JP5045129B2 - 行動分析装置及びプログラム - Google Patents
行動分析装置及びプログラム Download PDFInfo
- Publication number
- JP5045129B2 JP5045129B2 JP2007024545A JP2007024545A JP5045129B2 JP 5045129 B2 JP5045129 B2 JP 5045129B2 JP 2007024545 A JP2007024545 A JP 2007024545A JP 2007024545 A JP2007024545 A JP 2007024545A JP 5045129 B2 JP5045129 B2 JP 5045129B2
- Authority
- JP
- Japan
- Prior art keywords
- subject
- target person
- observation area
- observation
- entropy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























Description
例えば、非接触方式で内部メモリに記憶した情報を外部のセンサ(例えば、リーダ装置)から読み取ることができる記憶媒体(例えば、RFID等)を用いて、対象者が建物内を行動(周回)するパターンを収集する行動データ処理システムが提案されている(特許文献1参照。)。
また、対象者の行動における遷移関係をグラフ表示するシステムに、モデルの単純性と情報量という尺度を取り入れてグラフを簡略化する行動データ表示装置が提案されている(特許文献2参照。)。
また、 携帯端末、PHS、GPSといった情報通信端末を用いて、情報通信端末を携帯する対象者の行動を推測して記録する行動管理システムが提案されている(特許文献4参照。)。
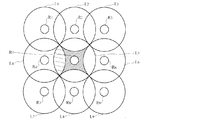
また、複数の観測エリアが隣接している場合には、これら観測エリア間に空白領域(すなわち、いずれのセンサの無線通信範囲がカバーしない領域)が生じれしまわないようにするため、接触方式で情報を読取る方法では、各センサによる無線通信範囲の縁部をオーバーラップさせた状態に設定する。このため、このオーバーラップした領域で検出された識別情報がいずれの観測エリアに存する対象者からのものか判然とせず、これにより、対象者の行動分析処理に誤りが生じてしまう欠点があった。
図1には、本発明の一実施例に係る行動分析システムの構成を示してある。
本例のシステムは、1又は複数の観測エリア毎に設置された1又は複数のセンサRと、センサRによる検出に基づいて1又は複数の対象者の行動を解釈する行動分析装置1とを有している。
なお、本例では、行動分析装置1が有する本発明に係る各機能手段は、行動分析装置1のコンピュータハードウエアで本発明に係る行動分析プログラムを実行することで構成されるが、本発明では、これら各機能手段を専用のハードウエアとして行動分析装置を構成するようにしてもよい。また、本発明に係る行動分析プログラムは、CDROM等の記憶媒体に記憶させた形式で、本発明の実施者に提供することができる。
より具体的には、本例のセンサRは、質問信号としての無線電波を常時或いは間欠的に発信しており、無線通信範囲内(すなわち、無線電波のおよぶ範囲内)に存する記憶媒体Cからその対象者識別情報を非接触で読取る。
また、本例の記憶媒体CとセンサRとの構成は、センサR側からの質問に応答して記憶媒体Cが対象者識別情報を応答する方式であるが、本発明では、記憶媒体Cが常時或いは間欠的に記憶した対象者識別情報を自発的に発信し、センサRが発信されている対象者識別情報を自己の無線通信範囲内で受信する方式とする等、対象者が携帯する記憶媒体Cから非接触方式で当該対象者を識別する情報を読取ることができれば種々な方式を採用することができる。
また、本例では対象者識別情報として対象者IDを用いるが、本発明では、対象者の名前等、個々の対象者を識別できる情報であれば種々な情報を採用することができる。
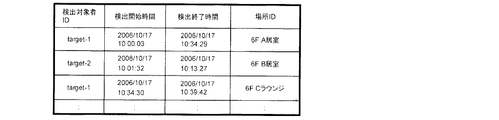
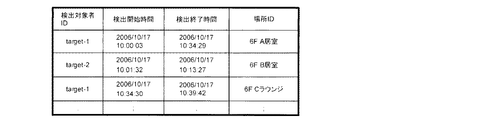
すなわち、行動分析装置1には設置された各センサの位置を登録したテーブルが設けられており、検出した対象者IDを入力してきたセンサを判別することで、当該対象者IDが検出された位置情報(観測エリア)を得ることができる。
また、同様に、行動分析装置1には時間を計時するタイマが設けられており、センサから検出した対象者IDが入力されてきた時刻を判別することで、当該対象者IDが検出された時刻情報を得ることができる。
したがって、例えばセンサR5について言えば、無線通信範囲L5の中心部分ではセンサR5だけの電波が支配するが、無線通信範囲L5の縁部ではセンサR5に隣接する(無線通信範囲がオーバーラップする)他のセンサR2、R4、R6、R8との輻輳が生じ、センサR5と他のセンサR2、R4、R6、R8とのいずれも記憶媒体Cから対象者IDを読取ることができてしまう事態が生じる。
そして、組織行動解釈手段4が当該推定された対象者の検出観測エリアの偏り度合いに基づいて対象者IDで特定される対象者の行動を解釈し、結果通知/格納手段5が当該解釈された対象者の行動を示す情報を出力或いは記憶格納する。
すなわち、移動状態推定手段3は、対象者全員(例えば、分析対象とする組織等の集団を構成する全員)のエントロピーの分布を算出し、その平均値と或る対象者のエントロピーを比較して、平均値より大きい場合は当該対象者は「活発に動き回っている」、平均値より小さい場合は「あまり動いていない」といったように推定することができる。
なお、Put(ai)は或る対象者uの或る期間tにおける観測エリアaIでの検出頻度、Aは観測エリアの集合(全観測エリア)である。

図3〜図11は実施例1に係る図であり、実施例1は、1又は複数の対象者から構成される集団(組織、部門等)について、その活動状態を行動分析によって把握するものである。
図3に示すように、組織を構成する対象者Pが活動する全観測エリアを複数(図示では9個)の観測エリアLに分割し、各観測エリアLにセンサRをそれぞれ設置して、各観測エリアLに静止している対象者Pの記憶媒体C及び各観測エリアLに移動してきた対象者Pの記憶媒体Cから、それぞれ対象者IDをセンサRで検出して行動分析装置1へ入力するようにしている。
なお、図4に示す例では、複数の組織A〜Eについてそれぞれ活動状態を解釈し、それら各組織についての活動様態を棒グラフ形式で可視化する或いは記述を含む表形式で可視化している。
なお、本例では、分析対象期間を日をもって指定しているが、勿論、日時等といった他の形式の時間情報で指定するようにしてもよい。
そして、処理結果通知/格納手段5が、上記算出結果に基づいて、図9に示すように、組織(部門)毎の「動き回っている」対象者と「あまり動いていない」対象者の割合を棒グラフ形式で可視化して画面表示等によってオペレータに提示する(ステップS15)。
この態様では、各観測エリアLに設置したセンサRと位置情報とを対応付けたテーブルにテリトリー分けを設定することで、図12に示すように、部門AのエリアLA、部門BのエリアLB、部門CのエリアLCといったように全観測エリアを各組織がよく利用するテリトリーに分けている。
実施例1と同様に、組織を構成する対象者Pが活動する全観測エリアを複数(図示では9個)の観測エリアLに分割し、各観測エリアLにセンサRをそれぞれ設置して、各観測エリアLに静止している対象者Pの記憶媒体C及び各観測エリアLに移動してきた対象者Pの記憶媒体Cから、それぞれ対象者IDをセンサRで検出して行動分析装置1へ入力するようにしている。
なお、上記実施例1による処理を併用して各対象者の行動状態を解釈し、図17に示すように、検出対象者aは「出向くことが多い」、検出対象者bは「相手が来ることが多い」と言ったような記述を含む表形式で出力してもよい。
なお、このように比較的短い所定時間t毎の平均エントロピーを用いることで、「移動」又は「静止」の推定精度を向上させている。
なお、本例では、分析対象期間を日をもって指定しているが、勿論、日時等といった他の形式の時間情報で指定するようにしてもよい。
図23に示す処理では、推定結果から分析を行う対象者(terget)を一人取り出し(ステップS41)、当該分析対象者の所定時間t内における移動状態を取り出し(ステップS42)、当該分析対象者の移動状態が、所定時間tでは「静止」であり、且つ、1つ前の所定時間t-1では「移動」であるかを判定する(ステップS43)。
この態様では、図26に示すように、行動分析装置1が更に被験者情報保持手段7を有しており、被験者情報保持手段7に記録されている各対象者の属性(例えば、組織内の役職や職種、性別、年齢等といった個人属性)を参照して、組織行動解釈手段4が、対象者の属性を峻別して対象者の行動を解釈する。
例えば役職といった属性を峻別して対象者の行動解釈を行うことにより、図27に示すように、同じ観測エリアで同居した相手の対象者を職階で分類して、検出対象者aは「部下に対して出向くことが多い」「同階層に対して出向くことが多い」といったような記述を含む表形式で解釈結果を出力することができる。
対象者Pが活動する全エリア中の少なくとも特定のエリアLにセンサRを設置して、特定観測エリアLに静止している対象者Pの記憶媒体C及び特定観測エリアLに移動してきた対象者Pの記憶媒体Cから、それぞれ対象者IDをセンサRで検出して行動分析装置1へ入力するようにしている。
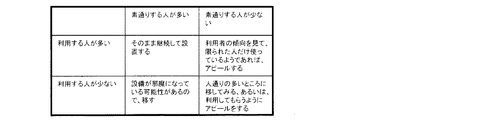
そして、処理結果通知/格納手段5が、組織行動解釈手段4により解釈された結果に基づいて、図30に示すように、特定観測エリアの利用状況に関する記述を含む表形式で可視化して出力する。
なお、本例では、分析対象期間を日をもって指定しているが、勿論、日時等といった他の形式の時間情報で指定するようにしてもよい。
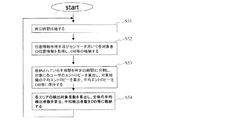
そして、組織行動解釈手段4が、分析対象期間中の特定観測エリアにおける「移動中」の対象者数と「静止中」の対象者数との割合を算出し(ステップS64)、また、分析対象期間中の特定観測エリアにおける平均対象者数を算出して、全観測エリアの平均対象者数と特定観測エリアにおける平均対象者数との割合を算出する(ステップS65)。
なお、このように比較的短い所定時間t毎の平均エントロピーを用いることで、「移動」又は「静止」の推定精度を向上させている。
なお、本例では、分析対象期間を日をもって指定しているが、勿論、日時等といった他の形式の時間情報で指定するようにしてもよい。
組織行動解釈手段4は、上記推定結果に基づいて図23に示す処理を行い、処理結果通知/格納手段5がその処理結果を図33に示すようなグラフ形式で可視化して画面表示等によってオペレータに提示する(ステップS84)。
例えば、観測エリア毎に当該エリアの識別情報を定期的又は対象者検出時に発信する装置を設け、これを観測エリアにいる対象者側で受信して観測エリア識別情報と当該対象者の識別情報と当該検出時刻とを組にして記憶装置に記憶し、後に、当該記憶装置から読取って情報の組を取得する方法であってもよい。
また、例えば、観測エリア毎に当該エリアの識別情報を定期的又は対象者検出時に発信する装置を設け、これを観測エリアにいる対象者側で受信して観測エリア識別情報と当該対象者の識別情報との組を観測エリア側の装置に返し、観測エリア側の装置から当該組及び当該検出時刻とを取得する方法であってもよい。
3:移動状態推定手段、 4:組織行動解釈手段、
5:処理結果通知/格納手段、 6:入力手段、
C:記憶媒体、 P:対象者、
R:センサ、 L:観測エリア、
Claims (10)
- 対象者に携帯された記憶媒体から当該対象者の識別情報を無線通信により読み取ったセンサの観測エリアの識別情報、当該対象者の識別情報、当該検出時刻を取得する取得手段と、
前記取得手段で取得した検出時刻及び観測エリアの識別情報に基づく観測エリアにおける対象者の検出頻度から、複数のセンサの観測エリアの集合である全観測エリアにおける対象者が検出された観測エリアの偏り度合いを表すエントロピーを演算する演算手段と、
前記演算手段で演算された対象者のエントロピーと当該対象者の属する集団の平均エントロピーとの比較に基づいて、対象者の観測エリア間の移動状態を識別する識別手段と、
前記識別手段により識別された対象者の観測エリア間の移動状態を示す情報を出力する出力手段と、
を備えたことを特徴とする行動分析装置。 - 前記識別手段は、複数の対象者の観測エリア間の移動状態を分類して、当該複数の対象者からなる集団の観測エリア間の移動状態を識別することを特徴とする請求項1に記載の行動分析装置。
- 前記識別手段は、前記演算手段で演算された対象者のエントロピーから、一の観測エリアに静止して居る一の対象者と、他の観測エリアから前記一の観測エリアに移動して前記一の対象者と所定時間以上存した他の対象者とを識別することを特徴とする請求項1に記載の行動分析装置。
- 前記出力手段は、前記識別手段により識別された一の対象者と他の対象者とを、他の対象者から一の対象者へ行動方向を表す態様で可視化して出力することを特徴とする請求項3に記載の行動分析装置。
- 前記識別手段は、前記演算手段で演算された対象者のエントロピーから、特定の観測エリアに所定時間以上静止して居る対象者数を識別することを特徴とする請求項1に記載の行動分析装置。
- 前記識別手段は、前記演算手段で演算された対象者のエントロピーから、一の観測エリアに静止して居る複数の対象者を識別することを特徴とする請求項1に記載の行動分析装置。
- 前記出力手段は、前記識別手段により識別された複数の対象者間の関連付けを表す態様で可視化して出力することを特徴とする請求項6に記載の行動分析装置。
- 前記識別手段は、対象者の属性を保持する情報保持手段を参照して、対象者の属性を峻別して対象者の移動状態を識別することを特徴とする請求項1乃至請求項7のいずれか1項に記載の行動分析装置。
- 対象者に携帯された記憶媒体から当該対象者の識別情報を無線通信により読み取ったセンサの観測エリアの識別情報、当該対象者の識別情報、当該検出時刻を取得する取得機能と、
前記取得機能で取得した検出時刻及び観測エリアの識別情報に基づく観測エリアにおける対象者の検出頻度から、複数のセンサの観測エリアの集合である全観測エリアにおける対象者が検出された観測エリアの偏り度合いを表すエントロピーを演算する演算機能と、
前記演算機能で演算された対象者のエントロピーと当該対象者の属する集団の平均エントロピーとの比較に基づいて、対象者の観測エリア間の移動状態を識別する識別機能と、
前記識別機能により識別された対象者の観測エリア間の移動状態を示す情報を出力する出力機能と、
をコンピュータに実現させるための行動分析プログラム。 - 観測エリアに設置され且つ対象者が携帯する記憶媒体から無線通信により当該対象者の識別情報を読取るセンサと、
前記センサによる検出に基づいて、対象者の識別情報を読み取ったセンサの観測エリアの識別情報、当該対象者の識別情報、当該検出時刻を取得する取得手段と、
前記取得手段で取得した検出時刻及び観測エリアの識別情報に基づく観測エリアにおける対象者の検出頻度から、複数のセンサの観測エリアの集合である全観測エリアにおける対象者が検出された観測エリアの偏り度合いを表すエントロピーを演算する演算手段と、
前記演算手段で演算された対象者のエントロピーと当該対象者の属する集団の平均エントロピーとの比較に基づいて、対象者の観測エリア間の移動状態を識別する識別手段と、
前記識別手段により識別された対象者の観測エリア間の移動状態を示す情報を出力する出力手段と、
を備えたことを特徴とする行動分析システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007024545A JP5045129B2 (ja) | 2007-02-02 | 2007-02-02 | 行動分析装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007024545A JP5045129B2 (ja) | 2007-02-02 | 2007-02-02 | 行動分析装置及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008191865A JP2008191865A (ja) | 2008-08-21 |
| JP2008191865A5 JP2008191865A5 (ja) | 2010-03-11 |
| JP5045129B2 true JP5045129B2 (ja) | 2012-10-10 |
Family
ID=39751919
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007024545A Expired - Fee Related JP5045129B2 (ja) | 2007-02-02 | 2007-02-02 | 行動分析装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5045129B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5622538B2 (ja) * | 2010-11-30 | 2014-11-12 | 株式会社岡村製作所 | エリア利用状況解析システム及びエリア利用状況解析方法並びにそのプログラム |
| JP7242264B2 (ja) * | 2018-11-26 | 2023-03-20 | 株式会社イトーキ | 活動管理装置、活動管理方法及びプログラム |
| CN111385834B (zh) * | 2018-12-27 | 2023-08-18 | 深圳市大数据研究院 | 对象识别方法、装置、电子设备及计算机可读存储介质 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001344341A (ja) * | 2000-03-31 | 2001-12-14 | Sharp Corp | 生活活動度評価システムおよび体調判定方法 |
| JP2006092368A (ja) * | 2004-09-24 | 2006-04-06 | Fuji Xerox Co Ltd | 活動記録装置、活動記録方法およびプログラム |
| JP2006260341A (ja) * | 2005-03-18 | 2006-09-28 | Fuji Xerox Co Ltd | 対話行動評価装置および方法 |
-
2007
- 2007-02-02 JP JP2007024545A patent/JP5045129B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008191865A (ja) | 2008-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7017363B2 (ja) | 異常検知装置および異常検知方法 | |
| CA2924691C (en) | User activity tracking system and device | |
| US9519672B2 (en) | User activity tracking system and device | |
| CN109417680A (zh) | 监测能够进行无线通信的对象 | |
| CN110575174B (zh) | 用于活动识别和行为分析的方法和系统 | |
| JP5396537B2 (ja) | 情報処理システム、サーバ、及び情報処理方法 | |
| JP2015103018A (ja) | 行動パターン分析装置および行動パターン分析方法 | |
| CN110022529B (zh) | 基于两种传感模式的目标区域人数统计的方法和装置 | |
| JP5045129B2 (ja) | 行動分析装置及びプログラム | |
| KR20120073299A (ko) | 이동 시간 추정의 신뢰도 개선 | |
| JP2008294593A (ja) | 位置推定システム、位置推定装置及びそれらに用いる位置推定方法並びにそのプログラム | |
| Stisen et al. | Task phase recognition for highly mobile workers in large building complexes | |
| IT201600105108A1 (it) | Calcolo di analitiche sulla base di flussi di dati di localizzazione all'interno | |
| JP2005327134A (ja) | 異常検知装置及び異常検知方法 | |
| JP7198483B2 (ja) | 行動状況可視化装置 | |
| JP2018047166A (ja) | ストレスモニタシステムおよびプログラム | |
| JP7359009B2 (ja) | データ分析装置、プログラム及び方法 | |
| JP2015005103A (ja) | 同行判断装置、同行判断方法、およびプログラム | |
| JP7270604B2 (ja) | 判定装置 | |
| JP2022187052A (ja) | 行動パターン判別装置、携帯端末プログラムおよびサーバプログラム | |
| WO2021166402A1 (ja) | 行動解析装置及び行動解析方法 | |
| Niu et al. | Integrating environmental sensing and BLE-based location for improving daily activity recognition in OPH | |
| US20210048336A1 (en) | Abnormal-sound determination criterion generation device, abnormal-sound criterion generation method, abnormal-sound sensing device, and storage medium | |
| TR202014900A2 (tr) | Ziyaretçi sayımında personel istisnası sistemi ve yöntemi | |
| JP2002148349A (ja) | 位置検知システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100126 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20101118 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110505 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120619 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120702 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5045129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| LAPS | Cancellation because of no payment of annual fees | ||
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |