JP5166111B2 - 車両周辺監視装置 - Google Patents
車両周辺監視装置 Download PDFInfo
- Publication number
- JP5166111B2 JP5166111B2 JP2008128366A JP2008128366A JP5166111B2 JP 5166111 B2 JP5166111 B2 JP 5166111B2 JP 2008128366 A JP2008128366 A JP 2008128366A JP 2008128366 A JP2008128366 A JP 2008128366A JP 5166111 B2 JP5166111 B2 JP 5166111B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- video
- pixel
- vehicle
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012806 monitoring device Methods 0.000 title claims description 32
- 238000012937 correction Methods 0.000 claims description 150
- 230000007547 defect Effects 0.000 claims description 129
- 238000012545 processing Methods 0.000 claims description 125
- 230000002950 deficient Effects 0.000 claims description 113
- 238000001514 detection method Methods 0.000 claims description 84
- 230000002093 peripheral effect Effects 0.000 claims description 70
- 238000006243 chemical reaction Methods 0.000 claims description 25
- 238000012544 monitoring process Methods 0.000 claims description 18
- 238000006073 displacement reaction Methods 0.000 claims description 5
- 238000003702 image correction Methods 0.000 claims 1
- 238000000034 method Methods 0.000 description 64
- 238000003384 imaging method Methods 0.000 description 22
- 240000004050 Pentaglottis sempervirens Species 0.000 description 14
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 14
- 230000006866 deterioration Effects 0.000 description 5
- 230000011218 segmentation Effects 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000001444 catalytic combustion detection Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
Images








Description
以下、本発明に係る車両周辺監視装置の第1実施形態について、図1乃至図5を参照して説明する。
使用画素補正処理手段としての使用画素補正処理部34を有しており、この使用画素補正処理部34には、分割部32および歪み補正処理部24がそれぞれ接続されている。
(第2実施形態)
以下、本発明に係る車両周辺監視装置の第2実施形態について、第1実施形態との相違点を中心として図6および図7を参照して説明する。
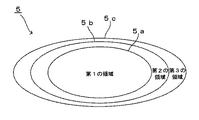
5 使用映像領域
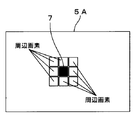
5A非重複領域
5B重複領域
5a第1の領域
5b第2の領域
5c第3の領域
7 映像不良部位
8 画像不良部位
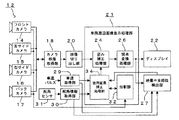
12 車両周辺監視装置
14 フロントカメラ
15 左サイドカメラ
16 右サイドカメラ
17 バックカメラ
21車両周辺画像表示処理部
22ディスプレイ
24歪み補正処理部
26視点変換処理部
27映像不良部位検出部
29車速取得部
30舵角情報取得部
32分割部
34補正処理部
Claims (8)
- 車両に搭載され、広角レンズを用いて前記車両の周辺における所定の撮影領域を撮影可能とされた複数台のカメラと、
これら複数台のカメラのそれぞれの撮影映像における各カメラごとの所定の使用映像領域内の映像を使用することによって、前記車両およびその周辺を前記車両の上方から俯瞰したような画像である車両周辺画像を生成して表示部に表示する車両周辺画像表示処理手段と
を備えた車両周辺監視装置であって、
車両周辺監視装置本体は、
前記複数台のカメラのそれぞれの撮影映像に基づいて、各カメラの汚れまたは傷を原因とした映像不良部位を、各カメラごとの前記使用映像領域内において検出可能とされた映像不良部位検出手段と、
前記車両の走行速度を取得する車速取得手段と、
前記車両の舵角情報を取得する舵角情報取得手段と
を備え、
前記車両周辺画像表示処理手段は、
前記複数台のカメラの前記使用映像領域内の映像ごとに、前記使用映像領域内の映像から抽出された所定の使用画素を使用することによって、当該使用映像領域内の映像の歪みを補正するための歪み補正処理を行う歪み補正処理手段と、
前記複数台のカメラの前記使用映像領域内の映像ごとに、前記使用画素を使用することによって、前記使用映像領域内の映像を前記車両の上方の仮想視点から俯瞰したような画像へと変換するための視点変換処理を行う視点変換処理手段と、
前記複数台のカメラの使用映像領域ごとに、前記使用映像領域を、前記複数台のカメラにおける他のカメラとの撮影映像の重複部分を有しないような領域である非重複領域と、前記他のカメラとの撮影映像の重複部分を有するような領域である重複領域とに分割した状態として把握する分割手段と、
この分割手段の分割結果および前記映像不良部位検出手段の検出結果に基づいて、前記複数台のカメラの前記使用映像領域内の映像ごとに前記使用画素の補正を行う使用画素補正処理手段と
を備えており、
前記使用画素補正処理手段は、
前記映像不良部位検出手段によって前記非重複領域内に映像不良部位が検出されている場合であって前記車両が走行している場合には、前記車速取得手段の取得結果と、前記舵角情報取得手段の取得結果と、最新の前記車両周辺画像の生成に用いられようとしている最新の撮影映像に対する所定フレーム前の撮影映像とに基づいて、前記所定フレーム前の撮影映像における所定フレーム後において前記映像不良部位と同一位置に結像されるべき画素を割り出し、割り出された前記画素を、前記非重複領域内に検出されている前記映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成され、
前記映像不良部位検出手段によって前記非重複領域内に映像不良部位が検出されている場合であって前記車両が静止している場合には、前記非重複領域内に検出されている前記映像不良部位の周辺に存在する画素に基づいて、前記非重複領域内に検出されている前記映像不良部位に相当する画素に代替すべき画素を割り出し、割り出された前記画素を、当該映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成され、
前記映像不良部位検出手段によって前記重複領域内に映像不良部位が検出されている場合には、前記他のカメラの前記重複部分における撮影映像の中から、当該映像不良部位と同一箇所の撮影結果に相当する画素を割り出し、割り出された前記画素を、前記重複領域内に検出されている前記映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成されていること
を特徴とする車両周辺監視装置。 - 前記非重複領域内に映像不良部位が検出されている場合であって前記車両が静止している場合における前記代替すべき画素は、前記非重複領域内に検出されている前記映像不良部位の周辺に存在する所定の複数の画素の平均画素値を有するような画素とされていること
を特徴とする請求項1に記載の車両周辺監視装置。 - 車両に搭載され、広角レンズを用いて前記車両の周辺における所定の撮影領域を撮影可能とされた複数台のカメラと、
これら複数台のカメラのそれぞれの撮影映像における各カメラごとの所定の使用映像領域内の映像を使用することによって、前記車両およびその周辺を前記車両の上方から俯瞰したような画像である車両周辺画像を生成して表示部に表示する車両周辺画像表示処理手段と
を備えた車両周辺監視装置であって、
車両周辺監視装置本体は、
前記複数台のカメラのそれぞれの撮影映像に基づいて、各カメラの汚れまたは傷を原因とした映像不良部位を、各カメラごとの前記使用映像領域内において検出可能とされた映像不良部位検出手段と、
前記車両の走行速度を取得する車速取得手段と、
前記車両の舵角情報を取得する舵角情報取得手段と
を備え、
前記車両周辺画像表示処理手段は、
前記複数台のカメラの前記使用映像領域内の映像ごとに、前記使用映像領域内の映像から抽出された所定の使用画素を使用することによって、当該使用映像領域内の映像の歪みを補正するための歪み補正処理を行う歪み補正処理手段と、
前記複数台のカメラの前記使用映像領域内の映像ごとに、前記使用画素を使用することによって、前記使用映像領域内の映像を前記車両の上方の仮想視点から俯瞰したような画像へと変換するための視点変換処理を行う視点変換処理手段と、
前記複数台のカメラの使用映像領域ごとに、前記使用映像領域を、前記複数台のカメラにおける他のカメラとの撮影映像の重複部分を有しないような領域である非重複領域であって、1画素分の前記使用画素が1画素分の前記車両周辺画像の生成に使用され、かつ、前記使用画素と前記使用画素以外の画素である非使用画素とが混在するような領域である第1の領域と、前記非重複領域であって、1画素分の前記使用画素が複数画素分の前記車両周辺画像の生成に使用され、かつ、全画素が車両周辺画像の生成に使用されるような領域である第2の領域と、前記他のカメラとの撮影映像の重複部分を有するような領域である重複領域からなる第3の領域とに分割した状態として把握する分割手段と、
この分割手段の分割結果および前記映像不良部位検出手段の検出結果に基づいて、前記複数台のカメラの前記使用映像領域内の映像ごとに前記使用画素の補正を行う使用画素補正処理手段と
を備えており、
前記使用画素補正処理手段は、
前記映像不良部位検出手段によって前記第1の領域内に映像不良部位が検出されている場合には、前記第1の領域内に検出されている前記映像不良部位の周辺に存在する前記非使用画素に基づいて、前記第1の領域内に検出されている前記映像不良部位に相当する画素に代替すべき画素を割り出し、割り出された前記画素を、当該映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成され、
前記映像不良部位検出手段によって前記第2の領域内に映像不良部位が検出されている場合であって前記車両が走行している場合には、前記車速取得手段の取得結果と、前記舵角情報取得手段の取得結果と、最新の前記車両周辺画像の生成に用いられようとしている最新の撮影映像に対する所定フレーム前の撮影映像とに基づいて、前記所定フレーム前の撮影映像における所定フレーム後において前記映像不良部位と同一位置に結像されるべき画素を割り出し、割り出された前記画素を、前記第2の領域内に検出されている前記映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成され、
前記映像不良部位検出手段によって前記第2の領域内に映像不良部位が検出されている場合であって前記車両が静止している場合には、前記第2の領域内に検出されている前記映像不良部位の周辺に存在する画素に基づいて、前記第2の領域内に検出されている前記映像不良部位に相当する画素に代替すべき画素を割り出し、割り出された前記画素を、当該映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成され、
前記映像不良部位検出手段によって前記第3の領域内に映像不良部位が検出されている場合には、前記他のカメラの前記重複部分における撮影映像の中から、当該映像不良部位と同一箇所の撮影結果に相当する画素を割り出し、割り出された前記画素を、前記第3の領域内に検出されている前記映像不良部位に相当する画素に代わって前記使用画素とする補正を行うように形成されていること
を特徴とする車両周辺監視装置。 - 前記第1の領域内に映像不良部位が検出されている場合における前記代替すべき画素は、前記第1の領域内に検出されている前記映像不良部位の周辺に存在する所定の複数の前記非使用画素の平均画素値を有するような画素とされていること
を特徴とする請求項3に記載の車両周辺監視装置。 - 前記第2の領域内に映像不良部位が検出されている場合であって前記車両が静止している場合における前記代替すべき画素は、前記第2の領域内に検出されている前記映像不良部位の周辺に存在する所定の複数の画素の平均画素値を有するような画素とされていること
を特徴とする請求項3または請求項4に記載の車両周辺監視装置。 - 前記映像不良部位検出手段は、前記車速取得手段の取得結果と、前記舵角情報取得手段の取得結果とを用いることによって、前記車両周辺画像上の各画素についてのフレームの変化にともなう予測される変位量を算出した上で、前記使用映像領域内の映像における前記フレームの変化にかかわらず前記算出された前記変位量を示していない前記車両周辺画像上の画素に対応する部位を、前記映像不良部位として検出するように形成されていること
を特徴とする請求項1乃至請求項5のいずれか1項に記載の車両周辺監視装置。 - 前記映像不良部位検出手段は、前記使用映像領域内の映像におけるフレームの変化にかかわらず映像が変化しない部位を前記映像不良部位として検出するように形成されていること
を特徴とする請求項1乃至請求項5のいずれか1項に記載の車両周辺監視装置。 - 前記広角レンズが、魚眼レンズとされていること
を特徴とする請求項1乃至請求項7のいずれか1項に記載の車両周辺監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008128366A JP5166111B2 (ja) | 2008-05-15 | 2008-05-15 | 車両周辺監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008128366A JP5166111B2 (ja) | 2008-05-15 | 2008-05-15 | 車両周辺監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009278428A JP2009278428A (ja) | 2009-11-26 |
| JP5166111B2 true JP5166111B2 (ja) | 2013-03-21 |
Family
ID=41443426
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008128366A Expired - Fee Related JP5166111B2 (ja) | 2008-05-15 | 2008-05-15 | 車両周辺監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5166111B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5546321B2 (ja) * | 2010-04-02 | 2014-07-09 | アルパイン株式会社 | 複数カメラ画像使用車外表示装置 |
| JP6330383B2 (ja) | 2014-03-12 | 2018-05-30 | 株式会社デンソー | 合成画像生成装置、および合成画像生成プログラム |
| JP6338930B2 (ja) * | 2014-05-23 | 2018-06-06 | カルソニックカンセイ株式会社 | 車両周囲表示装置 |
| US20230325983A1 (en) * | 2020-11-10 | 2023-10-12 | Mitsubishi Electric Corporation | Sensor noise removal device and sensor noise removal method |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4179079B2 (ja) * | 2002-08-30 | 2008-11-12 | 株式会社ニコン | 電子カメラ及びその制御プログラム |
| JP4611899B2 (ja) * | 2006-01-12 | 2011-01-12 | アルパイン株式会社 | カメラのレンズ汚れ検出装置及び画像表示システム |
| JP4248570B2 (ja) * | 2006-08-21 | 2009-04-02 | 三洋電機株式会社 | 画像処理装置並びに視界支援装置及び方法 |
-
2008
- 2008-05-15 JP JP2008128366A patent/JP5166111B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009278428A (ja) | 2009-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5108840B2 (ja) | 車両用周辺監視装置および車両用周辺画像表示方法 | |
| KR101611194B1 (ko) | 차량 주변 이미지 생성 장치 및 방법 | |
| KR101077584B1 (ko) | 복수개의 카메라로부터 획득한 영상을 정합하는 영상 처리 장치 및 방법 | |
| JPWO2013035353A1 (ja) | 画像処理装置及び画像処理方法 | |
| US10783665B2 (en) | Apparatus and method for image processing according to vehicle speed | |
| JP2010136289A (ja) | 運転支援装置及び運転支援方法 | |
| JP2008102620A (ja) | 画像処理装置 | |
| JP2015232442A (ja) | 画像処理装置及び車両前方監視装置 | |
| JP2012105090A (ja) | 駐車支援装置 | |
| JP5959311B2 (ja) | データ導出装置、及び、データ導出方法 | |
| JP5166111B2 (ja) | 車両周辺監視装置 | |
| JP2020068499A (ja) | 車両周囲画像表示システム及び車両周囲画像表示方法 | |
| JP2009267603A (ja) | 車両周辺監視装置およびこれに適用される歪み補正値の設定修正方法 | |
| EP3107063A1 (en) | Method for processing camera images | |
| TWI552907B (zh) | 行車安全輔助系統和方法 | |
| JP2006295346A (ja) | 画像処理装置及びこれを用いる車両用運転支援装置 | |
| WO2016072300A1 (ja) | 車両周辺画像表示装置、車両周辺画像表示方法 | |
| JP2010218058A (ja) | 運転支援装置及び運転支援方法 | |
| JP7029350B2 (ja) | 画像処理装置および画像処理方法 | |
| JP6960827B2 (ja) | 路面領域検出装置 | |
| JP2010130413A (ja) | 周辺状況表示装置 | |
| JP2008042759A (ja) | 画像処理装置 | |
| KR20110082873A (ko) | 복수개의 영상을 합성한 합성 영상에서 거리 정보를 제공하는 기능을 구비하는 영상 처리 장치 및 방법 | |
| JP2006178667A (ja) | 車両用映像補正装置及び車両用映像補正方法 | |
| JP2010121986A (ja) | 車載カメラ用のキャリブレーションターゲット及びキャリブレーションシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120601 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121220 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5166111 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |