JP5274829B2 - 非侵襲生体計測装置 - Google Patents
非侵襲生体計測装置 Download PDFInfo
- Publication number
- JP5274829B2 JP5274829B2 JP2007336392A JP2007336392A JP5274829B2 JP 5274829 B2 JP5274829 B2 JP 5274829B2 JP 2007336392 A JP2007336392 A JP 2007336392A JP 2007336392 A JP2007336392 A JP 2007336392A JP 5274829 B2 JP5274829 B2 JP 5274829B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- living body
- imaging
- imaging unit
- fixing member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 title claims description 71
- 238000003384 imaging method Methods 0.000 claims abstract description 214
- 238000000926 separation method Methods 0.000 claims abstract description 17
- 238000004458 analytical method Methods 0.000 claims description 4
- 210000004204 blood vessel Anatomy 0.000 description 65
- 238000000034 method Methods 0.000 description 45
- 238000010586 diagram Methods 0.000 description 18
- 210000000707 wrist Anatomy 0.000 description 15
- 102000001554 Hemoglobins Human genes 0.000 description 12
- 108010054147 Hemoglobins Proteins 0.000 description 12
- 238000012545 processing Methods 0.000 description 12
- 238000004590 computer program Methods 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 7
- 238000004891 communication Methods 0.000 description 7
- 210000004369 blood Anatomy 0.000 description 6
- 239000008280 blood Substances 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 239000004973 liquid crystal related substance Substances 0.000 description 6
- 239000012503 blood component Substances 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 239000000306 component Substances 0.000 description 4
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 2
- 210000000601 blood cell Anatomy 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 238000000149 argon plasma sintering Methods 0.000 description 1
- OJIJEKBXJYRIBZ-UHFFFAOYSA-N cadmium nickel Chemical compound [Ni].[Cd] OJIJEKBXJYRIBZ-UHFFFAOYSA-N 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6802—Sensor mounted on worn items
- A61B5/681—Wristwatch-type devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/1455—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4887—Locating particular structures in or on the body
- A61B5/489—Blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
- A61B2560/0462—Apparatus with built-in sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14546—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring analytes not otherwise provided for, e.g. ions, cytochromes
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Optics & Photonics (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Description
このような構成とすることにより、非侵襲生体計測装置を腕に固定したのち、装置本体を移動させることなく、撮像部の位置を容易に調整することができる。
このような構成とすることにより、撮像部と、固定部又は装置本体と、撮像部位置調整部とを簡単な構造で接続することができる。
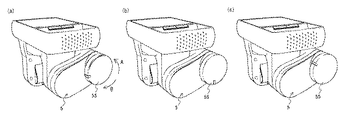
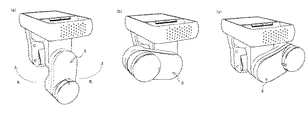
このような構成とすることにより、撮像部位置調整部によって収容部を回転させることによって撮像部の位置を調整することができる。
このような構成とすることにより、撮像部回転部によって撮像部を回転させることが可能となり、撮像部による撮像に適した領域に血管が位置するよう、撮像領域の調整を行なうことができる。
このような構成とすることにより、使用者は、表示部の画面に表示された指標にしたがって、又は表示部の画面上に設けられた指標部材にしたがって位置調整することで、撮像部による撮像に適した領域に撮像部が位置するように位置調整を簡単に行うことが可能となる。
このような構成とすることにより、使用者は、表示部の画面を見ながら撮像部の位置調整を行なうことができる。
このような構成とすることにより、第1の固定部材と第2の固定部材とによって腕を挟持することができ、簡単な構成によって装置本体を生体に固定することができる。
このような構成とすることにより、装置本体の腕への取り付け及び取り外しが容易となる。さらに、第1の固定部材と第2の固定部材との間隔を調整して腕を挟持することにより、使用者毎に異なる腕の太さに対応することができる。
このような構成とすることにより、第1の固定部材と第2の固定部材とによって腕を押圧しながら挟持することができ、装置本体が腕から外れにくくなる。
このような構成とすることにより、離脱防止部材によって腕の離脱が防止されるため、装置本体が腕からより外れにくくなる。
このような構成とすることにより、次のような効果を奏する。すなわち、掌側と手の甲側の太さは個人差が小さいため、使用者ごとに異なる腕の太さに対応しやすくなる。また、腕の掌側と手の甲側を挟む構成としたことにより、第1の固定部材及び第2の固定部材と、腕との接触面積を大きく確保することができ、装置本体が腕から外れにくくなる。
このような構成とすることにより、使用者は、示唆手段によって示唆される方向に従って撮像部を移動させることができ、撮像に適した領域に撮像部を移動させることが容易になる。
このような構成とすることにより、使用者は、所定期間毎に随時更新される撮像部を移動すべき方向を確認しながら、撮像部が撮像に適した領域に位置するよう位置調整することができる。
このような構成とすることにより、使用者は、示唆手段によって示唆される方向に従って撮像部を移動させたのち、取得指示手段によって撮像に適した領域と撮像部の位置との関係の取得を指示することにより、任意のタイミングで撮像部を移動すべき方向を更新することができる。
図2は本実施の形態に係る非侵襲生体計測装置の分解斜視図である。以下、図2を参照しながら、非侵襲生体計測装置の構成部材について説明したのち、構成部材の組み立てについて説明する。
メインメモリ100bは、SRAM又はDRAM等によって構成されている。メインメモリ100bは、フラッシュメモリカード100jに記憶されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU100aの作業領域として利用される。
画像入力インタフェース100fは、A/D変換器を含むビデオデジタイズ回路(図示せず)を備えている。画像入力インタフェース100fは、CCD撮像素子62に電気信号線によって電気的に接続されており、当該CCD撮像素子62から、画像信号が入力されるようになっている。CCD撮像素子62から入力された画像信号は、画像入力インタフェース100fでA/D変換される。このようにデジタル変換された画像データは、フレームメモリ100eに格納される。
装置本体2の組み立てについて図2を参照して説明する。まず、表示部8が上側ハウジング21の上面に設けられた窪み21aに嵌め込まれる。上側ハウジング21の上面に設けられた開口部21cには下側から操作キー91が嵌め込まれ、さらに操作キー91の下部にスイッチ基板92が接続される。次に、表示部8及び制御部10が上側ハウジング21に取り付けられる。
このような構成の非侵襲生体計測装置1は、以下のようにして使用者の腕に装着される。まず、図1に示す状態からスライド部材4の連結壁部41cと装置本体2とを手で掴んで握ると、スライド部材4が装置本体2に対してY2方向にスライド移動し、同時に第2固定部材43と第1固定部材25との間隔が広がる。この状態の非侵襲生体計測装置1を図9に示す。
図10からも明らかなように、撮像部6が手首に当接するように非侵襲生体計測装置1を一方の腕(図10においては左腕)に装着し、肘を90度曲げた状態で掌を他方の腕(右腕)に向けると、表示部8の表示画面は上向きになる。これにより、使用者は表示部8の表示画面に表示された位置決め画面(図16参照)を確認しながら、撮像部6の位置調整を行なうことができる。さらにこのとき、離脱防止部材11は下側が弾性的に押圧された状態で突出している。これにより、離脱防止部材11は、第1個体部材3と第2固定部材43との間に挟まれた腕を下方から支えるように機能し、非侵襲生体計測装置1の腕からの脱落が防止される。
次に、非侵襲生体計測装置1の測定動作について説明する。図11は、非侵襲生体計測装置1による測定動作を示すフローチャートである。まず図10に示すようにして、使用者の腕に非侵襲生体計測装置1が装着され、さらに、撮像部6が手首に当接するように、撮像部6の位置が撮像部位置調整部7によって粗調整される。次に、使用者が、非侵襲生体計測装置1に設けられた「開始/終了」キー91aを押して、非侵襲生体計測装置1の電源を入れると、ソフトウェアの初期化が行われるとともに各部の動作チェックがおこなわれ(ステップS1)、装置はスタンバイ状態となり、表示部8にスタンバイ状態のスタンバイ画面が表示される(ステップS2)。
CPU100aは、ステップS15の判定処理において、血管パターン401が領域401c内に位置していないと判断すると、ステップS161において、血管パターン401と領域401cとの位置関係を取得する処理を実行する。ここでいう位置関係とは、例えば、血管パターン401が領域401cの左右のどちらに位置しているか、又は血管パターン401が部分的に領域401c内に位置しているかどうか、撮像部6を回転させれば血管パターン401全体が領域401c内に収まるかどうか、などに関する情報である。
同様に、図18(b)に示すように、血管パターン401が領域401cより左側に位置している場合には、CPU100aは、まずステップS162の処理において撮像部6を移動すべき方向を「左」と決定する。次に、CPU100aは、ステップS163の処理において撮像部6を左方向へ移動させるよう示唆するための矢印402a、402bを領域401cの右側に表示させるとともに、メニュー表示領域403に位置調整を促すメッセージを表示させる処理を実行する。
S=(cg2−cg1)/{(h1+h2)/2}……(1)
また、CPU100aは、ステップS105により得られた輝度プロファイルPF1、ステップS110により得られた輝度プロファイルPF2に基づいて、血管の左右の光源(発光ダイオードR1、R2、及び発光ダイオードL1、L2)の光量比及び光量を算出し(ステップS112)、得られた結果に基づいて両光源の光量調整を行う(ステップS113)。
D=h/wn……(2)
ただし、nは、散乱による半値幅の広がりの非線形を表す定数である。光散乱のない場合は、n=1、散乱のある場合はn>1である。
Do=D×fs×fm……(7)
CPU100aは、ステップS121での算出結果をフレームメモリ100eに記憶し(ステップS122)、主ルーチンに戻る。
2 装置本体
21 上側ハウジング
22 下側ハウジング
23 液晶カバー
24 バッテリカバー
25 第1固定部材
26 カバー部材
4 スライド部材
40 スライド部材本体
41 フレーム部材
42 連結部
43 第2固定部材
47 背面カバー
5 収容部
51 内側ハウジング
52 タレット
54 外側ハウジング
55 撮像部回転部
6 撮像部
61 保持板
62 CCD撮像素子
7 撮像部位置調整部
8 表示部
9 操作部
10 制御部
Claims (10)
- 生体を撮像するための撮像部と、
撮像部が撮像することにより得られた画像を解析して生体情報を取得するための解析部を備える装置本体と、
装置本体を生体に対して固定するための固定部と、
装置本体が生体に対して固定された状態で、生体に対する撮像部の位置を調整するための撮像部位置調整部と、
撮像部による撮像に適した領域と撮像部の位置との位置関係を取得する位置関係取得手段と、
位置関係取得手段によって取得された位置関係に基づいて、撮像部を移動すべき方向を示唆する示唆手段と、を備え、
撮像部位置調整部は、一端において撮像部を保持し、他端において固定部又は装置本体に回転可能に接続されており、
位置関係取得手段は、所定期間毎に位置関係を取得し、
示唆手段は、位置関係取得手段が位置関係を取得する毎に、撮像部を移動すべき方向を更新するように構成されている非侵襲生体計測装置。 - 撮像部を収容するための収容部をさらに備え、
収容部は、撮像部位置調整部を介して固定部または装置本体に接続されている請求項1に記載の非侵襲生体計測装置。 - 撮像部を収容部内で回転させるための撮像部回転部をさらに備える請求項1に記載の非侵襲生体計測装置。
- 撮像部により撮像された生体画像を表示する表示部をさらに備え、
撮像部による撮像に適した領域を示す指標が生体画像とともに表示部に表示され、又は表示部に生体画像が表示されるとともに撮像部による撮像に適した領域を示す指標部材が表示部の画面上に設けられている請求項1〜3のいずれか一項に記載の非侵襲生体計測装置。 - 装置本体は、表面側と背面側とを有し、
表示部は、装置本体の表面側に設けられており、
固定部は、装置本体の背面側に設けられている請求項1〜4のいずれか一項に記載の非侵襲生体計測装置。 - 固定部は、腕を挟持するための第1の固定部材と、第1の固定部材と所定の間隔をあけて配置された第2の固定部材とを備える請求項1〜5のいずれか一項に記載の非侵襲生体計測装置。
- 第2の固定部材は、装置本体に対して摺動可能に担持され、
第1の固定部材と第2の固定部材との間隔が調整可能であることを特徴とする請求項6に記載の非侵襲生体計測装置。 - 第1の固定部材及び第2の固定部材のうち少なくとも一方は、互いに間隔が狭まる方向に付勢されている請求項7に記載の非侵襲生体計測装置。
- 第1の固定部材及び第2の固定部材のうち少なくとも一方は、第1の固定部材と第2の固定部材とによって挟持された腕の離脱を防止するための離脱防止部材をさらに備える請求項6〜8のいずれか一項に記載の非侵襲生体計測装置。
- 位置関係取得手段による位置関係の取得を指示する取得指示手段をさらに備え、
位置関係取得手段は、取得指示手段によって位置関係の取得が指示されると、位置関係を取得し、
示唆手段は、位置関係取得手段が位置関係を取得する毎に、撮像部を移動すべき方向を更新する請求項1〜9のいずれか一項に記載の非侵襲生体計測装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007336392A JP5274829B2 (ja) | 2007-12-27 | 2007-12-27 | 非侵襲生体計測装置 |
| AT08022265T ATE497724T1 (de) | 2007-12-27 | 2008-12-22 | Vorrichtung und verfahren zur nichtinvasiven messung eines lebenden körpers |
| EP08022265A EP2074938B1 (en) | 2007-12-27 | 2008-12-22 | A noninvasive living body measuring device and a noninvasive living body measuring method |
| DE602008004876T DE602008004876D1 (de) | 2007-12-27 | 2008-12-22 | Vorrichtung und Verfahren zur nichtinvasiven Messung eines lebenden Körpers |
| US12/317,553 US20090169078A1 (en) | 2007-12-27 | 2008-12-23 | Noninvasive living body measuring device and a noninvasive living body measuring method |
| CN2008101765819A CN101467885B (zh) | 2007-12-27 | 2008-12-25 | 无创生物测定装置及无创生物测定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007336392A JP5274829B2 (ja) | 2007-12-27 | 2007-12-27 | 非侵襲生体計測装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009153782A JP2009153782A (ja) | 2009-07-16 |
| JP2009153782A5 JP2009153782A5 (ja) | 2011-02-10 |
| JP5274829B2 true JP5274829B2 (ja) | 2013-08-28 |
Family
ID=40363506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007336392A Active JP5274829B2 (ja) | 2007-12-27 | 2007-12-27 | 非侵襲生体計測装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20090169078A1 (ja) |
| EP (1) | EP2074938B1 (ja) |
| JP (1) | JP5274829B2 (ja) |
| CN (1) | CN101467885B (ja) |
| AT (1) | ATE497724T1 (ja) |
| DE (1) | DE602008004876D1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6126609B2 (ja) | 2012-09-28 | 2017-05-10 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 口腔内検査装置及びその情報表示方法 |
| JP6594620B2 (ja) * | 2013-12-20 | 2019-10-23 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 光脳機能計測装置 |
| EP3066977A1 (en) * | 2015-03-13 | 2016-09-14 | Biowatch SA | A biometric sensor in a wristwatch or wristband for detection of wrist blood vessels |
| EP3073414B1 (en) * | 2015-03-27 | 2019-07-24 | Biowatch SA | A biometric sensor for detection of wrist blood vessels in a wrist strap |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE59900583D1 (de) * | 1999-03-29 | 2002-01-31 | Hoffmann La Roche | Vorrichtung zur quantitativen Bestimmung der örtlichen Verteilung einer Messgrösse |
| JP4236950B2 (ja) * | 2003-02-13 | 2009-03-11 | シスメックス株式会社 | 非侵襲生体計測装置 |
| EP1635696A2 (en) * | 2003-06-09 | 2006-03-22 | Glucon Inc. | Wearable glucometer |
| JP2006000182A (ja) * | 2004-06-15 | 2006-01-05 | Olympus Corp | 光学式生体情報測定装置 |
| JP4616681B2 (ja) * | 2005-03-30 | 2011-01-19 | 斎藤 建夫 | 血管観察用プローブおよび血管観察装置 |
| JP2008545502A (ja) * | 2005-06-10 | 2008-12-18 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 患者又は動物の皮膚の表面にわたってプローブを案内するシステム |
| EP1743570B1 (en) | 2005-07-12 | 2009-02-18 | Sysmex Corporation | Non-invasive living body measuring device |
| JP4863793B2 (ja) * | 2005-07-12 | 2012-01-25 | シスメックス株式会社 | 非侵襲生体計測装置 |
| JP5025159B2 (ja) * | 2006-04-28 | 2012-09-12 | シスメックス株式会社 | 生体成分測定装置 |
-
2007
- 2007-12-27 JP JP2007336392A patent/JP5274829B2/ja active Active
-
2008
- 2008-12-22 AT AT08022265T patent/ATE497724T1/de not_active IP Right Cessation
- 2008-12-22 DE DE602008004876T patent/DE602008004876D1/de active Active
- 2008-12-22 EP EP08022265A patent/EP2074938B1/en not_active Not-in-force
- 2008-12-23 US US12/317,553 patent/US20090169078A1/en not_active Abandoned
- 2008-12-25 CN CN2008101765819A patent/CN101467885B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101467885A (zh) | 2009-07-01 |
| ATE497724T1 (de) | 2011-02-15 |
| DE602008004876D1 (de) | 2011-03-24 |
| JP2009153782A (ja) | 2009-07-16 |
| EP2074938B1 (en) | 2011-02-09 |
| EP2074938A1 (en) | 2009-07-01 |
| US20090169078A1 (en) | 2009-07-02 |
| CN101467885B (zh) | 2011-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7962189B2 (en) | Non-invasive living body measuring device | |
| US20190273890A1 (en) | Devices and methods for identifying and monitoring changes of a suspect area of a patient | |
| JP4236950B2 (ja) | 非侵襲生体計測装置 | |
| EP1866637B1 (en) | Body fluid testing component for analyte detection | |
| CN102216782B (zh) | 血液成分测定装置 | |
| EP0801297A1 (en) | Method and apparatus for measuring light projection concentration | |
| US12014500B2 (en) | Healthy-Selfie(TM): methods for remote medical imaging using a conventional smart phone or augmented reality eyewear | |
| US20090005661A1 (en) | Non-invasive blood component measuring device and non-invasive blood component measuring method | |
| EP1905351B1 (en) | Nonivasive living body measuring device and noninvasive living body measuring method | |
| JP4863793B2 (ja) | 非侵襲生体計測装置 | |
| JP5208112B2 (ja) | 非侵襲生体計測装置、および非侵襲生体計測方法 | |
| JP4963921B2 (ja) | 非侵襲生体計測装置 | |
| US11308618B2 (en) | Healthy-Selfie(TM): a portable phone-moving device for telemedicine imaging using a mobile phone | |
| JP5274829B2 (ja) | 非侵襲生体計測装置 | |
| JP2007244600A (ja) | 脈波検出方法及び装置 | |
| JP2000262496A (ja) | 無侵襲生体計測装置 | |
| CN211460180U (zh) | 一种单点可滑动脉像诊断器 | |
| JP5137606B2 (ja) | 非侵襲血液成分計測装置、非侵襲的に血液成分を計測するための方法及びコンピュータプログラム | |
| JP4912814B2 (ja) | 非侵襲生体計測装置 | |
| CN105816177B (zh) | 指甲生长检测仪以及检测方法 | |
| JP2020524564A (ja) | 健診機器 | |
| CN111035372A (zh) | 一种单点可滑动脉像诊断器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101216 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110812 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130515 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5274829 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |