JP5259598B2 - 微小電気機械センサ及び微小電気機械センサの操作方法 - Google Patents
微小電気機械センサ及び微小電気機械センサの操作方法 Download PDFInfo
- Publication number
- JP5259598B2 JP5259598B2 JP2009527708A JP2009527708A JP5259598B2 JP 5259598 B2 JP5259598 B2 JP 5259598B2 JP 2009527708 A JP2009527708 A JP 2009527708A JP 2009527708 A JP2009527708 A JP 2009527708A JP 5259598 B2 JP5259598 B2 JP 5259598B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- electrode
- force
- spring constant
- electrodes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5776—Signal processing not specific to any of the devices covered by groups G01C19/5607 - G01C19/5719
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B7/00—Microstructural systems ; Auxiliary parts of microstructural devices or systems
- B81B7/02—Microstructural systems ; Auxiliary parts of microstructural devices or systems containing distinct electrical or optical devices of particular relevance for their function, e.g. microelectro-mechanical systems [MEMS]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5726—Signal processing
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Gyroscopes (AREA)
- Micromachines (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Investigating Or Analyzing Materials By The Use Of Fluid Adsorption Or Reactions (AREA)
- Pressure Sensors (AREA)
Description
−少なくとも1つの移動可能な電極と、
−個別に駆動可能であり、対応する電極信号が供給されるための複数の電極を備え、移動可能な電極と離間して配置されている電極構成とを備え、
上記電極信号は、力の適用、ばね定数及び上記移動可能な電極の読み取り係数の、設定または変更のために静電気的に用いることが可能であり、
−上記電極構成に接続され、上記力の適用に関する信号、上記ばね定数に関する信号、及び上記移動可能な電極の上記読み取り係数に関する信号を供給され、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数に関してもたらされる設定及び/または変更を定義する電極信号生成ユニットをさらに備え、
上記電極信号生成ユニットは、いわば上記力の適用に関する信号、上記ばね定数に関する信号、及び上記移動可能な電極の上記読み取り係数に関する信号に依存して各々の電極信号を生成し、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数が、互いに独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号を互いに整合させる。
複数の上記電極は、第1の軸に関して軸方向に対称に構成される。上記第1の軸は、第2の軸に関して軸方向に対称に、かつ互いに2つの上記電極対を分離する。上記第2の軸は、各々の電極対の、複数の上記電極を互いに分離する。有利な方法では、上記移動可能な電極は、対称である2つの軸の交点に関して中心対称に構成される。
−いわば、力の適用に関する信号、ばね定数に関する信号及び読み取り係数に関する信号に依存し、上記力の適用、上記ばね定数及び上記移動可能な電極の上記読み取り係数に関して行われる設定及び/または変更を定義する電極信号を生成する工程と、
−上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数を静電気的に設定及び/または変更するために、対応する上記電極に上記電極信号を適用する工程とを含み、
複数の上記電極信号が、いわば上記力の適用に関する信号、上記ばね定数に関する信号、及び上記移動可能な電極の上記読み取り係数に関する信号に依存して生成され、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数が、互いに独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号を互いに整合させる。

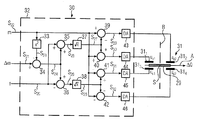
根ユニット57,58に供給される。根ユニット57,58はそれぞれ、第9及び第10の加算器55,56の出力信号バーS25,バーS26の内の1つから根を算出する。根ユニット37,38の出力信号バーS27,バーS28は、第11〜第14の加算器59〜62に供給される。第11〜第14の加算器59〜62により、根ユニット57,58の出力信号バーS27,バーS28は、それぞれ読み取り係数に関する信号バーS22と一度加算されると共にそれぞれ読み取り係数に関する信号バーS22と一度減算される。対応する出力信号バーS29〜バーS32は、デジタル−アナログ変換器63〜66に供給される。デジタル−アナログ変換器63〜46は、(これまではデジタルであった)信号をアナログ信号バーuo1,バーuo2,バーuu1,バーuu2に変換し、アナログ信号バーuo1,バーuo2,バーuu1,バーuu2を対応する電極511〜514に供給する。アナログ信号バーuo1,バーuo2,バーuu1,バーuu2は、本発明の意図する電極信号を表し、力の適用に関する信号バーS20、ばね定数に関する信号バーS21、及び読み取り係数に関する信号バーS22により以下に示す(5)式〜(8)式で表される。
1.定義され、電気的に生成された力を、移動可能な電極に及ぼすことが出来るように意図されている(トルカ(torquer)機能)。
2.定義され、電気的に生成されたばね力を、上記同一の移動可能な電極に及ぼすことが出来るように意図されている。ばね定数は一般に負であり、機械的な振動器の固有振動を定義されたように同調させることを可能にするために、正のばね特性を有する(positive)機械的なばねをある程度まで“よりソフトに(softer)”するように意図されている。
3.上記移動可能な電極のゆがみは、設定される読み取り係数により測定可能となるように意図されている(もぎ取り(pick-off)機能)。
4.1つの意図は、測定中に測定信号が、上記ゆがみ及び上記読み取り係数に依存する成分以外のさらに別のいかなる成分も含まないことを可能とすることである。
C1(x)=C2(−x) (10)
上記事例においては、以下に示す近似式(11)が成立する。
C1(x)=C0(1+a1x+a2x2) (11)
そして以下に示す近似式(12)が成立する。
C2(x)=C0(1−a1x+a2x2) (12)
複数の上記容量において電圧U1,U2が印加されており、上記移動可能な電極の上記作用点における静電力Fは、以下に示す(13)式で示される。
F=(U1 2−U2 2)a1C0+2x(U1 2+U2 2)a2C0 (14)
従って、上記静電力Fは、xから独立している部分とxに比例しばね定数に対応する部分とから成り立つ。xから独立している上記部分はU1 2−U2 2に比例し、上記ばね定数はU1 2+U2 2に比例する。
Co1(x)=Co2(x)=C 0 (1+a1x+a2x2) (15)
Cu1(x)=Cu2(x)=C 0 (1−a1x+a2x2) (16)
同様に、静電力Fに関して以下に示す(17)式が成立する。
F=(Uo1 2+Uo2 2−Uu1 2−Uu2 2)a1C0+2x(Uo1 2+Uo2 2 +Uu1 2 +Uu2 2)a2C0 (17)
従って、距離から独立した項は、(Uo1 2+Uo2 2−Uu1 2−Uu2 2) (18)に比例する。そしてばね定数は、(Uo1 2+Uo2 2+Uu1 2+Uu2 2) (19)に比例する。
Q=Co1Uo1+Co2Uo2+Cu1Uu1+Cu2Uu2 (20)
近似式(15),(16)を(20)式に代入すると、以下の式で示されるように、無視する項及び2次の項が生じる。
Q=2C0(Uo1+Uo2+Uu1+Uu2) (21)
+2C0(Uo1+Uo2−Uu1−Uu2)a1x (22)
上記式の第1の項(21)は、xから独立した漏話であり、一般に望ましくない。第2の部分(22)はxに比例し、それ故にゆがみxの読み取りに適切である。上記2次の項を考慮に入れると、電荷Qは以下の式で表される。
Q=2C0(Uo1+Uo2+Uu1+Uu2)(1+a2x2) (23)
+2C0(Uo1+Uo2−Uu1−Uu2)a1x (24)
上記2次の項は、(漏話を0にする場合、即ち(Uo1+Uo2+Uu1+Uu2)=0とする場合)、定数項と共に消滅する。
1.電荷増幅器の入力における電荷の大きさの総和に関して、ゆがみxから独立した項が無い。
2.電荷増幅器の入力における電荷の大きさの総和に関して、ゆがみxに依存し、ゲイン係数を設定可能な部分が有る。
3.上記移動可能な電極において設定可能であり、ゆがみxから独立した力の効果が有る。
4.上記移動可能な電極においてばね定数を設定可能である静電ばねがある。
Claims (11)
- 少なくとも1つの移動可能な電極と、
個別に駆動可能であり、対応する電極信号が供給されるための複数の電極を備え、上記移動可能な電極と離間して配置されている電極構成とを備え、
上記電極信号は、力の適用、ばね定数及び共振器の読み取り係数の、設定または変更のために静電気的に用いることが可能であり、
−上記電極構成に接続され、上記力の適用に関する信号、上記ばね定数に関する信号、及び上記読み取り係数に関する信号を供給され、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数に関してもたらされる設定及び/または変更を定義する電極信号生成ユニットをさらに備え、
上記電極信号生成ユニットは、上記力の適用に関する信号,上記ばね定数に関する信号及び上記移動可能な電極の上記読み取り係数に関する信号に依存して各々の電極信号を生成し、上記力の適用、上記ばね定数、及び上記共振器の上記読み取り係数が、互いに独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号を互いに整合させることを特徴とする微小電気機械センサ。 - 上記移動可能な電極において生じる電荷の転送を検出する電荷転送ユニットと、
検出された上記電荷の転送に基づき、上記移動可能な電極の瞬時の動きを決定する評価ユニットとを特徴とする請求項1に記載の微小電気機械センサ。 - 上記電極信号生成ユニットは、上記電荷の転送が、上記移動可能な電極の動きと上記読み取り係数の値とから生じるただ1つの電荷転送成分を含むような方法で、いわば上記力の適用に関する信号,上記ばね定数に関する信号,及び上記移動可能な電極の上記読み取り係数に関する信号に依存して各々の電極信号を生成することを特徴とする請求項2に記載の微小電気機械センサ。
- 上記電極構成は、4つの電極を含むことを特徴とする請求項1〜3のいずれか1項に記載の微小電気機械センサ。
- 上記4つの電極は、2つの電極対に分類され、
複数の上記電極は、第1の軸に関して軸方向に対称に構成され、
上記第1の軸は、第2の軸に関して軸方向に対称に、かつ互いに2つの上記電極対を分離し、
上記第2の軸は、各々の電極対の、複数の上記電極を互いに分離することを特徴とする請求項4に記載の微小電気機械センサ。 - 上記移動可能な電極は、対称である2つの軸の交点に関して中心対称に構成されることを特徴とする請求項5に記載の微小電気機械センサ。
- 上記電極信号は、以下の方程式
(Δω)は上記ばね定数に関する信号の値を表し、(m)は上記読み取り係数に関する信号の値を表し、(f)は上記力の適用に関する信号の値を表し、
(uo1,uo2)は、上記第2の軸の上方に横たわっている上記電極信号の値を表し、(uu1,uu2)は、上記第2の軸の下方に横たわっている上記電極信号の値を表すことを特徴とする請求項5に記載の微小電気機械センサ。 -
- 上記移動可能な電極が共振器の一部として表現されることを特徴とする請求項1〜8のいずれか1項に記載の微小電気機械センサ。
- 少なくとも1つの上記移動可能な電極と電気的に接続される第2の移動可能な電極により特徴付けられ、
−上記第2の移動可能な電極から離間して配置されている第2の電極構成を備え、
上記第2の電極構成は、個別に駆動可能であり、対応する電極信号が供給されるための他の複数の電極を有し、
上記電極信号は、力の適用、ばね定数及び上記第2の移動可能な電極の読み取り係数の、設定または変更のために静電気的に用いることが可能であり、
−上記第2の電極構成に接続されており、第2の力の適用に関する信号、第2のばね定数に関する信号、及び第2の読み取り係数に関する信号を供給され、上記力の適用、上記ばね定数、及び上記共振器の上記読み取り係数に関してもたらされる設定及び/または変更を定義する第2の電極信号生成ユニットをさらに備え、
上記電極信号生成ユニットは、上記第2の力の適用に関する信号,上記第2のばね定数に関する信号及び上記第2の読み取り係数に関する信号に依存して各々の電極信号を生成し、上記第2の力の適用、上記第2のばね定数、及び上記第2の移動可能な電極の上記第2の読み取り係数が、互いに独立し、かつ上記力の適用、上記ばね定数、及び少なくとも1つの上記移動可能な電極の上記読み取り係数から独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号を互いに整合させることを特徴とする請求項1〜9のいずれか1項に記載の微小電気機械センサ。 - 少なくとも1つの移動可能な電極と、個別に駆動可能であり、対応する電極信号が供給されるための複数の電極を備え、上記移動可能な電極と離間して配置されている電極構成とを備える微小電気機械センサの操作方法であり、
−力の適用に関する信号、ばね定数に関する信号及び読み取り係数に関する信号に依存し、上記力の適用、上記ばね定数及び上記移動可能な電極の上記読み取り係数に関して行われる設定及び/または変更を定義する電極信号を生成する工程と、
−上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数を静電気的に設定及び/または変更するために、対応する上記電極に上記電極信号を適用する工程とを含み、
複数の上記電極信号が、上記力の適用に関する信号、上記ばね定数に関する信号、及び上記読み取り係数に関する信号に依存して生成され、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数が、互いに独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号を互いに整合することを特徴とする微小電気機械センサの操作方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006043412A DE102006043412A1 (de) | 2006-09-15 | 2006-09-15 | Mikroelektromechanischer Sensor sowie Betriebsverfahren für einen mikroelektromechanischen Sensor |
| DE102006043412.9 | 2006-09-15 | ||
| PCT/EP2007/007028 WO2008031480A1 (de) | 2006-09-15 | 2007-08-08 | Mikroelektromechanischer sensor sowie betriebsverfahren für einen mikroelektromechanischen sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010502998A JP2010502998A (ja) | 2010-01-28 |
| JP5259598B2 true JP5259598B2 (ja) | 2013-08-07 |
Family
ID=38622548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009527708A Expired - Fee Related JP5259598B2 (ja) | 2006-09-15 | 2007-08-08 | 微小電気機械センサ及び微小電気機械センサの操作方法 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US8424382B2 (ja) |
| EP (1) | EP2062009B1 (ja) |
| JP (1) | JP5259598B2 (ja) |
| KR (1) | KR101093883B1 (ja) |
| CN (1) | CN101517359B (ja) |
| AT (1) | ATE541186T1 (ja) |
| AU (1) | AU2007296984B2 (ja) |
| CA (1) | CA2661525C (ja) |
| DE (1) | DE102006043412A1 (ja) |
| NO (1) | NO340343B1 (ja) |
| RU (1) | RU2419768C2 (ja) |
| WO (1) | WO2008031480A1 (ja) |
| ZA (1) | ZA200901501B (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009019318B4 (de) * | 2009-04-30 | 2026-03-12 | Aumovio Germany Gmbh | Verfahren zum präzisen Messbetrieb eines mikromechanischen Drehratensensors |
| EP2547985B1 (de) * | 2010-03-17 | 2016-03-16 | Continental Teves AG & Co. oHG | Verfahren zur entkoppelten regelung der quadratur und der resonanzfrequenz eines mikromechanischen drehratensensors mittels sigma-delta-modulation |
| DE102011005744A1 (de) * | 2010-03-17 | 2011-09-22 | Continental Teves Ag & Co. Ohg | Verfahren zur entkoppelten Regelung der Quadratur und der Resonanzfrequenz eines mikromechanischen Gyroskops |
| US9010184B2 (en) * | 2011-05-23 | 2015-04-21 | Senodia Technologies (Shanghai) Co., Ltd. | MEMS devices sensing both rotation and acceleration |
| DE102014003640B4 (de) * | 2014-03-14 | 2025-05-28 | Northrop Grumman Litef Gmbh | Verfahren zum Optimieren der Einschaltzeit eines Corioliskreisels sowie dafür geeigneter Corioliskreisel |
| DE102014004858A1 (de) | 2014-04-03 | 2014-11-06 | Daimler Ag | Befestigungsanordnung wenigstens eines Lagerelements an einem Kurbelgehäuse einer Hubkolben-Verbrennungskraftmaschine |
| EP3154986A1 (en) * | 2014-06-16 | 2017-04-19 | Allinky Biopharma | P38 and jnk mapk inhibitors for the treatment and prophylaxis of degenerative diseases of the nervous system |
| KR102286261B1 (ko) * | 2020-09-14 | 2021-08-04 | 이재철 | 락인 제로 링 레이저 자이로스코프 시스템 및 그 구동 방법 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5497660A (en) * | 1994-05-31 | 1996-03-12 | Litton Systems, Inc. | Digital force balanced instrument |
| US5992233A (en) | 1996-05-31 | 1999-11-30 | The Regents Of The University Of California | Micromachined Z-axis vibratory rate gyroscope |
| US6250156B1 (en) | 1996-05-31 | 2001-06-26 | The Regents Of The University Of California | Dual-mass micromachined vibratory rate gyroscope |
| JP3407689B2 (ja) * | 1999-04-22 | 2003-05-19 | 株式会社村田製作所 | 振動ジャイロ |
| CN2397473Y (zh) * | 1999-09-29 | 2000-09-20 | 中国科学院上海冶金研究所 | 栅型结构电容式微机械谐振陀螺 |
| EP1313215B1 (en) * | 1999-11-02 | 2012-05-02 | ETA SA Manufacture Horlogère Suisse | Temperature compensation mechanism for a micromechanical ring resonator |
| US20030033850A1 (en) * | 2001-08-09 | 2003-02-20 | Challoner A. Dorian | Cloverleaf microgyroscope with electrostatic alignment and tuning |
| RU2209394C2 (ru) * | 2001-08-14 | 2003-07-27 | Открытое акционерное общество Арзамасское научно-производственное предприятие "Темп-Авиа" | Микромеханический гироскоп |
| US20040027033A1 (en) * | 2002-08-08 | 2004-02-12 | Schiller Peter J. | Solid-state acceleration sensor device and method |
| DE10248733B4 (de) * | 2002-10-18 | 2004-10-28 | Litef Gmbh | Verfahren zur elektronischen Abstimmung der Ausleseschwingungsfrequenz eines Corioliskreisels |
| US6934660B2 (en) * | 2003-02-20 | 2005-08-23 | The Regents Of The University Of California | Multi stage control architecture for error suppression in micromachined gyroscopes |
| DE10320675B4 (de) * | 2003-05-08 | 2006-03-16 | Litef Gmbh | Betriebsverfahren für einen Corioliskreisel und dafür geeignete Auswerte-/Regelelektronik |
| DE10360963B4 (de) * | 2003-12-23 | 2007-05-16 | Litef Gmbh | Verfahren zur Messung von Drehraten/Beschleunigungen unter Verwendung eines Drehraten-Corioliskreisels sowie dafür geeigneter Corioliskreisel |
| RU2274833C1 (ru) * | 2004-10-01 | 2006-04-20 | Федеральное государственное унитарное предприятие Центральный научно-исследовательский институт "Электроприбор" | Устройство преобразования сигналов микромеханического гироскопа вибрационного типа |
| DE102004056699A1 (de) | 2004-11-24 | 2006-06-01 | Litef Gmbh | Verfahren zur Steuerung/Regelung einer physikalischen Größe eines dynamischen Systems, insbesondere eines mikromechanischen Sensors |
-
2006
- 2006-09-15 DE DE102006043412A patent/DE102006043412A1/de not_active Ceased
-
2007
- 2007-08-08 KR KR1020097004067A patent/KR101093883B1/ko not_active Expired - Fee Related
- 2007-08-08 US US12/310,572 patent/US8424382B2/en not_active Expired - Fee Related
- 2007-08-08 WO PCT/EP2007/007028 patent/WO2008031480A1/de not_active Ceased
- 2007-08-08 JP JP2009527708A patent/JP5259598B2/ja not_active Expired - Fee Related
- 2007-08-08 EP EP07786628A patent/EP2062009B1/de active Active
- 2007-08-08 CA CA2661525A patent/CA2661525C/en not_active Expired - Fee Related
- 2007-08-08 RU RU2009102521/28A patent/RU2419768C2/ru not_active IP Right Cessation
- 2007-08-08 CN CN2007800343724A patent/CN101517359B/zh active Active
- 2007-08-08 AT AT07786628T patent/ATE541186T1/de active
- 2007-08-08 AU AU2007296984A patent/AU2007296984B2/en not_active Ceased
-
2009
- 2009-02-23 NO NO20090842A patent/NO340343B1/no unknown
- 2009-03-03 ZA ZA2009/01501A patent/ZA200901501B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN101517359B (zh) | 2011-07-13 |
| KR20090035616A (ko) | 2009-04-09 |
| ZA200901501B (en) | 2010-02-24 |
| WO2008031480A9 (de) | 2009-03-05 |
| US20100186503A1 (en) | 2010-07-29 |
| US8424382B2 (en) | 2013-04-23 |
| WO2008031480A1 (de) | 2008-03-20 |
| RU2419768C2 (ru) | 2011-05-27 |
| CN101517359A (zh) | 2009-08-26 |
| RU2009102521A (ru) | 2010-10-20 |
| NO340343B1 (no) | 2017-04-03 |
| NO20090842L (no) | 2009-06-10 |
| CA2661525A1 (en) | 2008-03-20 |
| CA2661525C (en) | 2013-03-26 |
| AU2007296984B2 (en) | 2010-09-30 |
| DE102006043412A1 (de) | 2008-03-27 |
| JP2010502998A (ja) | 2010-01-28 |
| EP2062009B1 (de) | 2012-01-11 |
| KR101093883B1 (ko) | 2011-12-13 |
| EP2062009A1 (de) | 2009-05-27 |
| AU2007296984A1 (en) | 2008-03-20 |
| ATE541186T1 (de) | 2012-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5259598B2 (ja) | 微小電気機械センサ及び微小電気機械センサの操作方法 | |
| US8056413B2 (en) | Sensor and sensing method utilizing symmetrical differential readout | |
| JP3785261B2 (ja) | マイクロアクチュエータの相補型静電駆動装置 | |
| CN106629571B (zh) | 一种基于模态局部化效应的弱耦合mems谐振式加速度计 | |
| KR101178692B1 (ko) | 코리올리 자이로스코프 | |
| KR101823325B1 (ko) | 개선된 자이로스코프 구조체 및 자이로스코프 | |
| JP2009530603A (ja) | 二軸振動ジャイロスコープ | |
| EP2647954A2 (en) | Self test of mems gyroscope with asics integrated capacitors | |
| KR20100023045A (ko) | 회전 속도 센서 | |
| CN101701967A (zh) | 六自由度微机械多传感器 | |
| JP2006053152A (ja) | 振動数検出を用いたマイクロジャイロメーター | |
| JP2011039074A (ja) | 機械式センサとこれを含む機械式レートジャイロスコープとその操作方法 | |
| JP2003531359A (ja) | 振動型マイクロジャイロスコープ | |
| CN105074384A (zh) | 简化校准的陀螺仪以及陀螺仪的简化校准方法 | |
| WO2010024729A2 (en) | Micromechanical gyroscope and method for tuning thereof based on using of amplitude modulated quadrature | |
| Antonello et al. | Open loop compensation of the quadrature error in MEMS vibrating gyroscopes | |
| JP2008134243A (ja) | デュアルモードmemsセンサ | |
| Sahin et al. | A wide-bandwidth and high-sensitivity robust microgyroscope | |
| JP2000074673A (ja) | 複合運動センサ | |
| Droogendijk et al. | Towards a biomimetic gyroscope inspired by the fly's haltere using microelectromechanical systems technology | |
| Zhang et al. | The structure principle of silicon micromachined gyroscope driven by the rotating carrier | |
| JP2001194155A (ja) | 運動センサ | |
| Che et al. | A novel electrostatic-driven tuning fork micromachined gyroscope with a bar structure operating at atmospheric pressure | |
| Li et al. | Structure design and fabrication of a novel dual-mass resonant output micromechanical gyroscope | |
| RU2073209C1 (ru) | Вибрационный гироскоп |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120514 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |