JP5131908B2 - 歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 - Google Patents
歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 Download PDFInfo
- Publication number
- JP5131908B2 JP5131908B2 JP2007310903A JP2007310903A JP5131908B2 JP 5131908 B2 JP5131908 B2 JP 5131908B2 JP 2007310903 A JP2007310903 A JP 2007310903A JP 2007310903 A JP2007310903 A JP 2007310903A JP 5131908 B2 JP5131908 B2 JP 5131908B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- calculating
- horizontal
- acceleration data
- amplitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C22/00—Measuring distance traversed on the ground by vehicles, persons, animals or other moving solid bodies, e.g. using odometers, using pedometers
- G01C22/006—Pedometers
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Measurement Of Distances Traversed On The Ground (AREA)
- User Interface Of Digital Computer (AREA)
Description
accf←accf+(acc−accf)*C
で算出し、追従加速度ベクトルデータaccfを更新する。ここで、Cは追従係数であり、例えばC=0.15に設定される。このように、追従加速度ベクトルaccfは、現時点の加速度ベクトルaccの各軸成分値(accX、accY、accZ)に、所定の割合でそれぞれ追従させた各軸成分値を有しており、現時点の加速度ベクトルaccに所定の割合で逐次追従させたものである。上記算出式によって、追従加速度ベクトルaccfは、加速度ベクトルaccに追従するベクトルとして算出されているが、追従係数Cが非常に小さな値であるため、加速度ベクトルaccのX軸成分accX、Y軸成分accY、およびZ軸成分accZを平滑化したようなベクトルとなる。また、追従加速度ベクトルaccfは、常にコントローラ7に作用している重力加速度等の静的加速度成分を示すパラメータとしても扱うことができる。
vec←acc−accf
で算出し、追従成分除去ベクトルデータDcを更新する。上記算出式から明らかなように、追従成分除去ベクトルvecは、加速度ベクトルaccから追従加速度ベクトルaccfが減算されている。
Vw←vecgX*vecX+vecgY*vecY+vecgZ*vecZ
で算出する。そして、CPU10は、算出された重力方向成分Vwを用いて重力方向成分データDeを更新する。
Vsd=M/Vt
で算出する。ここで、Mは、第1の係数であり、例えばM=0.25である。そして、CPU10は、算出した目標値Vsdを用いて縦揺れの目標値データDkを更新する。
Vs←Vs+(Vsd−Vs)*0.3
で算出する。そして、CPU10は、算出した新たな縦揺れスピードVsを用いて、縦揺れスピードデータDlを更新する。
Vs←Vs*0.9
で減衰させる。そして、CPU10は、減衰させた新たな縦揺れスピードVsを用いて、縦揺れスピードデータDlを更新する。
Hvec←vec−vecg*Vw
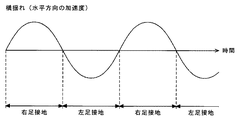
で算出する。そして、CPU10は、算出された水平方向成分ベクトルHvecを用いて水平方向成分ベクトルデータDmを更新する。
Hsd=N/Ht
で算出する。ここで、Nは、第2の係数であり、例えばN=0.5である。そして、CPU10は、算出した目標値Hsdを用いて横揺れの目標値データDsを更新する。
Hs←Hs+(Hsd−Hs)*0.3
で算出する。そして、CPU10は、算出した新たな横揺れスピードHsを用いて、横揺れスピードデータDtを更新する。
Hs←Hs*0.9
で減衰させる。そして、CPU10は、減衰させた新たな横揺れスピードHsを用いて、横揺れスピードデータDtを更新する。
St←St+Vs
で算出する。そして、CPU10は、算出された新たな歩数Stを用いて、歩数データDuを更新する。
St←St+Hs
で算出する。そして、CPU10は、算出された新たな歩数Stを用いて、歩数データDuを更新する。
r=ampV/ampH
で算出する。
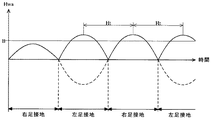
VT=Vh*2/|d|
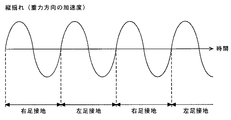
で算出する。ここで、dは、現時点の絶対値Vwaと最後の絶対値Vwalとの差分値(すなわち、1フレームあたりの絶対値Vwaの変化量)である。図19から明らかなように、時間間隔VTに対する絶対値Vwaの変化量は、縦揺れの山の高さVhの2倍となる。つまり、|d|*VT=2*Vhとなるため、上記数式を用いて時間間隔VTを求めることができる。
Vsd=M/Vt
で算出する。ここで、Mは、第1の係数であり、例えばM=0.25である。そして、CPU10は、算出した目標値Vsdを用いて、縦揺れの目標値データDkを更新する。
Vs←Vs+(Vsd−Vs)*0.1
で算出する。そして、CPU10は、算出した新たな縦揺れスピードVsを用いて、縦揺れスピードデータDlを更新する。
Vs←Vs*0.9
で減衰させる。そして、CPU10は、減衰させた新たな縦揺れスピードVsを用いて、縦揺れスピードデータDlを更新する。
HT=Hh*2/|e|
で算出する。ここで、eは、現時点の大きさHwaと最後の大きさHwalとの差分値(すなわち、1フレームあたりの大きさHwaの変化量)である。
Hsd=N/Ht
で算出する。ここで、Nは、第2の係数であり、例えばN=0.5である。そして、CPU10は、算出した目標値Hsdを用いて、横揺れの目標値データDsを更新する。
Hs←Hs+(Hsd−Hs)*0.1
で算出する。そして、CPU10は、算出した新たな横揺れスピードHsを用いて、横揺れスピードデータDtを更新する。
Hs←Hs*0.9
で減衰させる。そして、CPU10は、減衰させた新たな横揺れスピードHsを用いて、横揺れスピードデータDtを更新する。
2…モニタ
2a、706…スピーカ
3…ゲーム装置
4…光ディスク
5…ゲーム装置本体
10…CPU
11…システムLSI
12…外部メインメモリ
13…ROM/RTC
14…ディスクドライブ
15…AV−IC
16…AVコネクタ
17…フラッシュメモリ
18…無線通信モジュール
19…無線コントローラモジュール
20…拡張コネクタ
21…外部メモリカード用コネクタ
22、23…アンテナ
24…電源ボタン
25…リセットボタン
26…イジェクトボタン
31…入出力プロセッサ
32…GPU
33…DSP
34…VRAM
35…内部メインメモリ
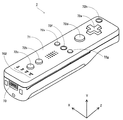
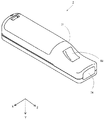
7…コントローラ
71…ハウジング
72…操作部
73…コネクタ
74…撮像情報演算部
741…赤外線フィルタ
742…レンズ
743…撮像素子
744…画像処理回路
75…通信部
751…マイコン
752…メモリ
753…無線モジュール
754…アンテナ
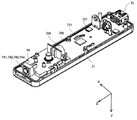
700…基板
701…加速度センサ
702…LED
704…バイブレータ
707…サウンドIC
708…アンプ
8…マーカ
Claims (21)
- 所定の筐体に加わる加速度を検出する加速度センサから出力される加速度データを用いて、当該筐体を携帯するユーザの歩数を算出する装置のコンピュータで実行される歩数算出プログラムであって、
前記コンピュータを、
前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記筐体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記筐体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
前記第1歩数および前記第2歩数を比較して、大きい一方をユーザの歩数として選択する歩数選択手段として機能させ、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出プログラム。 - 所定の筐体に加わる加速度を検出する加速度センサから出力される加速度データを用いて、当該筐体を携帯するユーザの歩数を算出する装置のコンピュータで実行される歩数算出プログラムであって、
前記コンピュータを、
前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記筐体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記筐体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
所定の条件に基づいて、前記第1歩数および前記第2歩数の一方をユーザの歩数として選択する歩数選択手段として機能させ、
前記歩数選択手段は、
前記重力方向加速度が増減する第1振幅を検出する第1振幅検出手段と、
前記水平方向加速度が増減する第2振幅を検出する第2振幅検出手段と、
前記第1振幅と前記第2振幅との比率を算出する比率算出手段とを含み、
前記歩数選択手段は、前記第1振幅が前記第2振幅の所定比率より大きければ前記第1歩数を選択して採用し、前記第1振幅が前記第2振幅の所定比率以下であれば前記第2歩数を選択して採用し、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出プログラム。 - 前記加速度データ取得手段が取得した加速度データを用いて、前記筐体における重力方向を算出する重力方向算出手段として、さらに前記コンピュータを機能させ、
前記重力方向加速度算出手段は、前記重力方向算出手段が算出した重力方向に基づいて、前記加速度データ取得手段が取得した加速度データが示す加速度の重力方向の成分を前記重力方向加速度として算出し、
前記水平方向加速度算出手段は、前記重力方向算出手段が算出した重力方向に基づいて、前記加速度データ取得手段が取得した加速度データが示す加速度の水平方向の成分を前記水平方向加速度として算出する、請求項1または2に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、前記重力方向加速度が増減する周期に応じて、前記第1歩数を算出し、
前記第2歩数算出手段は、前記水平方向加速度が増減する周期に応じて、前記第2歩数を算出する、請求項3に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、前記重力方向加速度が増減する周期に基づいて算出された単位時間あたりの歩数に、所定の割合で追従する歩数を前記第1歩数として算出し、
前記第2歩数算出手段は、前記水平方向加速度が増減する周期に基づいて算出された単位時間あたりの歩数に、所定の割合で追従する歩数を前記第2歩数として算出する、請求項4に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、前記重力方向加速度が増減する周期が所定の閾値より長い場合、前回の処理で算出された前記第1歩数を減衰させる第1減衰手段を含み、
前記第2歩数算出手段は、前記水平方向加速度が増減する周期が所定の閾値より長い場合、前回の処理で算出された前記第2歩数を減衰させる第2減衰手段を含む、請求項4に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、前記重力方向加速度が増減する極大値を検出する第1極大値検出手段を含み、
前記第2歩数算出手段は、前記水平方向加速度が増減する極大値を検出する第2極大値検出手段を含み、
前記第1歩数算出手段は、前記第1極大値検出手段が検出した極大値間の時間間隔に応じて、前記第1歩数を算出し、
前記第2歩数算出手段は、前記第2極大値検出手段が検出した極大値間の時間間隔に応じて、前記第2歩数を算出する、請求項4に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、前記第1の係数を前記第1極大値検出手段が検出した極大値間の時間間隔で除算することによって前記第1歩数を算出し、
前記第2歩数算出手段は、前記第2の係数を前記第2極大値検出手段が検出した極大値間の時間間隔で除算することによって前記第2歩数を算出し、
前記第2の係数は、前記第1の係数の2倍である、請求項7に記載の歩数算出プログラム。 - 前記第1極大値検出手段は、前記重力方向加速度の絶対値が増減する極大値を検出し、
前記第2極大値検出手段は、前記水平方向加速度の大きさが増減する極大値を検出する、請求項7に記載の歩数算出プログラム。 - 前記第1極大値検出手段は、前記重力方向加速度が増減する極大値のうち所定の基準値以上のもののみを検出し、
前記第2極大値検出手段は、前記水平方向加速度が増減する極大値のうち所定の基準値以上のもののみを検出する、請求項7に記載の歩数算出プログラム。 - 前記第1歩数算出手段は、
前記重力方向加速度が増減する極大値を検出する第1極大値検出手段と、
前記重力方向加速度の大きさに応じて、前記第1極大値検出手段が極大値を直前に検出した時点から次の極大値を検出するまでの時間間隔を予測する第1時間間隔予測手段とを含み、
前記第2歩数算出手段は、
前記水平方向加速度が増減する極大値を検出する第2極大値検出手段と、
前記水平方向加速度の大きさに応じて、前記第2極大値検出手段が極大値を直前に検出した時点から次の極大値を検出するまでの時間間隔を予測する第2時間間隔予測手段とを含み、
前記第1歩数算出手段は、前記第1時間間隔予測手段が予測した時間間隔に応じて、前記第1歩数を算出し、
前記第2歩数算出手段は、前記第2時間間隔予測手段が予測した時間間隔に応じて、前記第2歩数を算出する、請求項4に記載の歩数算出プログラム。 - 前記第1時間間隔予測手段は、前記第1極大値検出手段が直前に検出した極大値の大きさと、前記重力方向加速度の値の変化量とを用いて、前記時間間隔を予測し、
前記第2時間間隔予測手段は、前記第2極大値検出手段が直前に検出した極大値の大きさと、前記水平方向加速度の値の変化量とを用いて、前記時間間隔を予測する、請求項11に記載の歩数算出プログラム。 - 前記歩数選択手段は、選択して採用した前記第1歩数または前記第2歩数を順次累積して累積歩数を算出する累積歩数算出手段を含む、請求項1乃至3の何れか1つに記載の歩数算出プログラム。
- 前記重力方向算出手段は、前記加速度データ取得手段が取得した加速度データが示す加速度ベクトルに所定の割合で追従するベクトルの方向を、前記筐体における重力方向として算出する、請求項3に記載の歩数算出プログラム。
- 前記重力方向加速度算出手段は、前記重力方向算出手段が算出した重力方向に基づいて、前記加速度データ取得手段が取得した加速度データが示す加速度ベクトルから前記追従するベクトルを減算した後の重力方向の成分を前記重力方向加速度として算出し、
前記水平方向加速度算出手段は、前記重力方向算出手段が算出した重力方向に基づいて、前記加速度データ取得手段が取得した加速度データが示す加速度ベクトルから前記追従するベクトルを減算した後の水平方向の成分を前記水平方向加速度として算出する、請求項14に記載の歩数算出プログラム。 - 携帯するユーザの歩数を算出する歩数算出装置であって、
装置本体に加わる加速度を検出して加速度データを出力する加速度センサと、
前記装置本体に設けられた表示部と、
前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記装置本体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記装置本体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
前記第1歩数および前記第2歩数を比較して、大きい一方をユーザの歩数として選択する歩数選択手段と、
前記歩数選択手段が選択した歩数に応じた情報を前記表示部に表示する表示制御手段とを備え、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出装置。 - 携帯するユーザの歩数を算出する歩数算出装置であって、
装置本体に加わる加速度を検出して加速度データを出力する加速度センサと、
前記装置本体に設けられた表示部と、
前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記装置本体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記装置本体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
所定の条件に基づいて、前記第1歩数および前記第2歩数の一方をユーザの歩数として選択する歩数選択手段と、
前記歩数選択手段が選択した歩数に応じた情報を前記表示部に表示する表示制御手段とを備え、
前記歩数選択手段は、
前記重力方向加速度が増減する第1振幅を検出する第1振幅検出手段と、
前記水平方向加速度が増減する第2振幅を検出する第2振幅検出手段と、
前記第1振幅と前記第2振幅との比率を算出する比率算出手段とを含み、
前記歩数選択手段は、前記第1振幅が前記第2振幅の所定比率より大きければ前記第1歩数を選択して採用し、前記第1振幅が前記第2振幅の所定比率以下であれば前記第2歩数を選択して採用し、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出装置。 - ユーザによって携帯可能な携帯機と、有線または無線通信を介して当該携帯機と接続される本体機とを含み、当該携帯機を携帯するユーザの歩数を算出する歩数算出システムであって、
前記携帯機本体に加わる加速度を検出して加速度データを出力する加速度センサと、
前記加速度センサから前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記携帯機における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記携帯機における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
前記第1歩数および前記第2歩数を比較して、大きい一方をユーザの歩数として選択する歩数選択手段と、
前記歩数選択手段が選択した歩数に応じた情報を表示装置に表示する表示制御手段とを備え、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出システム。 - ユーザによって携帯可能な携帯機と、有線または無線通信を介して当該携帯機と接続される本体機とを含み、当該携帯機を携帯するユーザの歩数を算出する歩数算出システムであって、
前記携帯機本体に加わる加速度を検出して加速度データを出力する加速度センサと、
前記加速度センサから前記加速度データを繰り返し取得する加速度データ取得手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記携帯機における重力方向に作用する重力方向加速度を算出する重力方向加速度算出手段と、
前記加速度データ取得手段が取得した加速度データを用いて、前記携帯機における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出手段と、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出手段と、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出手段と、
所定の条件に基づいて、前記第1歩数および前記第2歩数の一方をユーザの歩数として選択する歩数選択手段と、
前記歩数選択手段が選択した歩数に応じた情報を表示装置に表示する表示制御手段とを備え、
前記歩数選択手段は、
前記重力方向加速度が増減する第1振幅を検出する第1振幅検出手段と、
前記水平方向加速度が増減する第2振幅を検出する第2振幅検出手段と、
前記第1振幅と前記第2振幅との比率を算出する比率算出手段とを含み、
前記歩数選択手段は、前記第1振幅が前記第2振幅の所定比率より大きければ前記第1歩数を選択して採用し、前記第1振幅が前記第2振幅の所定比率以下であれば前記第2歩数を選択して採用し、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出システム。 - 所定の筐体に加わる加速度を検出する加速度センサから出力される加速度データを用いて、当該筐体を携帯するユーザの歩数を算出する歩数算出方法であって、
前記加速度データを繰り返し取得する加速度データ取得ステップと、
前記加速度データ取得ステップにおいて取得された加速度データを用いて、前記筐体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出ステップと、
前記加速度データ取得ステップにおいて取得された加速度データを用いて、前記筐体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出ステップと、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出ステップと、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出ステップと、
前記第1歩数および前記第2歩数を比較して、大きい一方をユーザの歩数として選択する歩数選択ステップとを含み、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出方法。 - 所定の筐体に加わる加速度を検出する加速度センサから出力される加速度データを用いて、当該筐体を携帯するユーザの歩数を算出する歩数算出方法であって、
前記加速度データを繰り返し取得する加速度データ取得ステップと、
前記加速度データ取得ステップにおいて取得された加速度データを用いて、前記筐体における重力方向に作用する重力方向加速度を算出する重力方向加速度算出ステップと、
前記加速度データ取得ステップにおいて取得された加速度データを用いて、前記筐体における重力方向に対して垂直な水平方向に作用する水平方向加速度を算出する水平方向加速度算出ステップと、
第1の係数を用いて前記重力方向加速度の変化に応じた第1歩数を算出する第1歩数算出ステップと、
第2の係数を用いて前記水平方向加速度の変化に応じた第2歩数を算出する第2歩数算出ステップと、
所定の条件に基づいて、前記第1歩数および前記第2歩数の一方をユーザの歩数として選択する歩数選択ステップとを含み、
前記歩数選択ステップは、
前記重力方向加速度が増減する第1振幅を検出する第1振幅検出ステップと、
前記水平方向加速度が増減する第2振幅を検出する第2振幅検出ステップと、
前記第1振幅と前記第2振幅との比率を算出する比率算出ステップとを含み、
前記歩数選択ステップでは、前記第1振幅が前記第2振幅の所定比率より大きければ前記第1歩数が選択されて採用され、前記第1振幅が前記第2振幅の所定比率以下であれば前記第2歩数が選択されて採用され、
前記第1の係数および前記第2の係数は、前記水平方向加速度の増減する周期が前記重力方向加速度の増減する周期の2倍であることにしたがって決められる値である、歩数算出方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007310903A JP5131908B2 (ja) | 2007-11-30 | 2007-11-30 | 歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 |
| US12/068,054 US7684958B2 (en) | 2007-11-30 | 2008-02-01 | Storage medium having step count calculation program stored therein, step count calculation apparatus, and step count calculation system |
| US12/654,114 US7966148B2 (en) | 2007-11-30 | 2009-12-10 | Storage medium having step count calculation program stored therein, step count calculation apparatus, and step count calculation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007310903A JP5131908B2 (ja) | 2007-11-30 | 2007-11-30 | 歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009134572A JP2009134572A (ja) | 2009-06-18 |
| JP5131908B2 true JP5131908B2 (ja) | 2013-01-30 |
Family
ID=40676629
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007310903A Active JP5131908B2 (ja) | 2007-11-30 | 2007-11-30 | 歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7684958B2 (ja) |
| JP (1) | JP5131908B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5294442B2 (ja) * | 2006-09-13 | 2013-09-18 | 任天堂株式会社 | ゲーム装置およびゲームプログラム |
| US20100292007A1 (en) * | 2007-06-26 | 2010-11-18 | Nintendo Of America Inc. | Systems and methods for control device including a movement detector |
| JP5527940B2 (ja) | 2008-04-16 | 2014-06-25 | 任天堂株式会社 | ゲームシステム、ゲームプログラム、ゲーム装置、サーバおよびゲーム方法 |
| TWI356722B (en) * | 2008-05-12 | 2012-01-21 | Princeton Technology Corp | Game controller with speaker |
| US9062976B2 (en) * | 2008-07-29 | 2015-06-23 | Kyocera Corporation | Portable electronic device including a pedometer function with suppression of counting errors |
| JP4644274B2 (ja) * | 2008-07-29 | 2011-03-02 | 京セラ株式会社 | 携帯機器、歩数カウント方法および重力方向検出方法 |
| US10564178B2 (en) * | 2012-12-21 | 2020-02-18 | Qualcomm Incorporated | Swing compensation in step detection |
| JP6496996B2 (ja) * | 2013-11-05 | 2019-04-10 | セイコーエプソン株式会社 | 運動諸量算出方法、運動諸量算出装置及び携帯機器 |
| CN104949685B (zh) * | 2015-05-22 | 2018-04-27 | 邓伟廷 | 能在多模式多部位实现精确计步的方法及其装置 |
| JP6804087B2 (ja) * | 2017-04-05 | 2020-12-23 | 株式会社タニタ | 歩数計測プログラム及び携帯端末 |
| CN110168315B (zh) | 2017-08-23 | 2021-10-22 | 华为技术有限公司 | 基于加速信息的足部计步方法、装置及设备 |
| JP2020113098A (ja) * | 2019-01-15 | 2020-07-27 | 日本電信電話株式会社 | 歩数計測装置および方法、並びにプログラム |
| JP6770145B1 (ja) | 2019-07-05 | 2020-10-14 | 任天堂株式会社 | 情報処理プログラム、情報処理システム、情報処理装置、および、情報処理方法 |
| JP6670028B1 (ja) * | 2019-07-18 | 2020-03-18 | 任天堂株式会社 | 情報処理システム、情報処理プログラム、情報処理装置、および情報処理方法 |
| US11273367B1 (en) * | 2019-09-24 | 2022-03-15 | Wayne Hughes Beckett | Non-CRT pointing device |
| JP2021000421A (ja) * | 2020-02-20 | 2021-01-07 | 任天堂株式会社 | 装置、システム、ゲームシステム、および、装置セット |
| JP7162911B2 (ja) * | 2020-11-24 | 2022-10-31 | 株式会社タニタ | 歩数計測プログラム及び携帯端末 |
| CN113340322B (zh) * | 2021-06-25 | 2023-04-07 | 歌尔科技有限公司 | 一种计步方法、装置、电子设备及可读存储介质 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5574479A (en) * | 1994-01-07 | 1996-11-12 | Selectech, Ltd. | Optical system for determining the roll orientation of a remote unit relative to a base unit |
| GB2289756B (en) * | 1994-05-26 | 1998-11-11 | Alps Electric Co Ltd | Space coordinates detecting device and input apparatus using same |
| JP3256472B2 (ja) * | 1996-09-11 | 2002-02-12 | セイコーインスツルメンツ株式会社 | Gps受信装置 |
| US6301964B1 (en) * | 1997-10-14 | 2001-10-16 | Dyhastream Innovations Inc. | Motion analysis system |
| US20010030667A1 (en) * | 2000-04-10 | 2001-10-18 | Kelts Brett R. | Interactive display interface for information objects |
| JP3772887B2 (ja) | 2000-10-16 | 2006-05-10 | オムロンヘルスケア株式会社 | 体動検出装置 |
| JP3543778B2 (ja) * | 2000-10-16 | 2004-07-21 | オムロンヘルスケア株式会社 | 歩数計 |
| US6982697B2 (en) * | 2002-02-07 | 2006-01-03 | Microsoft Corporation | System and process for selecting objects in a ubiquitous computing environment |
| JP4243684B2 (ja) * | 2003-10-07 | 2009-03-25 | 独立行政法人産業技術総合研究所 | 歩行動作検出処理装置および歩行動作検出処理方法 |
| PL1741088T3 (pl) * | 2004-04-30 | 2012-08-31 | Hillcrest Lab Inc | Urządzenia wskazujące w przestrzeni swobodnej, z kompensacją nachylenia i usprawnioną użytecznością |
| WO2006014810A2 (en) * | 2004-07-29 | 2006-02-09 | Kevin Ferguson | A human movement measurement system |
| JP4967368B2 (ja) * | 2006-02-22 | 2012-07-04 | ソニー株式会社 | 体動検出装置、体動検出方法および体動検出プログラム |
| JP4151983B2 (ja) * | 2006-04-27 | 2008-09-17 | 任天堂株式会社 | 移動方向算出装置および移動方向算出プログラム |
| FI122712B (fi) * | 2007-07-11 | 2012-06-15 | Vti Technologies Oy | Menetelmä ja laite liikkujan etenemisen mittaamiseksi |
-
2007
- 2007-11-30 JP JP2007310903A patent/JP5131908B2/ja active Active
-
2008
- 2008-02-01 US US12/068,054 patent/US7684958B2/en active Active
-
2009
- 2009-12-10 US US12/654,114 patent/US7966148B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20100121605A1 (en) | 2010-05-13 |
| US7966148B2 (en) | 2011-06-21 |
| JP2009134572A (ja) | 2009-06-18 |
| US7684958B2 (en) | 2010-03-23 |
| US20090144020A1 (en) | 2009-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5131908B2 (ja) | 歩数算出プログラム、歩数算出装置、歩数算出システム、および歩数算出方法 | |
| JP4916390B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および情報処理方法 | |
| JP4668236B2 (ja) | 情報処理プログラムおよび情報処理装置 | |
| JP5430246B2 (ja) | ゲーム装置およびゲームプログラム | |
| JP5582629B2 (ja) | 情報処理装置および情報処理プログラム | |
| US7716008B2 (en) | Acceleration data processing program, and storage medium, and acceleration data processing apparatus for use with the same | |
| US8096881B2 (en) | Storage medium storing game program and game apparatus | |
| JP5420824B2 (ja) | ゲーム装置およびゲームプログラム | |
| JP5173174B2 (ja) | ゲーム装置、ゲームプログラム、ゲームシステム、およびゲーム処理方法 | |
| JP4919887B2 (ja) | 画像処理プログラムおよび画像処理装置 | |
| JP5429918B2 (ja) | 情報処理プログラムおよび情報処理装置 | |
| JP4988273B2 (ja) | ゲームプログラムおよびゲーム装置 | |
| JP5358168B2 (ja) | ゲーム装置およびゲームプログラム | |
| JP2013175208A (ja) | 情報処理装置および情報処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101020 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110902 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20111111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120830 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121101 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121102 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5131908 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |