JP5268836B2 - 移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 - Google Patents
移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 Download PDFInfo
- Publication number
- JP5268836B2 JP5268836B2 JP2009206584A JP2009206584A JP5268836B2 JP 5268836 B2 JP5268836 B2 JP 5268836B2 JP 2009206584 A JP2009206584 A JP 2009206584A JP 2009206584 A JP2009206584 A JP 2009206584A JP 5268836 B2 JP5268836 B2 JP 5268836B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- base station
- mobile device
- mobile
- communication system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
Description
ハンドオフを起動するためのメッセージの例としては、非特許文献1に記載されたCDMA2000 1X EV-DO (Evolution Data Only(Optimized))システムにおける位置登録メッセージであるルートアップデートメッセージ(Route Update Message)がある。このメッセージには、移動機周辺にある基地局のパイロット信号の受信強度、干渉状態といった通信品質情報も含まれている。Route Update Messageは、セルまたはセクタの境界に位置する移動機から多く送信される傾向がある。
特許文献1は、位置情報に基づいたサービスを行うことができるエリアを拡大することを目的としてなされたもので、3つの基地局からの信号が受信できる場合には、三角測量による位置計算を行う。2つの基地局からしか信号を受信できない場合には、過去の位置計算で使用した位置計算情報から、信号を受信できる2つの基地局とは異なる1つの基地局の位置計算情報を選出し、三角測量に基づく位置計算を行う。1つの基地局からしか信号を受信できない場合には、過去の位置計算で使用した位置計算情報から、信号を受信できる基地局とは異なる2つの基地局の位置計算情報を選出し、三角測量に基づく位置計算を行う。
まず、本発明を適用するシステム全体の構成について説明する。
図1は、本発明を適用するシステム全体の構成を説明する図である。
位置標定処理用PC 601は、マッピングテンプレートに呼処理データ分析サーバー 501から受信した、各移動機が示す各種品質(パイロット強度、呼接続状況など)情報と、位置標定結果と、地図情報、基地局位置情報、マッピングテンプレート情報に基づき、移動機から送られてきた各種通信品質情報をマッピングし、通信品質情報の種類別にエリア品質マップを作成する。
CDMA2000 1X EV-DOシステムでは、背景技術の欄で説明したように、移動機はハンドオフを起動するとき等に基地局に対してRoute Update Request Messageを送信する。このメッセージには、移動機周辺にある基地局のパイロット信号の受信強度、干渉状態といった通信品質情報が含まれている。さらに、Route Update Request Messageには、パイロット信号の往復遅延情報も含まれている。往復距離の算出は基地局から送信された、送信絶対時間txcを含む信号を移動機が受信して基地局へ再送信する。基地局で移動機が再送信した信号を受信することで、受信した絶対時間trcとの相対差τrが伝送遅延時間となる。この伝送遅延時間τrから往復距離(Round・Trip・Delay)が算出できる。
ここまでで、移動機が、パイロット信号を送信している基地局を中心とし、往復遅延情報から算出した距離を半径とした円周上に存在することがわかる。
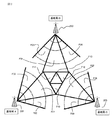
図2は、位置標定を行うためのマッピングテンプレートを説明する図である。
本発明のマッピングテンプレートは、ハンドオフ領域を元にしたものである。CDMA2000 1X EV-DOシステムにおいては、基地局3局を用いた三角測量で移動機の位置標定を行うことができなかったが、本発明のマッピングテンプレートを用いることにより、基地局の位置標定を行うことが可能となる。図2には、3つの基地局201、202、203が隣接している様子を示している。それぞれの基地局は3セクタ構成の基地局である。基地局A 201のセクタがカバーする範囲は、基地局A 201を中心とした扇形F01、F02、F03で表した範囲である。このうちF02とF03は、基地局A 201の他のセクタとのセクタ境界領域である。同様に基地局B 202のセクタは基地局B 202を中心とした扇形F04、F05、F06で表した範囲であり、F05とF06は、基地局B 202の他のセクタとのセクタ境界領域である。基地局C 203のセクタがカバーする範囲は、基地局C 203を中心とした扇形F07、F08、F09で表した範囲であり、F08とF09は、基地局C 203の他のセクタとのセクタ境界領域である。
図の領域F10は基地局A 201と基地局C 203 のセル境界、領域F11は基地局A 201と基地局B 202 のセル境界、領域F13は基地局B 202と基地局C 203 のセル境界領域である。領域F13は、基地局A 201、基地局B 202、基地局C 203のセル境界領域である。
領域F01は、セクタ境界でもセル境界でもなく、移動機は常に1基地局(基地局A 201)の1つのセクタと通信していると考えられる。(1Way領域)
次に、この1Way領域F01外側のF10とF11領域について説明する。F10とF11は、周辺セルとのハンドオフ領域であり、移動機は、2つの異なる基地局と通信していると考えられる。そこでこの領域を隣接基地局の隣接セル間のハンドオフ(ソフト)領域(2Way)とする。
隣接基地局の隣接セル間のハンドオフ(ソフト)領域は、該当セクタ間の通信を確保して(2Way)、品質向上を図っている。
さらに3セクタ間のハンドオフ領域(3Way)F13がある。
メッセージとして、CDMA2000 1X EV-DOシステムにおけるRoute Update Request Messageを用いる。基地局と移動機間では、呼接続、ハンドオフ時、呼切断時にRoute Update Messageのやり取りが行われている。Route Update Request Messageには、時間情報、移動機のID情報、呼種別ID、状態パラメータ、接続状況パラメータ、解析パラメータ等が含まれる。このうち、状態パラメータには、パイロット信号の往復遅延情報(Round・Trip・Delay)が含まれている。また、接続状況パラメータには、移動機が接続している基地局識別符号(PN符号)と、それらの基地局からの信号の受信品質情報が含まれている。
図3に、基地局制御部の呼詳細情報ログのデータ構成例を示す。
CDLデータは、Route Update Request Messageなどの呼処理メッセージを一時的に格納しており、複数の移動機それぞれについて、移動機IDをヘッダにして、移動機位置(PN,ハンドオフ)、距離、品質(パイロット強度、EC/IOなど)、移動機状態(CFCカウント)をデータ取得時間を軸にしたデータ構造となっている。そのため、移動機の位置標定ができると、移動機分布に合わせて品質や移動機状態を表示できるようになる。
また、接続状態パラメータには、コネクション状態を示す情報も含まれる。このコネクション状態情報をマッピングテーブルに表示することで、エリア毎のコネクション状態マップが作成できる。また、接続状態パラメータには、ハンドオフ候補を示す情報も含まれる。この情報をマッピングテーブルに表示することで、エリア毎のハンドオフ候補のカウントマップが作成できる。さらに、Route Update Request Messageの解析パラメータには、呼接続や呼切断を示す情報が含まれている。この情報をマッピングテーブルに表示することで、エリア毎の呼接続状況解析マップが作成できる。
まず、呼処理データ分析サーバー501から、位置標定処理用PC 601に位置標定が必要な基地局を含むCDL(Call Detail Log)データが入力される。位置標定処理用PC 601は、ステップ401で各基地局のRoute Update Messageから移動機位置標定に必要な往復距離(Round・Trip・Delay)と基地局識別符号(PN)を抽出する。ステップ402で各基地局識別符号(PN)毎にデータを分類しハンドオフ領域1Way,2Way,3Wayの識別を行う。S403で1Way,2Way,3Wayと基地局内の呼かセル間をまたいだ呼であるかと往復距離(Round・Trip・Delay)を組み合わせ、準備されているマッピングテンプレートに配置する。
図5は、往復距離(Round・Trip・Delay)と基地局識別符号(PN)を基に位置標定マッピングテンプレートを用いて位置標定を行った例を示している。
P02は、基地局B202のセクタと隣接しているセクタの2Way呼の移動機位置標定例を示す。
P12は、基地局A201のセクタと隣接している基地局C 203のセクタとの2Way呼の移動機位置標定を示す。
P03は、基地局A201のセクタ、基地局B202のセクタ、基地局C203のセクタからなる3Way呼の移動機位置標定例を示す。
本発明によれば、基地局装置側、移動機側共に追加機能を施すことなく、現状のデータ構成で、三角測量原理を使えない状況にあっても、位置標定が可能となる。
移動機の位置標定が可能になることにより、端末からの情報によりエリアのトラフィック分布の確認、昼、夜など時間帯別のトラフィックデータの分布などを地図情報に対応付けたマップを作成することで確認し、対応や、改善策の検討に役立てることができる。
また、往復距離(Round・Trip・Delay)と基地局識別符号(PN)と同時に報告されてきた、品質値や呼接続状態コードを、位置標定マッピングテンプレートに描画することで、移動機が置かれた通信品質状況を、グラフィカルに面的に把握が可能となる。
さらに、位置標定マッピングテンプレートを地図にあわせて表示することによりエリア全体の呼量や品質状況をビジュアルに確認することができる。
201〜203 基地局
301 基地局制御部
311 呼詳細情報ログ(CDL:Call Detail Log)
401 保守網
501 呼処理分析サーバー
601 位置標定処理用PC
Claims (5)
- 複数の移動機と複数の基地局と前記複数の基地局を制御する基地局制御部とを有する移動通信システムにおいて前記移動機の位置を標定し、標定した位置情報と地図情報を対応付けたマッピングデータを作成し、該マッピングデータに移動機に関する情報を表示する方法であって、
前記移動通信システムは、移動機が前記複数の基地局のうちの1つ以上の基地局を介した複数の通信路を設定することができる移動通信システムであり、
前記移動機が、呼接続時またはハンドオフ要求時または切断時に基地局を介して前記基地局制御部に送信するメッセージは、前記移動機と基地局との距離に関する情報と、前記移動機における通信品質情報が含まれ、
前記メッセージに含まれる前記移動機と基地局との距離に関する情報および前記通信路を設定している基地局の数および基地局識別情報に基づいて、前記移動機の位置を標定し、
前記標定した結果を地図情報と対応付けたマップを作成し、
前記マップに前記メッセージに含まれる前記通信品質情報を表示することを特徴とする移動通信システムにおける移動機情報表示方法。 - 前記メッセージには、前記通信品質情報として、基地局別の受信品質情報が含まれ、該受信品質情報を、マッピングテーブルに表示することで、エリア毎の受信品質マップを作成し表示することを特徴とする請求項1に記載の移動通信システムにおける移動機情報表示方法。
- 前記メッセージには、前記通信品質情報として、コネクション状態に関する情報が含まれ、該コネクション状態情報をマッピングテーブルに表示することで、エリア毎のコネクション状態マップを作成し表示することを特徴とする請求項1に記載の移動通信システムにおける移動機情報表示方法。
- 前記メッセージには、前記通信品質情報として、ハンドオフ候補に関する情報が含まれ、該ハンドオフ候補に関する情報をマッピングテーブルに表示することで、エリア毎のハンドオフ候補のカウントマップを作成し表示することを特徴とする請求項1に記載の移動通信システムにおける移動機情報表示方法。
- 前記メッセージには、前記通信品質情報として、呼接続や呼切断を示す情報が含まれ、該呼接続および呼切断を示す情報をマッピングテーブルに表示することで、エリア毎の呼接続状況解析マップを作成し表示することを特徴とする請求項1に記載の移動通信システムにおける移動機情報表示方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009206584A JP5268836B2 (ja) | 2009-09-08 | 2009-09-08 | 移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009206584A JP5268836B2 (ja) | 2009-09-08 | 2009-09-08 | 移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011061336A JP2011061336A (ja) | 2011-03-24 |
| JP5268836B2 true JP5268836B2 (ja) | 2013-08-21 |
Family
ID=43948499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009206584A Expired - Fee Related JP5268836B2 (ja) | 2009-09-08 | 2009-09-08 | 移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5268836B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112119320B (zh) * | 2018-05-23 | 2024-03-22 | 利拉伐控股有限公司 | 用于定位动物标签的系统、确定中间基站的位置的方法 |
| DE102019213477A1 (de) * | 2019-09-05 | 2021-03-11 | Robert Bosch Gmbh | Bedieneinrichtung, Netzwerkanordnung mit der Bedieneinrichtung und Funkverbindungssicherungsverfahren für die Bedieneinrichtung |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4969335B2 (ja) * | 2007-02-23 | 2012-07-04 | 株式会社エヌ・ティ・ティ・ドコモ | 測位システム、測位方法及び測位プログラム |
| JP5052244B2 (ja) * | 2007-07-20 | 2012-10-17 | 株式会社エヌ・ティ・ティ・ドコモ | 無線通信システム |
-
2009
- 2009-09-08 JP JP2009206584A patent/JP5268836B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011061336A (ja) | 2011-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109803323B (zh) | 建立与多个网络的通信以实现跨多个网络的连续通信覆盖 | |
| CN110958630B (zh) | 一种测量方法及设备 | |
| US8483707B2 (en) | Wireless terminal and method for managing the receipt of position reference singals for use in determining a location | |
| US10531347B2 (en) | Positioning method and apparatus for different time division duplex uplink-downlink configurations | |
| US20250274897A1 (en) | Training and Inference for AI-Based Positioning | |
| EP4402956B1 (en) | Device positioning | |
| CN108307297A (zh) | 使用多频带无线网络系统的室内定位和跟踪 | |
| EP2957922B1 (en) | Locating mobile users in emergency | |
| CN103957594A (zh) | 一种终端定位的方法及装置 | |
| JP7428255B2 (ja) | 通信システム、接続先制御方法、制御装置、及びプログラム | |
| WO2021032907A1 (en) | Providing location information | |
| CN103687001B (zh) | 一种进行定位的方法和设备 | |
| WO2018014793A1 (zh) | 一种定位方法及装置 | |
| CN117480791A (zh) | 用于无线装置的推迟定位的方法和设备 | |
| CN105338624A (zh) | 辅助定位的方法及装置 | |
| CN102056261A (zh) | 一种切换判决方法及装置 | |
| KR101639204B1 (ko) | 컴퓨팅 장치의 글로벌 위치를 결정하기 위해 측지 삼각 측량을 사용하고 용이하게 하기 위한 메커니즘 | |
| JP5268836B2 (ja) | 移動通信システムおよび移動通信システムにおける移動機の位置標定方法ならびに移動機情報表示方法。 | |
| CN107277761A (zh) | 一种终端位置发送方法及装置 | |
| WO2025077215A1 (zh) | 通信方法和装置、以及存储介质 | |
| CN1871867B (zh) | 虚拟蜂窝无线电网络 | |
| WO2023117057A1 (en) | Devices and methods for sidelink positioning in a mobile communication network | |
| JP7409510B2 (ja) | 通信システム、接続先制御方法、制御装置、及びプログラム | |
| CN115396973B (zh) | 上行干扰抑制方法、装置及存储介质 | |
| US9462418B2 (en) | Augmentation of call data information to determine a location of a wireless communication device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130122 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130322 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130507 |
|
| LAPS | Cancellation because of no payment of annual fees |