JP5435943B2 - 動的固定器具 - Google Patents
動的固定器具 Download PDFInfo
- Publication number
- JP5435943B2 JP5435943B2 JP2008518436A JP2008518436A JP5435943B2 JP 5435943 B2 JP5435943 B2 JP 5435943B2 JP 2008518436 A JP2008518436 A JP 2008518436A JP 2008518436 A JP2008518436 A JP 2008518436A JP 5435943 B2 JP5435943 B2 JP 5435943B2
- Authority
- JP
- Japan
- Prior art keywords
- segment
- fixation device
- dynamic fixation
- rod
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000463 material Substances 0.000 claims description 56
- 229920001652 poly(etherketoneketone) Polymers 0.000 claims description 15
- 229920003229 poly(methyl methacrylate) Polymers 0.000 claims description 14
- 239000004926 polymethyl methacrylate Substances 0.000 claims description 14
- 239000004696 Poly ether ether ketone Substances 0.000 claims description 10
- 229920002530 polyetherether ketone Polymers 0.000 claims description 10
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 claims description 8
- 239000010936 titanium Substances 0.000 claims description 8
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 229910052719 titanium Inorganic materials 0.000 claims description 3
- 239000004699 Ultra-high molecular weight polyethylene Substances 0.000 claims 1
- 229920000785 ultra high molecular weight polyethylene Polymers 0.000 claims 1
- 238000005452 bending Methods 0.000 description 38
- 230000007935 neutral effect Effects 0.000 description 26
- 238000013519 translation Methods 0.000 description 26
- 239000007943 implant Substances 0.000 description 21
- 210000000988 bone and bone Anatomy 0.000 description 12
- 230000035882 stress Effects 0.000 description 12
- 230000006835 compression Effects 0.000 description 11
- 238000007906 compression Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 11
- RTZKZFJDLAIYFH-UHFFFAOYSA-N Diethyl ether Chemical compound CCOCC RTZKZFJDLAIYFH-UHFFFAOYSA-N 0.000 description 10
- 238000004873 anchoring Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 8
- 230000035876 healing Effects 0.000 description 8
- 229910052751 metal Inorganic materials 0.000 description 8
- 239000002184 metal Substances 0.000 description 8
- 229920003023 plastic Polymers 0.000 description 8
- 239000004033 plastic Substances 0.000 description 8
- 210000004705 lumbosacral region Anatomy 0.000 description 7
- 150000002739 metals Chemical class 0.000 description 7
- -1 polyethylene Polymers 0.000 description 7
- 239000010935 stainless steel Substances 0.000 description 7
- 229910001220 stainless steel Inorganic materials 0.000 description 7
- 229920010741 Ultra High Molecular Weight Polyethylene (UHMWPE) Polymers 0.000 description 6
- 210000003484 anatomy Anatomy 0.000 description 6
- 210000001519 tissue Anatomy 0.000 description 6
- 229910001200 Ferrotitanium Inorganic materials 0.000 description 5
- 206010023204 Joint dislocation Diseases 0.000 description 5
- 239000004698 Polyethylene Substances 0.000 description 5
- 239000002131 composite material Substances 0.000 description 5
- 230000006378 damage Effects 0.000 description 5
- 150000002576 ketones Chemical class 0.000 description 5
- 229920000573 polyethylene Polymers 0.000 description 5
- 230000003044 adaptive effect Effects 0.000 description 4
- 230000007850 degeneration Effects 0.000 description 4
- 208000014674 injury Diseases 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 210000002517 zygapophyseal joint Anatomy 0.000 description 4
- 239000004642 Polyimide Substances 0.000 description 3
- 229910001069 Ti alloy Inorganic materials 0.000 description 3
- 210000000845 cartilage Anatomy 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 210000005036 nerve Anatomy 0.000 description 3
- 229920001721 polyimide Polymers 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 230000006641 stabilisation Effects 0.000 description 3
- 238000011105 stabilization Methods 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 239000004812 Fluorinated ethylene propylene Substances 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 238000002513 implantation Methods 0.000 description 2
- 210000003041 ligament Anatomy 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical class C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 2
- 229920009441 perflouroethylene propylene Polymers 0.000 description 2
- 229920001707 polybutylene terephthalate Polymers 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 239000004814 polyurethane Substances 0.000 description 2
- 229920003225 polyurethane elastomer Polymers 0.000 description 2
- 241000894007 species Species 0.000 description 2
- 230000008733 trauma Effects 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 206010003246 arthritis Diseases 0.000 description 1
- 238000011882 arthroplasty Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000000560 biocompatible material Substances 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000005786 degenerative changes Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 239000013536 elastomeric material Substances 0.000 description 1
- 125000003700 epoxy group Chemical group 0.000 description 1
- HQQADJVZYDDRJT-UHFFFAOYSA-N ethene;prop-1-ene Chemical group C=C.CC=C HQQADJVZYDDRJT-UHFFFAOYSA-N 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000003301 hydrolyzing effect Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000007971 neurological deficit Effects 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 230000008560 physiological behavior Effects 0.000 description 1
- 229920002492 poly(sulfone) Polymers 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 239000012858 resilient material Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000011232 storage material Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000010966 surgical stainless steel Substances 0.000 description 1
- 229910000811 surgical stainless steel Inorganic materials 0.000 description 1
Images









































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7011—Longitudinal element being non-straight, e.g. curved, angled or branched
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7019—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other
- A61B17/7023—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other with a pivot joint
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7019—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other
- A61B17/7026—Longitudinal elements having flexible parts, or parts connected together, such that after implantation the elements can move relative to each other with a part that is flexible due to its form
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/44—Joints for the spine, e.g. vertebrae, spinal discs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7004—Longitudinal elements, e.g. rods with a cross-section which varies along its length
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7004—Longitudinal elements, e.g. rods with a cross-section which varies along its length
- A61B17/7007—Parts of the longitudinal elements, e.g. their ends, being specially adapted to fit around the screw or hook heads
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00004—(bio)absorbable, (bio)resorbable or resorptive
Landscapes
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Neurology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Cardiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Transplantation (AREA)
- Vascular Medicine (AREA)
- Surgical Instruments (AREA)
- Prostheses (AREA)
Description
また、患者によっては、脊柱が人体の体重を受けて自然に落ち着くことができるようにする脊椎インプラントシステムを用いることが望ましい。人の骨は、或る程度の圧力を受けた状態で一層容易に治癒する。剛性脊椎インプラントシステムでは、患者の脊柱は、インプラントの構造により不自然に互いに離されて保持される場合がある。互いに関する椎骨のこの伸展の結果として、骨の治癒が遅れ又は不完全になる可能性がある。
米国特許第6,440,169号明細書(以下、「第169号特許明細書」という。)は、2つの椎骨の棘突起に取り付けられる器具を開示しており、この器具は、この器具が縮み、次に、応力が無くなった後は自発的に回復することができるようにする板ばねを有する。しかしながら、第169号特許明細書は、脊椎が屈曲を行ったときに椎骨が関節運動することができるようにする前方に突き出されたピボット箇所を含む構造体に取り組んではいない。
現時点において、椎弓根固定は、脊椎への受け入れられた固定方法である。腰椎固定の状況では、比較的剛性の構造体が、脊椎を安定化し、骨構造体の治癒を可能にするのに妥当である。腰椎構造体に保護をもたらす状況では、可撓性システムが、腰椎要素の運動を制限するがこれを止めない上で妥当である。かかるシステムの可撓性要素は、幾つかの目的を達成する上で必要である。主要な目的は、脊椎の生理学的運動を可能にし、しかも、過剰の又は非生理学的な運動に対する保護を行うことである。二次的な観点は、椎弓根固定をその骨とのインターフェイスのところの固定具合を緩める場合のある過度の応力から保護することにある。
後側器具に適用された場合、セグメントの亜脱臼を抑制し、通常の回転ゾーン又は回転軸線内の又はその近くの回転を維持する一群の幾何学的形状が存在する。使用の適応は、応力及び動きを、体の通常の治癒反応が運動セグメントにおいて適当な適応能力を維持して不安定性又は神経の悪化の発生を回避すると共に疼痛又は関節炎を最小限に抑える範囲内に抑えることにある。かかる重要な特徴は、変性中の椎間円板と関連していて、変性の進行の要因となる異常な亜脱臼又は並進を生じないで、生理学的運動の維持を可能にする。かくして、過剰な亜脱臼又は並進を制限する構造体を提供することが、本発明の別の特徴である。
したがって、或る程度の制限された運動を可能にし、それによりインプラントの種々のコンポーネント及び患部としての椎骨に加わる応力を減少させる器具を提供することが本発明の特徴である。運動が脊椎の曲げ運動をモデル化するよう設計された器具を提供することが、本発明の別の特徴である。本発明の幾つかの別々の実施形態は、かかる課題を解決する。
ヒトの脊椎の解剖学的構造に幾何学的に順応する一方で前方に突き出された回転ゾーンを提供する構造部材を提供する構造体を提供することが、本発明の別の特徴である。
本発明の更に別の実施形態では、動的固定器具は、内部中空領域、好ましくは傾斜した内部側壁を備える幾何学的形状部を有する。この特徴により、器具は、幾何学的形状部の平面に対して横方向に曲がることができる。内部側壁の角度は、器具の仮想回転軸線として働くピボット箇所の所望の突出量に応じて様々であって良い。
本明細書において説明した動的固定器具は、装置内の回転軸線又は回転領域を自然に制御するよう働くが、構造体の一部として椎間円板を考察することも有利である。椎間円板は、並進荷重とは対照的に軸方向荷重に関して適応能力があると仮定した場合、この適応能力を利用して椎間円板の高さを制御することができ、それに付随して、インプラント及び椎骨構造体の前側部分を制御することができる。かくして、更に別の実施形態では、これにより、回転可能な前後方向セグメントを有する後方構造体が、セグメント状構造体の指定された運動範囲内で並進を効果的に制御することができる。許容される僅かな並進があっても、これは、自然な回転領域の範囲内に十分に収まる。この実施形態は、好ましくは、ピンを備えたヒンジ式部分を有する。前後方向セグメント又はヒンジ式アームが、エラストマーセグメントであると見なされる場合、その機能は、このセグメントの座屈を生じさせるのに必要な並進力よりも小さな並進力で決まる。このセグメントの断面形状を調節することにより、脊椎の前方曲げを可能にし、圧縮時の適応能力を植え込み状況において遭遇する力の範囲内に維持することができる。
使用にあたり、問題のある椎間円板を外科医が最初に突き止める。手術の際、脊椎のインプラント配設場所の上の皮膚及び筋肉に切開部を作る。第1の椎弓根ねじを第1の椎骨中に挿入し、第2の椎弓根ねじを第2の椎骨中に挿入する。次に、外科医は、調節可能なコネクタか動的固定器具の一部分として一体形成されている端コネクタかのいずれかを用いて動的固定器具を椎弓根ねじに取り付ける。
本発明の追加の利点は、特に添付の図面を参照して行われる以下の説明から容易に明らかになろう。
本発明を特定の実施例及び具体化方法が示された添付の図面を参照して以下に詳細に説明するが、最初に、当業者であれば本明細書に記載した本発明を改造することができる一方で、本発明の機能及び結果を達成することができることは理解されるべきである。したがって、以下の説明は、本発明の広い範囲に属する特定の構造、観点及び特徴の例示であると理解されるべきであり、かかる広い範囲を限定するものと理解されてはならない。
上述したように、各椎骨間軟骨結合又は椎間円板Dのところでは、屈曲は、前方矢状回転と僅かな大きさの前方並進の組合せを含む。本発明の種々の実施形態は、制御された回転を可能にする一方で、並進を許容可能な通常の生理学的範囲内に制限することができる。
依然として図8aに示すこの実施形態の例を参照すると、動的固定器具62も又、コネクタ18a,18bの中心によって定められる長手方向軸線L−Lを有している。ロッドアーム65は、全体として、長手方向軸線L−Lの前方に位置し、中間ロッドセグメント70は、全体として、長手方向軸線L−Lの後方に位置し、前後方向セグメント64は、長手方向軸線L−Lの前側と後方側の両方に位置する部分を有している。
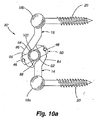
次に図9a〜図9cを参照すると、更に別の実施形態としての動的固定器具が示されている。動的固定器具78は、3つの実質的に真っ直ぐなアームセグメントを有している。これらは、下方アーム80aと、第1の中間アーム80bと上方アーム80cとから成っている。下側アーム80a及び上側アーム80dは、それぞれ、コネクタ18a,18bに連結され、これらコネクタが、この場合、椎弓根ねじ20に連結されている。中間アーム80bの反対側の端部は、上方アーム80cにヒンジ式に連結されている(例えばピン46によって)。屈曲中、上側アーム80cは、上方且つ前方に動き、それにより中間アーム80bを下方に回転させる。かくして、上側アーム80cへの中間アーム80bのヒンジ式連結により、上側アーム80cは、前方回転を伴って上方に動くことができ、これに対し、中間アーム80bと下側アーム80aの連結により、過剰の並進又は過剰の回転が阻止されるようになっている。器具62の前後方向セグメント64の機能と同様に、この実施形態における中間アーム80bは、所与の範囲の屈曲運動を可能にするが、椎骨が過剰の並進を行うのを阻止する前後方向セグメントとして働く。かくして、動的固定器具78は、上側椎骨が上方に且つ僅かに前方に動くのを許容するが、動的固定器具78が取り付けられている椎骨の過剰の並進に抵抗する。
動的固定器具82は、脊椎の部分的に適用される運動制御の提供に利用される。というのは、インプラントを受け入れるよう設計された各運動セグメントは、その寸法及びばね定数を介してカスタマイズされた動的固定器具インプラントを有することができ、それにより患者に所望される通常の生理学的範囲内の制御された動きを与えることができるからである。
動的固定器具は、複数個の椎骨を屈曲可能に固定するために使用されるのが良い。変形例として、動的固定器具を脊椎の曲げが望ましい特定の箇所に配置することができる一方で、剛性ロッドを外科医の望む他の場所で使用することができる。使用時に剛性ロッド部分を湾曲させるのが良く、それにより幾何学的形状部のヒンジ式構造体の植え込み場所及びかくして事実上のピボット箇所に影響が及ぼされる。
人体と適合性のあるものとして選択された材料は、有機及び無機化学物質に対して耐性があり、所望の強度及び剛性を備え、広い温度範囲にわたり衝撃に対して耐性があり、しかも加水分解及び腐食に対して耐性があるべきである。
本発明の実施形態によれば、骨の中に植え込まれる動的固定器具の各種要素は、骨グラフト材料で作られるのが良い。かかる材料は、同じ種の有機体から成長したものであることを意味する同種移植性であっても良く、或いは別の種の有機体から成長したものであることを意味する異種移植性であっても良い。
さらに、本発明は、医療分野以外の分野で利用できることは言うまでもない。本発明の動的固定器具は、医用インプラントには限定されない。動的固定器具は、地震用防振用途に使用できる。変形例として、本発明は、例えば結合機構体において2つの任意の物品を互いに固定するために利用でき、又、可動連結部を備えた任意形式の機械的装置に利用できる。他の用途としては、任意の関節式器具の連結、例えばトラクタへの工具の連結が挙げられるが、これに限られるわけではない。また、本発明は、これまでの静的形式の連結用途、例えばベース構造体へのアンテナの取り付けに使用できる。種々の技術分野における当業者であれば、本明細書において提供した指針(外科用途に関する)を考慮すると共に本明細書に添付された図を考慮すると、本発明をどのように構成して利用すべきかは、理解されよう。
Claims (2)
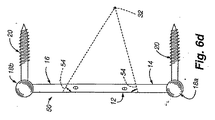
- 2つのコネクタ(18a、18b)及び2つの椎弓根ねじ(20)を用いて患者の脊椎の少なくとも2つの椎骨を屈曲可能に結合する動的固定器具(118)であって、
前記動的固定器具は、ロッドを備え、
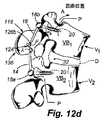
前記ロッドは、第1のロッド端部(14)及び第2のロッド端部(16)と、第1の可撓性ロッド部材(120)によって前記第1のロッド端部(14)に連結された前後方向ロッドセグメント(124)を含み、前記前後方向ロッドセグメント(124)は、第2の可撓性ロッド部材(122)により前記第2のロッド端部(16)に連結され、前記第1の可撓性ロッド部材(120)は、第1のセグメントおよび第2のセグメント(130)によって境界付けられたセグメント(128)を備えた第1の継手(126a)を含み、前記第1のセグメントおよび前記第2のセグメント(130)の各々は、後方に差し向けられた凹み部分(132a)と前方に差し向けられた凹み部分(132b)が交互に位置する一連の凹み部分(132)を含んでおり、前記第2の可撓性ロッド部材(122)は、第1のセグメントおよび第2のセグメント(130)で境界付けられたセグメント(128)を備えた第2の継手(126b)を備え、前記第1のセグメントおよび前記第2のセグメント(130)の各々は、後方に差し向けられた凹み部分(132a)と前方に差し向けられた凹み部分(132b)が交互に位置する一連の凹み部分(132)を含んでおり、前記第1の継手(126a)及び第2の継手(126b)はコネクタ(18a、18b)の中心により定められた長手方向軸線(L−L)の両側に位置し、
前記前後方向ロッドセグメント(124)は、前記少なくとも2つの椎骨のうちの第1の椎骨を、前記少なくとも2つの椎骨のうちの第2の椎骨に対して回転させることができるようになっている、
ことを特徴とする動的固定器具(118)。 - 前記ロッドは、チタン、ポリエーテルエーテルケトン、ポリエーテルケトンケトン、超高分子量ポリエチレン、及び、ポリメチルメタクリレート(PMMA)から成る群から選択された材料で構成されている、請求項1に記載の動的固定器具(118)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US69312605P | 2005-06-22 | 2005-06-22 | |
| US60/693,126 | 2005-06-22 | ||
| PCT/US2006/024491 WO2007002409A2 (en) | 2005-06-22 | 2006-06-22 | Dynamic fixation device and method of use |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008546487A JP2008546487A (ja) | 2008-12-25 |
| JP2008546487A5 JP2008546487A5 (ja) | 2009-08-06 |
| JP5435943B2 true JP5435943B2 (ja) | 2014-03-05 |
Family
ID=37595883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008518436A Expired - Fee Related JP5435943B2 (ja) | 2005-06-22 | 2006-06-22 | 動的固定器具 |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP1898813B9 (ja) |
| JP (1) | JP5435943B2 (ja) |
| KR (1) | KR20080041628A (ja) |
| CN (1) | CN101247764B (ja) |
| AU (1) | AU2006262057A1 (ja) |
| CA (1) | CA2612943A1 (ja) |
| WO (1) | WO2007002409A2 (ja) |
Families Citing this family (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7833250B2 (en) | 2004-11-10 | 2010-11-16 | Jackson Roger P | Polyaxial bone screw with helically wound capture connection |
| US10258382B2 (en) | 2007-01-18 | 2019-04-16 | Roger P. Jackson | Rod-cord dynamic connection assemblies with slidable bone anchor attachment members along the cord |
| US7862587B2 (en) | 2004-02-27 | 2011-01-04 | Jackson Roger P | Dynamic stabilization assemblies, tool set and method |
| US10729469B2 (en) | 2006-01-09 | 2020-08-04 | Roger P. Jackson | Flexible spinal stabilization assembly with spacer having off-axis core member |
| US8876868B2 (en) | 2002-09-06 | 2014-11-04 | Roger P. Jackson | Helical guide and advancement flange with radially loaded lip |
| US7621918B2 (en) | 2004-11-23 | 2009-11-24 | Jackson Roger P | Spinal fixation tool set and method |
| US7377923B2 (en) | 2003-05-22 | 2008-05-27 | Alphatec Spine, Inc. | Variable angle spinal screw assembly |
| US7776067B2 (en) | 2005-05-27 | 2010-08-17 | Jackson Roger P | Polyaxial bone screw with shank articulation pressure insert and method |
| US7967850B2 (en) | 2003-06-18 | 2011-06-28 | Jackson Roger P | Polyaxial bone anchor with helical capture connection, insert and dual locking assembly |
| US8926670B2 (en) | 2003-06-18 | 2015-01-06 | Roger P. Jackson | Polyaxial bone screw assembly |
| US7766915B2 (en) | 2004-02-27 | 2010-08-03 | Jackson Roger P | Dynamic fixation assemblies with inner core and outer coil-like member |
| US8366753B2 (en) | 2003-06-18 | 2013-02-05 | Jackson Roger P | Polyaxial bone screw assembly with fixed retaining structure |
| US11419642B2 (en) | 2003-12-16 | 2022-08-23 | Medos International Sarl | Percutaneous access devices and bone anchor assemblies |
| US7527638B2 (en) | 2003-12-16 | 2009-05-05 | Depuy Spine, Inc. | Methods and devices for minimally invasive spinal fixation element placement |
| US7179261B2 (en) | 2003-12-16 | 2007-02-20 | Depuy Spine, Inc. | Percutaneous access devices and bone anchor assemblies |
| US11241261B2 (en) | 2005-09-30 | 2022-02-08 | Roger P Jackson | Apparatus and method for soft spinal stabilization using a tensionable cord and releasable end structure |
| CA2555868C (en) | 2004-02-27 | 2011-09-06 | Roger P. Jackson | Orthopedic implant rod reduction tool set and method |
| US8152810B2 (en) | 2004-11-23 | 2012-04-10 | Jackson Roger P | Spinal fixation tool set and method |
| US7160300B2 (en) | 2004-02-27 | 2007-01-09 | Jackson Roger P | Orthopedic implant rod reduction tool set and method |
| US9050148B2 (en) | 2004-02-27 | 2015-06-09 | Roger P. Jackson | Spinal fixation tool attachment structure |
| US7651502B2 (en) | 2004-09-24 | 2010-01-26 | Jackson Roger P | Spinal fixation tool set and method for rod reduction and fastener insertion |
| US8926672B2 (en) | 2004-11-10 | 2015-01-06 | Roger P. Jackson | Splay control closure for open bone anchor |
| US9918745B2 (en) | 2009-06-15 | 2018-03-20 | Roger P. Jackson | Polyaxial bone anchor with pop-on shank and winged insert with friction fit compressive collet |
| US9216041B2 (en) | 2009-06-15 | 2015-12-22 | Roger P. Jackson | Spinal connecting members with tensioned cords and rigid sleeves for engaging compression inserts |
| US8444681B2 (en) | 2009-06-15 | 2013-05-21 | Roger P. Jackson | Polyaxial bone anchor with pop-on shank, friction fit retainer and winged insert |
| US9168069B2 (en) | 2009-06-15 | 2015-10-27 | Roger P. Jackson | Polyaxial bone anchor with pop-on shank and winged insert with lower skirt for engaging a friction fit retainer |
| US7901437B2 (en) | 2007-01-26 | 2011-03-08 | Jackson Roger P | Dynamic stabilization member with molded connection |
| CA2670988C (en) | 2006-12-08 | 2014-03-25 | Roger P. Jackson | Tool system for dynamic spinal implants |
| US8475498B2 (en) | 2007-01-18 | 2013-07-02 | Roger P. Jackson | Dynamic stabilization connecting member with cord connection |
| US8007519B2 (en) * | 2007-03-13 | 2011-08-30 | Zimmer Spine, Inc. | Dynamic spinal stabilization system and method of using the same |
| GB0707285D0 (en) * | 2007-04-17 | 2007-05-23 | Burke John | Implantable apparatus for modulation of skeletal growth |
| US10383660B2 (en) | 2007-05-01 | 2019-08-20 | Roger P. Jackson | Soft stabilization assemblies with pretensioned cords |
| US8979904B2 (en) | 2007-05-01 | 2015-03-17 | Roger P Jackson | Connecting member with tensioned cord, low profile rigid sleeve and spacer with torsion control |
| FR2919170B1 (fr) * | 2007-07-24 | 2010-09-03 | Henry Graf | Element extra-discal de stabilisation intervertebrale,jeu de tels elements et ensemble de stabilisation correspondant |
| FR2930886A1 (fr) * | 2007-07-24 | 2009-11-13 | Henry Graf | Ensemble extra-discal de stabilisation protherique intervetebrale |
| US8911477B2 (en) | 2007-10-23 | 2014-12-16 | Roger P. Jackson | Dynamic stabilization member with end plate support and cable core extension |
| EP2442739A1 (en) | 2008-08-01 | 2012-04-25 | Jackson, Roger P. | Longitudinal connecting member with sleeved tensioned cords |
| US20120150309A1 (en) * | 2009-04-29 | 2012-06-14 | Roelof Marissen | Hinge structure |
| WO2010144458A1 (en) * | 2009-06-08 | 2010-12-16 | Reduction Technologies Inc. | Systems, methods and devices for correcting spinal deformities |
| US9668771B2 (en) | 2009-06-15 | 2017-06-06 | Roger P Jackson | Soft stabilization assemblies with off-set connector |
| US11229457B2 (en) | 2009-06-15 | 2022-01-25 | Roger P. Jackson | Pivotal bone anchor assembly with insert tool deployment |
| US8998959B2 (en) | 2009-06-15 | 2015-04-07 | Roger P Jackson | Polyaxial bone anchors with pop-on shank, fully constrained friction fit retainer and lock and release insert |
| WO2011127443A1 (en) * | 2010-04-08 | 2011-10-13 | Globus Medical, Inc. | Jointed rod |
| CA2797080A1 (en) * | 2010-04-30 | 2011-11-03 | The Johns Hopkins University | Intersegmental motion preservation system for use in the spine and methods for use thereof |
| EP2613719A1 (en) | 2010-09-08 | 2013-07-17 | Roger P. Jackson | Dynamic stabilization members with elastic and inelastic sections |
| CN102362816B (zh) * | 2011-11-17 | 2013-04-03 | 瞿玉兴 | 腰椎动态固定系统 |
| CN103356275B (zh) * | 2012-03-29 | 2016-06-01 | 董健文 | 一种微动腰椎椎弓根钉棒弹性固定系统 |
| US8911478B2 (en) | 2012-11-21 | 2014-12-16 | Roger P. Jackson | Splay control closure for open bone anchor |
| US10058354B2 (en) | 2013-01-28 | 2018-08-28 | Roger P. Jackson | Pivotal bone anchor assembly with frictional shank head seating surfaces |
| US8852239B2 (en) | 2013-02-15 | 2014-10-07 | Roger P Jackson | Sagittal angle screw with integral shank and receiver |
| US9566092B2 (en) | 2013-10-29 | 2017-02-14 | Roger P. Jackson | Cervical bone anchor with collet retainer and outer locking sleeve |
| US9717533B2 (en) | 2013-12-12 | 2017-08-01 | Roger P. Jackson | Bone anchor closure pivot-splay control flange form guide and advancement structure |
| US9451993B2 (en) | 2014-01-09 | 2016-09-27 | Roger P. Jackson | Bi-radial pop-on cervical bone anchor |
| US9597119B2 (en) | 2014-06-04 | 2017-03-21 | Roger P. Jackson | Polyaxial bone anchor with polymer sleeve |
| US10064658B2 (en) | 2014-06-04 | 2018-09-04 | Roger P. Jackson | Polyaxial bone anchor with insert guides |
| KR101616124B1 (ko) * | 2014-08-11 | 2016-04-28 | 김현성 | 다이나믹 로드 |
| CN104382682A (zh) * | 2014-12-03 | 2015-03-04 | 耿晓鹏 | 一种复合式腰椎动态固定装置 |
| CN105816233A (zh) * | 2015-01-05 | 2016-08-03 | 财团法人金属工业研究发展中心 | 骨骼固定装置 |
| CN110538013B (zh) * | 2019-09-11 | 2024-08-30 | 北京爱康宜诚医疗器材有限公司 | 脊柱融合假体 |
| CN111643171B (zh) * | 2020-05-22 | 2021-06-04 | 北京市春立正达医疗器械股份有限公司 | 一种多级角度动态椎体植入系统 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5785712A (en) * | 1996-04-16 | 1998-07-28 | Terray Corporation | Reconstruction bone plate |
| FR2799949B1 (fr) * | 1999-10-22 | 2002-06-28 | Abder Benazza | Dispositif d'ostheosynthese rachidienne |
| US6293949B1 (en) * | 2000-03-01 | 2001-09-25 | Sdgi Holdings, Inc. | Superelastic spinal stabilization system and method |
| US6966910B2 (en) * | 2002-04-05 | 2005-11-22 | Stephen Ritland | Dynamic fixation device and method of use |
| CA2484923C (en) * | 2002-05-08 | 2011-02-22 | Stephen Ritland | Dynamic fixation device and method of use |
| FR2845587B1 (fr) * | 2002-10-14 | 2005-01-21 | Scient X | Dispositif dynamique de liaison intervertebrale a debattement controle multidirectionnel |
| DE102004055454A1 (de) * | 2004-11-17 | 2006-05-24 | Biedermann Motech Gmbh | Elastisches Element zur Verwendung in einer Stabilisierungseinrichtung für Knochen oder Wirbel |
-
2006
- 2006-06-22 WO PCT/US2006/024491 patent/WO2007002409A2/en active Application Filing
- 2006-06-22 AU AU2006262057A patent/AU2006262057A1/en not_active Abandoned
- 2006-06-22 KR KR1020087001586A patent/KR20080041628A/ko not_active Application Discontinuation
- 2006-06-22 CN CN2006800301055A patent/CN101247764B/zh not_active Expired - Fee Related
- 2006-06-22 JP JP2008518436A patent/JP5435943B2/ja not_active Expired - Fee Related
- 2006-06-22 EP EP06785447.1A patent/EP1898813B9/en not_active Not-in-force
- 2006-06-22 CA CA002612943A patent/CA2612943A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP1898813A2 (en) | 2008-03-19 |
| WO2007002409A2 (en) | 2007-01-04 |
| EP1898813B9 (en) | 2013-04-17 |
| WO2007002409A3 (en) | 2007-11-15 |
| CN101247764A (zh) | 2008-08-20 |
| EP1898813A4 (en) | 2009-04-22 |
| JP2008546487A (ja) | 2008-12-25 |
| EP1898813B1 (en) | 2012-10-10 |
| CA2612943A1 (en) | 2007-01-04 |
| KR20080041628A (ko) | 2008-05-13 |
| CN101247764B (zh) | 2011-12-28 |
| AU2006262057A1 (en) | 2007-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5435943B2 (ja) | 動的固定器具 | |
| US9918744B2 (en) | Dynamic fixation device and method of use | |
| AU2004228019B2 (en) | Dynamic fixation device and method of use | |
| US9463051B2 (en) | Facet joint prosthesis | |
| US7985244B2 (en) | Posterior dynamic stabilizer devices | |
| AU2012244228A1 (en) | Implant device | |
| AU2008201824B2 (en) | Dynamic fixation device and method of use |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090617 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090617 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120302 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121217 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130314 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130322 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131210 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |