JP5266846B2 - 測位方法、プログラム及び測位装置 - Google Patents
測位方法、プログラム及び測位装置 Download PDFInfo
- Publication number
- JP5266846B2 JP5266846B2 JP2008094954A JP2008094954A JP5266846B2 JP 5266846 B2 JP5266846 B2 JP 5266846B2 JP 2008094954 A JP2008094954 A JP 2008094954A JP 2008094954 A JP2008094954 A JP 2008094954A JP 5266846 B2 JP5266846 B2 JP 5266846B2
- Authority
- JP
- Japan
- Prior art keywords
- kalman filter
- model
- value
- positioning
- likelihood
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Description
Yaakov Bar-Shalom, X.Rong Li, Thiagalingam Kirubarajan著、「Estimation with Applications to Tracking and Navigation」、(米国)、JOHN WILEY & SONS INC、2001年、p.92−93、453−457
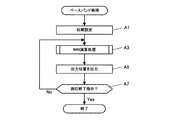
図1は、本実施形態におけるインタラクティブミキシングモデル(Interactive Mixing Model:以下、「IMM」と称す。)の概要を説明するための図である。ここでは、説明を分かりやすくするため、複数の処理回路ブロックにおける演算によってIMM演算が実現されるものとして説明するが、単独のプロセッサによってIMM演算を実現することも可能であり、図2及び図3の処理フローの説明においては単独のプロセッサにより実行するものとして説明する。
先ず、CPUは、モデル間遷移確率「p」を取得する(ステップS1)。モデル間遷移確率「p」は、次式(1)に示すようなn×nの行列で与えられる。

次に、KFモデルが、第1KFモデル及び第2KFモデルの2つである場合に、各KFモデルそれぞれについてモデル確率「μ」を算出した場合の実験結果について説明する。ここでは、第1KFモデルの尤度指標値「Vx1」を「−20」、第1KFモデルの尤度指標値「Vx2」を「−21」として実験を行った。KFモデルが2つである場合は、次式(18)及び(19)に従ってモデル確率「μ1」及び「μ2」を算出する。
次に、測位装置を備えた電子機器の一種である携帯型電話機に上述した原理を適用した場合の実施例について説明する。但し、上述した原理の適用可能な実施例がこれに限定されるわけではない。
図8は、本実施例における携帯型電話機1の機能構成を示すブロック図である。携帯型電話機1は、GPSアンテナ10と、GPS受信部20と、TCXO(Temperature Compensated Crystal Oscillator)40と、ホストCPU(Central Processing Unit)50と、操作部60と、表示部70と、携帯電話用アンテナ80と、携帯電話用無線通信回路部90と、ROM(Read Only Memory)100と、RAM(Random Access Memory)110とを備えて構成される。
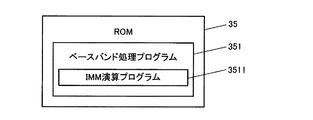
図9は、ベースバンド処理回路部30のROM35に格納されたデータの一例を示す図である。ROM35には、測位演算部33により読み出され、ベースバンド処理(図13参照)として実行されるベースバンド処理プログラム351が記憶されている。また、ベースバンド処理プログラム351には、IMM演算処理(図2及び図3参照)として実行されるIMM演算プログラム3511がサブルーチンとして含まれている。
図13は、測位演算部33によりROM35に記憶されているベースバンド処理プログラム351が読み出されて実行されることで、携帯型電話機1において実行されるベースバンド処理の流れを示すフローチャートである。ベースバンド処理は、RF受信回路部21によるGPS衛星信号の受信と併せて、測位演算部33が、操作部60に測位開始指示の操作がなされたことを検出した場合に実行を開始する処理であり、各種アプリケーションの実行といった各種の処理と並行して行われる処理である。
本実施形態によれば、カルマンフィルタ処理それぞれの尤度指標値「Vx」が算出され、この尤度指標値「Vx」のカルマンフィルタ処理間の相対値が算出される。そして、算出された相対値を用いてカルマンフィルタ処理それぞれのモデル確率「μ」が算出され、このモデル確率「μ」を用いてカルマンフィルタ処理それぞれの処理結果が合成されることで測位位置が決定される。
5−1.電子機器
本発明は、測位装置を備えた電子機器であれば何れの電子機器にも適用可能である。例えば、ノート型パソコンやPDA(Personal Digital Assistant)、カーナビゲーション装置等についても同様に適用可能である。
上述した実施形態では、衛星測位システムとしてGPSを例に挙げて説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の他の衛星測位システムであってもよい。
測位演算部33が実行する処理の一部又は全部を、ホストCPU50が実行することにしてもよい。例えば、メジャメント取得演算部32から取得したメジャメント実測値を用いて、ホストCPU50がIMM演算を行って出力位置を決定し、当該出力位置を表示部70に表示させる。
21 RF受信回路部、 30 ベースバンド処理回路部、 31 演算制御部、
32 メジャメント取得演算部、 33 測位演算部、 35 ROM、
37 RAM、 40 TCXO、 50 ホストCPU、 60 操作部、
70 表示部、 80 携帯電話用アンテナ、 90 携帯電話用無線通信回路部、
100 ROM、 110 RAM
Claims (6)
- 測位装置が、各カルマンフィルタ処理(1,2,…j)それぞれをモデルとみなし、前記カルマンフィルタ処理それぞれの処理結果を所定のモデル確率で重みづけして合成するインタラクティブミキシングモデル(Interactive Mixing Model)演算(以下「IMM演算」と称す。)を行って測位する測位方法であって、
当該カルマンフィルタ処理の状態ベクトル及び誤差共分散と所与のメジャメント実測値とに基づいて、前記カルマンフィルタ処理それぞれについての、当該メジャメント実測値の尤度を示す尤度関数の指数部分を示す尤度指標値(Vx 1 ,Vx 2 ,…Vx j )を算出することと、
前記算出された尤度指標値の前記カルマンフィルタ処理間の相対値(当該カルマンフィルタ処理jに関する相対値は(Vx 1 −Vx j ),(Vx 2 −Vx j ),…(Vx n −Vx j ):但しnはカルマンフィルタ処理の総数)を算出することと、
以下の(式1)を用いて前記カルマンフィルタ処理それぞれの前記モデル確率(μ 1 ,μ 2 ,…μ j )を算出することと、
前記算出されたモデル確率を用いて前記カルマンフィルタ処理それぞれの処理結果を合成することで測位位置を決定することと、
を含む測位方法。
- 前記モデル確率を算出することは、前記相対値が所定の範囲内であるか否かを判定することを含み、前記所定の範囲内であると判定された場合に、前記(式1)を用いて前記モデル確率を算出することである、
請求項1に記載の測位方法。 - 前記モデル確率を算出することは、当該相対値が前記所定の範囲の上限以上のときには当該モデル確率を「1」、前記所定の範囲の下限以下のときには当該モデル確率を「1」とすることを含む、
請求項2に記載の測位方法。 - 前記複数のカルマンフィルタ処理には、前記測位装置の移動状態として、停止状態にあることを前提としたカルマンフィルタ処理と、等速移動状態にあることを前提としたカルマンフィルタ処理と、定加速度状態にあることを前提としたカルマンフィルタ処理との3種類のカルマンフィルタ処理が少なくとも含まれる、
請求項1〜3の何れか一項に記載の測位方法。 - 請求項1〜4の何れか一項に記載の測位方法を前記測位装置に内蔵されたコンピュータに実行させるためのプログラム。
- 各カルマンフィルタ処理(1,2,…j)それぞれをモデルとみなし、前記カルマンフィルタ処理それぞれの処理結果を所定のモデル確率で重みづけして合成するIMM演算を行って測位する測位装置であって、
当該カルマンフィルタ処理の状態ベクトル及び誤差共分散と所与のメジャメント実測値とに基づいて、前記カルマンフィルタ処理それぞれについての、当該メジャメント実測値の尤度を示す尤度関数の指数部分を示す尤度指標値(Vx 1 ,Vx 2 ,…Vx j )を算出する指標値算出部と、
前記算出された尤度指標値の前記カルマンフィルタ処理間の相対値((Vx 1 −Vx j ),(Vx 2 −Vx j ),…(Vx n −Vx j ):但しnはカルマンフィルタ処理の総数)を算出する相対値算出部と、
以下の(式2)を用いて前記カルマンフィルタ処理それぞれの前記モデル確率(μ 1 ,μ 2 ,…μ j )を算出するモデル確率算出部と、
前記算出されたモデル確率を用いて前記カルマンフィルタ処理それぞれの処理結果を合成することで測位位置を決定する測位位置決定部と、
を備えた測位装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008094954A JP5266846B2 (ja) | 2008-04-01 | 2008-04-01 | 測位方法、プログラム及び測位装置 |
| US12/413,076 US20090243920A1 (en) | 2008-04-01 | 2009-03-27 | Positioning method, program, and positioning apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008094954A JP5266846B2 (ja) | 2008-04-01 | 2008-04-01 | 測位方法、プログラム及び測位装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009250619A JP2009250619A (ja) | 2009-10-29 |
| JP5266846B2 true JP5266846B2 (ja) | 2013-08-21 |
Family
ID=41116311
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008094954A Expired - Fee Related JP5266846B2 (ja) | 2008-04-01 | 2008-04-01 | 測位方法、プログラム及び測位装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20090243920A1 (ja) |
| JP (1) | JP5266846B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102663771A (zh) * | 2012-03-14 | 2012-09-12 | 北京航空航天大学 | 一种基于协方差交叉的交互式多模型估计方法 |
| US9513374B2 (en) * | 2012-12-10 | 2016-12-06 | Texas Instruments Incorporated | Measurement error covariance in GNSS receiver circuitry, pseudoranges, reference position |
| KR20160002178A (ko) * | 2014-06-30 | 2016-01-07 | 현대자동차주식회사 | 자차 위치 인식 장치 및 방법 |
| CN107993257B (zh) * | 2017-12-28 | 2020-05-19 | 中国科学院西安光学精密机械研究所 | 一种智能imm卡尔曼滤波前馈补偿目标追踪方法及系统 |
| US20210215488A1 (en) * | 2018-05-17 | 2021-07-15 | Robert Bosch Gmbh | Method and Device Used for Filtering Positioning Data |
| US11119187B2 (en) * | 2019-02-19 | 2021-09-14 | GM Global Technology Operations LLC | Resolution of doppler ambiguity in a radar system through tracking |
| WO2020256603A1 (en) * | 2019-06-18 | 2020-12-24 | Telefonaktiebolaget Lm Ericsson (Publ) | User equipment kinematic state estimation |
| CN110426671B (zh) * | 2019-07-04 | 2023-05-12 | 重庆邮电大学 | Wsn中基于模型概率实时修正的imm目标跟踪方法及装置 |
| WO2022018487A1 (en) * | 2020-07-22 | 2022-01-27 | Telefonaktiebolaget Lm Ericsson (Publ) | State estimation for aerial user equipment (ues) operating in a wireless network |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6609080B1 (en) * | 1999-11-22 | 2003-08-19 | Nokia Mobile Phones Ltd | Multiple-model navigation filter with hybrid positioning |
| US6732050B2 (en) * | 2001-05-23 | 2004-05-04 | Nokia Mobile Phones Ltd | Two-stage interacting multiple models filter for use in a global positioning system |
| JP4348535B2 (ja) * | 2004-03-24 | 2009-10-21 | 三菱電機株式会社 | 目標追尾装置 |
| GB0504889D0 (en) * | 2005-03-08 | 2005-08-17 | Advanced System Architecture L | Management of tracking models suitable for demanding defence scenarios |
| AU2007259030B2 (en) * | 2006-06-13 | 2011-08-04 | Bae Systems Plc | Improvements relating to target tracking |
| US7551133B2 (en) * | 2007-04-05 | 2009-06-23 | Sirf Technology, Inc. | GPS navigation using interacting multiple model (IMM) estimator and probabilistic data association filter (PDAF) |
| JP5089281B2 (ja) * | 2007-07-26 | 2012-12-05 | 三菱電機株式会社 | 状態推定装置及び状態推定方法 |
| JP5251090B2 (ja) * | 2007-11-30 | 2013-07-31 | セイコーエプソン株式会社 | 測位方法、プログラム及び測位装置 |
| JP5034935B2 (ja) * | 2007-12-27 | 2012-09-26 | セイコーエプソン株式会社 | 測位方法、プログラム、測位装置及び電子機器 |
-
2008
- 2008-04-01 JP JP2008094954A patent/JP5266846B2/ja not_active Expired - Fee Related
-
2009
- 2009-03-27 US US12/413,076 patent/US20090243920A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009250619A (ja) | 2009-10-29 |
| US20090243920A1 (en) | 2009-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5266846B2 (ja) | 測位方法、プログラム及び測位装置 | |
| JP5034935B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| JP5186873B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| US8373592B2 (en) | Initial position determination method, positioning method, and positioning apparatus | |
| US7777673B2 (en) | Positioning method, positioning device, and program | |
| JP5186874B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| JP5050904B2 (ja) | 現在位置測位方法及び測位装置 | |
| JP5439826B2 (ja) | 位置算出方法及び位置算出装置 | |
| JP2010151459A (ja) | 位置算出方法及び位置算出装置 | |
| US7928902B2 (en) | Positioning method, positioning device, and electronic instrument | |
| US9253751B2 (en) | Method of calculating movement speed and device for calculating movement speed | |
| US20100302030A1 (en) | Initial position determining method, positioning calculating method, and position calculating device | |
| US8670927B2 (en) | Positioning method, program, positioning device, and electronic apparatus | |
| US20120119945A1 (en) | Satellite orbital data compression method, satellite orbital data providing method, satellite orbital data expansion method, server, and positioning apparatus | |
| JP2010175426A (ja) | 位置算出方法及び位置算出装置 | |
| US7961142B2 (en) | Present position locating method, positioning device, and electronic instrument | |
| JP5332333B2 (ja) | 測位方法、プログラム及び測位装置 | |
| JP2008281552A (ja) | 初回測位出力位置演算決定方法、プログラム、記憶媒体、測位装置及び電子機器 | |
| JP2013195324A (ja) | 予測エフェメリス生成方法 | |
| JP2009229293A (ja) | 測位方法、プログラム及び測位装置 | |
| JP2009103489A (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| JP5521284B2 (ja) | 測位方法及び測位装置 | |
| JP2008281551A (ja) | 現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器 | |
| JP2013036958A (ja) | 停止/移動判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120605 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130422 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5266846 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |