JP5222028B2 - Image processing apparatus, image forming apparatus, and image processing method - Google Patents
Image processing apparatus, image forming apparatus, and image processing method Download PDFInfo
- Publication number
- JP5222028B2 JP5222028B2 JP2008147069A JP2008147069A JP5222028B2 JP 5222028 B2 JP5222028 B2 JP 5222028B2 JP 2008147069 A JP2008147069 A JP 2008147069A JP 2008147069 A JP2008147069 A JP 2008147069A JP 5222028 B2 JP5222028 B2 JP 5222028B2
- Authority
- JP
- Japan
- Prior art keywords
- pulse width
- image data
- image
- correction
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012545 processing Methods 0.000 title claims description 39
- 238000003672 processing method Methods 0.000 title claims 3
- 238000012937 correction Methods 0.000 claims description 89
- 238000000034 method Methods 0.000 claims description 46
- 230000007613 environmental effect Effects 0.000 claims description 12
- 108091008695 photoreceptors Proteins 0.000 claims 2
- 238000009499 grossing Methods 0.000 description 30
- 230000003287 optical effect Effects 0.000 description 25
- 238000012546 transfer Methods 0.000 description 14
- 230000015572 biosynthetic process Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 7
- 238000003860 storage Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 238000003702 image correction Methods 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000003705 background correction Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000007773 growth pattern Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images






















Landscapes
- Fax Reproducing Arrangements (AREA)
- Facsimile Image Signal Circuits (AREA)
- Laser Beam Printer (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
- Image Processing (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
本発明は、画像データを補正するものに関する。 The present invention relates to a method for correcting image data .
従来から、感光ドラムに対してレーザ光を照射して画像形成を行なう画像形成装置が利用されている。こうしたレーザ光学系を用いた場合、たとえば機械精度や、組み立て設置時の組み付け誤差などの組み立て時の原因により、感光ドラム上に露光した走査線の書き出し位置がずれたり、倍率が歪んたり、潜像が傾いたり、湾曲したり、歪曲したりする場合があった。このうち、書き出し位置や倍率の補正については、誤差を検出して電気的に補正する方式が従来から採られている。しかし、走査線の傾きや歪みに対してはこういった電気的な補正が困難であるため、従来はこうした傾きや歪みが生じないように高品質な光学部品による補正が行われている。このため高価な構成の装置が必要となり、さらには組み立て時にも精密な微調整が必要であるため、工数の増大につながり、結果として生産コストが高価になっていた。 2. Description of the Related Art Conventionally, image forming apparatuses that perform image formation by irradiating a photosensitive drum with laser light have been used. When such a laser optical system is used, the writing position of the scanning line exposed on the photosensitive drum may be shifted, the magnification may be distorted, or the latent image may be caused by assembly accuracy such as mechanical accuracy or assembly error during assembly. May be tilted, curved, or distorted. Of these methods, correction of the writing position and magnification has conventionally been performed by detecting an error and electrically correcting it. However, since such electrical correction is difficult for the inclination and distortion of the scanning line, conventionally, correction using high-quality optical components is performed so as to prevent such inclination and distortion. For this reason, an apparatus having an expensive configuration is required, and further fine fine adjustment is required at the time of assembly, leading to an increase in man-hours, resulting in an increase in production cost.
上記課題に対して、特許文献1では、主走査方向の少なくとも3カ所以上の複数の位置でレジストレーションを検出し、検出したレジストレーションから算出した主走査方向の傾き、湾曲などの歪みを補正するように画像データを変更する方法が提案されている。ここで副走査方向の1画素以下の補正に関しても同様にレジストレーションの検出結果より書き出し位置を検出し、検出された副走査方向の書き出し位置を補正するように画像データを変更する。このように変更された画像データを画像形成することにより高価な光学部品を使用したり精密な調整行程を経たりすることなく走査線の傾き、歪みなどの位置補正を行うことができ、安価で高画質な画像形成装置を提供できる。
With respect to the above problem,
しかしながら特許文献1に示した構成の場合、主走査方向に少なくとも3カ所以上の複数のレジストレーション検出手段を設ける必要があり、装置自体としては大幅なコストアップとなってしまうという課題があった。
However, in the case of the configuration shown in
さらに特許文献1では、レジストレーションパターンの検出結果から走査線の傾き・歪みを導きだし、画像データに対して補正を行っているが、走査線の傾きと歪みの形状によっては主走査方向の補正位置に粗密が発生するため補正が最適に行えない場合があった。
Further, in
本発明は上記従来技術の課題を解決するためになされたもので、画像データの補正により、走査線の湾曲を低減し高品質な画像形成を実現できるようにすることを目的とする。 The present invention has been made to solve the above-described problems of the prior art, and an object of the present invention is to realize high-quality image formation by reducing the curvature of a scanning line by correcting image data .
上記目的を達成するため、請求項1に係る画像処理装置は、
潜像を形成するための感光体と、前記感光体上に潜像を形成するための光ビームを出射する光源と、前記光ビームが前記感光体上を主走査方向に移動するように前記光ビームを偏向する偏向手段とを有する画像形成装置のための画像データを生成する画像処理装置であって、
前記感光体上に前記光ビームによって前記主走査方向に描かれる走査線の副走査方向への湾曲に応じて、注目画素の画像データの走査ラインを変更する変更手段と、
前記走査ラインが変更された画像データの画素と前記副走査方向において隣接し、白を示す画素の画像データを、1画素未満の大きさのドットを示す画像データに補正する補正手段と、
パルス幅テーブルを用いて、前記補正手段によって補正された画像データ以外の画像データおよび前記補正手段によって補正された画像データを前記光源を制御するためのパルス幅データに変換するパルス幅変調手段と
を有し、
前記パルス幅テーブルは、画像データとパルス幅データとを対応付けたテーブルであり、
前記パルス幅変調手段は、前記補正手段によって補正された画像データ以外の画像データと前記補正手段によって補正された画像データとで異なるパルス幅テーブルを使用することを特徴とする。
In order to achieve the above object, an image processing apparatus according to
A photosensitive member for forming a latent image; a light source for emitting a light beam for forming a latent image on the photosensitive member; and the light beam so that the light beam moves on the photosensitive member in a main scanning direction. An image processing apparatus for generating image data for an image forming apparatus having deflection means for deflecting a beam,
Changing means for changing a scan line of image data of a target pixel in accordance with a curve in a sub-scan direction of a scan line drawn in the main scan direction by the light beam on the photoconductor;
Correction means for correcting image data of pixels that are adjacent to the pixels of the image data in which the scan line has been changed in the sub-scanning direction and that indicate pixels that are white to image data that indicates dots having a size of less than one pixel;
Using a pulse width table, and a pulse width modulation means for converting the image data corrected by the image data other than the corrected image data by correcting means and the correction means to the pulse width data for controlling the light source Have
The pulse width table is a table in which image data and pulse width data are associated with each other,
Said pulse width modulating means is characterized by using said different pulse width table by the corrected image data and image data other than the image data corrected by the correction means by said correcting means.
本発明によれば、画像データの補正により、走査線の湾曲を低減し高品質な画像形成を実現することができる。 According to the present invention, it is possible to reduce the curve of the scanning line and realize high-quality image formation by correcting the image data .
以下に、図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。ただし、この実施の形態に記載されている構成要素はあくまで例示であり、この発明の範囲をそれらのみに限定する趣旨のものではない。 Hereinafter, exemplary embodiments of the present invention will be described in detail with reference to the drawings. However, the constituent elements described in this embodiment are merely examples, and are not intended to limit the scope of the present invention only to them.
(第1実施形態)
<装置構成>
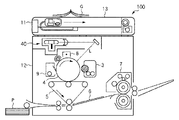
本発明を適用可能な画像形成装置の例として、図1及び図2に示す2種類の複写機100、200について説明する。図1、2は、第1実施形態としての複写機100、200の内部構成を示す図である。なお、本発明に係る画像形成装置は、このような複写機に限定されるものはなく、プリンタやファックス、或いはそれらの機能を併せ持つ複合機などにも本発明を適用可能である。
(First embodiment)
<Device configuration>
As an example of an image forming apparatus to which the present invention is applicable, two types of
図1に示す複写機100において、リーダ部11では、原稿台ガラス13上に置かれた原稿Gが光源によって照射され、その反射光は光学系を介してCCDセンサに結像する。CCDセンサは3列に配置されたレッド、グリーン、ブルーのCCDラインセンサ群により、ラインセンサ毎にレッド、グリーン、ブルーの成分信号を生成する。これら読み取り光学系ユニットは矢印の方向に走査することにより原稿をライン毎の電気信号データ列に変換する。CCDセンサにより得られた画像信号は、不図示のリーダ画像処理部にて画像処理された後、プリンタ部12に送られる。
In the
プリンタ部12では、表面に画像に応じた静電潜像を担持するための像担持体としての感光ドラム4が所定の角速度で回転する。そして、その感光ドラム4の表面を帯電手段としての帯電器8によって一様に帯電する。次にリーダ部11からの画像データに応じてON/OFF制御された露光手段としての露光装置40によってレーザビームLを露光走査させることで感光ドラム4上に画像データに従った静電潜像が形成される。現像手段としての現像器3は、感光ドラム4の表面に形成された静電潜像に対し、現像剤としてのトナーを飛翔させることにより、現像剤像を形成する。感光ドラム4に所定の押圧力を持って圧接されながら回転駆動する転写手段としての中間転写体5上に、この可視化されたトナー像が、転写される。その後、給紙ユニットから給紙された記録材6にトナー像を転写し、転写後の記録材6上のトナー像を、定着器7において定着処理した後、記録材6を機外に排出する。
In the
図2に示す複写機200はタンデム式の画像形成装置であり、図1に示す複写機100と異なり、各色に対応するプロセスカートリッジ20Y、20M、20C、20Kを並べた構成となっている。複数のプロセスカートリッジを有している点以外は図1に示す複写機100と同じ構成であるため、同じ構成要素については同じ符号を付してその説明を省略する。
A
プロセスカートリッジ20Y〜20Kに含まれる帯電器8Y、8M、8C、8Kはローラ帯電器であり、バイアスを印加することでそれぞれの感光ドラム4Y、4M、4C、4Kの表面を一様に負極性に帯電させる。画像データは、露光手段としての露光装置40に含まれるレーザドライバ及びレーザ光源を介してレーザ光に変換され、そのレーザ光はポリゴンミラーにより反射され、一様に帯電された各感光ドラム4Y〜4K上に照射される。レーザ光の走査により潜像が形成された感光ドラム4Y〜4Kは、図中に示す矢印の方向に回転する。
The
各プロセスカートリッジ20Y〜20Kには、イエロートナー現像器3Y、マゼンタトナー現像器3M、シアントナー現像器3C、ブラックトナー現像器3Kが設けられている。
Each of the
ここで、プロセスカートリッジ20Yを例に取り、画像形成過程を具体的に説明する。プロセスカートリッジ20Yの感光ドラム4Yの表面が帯電器8Yによってそれぞれ一様に帯電される(たとえば本実施形態では−500V)。次に、第1色目の画像データに応じてON/OFF制御された露光装置40Yによる露光走査がなされ、第1色目の静電潜像(本実施形態にあっては約−150 V)が感光ドラム4Y上に形成される。この第1色目の静電潜像は第1色目のイエロートナー(−極性)を内包したイエロートナー現像器3Yによって現像、可視像化される。この可視像化された第1のトナー像は、感光ドラム4Yに圧接され、感光ドラム4Yの周速度と略等速の速度をもって回転駆動される中間転写体5とのニップ部において、中間転写体5上に一次転写される。一次転写の際に中間転写体5に転写されずに感光ドラム4Y上に残ったトナーは、感光ドラム4Yに圧接されたクリーニングブレード9Yにより掻き取られ、廃トナー容器(不図示)に回収される。
Here, taking the
他のプロセスカートリッジ20M、20C、20Kにおいても上記と同様の工程が行われ、プロセスカートリッジ毎に色の異なるトナーによるトナー像を中間転写体5上に順次転写、積層した後、給紙ユニットから給紙された記録材6に一括で二次転写する。転写後の記録材6は、定着器7による定着処理を経て機外に排出され、フルカラープリントとなる。
The same process is performed on the
図3は、リーダ部11に含まれる画像処理部の内部構成について説明する図である。CCD301により読み込まれた原稿画像の輝度信号は、A/D変換部302に入力されデジタル信号に変換される。このデジタル輝度信号はシェーディング部303に送られ、CCD個々の素子の感度に関するバラツキによる光量ムラがシェーディング補正される。シェーディング補正することにより、CCDの測定再現性が向上する。シェーディング部303で補正された輝度信号は、更にLOG変換部304によりLOG変換される。続いて、LOG変換された信号は、γLUT305に送られ、プリンタ装置が理想とする濃度特性と、γ特性にしたがって処理された出力画像濃度特性とが一致するように作成されたγ−LUT305によって変換される。こうして変換された画像信号は、プリンタ部12の画像メモリ310に送信され、格納される。
FIG. 3 is a diagram illustrating the internal configuration of the image processing unit included in the
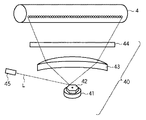
図4、図5を用いて、本実施形態に係る露光装置40について説明する。露光装置40は、レーザ駆動部45、回転多面鏡モータ41、回転多面鏡42、光学系f−θレンズ43、及び反射ミラー44を含む。レーザ駆動部45から発射されたレーザLは、回転多面鏡モータ41上に設置された回転多面鏡42の反射面で反射され、露光面で線速度一定になるような光学系f−θレンズ43を通り、更に反射ミラー44で反射され、感光ドラム4に到達する。この時、反射されたレーザLの軌跡は、図4のような理想的な直線を描くことが望ましい。
The
しかし、特になんの調整も行われないまま搭載された露光装置40の各構成部分は固有の傾きや歪みなどを有しており、そのまま露光動作を行った場合、走査線は、図4のような理想的な直線を描かない。すなわち、露光された走査線は図5のように固有の傾きや歪みの影響を持って感光ドラム4上を走査することになる。従来は露光走査線が感光ドラム4上でこうした傾きや歪みを生じないで走査させるために、露光装置40の組み立て時に高価な光学部品を用いたり、あるいは装置自体に精密な微調整を行ってきた。本実施の形態ではこうした高価な部品を用いたり精密な微調整を行うことなく、レーザ光学系が持つ固有の走査線の傾きや歪みをキャンセルし、安価でかつ良好な画質を得ることを実現するための画像処理部46を有する。画像処理部46は、露光装置の歪みや傾きを表わすプロファイルデータを記憶するプロファイル記憶部47と、記憶されたプロファイルデータに基づいて、入力した画像データを変形する画像形成手段としての画像補正部48とを含む。また更に、変形後の画像データに含まれる段差部分を平滑化すべくレーザ駆動部45を制御するための平滑化処理手段としての平滑化処理部49を含む。
However, each component of the
<補正制御>
複写機等の画像形成装置の光学系の形状又は位置の設計誤差による画像の変形を補填するためのデータ補正処理について、以下に説明する。このデータ補正処理は、以下の5つに分けて考えることができる。
(1)露光装置を含む光学系のプロファイルの計測及び保存
(2)プロファイルデータの画像形成装置への転送
(3)プロファイルデータからの第1補正データの生成
(4)画像形成時における第1補正データを用いた画像データの加工
(5)平滑化処理
<Correction control>
Data correction processing for compensating for image deformation due to design errors in the shape or position of the optical system of an image forming apparatus such as a copying machine will be described below. This data correction process can be divided into the following five.
(1) Measurement and storage of profile of optical system including exposure apparatus (2) Transfer of profile data to image forming apparatus (3) Generation of first correction data from profile data (4) First correction at the time of image formation Processing of image data using data (5) Smoothing processing
そこで、以下に、上記5つのそれぞれの処理について分けて説明する。
(1)走査線プロファイルの計測
光学系に起因する画像の変形を補填するためのデータ補正処理の最初の段階として、レーザ光学系の製造時において、レーザ光学系固有の傾きや歪みといったプロファイルを計測する。
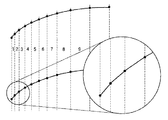
この時点で、図7に示すように走査線を主走査方向にn分割(nは少なくとも3以上、ここでは例としてn=10)した際の各分割ポイントでの副走査方向位置をプロファイルポイントとする。
Therefore, the above five processes will be described separately.
(1) Scanning line profile measurement As the first stage of data correction processing to compensate for image deformation caused by the optical system, a profile such as tilt and distortion inherent to the laser optical system is measured during the manufacture of the laser optical system. To do.
At this point, as shown in FIG. 7, the position in the sub-scanning direction at each division point when the scanning line is divided into n in the main scanning direction (n is at least 3 or more, here n = 10 as an example) is defined as a profile point. To do.
計測されたプロファイルデータはレーザ光学系ユニットにEPROMなどの記憶媒体を保持させてそこに記憶させる。或いは、簡易な構成としてはバーコードなどのようにデータを暗号化させてレーザ光学系のユニット本体に添付する構成を取ることにより記憶・保持する。 The measured profile data is stored in the laser optical system unit by holding a storage medium such as EPROM. Alternatively, as a simple configuration, data is encrypted and stored in a unit such as a barcode and attached to the unit body of the laser optical system.
(2)プロファイルデータの画像形成装置への転送
記憶されたプロファイルデータは組み立て時にレーザ光学系ユニットのEPROMから画像形成装置本体へと読み出される。もし出荷後にサービスマンによってユーザ先でレーザ光学系ユニットの交換が行われた場合でもユニット交換後にユニットに保持されたEPROMから交換されたレーザ光学系ユニットに対応したプロファイルデータをプロファイル記憶部47に保存する。
(2) Transfer of Profile Data to Image Forming Apparatus The stored profile data is read from the EPROM of the laser optical system unit to the image forming apparatus main body at the time of assembly. Even if the customer replaces the laser optical system unit after shipment, the profile data corresponding to the replaced laser optical system unit is stored in the
又は、組み立て時に作業者がバーコードリーダのような暗号読み取り装置を用いて暗号化されたバーコードデータを読み取って画像形成装置本体へ反映させる構成でもよい。この場合、交換するユニットに添付されたバーコードをサービスマンがバーコードリーダで読み取る、若しくは数値を代入することにより、やはり同様にレーザ光学系ユニットに対応したプロファイルデータをプロファイル記憶部47に保存する。
Alternatively, a configuration may be adopted in which an operator reads barcode data encrypted by using an encryption reading device such as a barcode reader and reflects it on the image forming apparatus main body at the time of assembly. In this case, the service person reads the barcode attached to the unit to be replaced with a barcode reader or substitutes a numerical value, and similarly stores the profile data corresponding to the laser optical system unit in the
(3)第1補正データの算出
図6を用いて、画像形成時にレーザ光学系の傾きや歪みを補正する処理について説明する。図6は、この補正処理の流れを説明するためのフローチャートであり、その各処理は、画像形成装置に設けられた不図示のプロセッサが、所定のプログラムを実行することにより実現される。
(3) Calculation of First Correction Data A process for correcting the tilt and distortion of the laser optical system during image formation will be described with reference to FIG. FIG. 6 is a flowchart for explaining the flow of the correction process, and each process is realized by a processor (not shown) provided in the image forming apparatus executing a predetermined program.
ステップS64でn個の走査線のプロファイルデータに基づき、各点と理想座標からのずれ量から第1補正データを算出する。 In step S64, based on the profile data of n scanning lines, first correction data is calculated from the amount of deviation from each point and the ideal coordinates.
ここで、図8A〜Cを用いて第1補正データの算出フローについて説明する。図8AのステップS81において、まず図8Bに示すようにn個のプロファイルポイントデータでn分割された走査線を主走査全域に渡って近似する。ここで本実施の形態において、隣り合う二点間に対しての直線近似を用いた。次にステップS82においてステップS81で得られた主走査全域の近似点のうち主走査書き出し位置を基準点として設定する。 Here, the calculation flow of the first correction data will be described with reference to FIGS. In step S81 of FIG. 8A, first, as shown in FIG. 8B, the scanning lines divided by n pieces of n profile point data are approximated over the entire main scanning area. Here, in the present embodiment, linear approximation between two adjacent points is used. Next, in step S82, the main scanning write position is set as a reference point among the approximate points in the entire main scanning area obtained in step S81.
ステップS83では基準点から主走査方向に近似点をチェックし、基準点との副走査方向の差分ΔVが1画素を超えた場合にはステップS84でその点(A点)の主走査位置をオフセットポイントとする。次にステップS86ではA点を新たな基準点として再設定する。 In step S83, an approximate point is checked from the reference point in the main scanning direction. If the difference ΔV in the sub-scanning direction from the reference point exceeds one pixel, the main scanning position of that point (point A) is offset in step S84. Points. In step S86, point A is reset as a new reference point.
上記ステップS83〜ステップS86までを主走査全域に渡って行うことにより、走査線の傾きや歪みを補正するための副走査方向1画素単位のオフセットを行う位置(オフセットポイント)の座標(X個)が得られる(図8C)。こうして得られたX個のオフセットポイントの座標情報と、それぞれのオフセットポイントにおける基準ラインからのオフセット量の情報とが第1補正データとして、プロファイル記憶部47に格納される。
By performing the above steps S83 to S86 over the entire main scanning region, the coordinates (X points) of the position (offset point) for performing offset in units of one pixel in the sub-scanning direction for correcting the inclination and distortion of the scanning line. Is obtained (FIG. 8C). The coordinate information of the X offset points thus obtained and the information on the offset amount from the reference line at each offset point are stored in the
(4)画像形成時における第1補正データを用いた画像データの加工
ステップS65で画像補正部48が第1補正データにしたがって、入力された画像データの加工を行う(第1の補正)。
(4) the
ここで第1補正データを用いた画像データの加工処理について、図9A、Bを用い説明する。図9AはラインバッファでありRAMにより構成される。本実施の形態では主走査方向幅297mm、600dpiの場合、約7000ドット分の補正データがRAMに書き込まれることになる。本実施の形態において補正データは例えば8ビットで構成され、符号付きの2進数で第1の補正のためのオフセット用ラインバッファ91を構成する。
Here, the processing of image data using the first correction data will be described with reference to FIGS. 9A and 9B. FIG. 9A is a line buffer and is constituted by a RAM. In this embodiment, when the main scanning direction width is 297 mm and 600 dpi, correction data for about 7000 dots is written in the RAM. In the present embodiment, the correction data is composed of, for example, 8 bits, and forms an offset
図9Bは第1の補正のためのオフセット用ラインバッファ91を示す図である。
FIG. 9B is a diagram showing an offset
図9Bにおいて、92は入力画像データであり、91は、ここでの画像データの加工のためのオフセット用ラインバッファである。まずステップS84で算出された第1補正データの座標情報とオフセット量情報は第1の補正のためのオフセット用ラインバッファ91に読み込まれる。すなわち、オフセットポイントの座標Xnに対してオフセット量Ynが設定され、ライン数Ynだけ、元の位置から副走査方向にずれた位置の画像データによって置き換える(メモリ上のそのずれた位置から読出す)補正を施す。この結果、補正ビットマップデータ93が作成される。図9Bの例では、オフセットポイントX1はオフセット量Y0=0に規定されているのでオフセットしない。しかし、オフセットポイントX2はオフセット量Y2=−1に規定されているので、メモリ上で1画素分、副走査方向手前のアドレスから画素を読出す。この処理を各オフセットポイントXnについて行なうことにより、図9Bにおいて水平方向の直線を示すビットマップデータ92は、ビットマップデータ93に示すように、右上がりの直線に並び変えられる。
In FIG. 9B, 92 is input image data, and 91 is an offset line buffer for processing the image data here. First, the coordinate information and offset amount information of the first correction data calculated in step S84 are read into the offset
(5)平滑化処理
図6のステップS66において、ステップS65の第1の補正で並べ替え処理された補正ビットマップデータに対して、平滑化処理(第2の補正)を行う。この処理の流れを図10A、B及び図15A〜Dを用いて説明する。
(5) Smoothing Process In step S66 of FIG. 6, a smoothing process (second correction) is performed on the corrected bitmap data rearranged by the first correction in step S65. The flow of this processing will be described with reference to FIG. 10A, B and Figure 15 to D.
図10Aはラインバッファを示す図でありRAMにより構成される。本実施の形態では主走査方向幅297mm、600dpiの場合、約7000ドット分の補正データがRAMに書き込まれることになる。本実施の形態においては平滑化データは例えば8ビットで構成され、平滑化用ラインバッファ101を構成する。
FIG. 10A is a diagram showing a line buffer, which is constituted by a RAM. In this embodiment, when the main scanning direction width is 297 mm and 600 dpi, correction data for about 7000 dots is written in the RAM. In this embodiment, the smoothed data is composed of, for example, 8 bits, and constitutes a smoothing
図10Bに平滑化処理部49が実行する平滑化処理のフローチャートを示す。図10BのステップS101で、まずステップS84で算出された第1補正データのオフセットポイントXnにおける主走査座標xのビットマップデータImg(x)と主走査方向1つ前の画素のビットマップデータImg(x−1)を比較する。もしImg(x)<Img(x−1)であった場合(例えば図15Aの下側の段差)は、ステップS102で次のオフセットポイントXn+1とオフセットポイントXnとの領域Xn+1〜Xnを平滑化領域S(1)とする。ステップS103で、Img(x)>Img(x−1)であった場合(例えば図15Aの上側の段差)は、ステップS104で前のオフセットポイントXn-1とオフセットポイントXnとの領域Xn-1〜Xnを算出して平滑化領域S(−1)とする。
FIG. 10B shows a flowchart of the smoothing process executed by the smoothing
次にステップS105において、オフセットポイントに隣接する白画像領域(Img(x)=0)で、かつステップS102、104で得られた平滑化領域Sに対して、1画素未満のドットを補充して平滑化処理を行なう(例えば図15B)。 Next, in step S105, the white image area (Img (x) = 0) adjacent to the offset point and the smoothed area S obtained in steps S102 and 104 are supplemented with dots less than one pixel. Smoothing processing is performed (for example, FIG. 15B).
ここで、本実施の形態では1画素あたり16分割のPWMを使って画素を形成する。つまり、パルス幅に応じた16レベルの露光量を使って平滑化処理を行う。 Here, in this embodiment, pixels are formed by using 16-division PWM per pixel. That is, smoothing processing is performed using 16 levels of exposure corresponding to the pulse width.
通常、画像形成時には、入力画像信号値に対して、図11に示したようなあらかじめ設定されたパルス幅テーブルに従ってパルス幅を変調させる構成となっている。図11に示すようなパルス幅テーブルは、実際には入力画像信号とそれに従って感光ドラム上に露光した際に形成される感光ドラム上の静電潜像の形状に依存する。 Normally, at the time of image formation, the input image signal value is configured to modulate the pulse width according to a preset pulse width table as shown in FIG. The pulse width table as shown in FIG. 11 actually depends on the input image signal and the shape of the electrostatic latent image on the photosensitive drum formed when the photosensitive drum is exposed accordingly.
ここで図12を用いて、入力画像信号とパルス幅変調で可変した露光量によって感光ドラム上に形成される静電潜像の関係を模式的に表す。今、図11に示すようなパルス幅変調テーブルを用いたときに、図12(a)に示すような3種類の画像信号が入力された場合、各画素ごとに(b)に示すように画像信号に対応したパルス幅で露光される。ここで図12(b)に示しているのはパルスの点灯時間を模式的に1画素内に長さで示したものであり、1画素内での点灯の配置を示しているものではない。その場合、感光ドラム上に形成される静電潜像は図12(c)のようになり、結果、画像形成装置としては図12(d)に示すような画像となって出力される。 Here, using FIG. 12, the relationship between the input image signal and the electrostatic latent image formed on the photosensitive drum by the exposure amount varied by pulse width modulation is schematically represented. When a pulse width modulation table as shown in FIG. 11 is used and three types of image signals as shown in FIG. 12 (a) are input, an image is shown for each pixel as shown in (b). Exposure is performed with a pulse width corresponding to the signal. Here, FIG. 12B schematically shows the lighting time of the pulse by the length in one pixel, and does not show the arrangement of lighting in one pixel. In this case, the electrostatic latent image formed on the photosensitive drum is as shown in FIG. 12C, and as a result, the image forming apparatus outputs an image as shown in FIG. 12D.
つまり、自画素に隣接する画素にデータがある場合と隣接画素にデータがなく自画素が孤立ドットであった場合では同じパルス幅で露光しても出力される画像は異なってしまう。本来ならば入力画像信号の配置に従って毎画素ごとにパルス幅を変化させることにより隣接画素と自画素に応じて適切な露光量で露光することが望ましい。しかし構成が複雑になりコストも高額であるため通常は自画素の近傍に隣接画素があった場合と孤立画素だった場合のどちらにも適応可能なパルス幅テーブルを採用する。もしくは疑似中間調処理の画素配置・成長のパターンを隣接画素、もしくは孤立画素のいずれかを重視するような構成を取ることで出力画像に対して不具合のないように対応している。 In other words, when there is data in a pixel adjacent to the own pixel and when there is no data in the adjacent pixel and the own pixel is an isolated dot, the output image is different even if exposure is performed with the same pulse width. Originally, it is desirable to perform exposure with an appropriate exposure amount according to the adjacent pixel and the own pixel by changing the pulse width for each pixel according to the arrangement of the input image signal. However, since the configuration is complicated and the cost is high, a pulse width table that can be applied to both the case where there is an adjacent pixel and the case where it is an isolated pixel is usually adopted. Alternatively, the pixel arrangement / growth pattern of the pseudo halftone process is configured so as to place importance on either the adjacent pixel or the isolated pixel so that there is no problem with the output image.
ここでステップS102、104で得られた長さ|S|の区間に対してパルス幅変調を利用して平滑化処理を施す構成となっているが、平滑化処理のために形成される1画素未満のドットは常に隣接する領域に別の潜像が存在することが保証されている。そこで本実施の形態では、平滑化処理で形成する1画素未満のドットを形成するために通常の画像形成用のパルス幅テーブルとは異なる平滑化処理用のパルス幅テーブルを持つ。図13に通常の画像形成用のパルス幅テーブルと本実施の形態の第2の補正手段に使用するパルス幅テーブルを示す。 Here, the section of the length | S | obtained in steps S102 and 104 is subjected to smoothing processing using pulse width modulation, but one pixel formed for smoothing processing. Less than dots are always guaranteed to have another latent image in the adjacent area. Therefore, in this embodiment, in order to form dots of less than one pixel formed by the smoothing process, a pulse width table for smoothing process different from the pulse width table for normal image formation is provided. FIG. 13 shows a pulse width table for normal image formation and a pulse width table used for the second correcting means of this embodiment.
図14に本実施の形態のブロック構成図を示す。図14を用いて、本実施形態の全体の処理の流れについて説明する。 FIG. 14 shows a block diagram of the present embodiment. The overall processing flow of this embodiment will be described with reference to FIG.
入力画像信号1401は中間調処理部1402にて疑似中間調処理された後に、第1の補正回路1403にて、走査線プロファイル1404に基づいてオフセット量算出回路1405で算出されたオフセット量に従って第1の補正処理が施される。その後、第2の補正回路1406において、ステップS102、S104で得られた長さ|S|の区間に対して第2の補正処理である平滑化処理を行う。その際に図13で示したような第2の補正用のパルス幅テーブル1407を用いて行い、出力画像信号1409として出力する。なお区間|S|以外の領域に関しては通常の画像形成用のパルス幅テーブル1408を用いて補正処理を行う。
After the
本実施の形態では、あらかじめ第2の補正手段である平滑化処理用に最適化された図13に示すようなパルス幅テーブルを用いるため、各パルス幅で露光する領域を、平滑化処理の際にあらためて形成される潜像に応じて最適化する必要がないという利点がある。 In this embodiment, since the pulse width table as shown in FIG. 13 optimized for the smoothing process, which is the second correction means, is used in advance, the area exposed at each pulse width is subjected to the smoothing process. There is an advantage that it is not necessary to optimize in accordance with the latent image formed again.
ここで平滑化区間Sの符号が正であった場合はパルス幅テーブルの正順で、平滑化区間Sの符号が負であった場合はパルス幅テーブルの逆順で1画素未満のドットを形成する。 Here, when the sign of the smoothing section S is positive, a dot of less than one pixel is formed in the forward order of the pulse width table, and when the sign of the smoothing section S is negative, the dot of less than one pixel is formed in the reverse order of the pulse width table. .
なお、本実施の形態では、説明を容易にするため、平滑化用ラインバッファと、オフセット用ラインバッファとを、別の構成で記載したが、実際には同一のラインバッファをそれぞれの目的で用いることが可能である。 In this embodiment, the smoothing line buffer and the offset line buffer are described in different configurations for ease of explanation, but actually, the same line buffer is used for each purpose. It is possible.
平滑化処理が終わると、図6のステップS67において、パルス幅データをプリンタに送信する。 When the smoothing process is completed, the pulse width data is transmitted to the printer in step S67 of FIG.
<全体の流れ>
ここまでの画像補正のイメージを図15に示す。図15Aは第1の補正を行ったイメージ図で、図15Aの画像に対して第2の補正を行うと図15Bに示すイメージとなる。補正された図15Bの画像データをレーザ露光すると図15Cに示すようなイメージで潜像が形成され、この潜像に対して画像形成を行うと結果として図15Dのような画像が得られる。なお、図中の▼印は第1の補正を行ったオフセットポイントである。
<Overall flow>
FIG. 15 shows an image of the image correction so far. FIG. 15A is an image diagram obtained by performing the first correction. When the second correction is performed on the image of FIG. 15A, the image shown in FIG. 15B is obtained. When the corrected image data of FIG. 15B is laser-exposed, a latent image is formed with an image as shown in FIG. 15C, and when this latent image is formed, an image as shown in FIG. 15D is obtained. In addition, the ▼ mark in the figure is the offset point where the first correction is performed.
<第1実施形態の効果>
以上見てきたように、レーザ光学系に固有の走査線プロファイルに応じてオフセットさせた画像データを記録する際に、オフセットした領域の近傍を平滑化する第2の補正を、第2の補正用に最適化されたパルス幅テーブルを用いて行なう。各パルス幅で露光する領域を、平滑化処理の際にあらためて形成される潜像に応じて最適化する必要がない。これにより、組立時に高価な部品を使用したり特殊な微調整を行うことなく主走査傾きや主走査歪みが補正された良好な画像を安価に提供することが可能となる。
<Effects of First Embodiment>
As described above, when recording the image data offset according to the scanning line profile unique to the laser optical system, the second correction for smoothing the vicinity of the offset region is used for the second correction. Is performed using a pulse width table optimized for the above. It is not necessary to optimize the area exposed at each pulse width according to the latent image formed again during the smoothing process. As a result, it is possible to provide a good image with corrected main scanning tilt and main scanning distortion at low cost without using expensive parts or performing special fine adjustment during assembly.
(第2実施形態)
第1実施形態では第2の補正手段として通常の画像形成用に最適化されたパルス幅テーブルとは別に、あらかじめ第2の補正手段用に最適化されたパルス幅テーブルを用いて平滑化処理を行う構成とした。しかし、電子写真方式の画像形成装置においては、温度や湿度などの画像形成条件によっては現像条件や転写条件が異なるため、同じ条件で潜像が形成されたとしても常に同じようにドットが再現されるとは限らない。特に1画素未満のドットを形成する場合は上記のような条件によってドットの再現が変動してしまい、結果として第2の補正手段で行われる平滑化処理が最適に行われないという懸念がある。そこで本実施の形態ではこうした画像形成条件の変動などが起こった場合でも、安定して微小ドットを利用した平滑化処理の効果を得ようとするものである。その他の構成及び作用については、第1実施形態と同様であるため、同じ構成については同じ符号を付してその説明を省略する。
(Second Embodiment)
In the first embodiment, smoothing processing is performed using a pulse width table optimized for the second correction unit in advance, as a second correction unit, in addition to the pulse width table optimized for normal image formation. The configuration is to be performed. However, in an electrophotographic image forming apparatus, development conditions and transfer conditions differ depending on image forming conditions such as temperature and humidity, so even if a latent image is formed under the same conditions, dots are always reproduced in the same way. Not necessarily. In particular, when dots of less than one pixel are formed, dot reproduction varies depending on the above conditions, and as a result, there is a concern that the smoothing process performed by the second correction unit is not optimally performed. Therefore, in this embodiment, even if such a change in image forming conditions occurs, an effect of smoothing processing using minute dots is obtained stably. Since other configurations and operations are the same as those in the first embodiment, the same components are denoted by the same reference numerals and description thereof is omitted.
本実施の形態では、不図示の環境センサから得られた温湿度データを元に算出された絶対水分量に従って図16に示すようにあらかじめ複数のパルス幅テーブルを記憶しておく。図16では例として絶対水分量情報に従って3種類のパルス幅テーブルを保持している。 In the present embodiment, a plurality of pulse width tables are stored in advance as shown in FIG. 16 according to the absolute water content calculated based on temperature and humidity data obtained from an environmental sensor (not shown). In FIG. 16, as an example, three types of pulse width tables are held according to the absolute water content information.
次に本実施の形態における補正のフロー図を図17に示す。第1実施形態において図10Bを用いて説明した第2の補正処理と同様の部分については同じ符号を付して説明を省略する。 Next, FIG. 17 shows a correction flowchart in the present embodiment. In the first embodiment, the same parts as those of the second correction process described with reference to FIG. 10B are denoted by the same reference numerals, and description thereof is omitted.
ステップS102又はS104で、平滑化処理が必要なドットであることを確認すると、ステップ175において、画像形成装置内に設けられた環境センサから得られる温湿度データを元に画像形成装置内部の絶対水分量を算出する。そして、その絶対水分量に応じて、図16に示すような複数のパルス幅テーブルから1つを選択する。そしてステップS105では、選択されたパルス幅テーブルに従ってステップ102、104で得られた平滑化区間|S|に対して、第2の補正処理である平滑化処理を実施する。
本実施の形態では、第1実施形態の効果に加えて、画像形成装置が環境条件によって変動した場合においても第2の補正の効果を変動に合わせて最適化することができるため、良好な画像を提供することが可能となる。
If it is confirmed in step S102 or S104 that the dot needs to be smoothed, in
In the present embodiment, in addition to the effects of the first embodiment, even when the image forming apparatus fluctuates due to environmental conditions, the second correction effect can be optimized according to the fluctuations. Can be provided.
(第3実施形態)
第2実施形態ではあらかじめパルス幅テーブルを複数保持し、環境センサから得られる環境条件に従って第2の補正手段に用いる最適なパルス幅テーブルを選択する構成とした。この場合、環境条件に応じて精度良く第2の補正手段を最適化するためには環境条件ごとに多くのパルス幅テーブルをあらかじめ保持する必要があり、構成が複雑になってしまうという課題が懸念される。本実施の形態では、基本パルス幅テーブルを1つ保持し、環境条件に従って補正係数を算出して基本パルス幅テーブルに補正係数を演算することにより環境条件に最適なパルス幅テーブルを生成する。その他の構成及び作用については、第1実施形態と同様であるため、同じ構成については同じ符号を付してその説明を省略する。
(Third embodiment)
In the second embodiment, a plurality of pulse width tables are held in advance, and the optimum pulse width table used for the second correction unit is selected according to the environmental conditions obtained from the environmental sensor. In this case, in order to optimize the second correction unit with high accuracy according to the environmental conditions, it is necessary to hold a large number of pulse width tables in advance for each environmental condition, and there is a concern that the configuration becomes complicated. Is done. In the present embodiment, one basic pulse width table is held, a correction coefficient is calculated according to the environmental conditions, and a correction coefficient is calculated in the basic pulse width table, thereby generating a pulse width table that is optimal for the environmental conditions. Since other configurations and operations are the same as those in the first embodiment, the same components are denoted by the same reference numerals and description thereof is omitted.
本実施形態における補正のフロー図を図18に示す。第1実施形態における図10Bと同様の部分については同じ符号を付して説明を省略する。 FIG. 18 shows a flowchart of correction in the present embodiment. Portions similar to those in FIG. 10B in the first embodiment are assigned the same reference numerals and description thereof is omitted.
ステップS102又はS104で、平滑化処理が必要なドットであることを確認すると、ステップ185で環境センサから得られる温湿度データを元に画像形成装置内部の絶対水分量を算出し、パルス幅テーブルを補正する補正係数を算出する。ステップ186では、算出された補正係数をパルス幅テーブルに演算することにより補正パルス幅テーブルを生成する。そして、生成されたパルス幅テーブルを用いてステップ102、104で得られた平滑化区間|S|に対して、第2の補正処理である平滑化処理を実施する。
If it is confirmed in step S102 or S104 that the dot needs to be smoothed, the absolute moisture content inside the image forming apparatus is calculated based on the temperature and humidity data obtained from the environmental sensor in
本実施の形態では、第2実施形態の効果に加えて、複数のパルス幅テーブルを保持する必要が無く、構成を簡易化して良好な画像を提供することが可能となる。 In the present embodiment, in addition to the effects of the second embodiment, there is no need to hold a plurality of pulse width tables, and it is possible to simplify the configuration and provide a good image.
(他の実施形態)
以上、本発明の実施形態について詳述したが、本発明は、複数の機器から構成されるシステムに適用しても良いし、また、一つの機器からなる装置に適用しても良い。
(Other embodiments)
Although the embodiments of the present invention have been described in detail above, the present invention may be applied to a system constituted by a plurality of devices or may be applied to an apparatus constituted by one device.
なお、本発明は、前述した実施形態の機能を実現する制御プログラムを、システム或いは装置に直接或いは遠隔から供給し、そのシステム或いは装置のプロセッサが、供給されたプログラムコードを読み出して実行することによっても達成される。したがって、本発明の機能処理をコンピュータで実現するために、コンピュータにインストールされるプログラムコード自体も本発明の技術的範囲に含まれる。 In the present invention, a control program for realizing the functions of the above-described embodiments is supplied directly or remotely to a system or apparatus, and the processor of the system or apparatus reads and executes the supplied program code. Is also achieved. Accordingly, the program code itself installed in the computer in order to realize the functional processing of the present invention by the computer is also included in the technical scope of the present invention.
その場合、制御プログラムの機能を有していれば、オブジェクトコード、インタプリタにより実行されるプログラム、OSに供給するスクリプトデータ等、プログラムの形態を問わない。 In that case, as long as it has a function of a control program, the form of the program is not limited, such as an object code, a program executed by an interpreter, script data supplied to the OS, and the like.
制御プログラムを供給するための記録媒体としては、例えば、フロッピー(登録商標)ディスク、ハードディスク、光ディスク、光磁気ディスクがある。また、MO、CD−ROM、CD−R、CD−RW、磁気テープ、不揮発性のメモリカード、ROM、DVD(DVD−ROM,DVD−R)などがある。 Examples of the recording medium for supplying the control program include a floppy (registered trademark) disk, a hard disk, an optical disk, and a magneto-optical disk. Further, there are MO, CD-ROM, CD-R, CD-RW, magnetic tape, nonvolatile memory card, ROM, DVD (DVD-ROM, DVD-R) and the like.
その他、クライアントPCのブラウザを用いてインターネットサイトに接続し、本発明に係るプログラムそのもの、若しくは更に自動インストール機能を含むファイルをハードディスク等の記録媒体にダウンロードするという利用方法もある。また、本発明に係るプログラムを構成するプログラムコードを複数のファイルに分割し、それぞれのファイルを異なるホームページからダウンロードすることによっても実現可能である。つまり、本発明の機能処理をコンピュータで実現するためのプログラムを複数のユーザに対してダウンロードさせるWWWサーバも、本発明の範疇に含まれる。 また、本発明に係るプログラムを暗号化してCD−ROM等の記憶媒体に格納してユーザに配布してもよい。所定の条件をクリアしたユーザに対し、インターネットを介してホームページから暗号化を解く鍵情報をダウンロードさせ、その鍵情報を使用することにより暗号化されたプログラムを実行してコンピュータにインストールさせて実現することも可能である。 In addition, there is a usage method in which a browser of a client PC is used to connect to an Internet site and a program according to the present invention itself or a file including an automatic installation function is downloaded to a recording medium such as a hard disk. It can also be realized by dividing the program code constituting the program according to the present invention into a plurality of files and downloading each file from a different homepage. That is, a WWW server that allows a plurality of users to download a program for realizing the functional processing of the present invention on a computer is also included in the scope of the present invention. Further, the program according to the present invention may be encrypted and stored in a storage medium such as a CD-ROM and distributed to users. This is realized by having a user who has cleared a predetermined condition download key information to be decrypted from a homepage via the Internet, execute the encrypted program by using the key information, and install it on a computer. It is also possible.
また、プログラムの指示に基づき、コンピュータ上で稼動しているOSなどが、実際の処理の一部又は全部を行ない、その処理によっても前述した実施形態の機能が実現され得る。 Further, the functions of the above-described embodiments can be realized by an OS or the like running on the computer based on an instruction of the program and performing part or all of the actual processing.
さらに、PCの機能拡張ユニットに備わるメモリに本発明に係るプログラムが書き込まれ、そのプログラムに基づき、その機能拡張ユニットに備わるCPUなどが実際の処理の一部又は全部を行なう場合も、本発明の範疇に含まれる。 Furthermore, when the program according to the present invention is written in the memory provided in the function expansion unit of the PC and the CPU or the like provided in the function expansion unit performs part or all of the actual processing based on the program, Included in the category.
3 現像器
4 感光ドラム
5 中間転写体
6 記録材
7 定着器
8 帯電器
9 クリーナ
20 プロセスカートリッジ
41 回転多面鏡モータ
42 回転多面鏡
43 f−θレンズ
44 反射ミラー
91 オフセット用ラインバッファ
101 平滑化用ラインバッファ
3 Developing
Claims (7)
前記感光体上に前記光ビームによって前記主走査方向に描かれる走査線の副走査方向への湾曲に応じて、注目画素の画像データの走査ラインを変更する変更手段と、
前記走査ラインが変更された画像データの画素と前記副走査方向において隣接し、白を示す画素の画像データを、1画素未満の大きさのドットを示す画像データに補正する補正手段と、
パルス幅テーブルを用いて、前記補正手段によって補正された画像データ以外の画像データおよび前記補正手段によって補正された画像データを、前記光源を制御するためのパルス幅データに変換するパルス幅変調手段と
を有し、
前記パルス幅テーブルは、画像データとパルス幅データとを対応付けたテーブルであり、
前記パルス幅変調手段は、前記補正手段によって補正された画像データ以外の画像データと前記補正手段によって補正された画像データとで異なるパルス幅テーブルを使用することを特徴とする画像処理装置。 A photosensitive member for forming a latent image; a light source for emitting a light beam for forming a latent image on the photosensitive member; and the light beam so that the light beam moves on the photosensitive member in a main scanning direction. An image processing apparatus for generating image data for an image forming apparatus having deflection means for deflecting a beam,
Changing means for changing a scan line of image data of a target pixel in accordance with a curve in a sub-scan direction of a scan line drawn in the main scan direction by the light beam on the photoconductor;
Correction means for correcting image data of pixels that are adjacent to the pixels of the image data in which the scan line has been changed in the sub-scanning direction and that indicate pixels that are white to image data that indicates dots having a size of less than one pixel;
Using a pulse width table, the image data corrected by the image data and the correction means other than the image data corrected by said correction means, and pulse width modulation means for converting the pulse width data for controlling the light source Have
The pulse width table is a table in which image data and pulse width data are associated with each other,
It said pulse width modulation means, the image processing apparatus characterized by the use of different pulse width table by the corrected image data by correcting image data other than image data and the correction means by said correcting means.
前記補正手段によって補正された画像データ以外の画像データについては、着目画素に隣接する画素が存在する場合と、当該着目画素に隣接する画素が存在せず、当該着目画素が孤立画素である場合とのいずれにも対応した第1のパルス幅テーブルを使用し、 For image data other than the image data corrected by the correcting means, there are a case where a pixel adjacent to the target pixel exists, a case where a pixel adjacent to the target pixel does not exist, and a case where the target pixel is an isolated pixel. Use the first pulse width table corresponding to any of
前記補正手段によって補正された画像データについては、着目画素に隣接する画素が存在する場合に対応した第2のパルス幅テーブルを使用する For the image data corrected by the correction means, the second pulse width table corresponding to the case where a pixel adjacent to the target pixel exists is used.
ことを特徴とする請求項1に記載の画像処理装置。The image processing apparatus according to claim 1.
ことを特徴とする請求項2に記載の画像処理装置。The image processing apparatus according to claim 2.
前記パルス幅変調手段は、
前記補正手段によって補正された画像データについては、前記保持手段が保持する前記複数のパルス幅テーブルから、前記画像形成装置内の環境条件に応じて選択したパルス幅テーブルを用いて、前記パルス幅データに変換する
ことを特徴とする請求項1乃至3のいずれか1項に記載の画像処理装置。 Holding means for holding a plurality of pulse width tables respectively corresponding to different temperatures and humidity,
The pulse width modulation means includes
For the image data corrected by the correction unit, the pulse width data is selected using a pulse width table selected from the plurality of pulse width tables held by the holding unit according to environmental conditions in the image forming apparatus. the image processing apparatus according to any one of claims 1 to 3, characterized in that to convert to.
前記補正手段によって補正された画像データについては、前記画像形成装置内の環境条件に応じて算出した補正係数によって前記パルス幅テーブルを補正して、補正後のパルス幅テーブルを用いて、前記パルス幅データに変換する
ことを特徴とする請求項1乃至3のいずれか1項に記載の画像処理装置。 The pulse width modulation means includes
For the image data corrected by the correcting means, the pulse width table is corrected by a correction coefficient calculated according to the environmental conditions in the image forming apparatus, and the pulse width table is corrected using the corrected pulse width table. the image processing apparatus according to any one of claims 1 to 3, characterized in that into data.
前記感光体上に潜像を形成するための光ビームを出射する光源と、
前記光ビームが前記感光体上を主走査方向に移動するように前記光ビームを偏向する偏向手段と、
前記感光体上に前記光ビームによって前記主走査方向に描かれる走査線の副走査方向への湾曲に応じて、注目画素の画像データの走査ラインを変更する変更手段と、
前記走査ラインが変更された画像データの画素と前記副走査方向において隣接し、白を示す画素の画像データを、1画素未満の大きさのドットを示す画像データに補正する補正手段と、
パルス幅テーブルを用いて、前記補正手段によって補正された画像データ以外の画像データおよび前記補正手段によって補正された画像データを前記光源を制御するためのパルス幅データに変換するパルス幅変調手段と
を有し、
前記パルス幅テーブルは、画像データとパルス幅データとを対応付けたテーブルであり、
前記パルス幅変調手段は、前記補正手段によって補正された画像データ以外の画像データと前記補正手段によって補正された画像データとで異なるパルス幅テーブルを使用することを特徴とする画像形成装置。 A photoreceptor for forming a latent image;
A light source that emits a light beam for forming a latent image on the photoreceptor;
Deflecting means for deflecting the light beam so that the light beam moves in the main scanning direction on the photosensitive member;
Changing means for changing a scan line of image data of a target pixel in accordance with a curve in a sub-scan direction of a scan line drawn in the main scan direction by the light beam on the photoconductor;
Correction means for correcting image data of pixels that are adjacent to the pixels of the image data in which the scan line has been changed in the sub-scanning direction and that indicate pixels that are white to image data that indicates dots having a size of less than one pixel;
Using a pulse width table, and a pulse width modulation means for converting the image data corrected by the image data other than the corrected image data by correcting means and the correction means to the pulse width data for controlling the light source Have
The pulse width table is a table in which image data and pulse width data are associated with each other,
It said pulse width modulation means, the image forming apparatus characterized by the use of different pulse width table by the corrected image data by correcting image data other than image data and the correction means by said correcting means.
変更手段が、前記感光体上に前記光ビームによって前記主走査方向に描かれる走査線の副走査方向への湾曲に応じて、注目画素の画像データの走査ラインを変更する変更工程と、
補正手段が、前記走査ラインが変更された画像データの画素と前記副走査方向において隣接し、白を示す画素の画像データを、1画素未満の大きさのドットを示す画像データに補正する補正工程と、
パルス幅変調手段が、パルス幅テーブルを用いて、前記補正工程において補正された画像データ以外の画像データおよび前記補正工程において補正された画像データを前記光源を制御するためのパルス幅データに変換するパルス幅変調工程と
を含み、
前記パルス幅テーブルは、画像データとパルス幅データとを対応付けたテーブルであり、
前記パルス幅変調工程は、前記補正工程において補正された画像データ以外の画像データと前記補正工程において補正された画像データとで異なるパルス幅テーブルを使用することを特徴とする画像処理方法。 A photosensitive member for forming a latent image; a light source for emitting a light beam for forming a latent image on the photosensitive member; and the light beam so that the light beam moves on the photosensitive member in a main scanning direction. An image processing method for generating image data for an image forming apparatus having deflection means for deflecting a beam,
A changing step of changing a scanning line of image data of a pixel of interest according to a curve in a sub-scanning direction of a scanning line drawn in the main scanning direction by the light beam on the photoconductor;
A correction step of correcting the image data of the pixel that is adjacent to the pixel of the image data in which the scanning line is changed in the sub-scanning direction and that indicates white and that has a size of less than one pixel. When,
Pulse width modulating means, using a pulse width table, converts the corrected image data in the correction step image data and the correction process other than the corrected image data in the pulse width data for controlling the light source A pulse width modulation process,
The pulse width table is a table in which image data and pulse width data are associated with each other,
The pulse width modulation process, an image processing method characterized by using different pulse width table by the corrected image data in the correction step and the image data other than the corrected image data in the correction step.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008147069A JP5222028B2 (en) | 2008-06-04 | 2008-06-04 | Image processing apparatus, image forming apparatus, and image processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008147069A JP5222028B2 (en) | 2008-06-04 | 2008-06-04 | Image processing apparatus, image forming apparatus, and image processing method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009294382A JP2009294382A (en) | 2009-12-17 |
| JP2009294382A5 JP2009294382A5 (en) | 2011-07-21 |
| JP5222028B2 true JP5222028B2 (en) | 2013-06-26 |
Family
ID=41542629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008147069A Expired - Fee Related JP5222028B2 (en) | 2008-06-04 | 2008-06-04 | Image processing apparatus, image forming apparatus, and image processing method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5222028B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5546553B2 (en) * | 2009-12-18 | 2014-07-09 | キヤノン株式会社 | Image forming apparatus |
| JP5601575B2 (en) * | 2010-03-18 | 2014-10-08 | 株式会社リコー | Image forming apparatus |
| JP2016150581A (en) * | 2015-02-19 | 2016-08-22 | キヤノン株式会社 | Image formation device |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3707505B2 (en) * | 1996-04-05 | 2005-10-19 | セイコーエプソン株式会社 | Optical printer |
| WO2003096675A1 (en) * | 2002-05-14 | 2003-11-20 | Fuji Xerox Co., Ltd. | Color image creating device and color image creating method |
| JP4268026B2 (en) * | 2002-12-03 | 2009-05-27 | 株式会社リコー | Image forming apparatus |
| JP2005007587A (en) * | 2003-06-16 | 2005-01-13 | Canon Inc | Image forming apparatus |
| JP2005242145A (en) * | 2004-02-27 | 2005-09-08 | Toshiba Corp | Color image forming device and method |
| JP4708908B2 (en) * | 2004-08-20 | 2011-06-22 | キヤノン株式会社 | Image forming apparatus and image forming method |
| JP2007290147A (en) * | 2006-04-21 | 2007-11-08 | Canon Inc | Image forming apparatus and laser beam controlling method |
| JP4950562B2 (en) * | 2006-05-31 | 2012-06-13 | キヤノン株式会社 | Color image forming apparatus and control method thereof |
| JP2008096735A (en) * | 2006-10-12 | 2008-04-24 | Sharp Corp | Image forming apparatus, program, recording medium and method for estimating toner consumption |
-
2008
- 2008-06-04 JP JP2008147069A patent/JP5222028B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009294382A (en) | 2009-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7746370B2 (en) | Image forming apparatus and method of controlling same | |
| US8634109B2 (en) | Image forming apparatus, and control method and control program thereof | |
| JP5341367B2 (en) | Image forming apparatus and control method thereof | |
| JP5790285B2 (en) | Image forming apparatus | |
| EP1622355A2 (en) | Image forming apparatus, image forming method and data control device | |
| JP5222028B2 (en) | Image processing apparatus, image forming apparatus, and image processing method | |
| US8335026B2 (en) | Image forming apparatus and color shift correction method thereof | |
| US7973988B2 (en) | Color image forming apparatus and control method thereof | |
| JP5329783B2 (en) | Image forming apparatus, control method thereof, and control program | |
| JP2008170640A (en) | Image forming apparatus and laser light-amount controller | |
| JP5060189B2 (en) | Image forming apparatus and control method thereof | |
| JP2008048165A (en) | Image forming apparatus and calibration method | |
| JP5917081B2 (en) | Image forming apparatus | |
| JP2009133994A (en) | Image forming apparatus, image forming method and its program | |
| JP6878901B2 (en) | Image forming device and image forming control program | |
| JP2007279238A (en) | Image forming apparatus and image forming method | |
| JP4926412B2 (en) | Image processing apparatus, control method therefor, and program | |
| JP2007055089A (en) | Color image forming device | |
| JP4403744B2 (en) | Correction data generation apparatus and light quantity correction method for optical print head | |
| JP2007144740A (en) | Image forming device, its control method and program | |
| JP4996378B2 (en) | Image forming apparatus | |
| JP5448600B2 (en) | Image forming apparatus | |
| JP5613019B2 (en) | Image forming apparatus, control method thereof, and program | |
| JP2006201556A (en) | Image forming apparatus | |
| JP2021047220A (en) | Image formation apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110603 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110603 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130308 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5222028 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |