 |
| JP2011521768A5 JP2011521768A5 (ja) | 2012-05-31 |
| JP5453404B2 true JP5453404B2 (ja) | 2014-03-26 |
Family
ID=41380661
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011512562A Expired - Fee Related JP5453404B2 (ja) | 2008-06-02 | 2009-06-01 | 表面筋電図検査及び関節可動域検査を行うためのシステム |
| JP2013231408A Pending JP2014061413A (ja) | 2008-06-02 | 2013-11-07 | 表面筋電図検査及び関節可動域検査を行うためのシステム及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013231408A Pending JP2014061413A (ja) | 2008-06-02 | 2013-11-07 | 表面筋電図検査及び関節可動域検査を行うためのシステム及び方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US9808172B2 (ja) |
| EP (2) | EP2666410B1 (ja) |
| JP (2) | JP5453404B2 (ja) |
| KR (2) | KR101508822B1 (ja) |
| CN (1) | CN102046079B (ja) |
| AU (1) | AU2009256441B2 (ja) |
| DK (1) | DK2296545T3 (ja) |
| HK (1) | HK1157171A1 (ja) |
| WO (1) | WO2009149008A2 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8117047B1 (en) | 2007-04-16 | 2012-02-14 | Insight Diagnostics Inc. | Healthcare provider organization |
| EP2242453B1 (en) | 2008-02-20 | 2018-11-28 | Mako Surgical Corp. | Implant planning using corrected captured joint motion information |
| US11557073B2 (en) | 2008-06-02 | 2023-01-17 | Precision Biometrics, Inc. | System for generating medical diagnostic images |
| EP2241246A1 (en) * | 2009-04-14 | 2010-10-20 | Koninklijke Philips Electronics N.V. | Using muscle tension sensing to locate an analyte measurement site on the skin |
| WO2012040390A2 (en) | 2010-09-21 | 2012-03-29 | Somaxis Incorporated | Methods for assessing and optimizing muscular performance |
| US20120143064A1 (en) | 2010-11-05 | 2012-06-07 | Charles Dean Cyphery | Muscle function evaluating system |
| DE102010051519A1 (de) * | 2010-11-15 | 2012-05-16 | Zebris Medical Gmbh | Abbildungsvorrichtung zur großflächigen Abbildung eines Körperabschnitts |
| US9936891B2 (en) * | 2011-06-08 | 2018-04-10 | Precision Biometrics, Inc. | Systems and methods for providing biometric related to performance of a physical movement |
| KR101884434B1 (ko) * | 2011-12-02 | 2018-08-02 | (주)아모레퍼시픽 | 한라송이풀 추출물을 함유하는 피부 외용제 조성물 |
| US20140191880A1 (en) * | 2013-01-10 | 2014-07-10 | Covidien Lp | System, method, and software for ambulatory patient monitoring |
| EP2967339B1 (en) | 2013-03-15 | 2019-11-20 | Biogen MA Inc. | Assessment of labeled probes in a subject |
| CN103222866B (zh) * | 2013-04-09 | 2014-12-17 | 北京航空航天大学 | 人体上肢舒适作业范围测量装置 |
| US20150126893A1 (en) * | 2013-11-01 | 2015-05-07 | Maryrose Cusimano Reaston | Method For Determining If Surgically-Implanted Hardware Should Be Removed |
| KR101602704B1 (ko) * | 2014-08-07 | 2016-03-11 | 한국 한의학 연구원 | 척추 질환 판단 장치 및 방법 |
| CA2959758C (en) | 2014-09-04 | 2024-03-12 | Heinz HOENECKE | Shoulder monitoring and treatment system |
| JP6325482B2 (ja) * | 2015-04-06 | 2018-05-16 | バンドー化学株式会社 | 静電容量型センサシート及びセンサ装置 |
| WO2017053788A1 (en) | 2015-09-25 | 2017-03-30 | Biogen Ma Inc. | Wearable medical detector |
| WO2017189748A1 (en) * | 2016-04-29 | 2017-11-02 | Freer Logic, Inc. | Non-contact body and head-based monitoring of brain electrical activity |
| CN107518895B (zh) * | 2016-06-22 | 2020-07-17 | 宁波工程学院 | 面向康复训练的同一肌肉检测方法 |
| US11660054B2 (en) | 2016-11-22 | 2023-05-30 | Biogen Ma Inc. | Medical diagnostic and treatment systems and their methods of use |
| RU2700261C1 (ru) * | 2018-03-14 | 2019-09-13 | Федеральное Государственное бюджетное образовательное учреждение высшего образования Дагестанский государственный медицинский университет Министерства здравоохранения Российской Федерации Даггосмедуниверситет | Способ дифференциальной диагностики мышечной гипотонии центрального и первично-мышечного генеза у детей раннего возраста |
| CN109394226A (zh) * | 2018-09-05 | 2019-03-01 | 李松波 | 一种人体柔韧素质评测训练设备及评测方法 |
| US20220125332A1 (en) * | 2020-10-26 | 2022-04-28 | Nazmi Peyman | Miniature wearable capnography device |
| CN113627401A (zh) * | 2021-10-12 | 2021-11-09 | 四川大学 | 融合双注意力机制的特征金字塔网络的肌电手势识别方法 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4320767A (en) * | 1980-04-07 | 1982-03-23 | Villa Real Antony Euclid C | Pocket-size electronic cuffless blood pressure and pulse rate calculator with optional temperature indicator, timer and memory |
| US4492029A (en) * | 1982-05-06 | 1985-01-08 | Jeco Company Limited | Inclinometer |
| US4664130A (en) | 1985-06-06 | 1987-05-12 | Diagnospine Research Inc. | Method and equipment for the detection of mechanical injuries in the lumbar spine of a patient |
| US5215100A (en) * | 1991-04-29 | 1993-06-01 | Occupational Preventive Diagnostic, Inc. | Nerve condition monitoring system and electrode supporting structure |
| US5369416A (en) * | 1992-06-17 | 1994-11-29 | Indikon Company, Inc. | Multi-color bargraph |
| US5299572A (en) | 1992-10-30 | 1994-04-05 | University Of British Columbia | Biological electrode array |
| US5588444A (en) * | 1992-11-19 | 1996-12-31 | Petragallo; Michael R. | Human range of motion measurement system |
| US5459676A (en) * | 1993-12-01 | 1995-10-17 | Livingston; J. Tracy | Self contained dual inclinometer system |
| US5513651A (en) | 1994-08-17 | 1996-05-07 | Cusimano; Maryrose | Integrated movement analyzing system |
| US5462065A (en) * | 1994-08-17 | 1995-10-31 | Cusimano; Maryrose | Integrated movement analyziing system |
| US6004312A (en) * | 1997-04-15 | 1999-12-21 | Paraspinal Diagnostic Corporation | Computerized EMG diagnostic system |
| US6047202A (en) * | 1997-04-15 | 2000-04-04 | Paraspinal Diagnostic Corporation | EMG electrode |
| US6745062B1 (en) * | 1998-10-05 | 2004-06-01 | Advanced Imaging Systems, Inc. | Emg electrode apparatus and positioning system |
| US6364849B1 (en) | 1999-05-03 | 2002-04-02 | Access Wellness And Physical Therapy | Soft tissue diagnostic apparatus and method |
| US20020133094A1 (en) | 1999-05-03 | 2002-09-19 | Access Wellness And Physical Therapy | Soft tissue diagnostic apparatus and method |
| KR20020077346A (ko) | 1999-11-24 | 2002-10-11 | 너바시브 인코퍼레이티드 | 근전도검사 시스템 |
| US7027633B2 (en) | 2000-11-30 | 2006-04-11 | Foran David J | Collaborative diagnostic systems |
| US6678549B2 (en) * | 2001-03-26 | 2004-01-13 | Cusimano Maryrose | Combined physiological monitoring system |
| US6823212B2 (en) * | 2001-06-13 | 2004-11-23 | The Procter & Gamble Company | Method and apparatus for measuring properties of a target surface |
| JP2005503857A (ja) * | 2001-09-25 | 2005-02-10 | ヌバシブ, インコーポレイテッド | 外科処置手順および外科的診断を実施するためのシステムおよび方法 |
| US8059815B2 (en) | 2001-12-13 | 2011-11-15 | Digimarc Corporation | Transforming data files into logical storage units for auxiliary data through reversible watermarks |
| JP2004187736A (ja) | 2002-12-06 | 2004-07-08 | Eucalyptus:Kk | 体表面心電計 |
| WO2005006956A2 (en) | 2003-07-09 | 2005-01-27 | Medical Technologies Unlimited, Inc. | Comprehensive neuromuscular profiler |
| JP4432420B2 (ja) * | 2003-09-17 | 2010-03-17 | 横浜ゴム株式会社 | 作業快適度評価装置および作業快適度評価方法 |
| JP2007518430A (ja) * | 2003-10-24 | 2007-07-12 | ヒューマニタス・ミラソーレ・エス.ピー.エー. | 運動機能検査システム |
| US8170637B2 (en) * | 2008-05-06 | 2012-05-01 | Neurosky, Inc. | Dry electrode device and method of assembly |
| US20060052720A1 (en) * | 2004-09-03 | 2006-03-09 | Ross David B | Evaluation of pain in humans |
| US8032210B2 (en) | 2005-10-06 | 2011-10-04 | Spinematrix, Inc. | EMG diagnostic system and method |
| JP2007209608A (ja) | 2006-02-10 | 2007-08-23 | Omron Healthcare Co Ltd | 携帯型心電計 |
| US20090005709A1 (en) * | 2007-06-27 | 2009-01-01 | Gagne Raoul J | Range of motion measurement device |
| US9984203B2 (en) | 2009-10-14 | 2018-05-29 | Trice Imaging, Inc. | Systems and methods for converting and delivering medical images to mobile devices and remote communications systems |
| US20120095779A1 (en) | 2010-10-13 | 2012-04-19 | Wengrovitz Michael S | Method and apparatus for providing location-based data and services in healthcare environments |
| US9147178B2 (en) | 2012-01-16 | 2015-09-29 | International Business Machines Corporation | De-identification in visual media data |
-
2009
- 2009-06-01 DK DK09759169.7T patent/DK2296545T3/en active
- 2009-06-01 JP JP2011512562A patent/JP5453404B2/ja not_active Expired - Fee Related
- 2009-06-01 AU AU2009256441A patent/AU2009256441B2/en active Active
- 2009-06-01 CN CN200980120464.3A patent/CN102046079B/zh not_active Expired - Fee Related
- 2009-06-01 KR KR1020127027138A patent/KR101508822B1/ko active IP Right Grant
- 2009-06-01 EP EP13181241.4A patent/EP2666410B1/en active Active
- 2009-06-01 KR KR1020107029868A patent/KR101324868B1/ko active IP Right Grant
- 2009-06-01 WO PCT/US2009/045828 patent/WO2009149008A2/en active Application Filing
- 2009-06-01 EP EP09759169.7A patent/EP2296545B1/en active Active
- 2009-06-01 US US12/455,385 patent/US9808172B2/en active Active
-
2011
- 2011-11-01 HK HK11111734.5A patent/HK1157171A1/xx not_active IP Right Cessation
-
2013
- 2013-11-07 JP JP2013231408A patent/JP2014061413A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| KR20120121929A (ko) | 2012-11-06 |
| AU2009256441A1 (en) | 2009-12-10 |
| WO2009149008A3 (en) | 2010-03-04 |
| CN102046079B (zh) | 2014-08-06 |
| KR101324868B1 (ko) | 2013-11-01 |
| EP2296545A2 (en) | 2011-03-23 |
| EP2296545A4 (en) | 2012-11-14 |
| CN102046079A (zh) | 2011-05-04 |
| DK2296545T3 (en) | 2015-02-02 |
| KR101508822B1 (ko) | 2015-04-07 |
| KR20110025935A (ko) | 2011-03-14 |
| EP2666410A1 (en) | 2013-11-27 |
| US20090299210A1 (en) | 2009-12-03 |
| EP2296545B1 (en) | 2014-12-03 |
| JP2011521768A (ja) | 2011-07-28 |
| AU2009256441B2 (en) | 2013-06-13 |
| HK1157171A1 (en) | 2012-06-29 |
| JP2014061413A (ja) | 2014-04-10 |
| WO2009149008A2 (en) | 2009-12-10 |
| EP2666410B1 (en) | 2016-08-10 |
| US9808172B2 (en) | 2017-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5453404B2 (ja) | 表面筋電図検査及び関節可動域検査を行うためのシステム | |
| JP4529884B2 (ja) | 体脂肪測定装置および上肢ユニット | |
| JP5038620B2 (ja) | 運動機能検査装置 | |
| KR101033198B1 (ko) | 학생 건강 체력 평가 시스템용 일체형 측정 장치 | |
| CN112089442B (zh) | 利用超声成像提供视觉反馈的肌肉训练方法及系统 | |
| JP2008539897A (ja) | 前立腺の機械的イメージングをリアルタイムで行うための方法、及び二重アレイ式トランスデューサ・プローブ | |
| CA2288720A1 (en) | Muscle function assessment apparatus and method | |
| Hong et al. | Measurement of covered curvature based on a tape of integrated accelerometers | |
| JP2019063091A (ja) | 維持システム、維持方法、及び維持プログラム | |
| US11557073B2 (en) | System for generating medical diagnostic images | |
| KR102234845B1 (ko) | 개인 맞춤형 의료 진단 이미지 내의 연락처 메시지 | |
| JP6062889B2 (ja) | 筋収縮運動支援システム | |
| EP3658023B1 (en) | Method for assessing balance | |
| AU2013203331A1 (en) | Systems and methods for performing surface electromyography and range-of-motion tests | |
| JP2006034809A (ja) | 伸張反射測定装置 | |
| CN213309660U (zh) | 一种体检仪 | |
| RU76561U1 (ru) | Устройство для оценки и диагностики психофизиологического состояния человека | |
| RU40157U1 (ru) | Устройство для измерения подвижности костей черепа человека | |
| Kam | Plastic optical fibre based sensors for monitoring physiological parameters in clinical environments | |
| WO2022042778A2 (es) | Sistema de elastografía ultrasónica como herramienta de apoyo diagnóstico en personas con espasticidad muscular, y su método de operación | |
| AU718995B2 (en) | Muscle function assessment apparatus and method | |
| CN113995399A (zh) | 一种关节状态测试装置 | |
| CN115998289A (zh) | 一种步态测量装置及其测量方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120405 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140106 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5453404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |