JP5023511B2 - Elevator equipment - Google Patents
Elevator equipment Download PDFInfo
- Publication number
- JP5023511B2 JP5023511B2 JP2006049935A JP2006049935A JP5023511B2 JP 5023511 B2 JP5023511 B2 JP 5023511B2 JP 2006049935 A JP2006049935 A JP 2006049935A JP 2006049935 A JP2006049935 A JP 2006049935A JP 5023511 B2 JP5023511 B2 JP 5023511B2
- Authority
- JP
- Japan
- Prior art keywords
- governor
- rope
- earthquake
- value
- encoder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007689 inspection Methods 0.000 claims description 23
- 230000005856 abnormality Effects 0.000 description 35
- 238000010586 diagram Methods 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000001514 detection method Methods 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images






Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
この発明は、地震発生後に実施する自動点検運転(診断運転)により、ロープの異常を診断し、ロープが引っ掛った状態で、かごを走行することにより昇降路機器が破損する二次災害を防ぐとともに、平常運転に復帰するまでの時間を短縮するエレベータ装置に関するものである。 This invention diagnoses the abnormality of the rope by the automatic inspection operation (diagnostic operation) carried out after the occurrence of the earthquake, and prevents a secondary disaster in which the hoistway equipment is damaged by running the car while the rope is caught. In addition, the present invention relates to an elevator apparatus that shortens the time required to return to normal operation.
地震が発生し、地震管制運転動作により、多くのエレベータが運転休止状態になると、エレベータの専門技術者が手動復旧する必要があり、大勢の専門技術者の手配と、多大な復旧時間を要することになる。特に、ロープが昇降路内で引っ掛っていないかどうかを判断するために、専門技術者が昇降路内に入り、昇降路の状況を目視確認しながら点検運転するため、検査に多くの時間を要する。そのため、迅速、且つ効率良く、復旧を行う必要がある。
この問題を解決するための従来技術として、エレベータのガバナロープが昇降路内に突出した突出物等に引っ掛ったことをガバナ張り車の上下変位から検出するエレベータのガバナロープの異常検出装置が知られている(例えば、特許文献1参照)。
また、他の従来技術として、エレベータのロープに振動を与える加振手段と、この加振手段で与えた振動を検出する振動検出手段と、この振動検出手段で検出した振動に基づいてロープの異常を判定する異常判定手段とを有するエレベータ装置が知られている(例えば、特許文献2参照)。
また、主ロープ、重量補償ロープ、テールコード等のような昇降機の懸垂条体に横波信号波を発信する装置を条体の一方の端の近傍に設け、懸垂条体の横波信号波を受信する装置を発信装置の近傍もしくはその条体の他方の端の近傍に設け、かごの昇降と共に変化する条体の懸垂長に対応して横波信号波発信から横波信号波受信迄の妥当な時間遅れを持って受信波が受信されることを判別する制御装置を設けた昇降機の懸垂条体の絡み検出装置が知られている(例えば、特許文献3参照)。
When an earthquake occurs and many elevators are put out of service due to seismic control operation, it is necessary for the elevator technicians to manually restore them, which requires a lot of specialist arrangements and a lot of recovery time. become. In particular, in order to determine whether or not the rope is caught in the hoistway, a specialist engineer enters the hoistway and conducts an inspection operation while visually checking the hoistway status, so a lot of time is required for the inspection. Cost. Therefore, it is necessary to perform recovery quickly and efficiently.
As a conventional technique for solving this problem, an elevator governor rope abnormality detection device that detects that an elevator governor rope is caught by a projecting object or the like protruding into a hoistway from a vertical displacement of a governor tension vehicle is known. (For example, refer to Patent Document 1).
In addition, as other conventional techniques, vibration means for applying vibration to the rope of the elevator, vibration detection means for detecting vibration applied by the vibration means, and abnormality of the rope based on the vibration detected by the vibration detection means There is known an elevator apparatus having an abnormality determining means for determining (see, for example, Patent Document 2).
In addition, a device that transmits a transverse wave signal wave to the suspended body of the elevator, such as a main rope, a weight compensation rope, and a tail cord, is provided near one end of the elongated body, and receives the transverse wave signal wave of the suspended body. Install the device near the transmitter or near the other end of the strip, and provide a reasonable time delay from the transmission of the transverse wave to the reception of the transverse wave corresponding to the suspension length of the strip that changes as the car moves up and down. An entanglement detection device for a suspended body of an elevator provided with a control device for determining whether a received wave is received is known (for example, see Patent Document 3).
特許文献1では、ガバナロープが引っ掛ることにより、ガバナ張り車が上方に引き上げられるのを検知するものであるが、ガバナロープ以外の巻上ロープや制御ケーブルなどの引っ掛りを検知できないという問題があった。
また、特許文献2、3では、対象のロープを横方向に加振し、ロープに伝わる波の状態からロープの引っ掛りの判定を行うものであるが、ロープを加振するために、大きな加振力を発生させるための加振器を、対象とする全てのロープに設置する必要があり、機器構成が大型且つ複雑のものになるという問題があった。
In Patent Document 1, it is detected that the governor-tensioned wheel is pulled upward when the governor rope is caught, but there is a problem that it is not possible to detect catching of a hoisting rope or a control cable other than the governor rope. .
In
この発明は、上述のような課題を解決するためになされたもので、地震後のガバナロープ、巻上ロープ等の状態をロープの変位量と張力変動のデータから判断するエレベータ装置を提供するものである。 The present invention has been made to solve the above-described problems, and provides an elevator apparatus that determines the state of a governor rope, a hoisting rope, and the like after an earthquake from data on a rope displacement and tension fluctuation. is there.
この発明に係るエレベータ装置においては、地震感知器が動作した時、かごを最寄階に停止させ、自動点検運転(診断運転)を行った後にエレベータを平常運転に復帰させる地震時管制運転装置において、かごに取り付けられ、かごと同期して移動するガバナロープと、ガバナロープが巻き掛けられたガバナと、ガバナに設置されたガバナエンコーダと、平常時に前記ガバナエンコーダの回転角の値を要求し、得られた平常時の回転角の値を格納する記憶装置と、地震感知器が地震を感知すると、地震後のガバナエンコーダの回転角の値を要求し、得られた地震後の回転角の値と記憶装置に格納されている平常時のガバナエンコーダの回転角の値とを比較する比較器とを備え、ガバナエンコーダの出力値を用いて、ガバナの回転角を地震前後の変動量で比較することにより、地震後にガバナエンコーダからの変動量がある一定レベルの設定値を超えていない場合はガバナロープが引っ掛っていないと判断して自動点検運転を行い、地震後にガバナエンコーダからの変動量がある一定レベルの設定値を超えている場合はガバナロープが引っ掛ったと判断して通報システムに通報するものである。
In the elevator apparatus according to the present invention, when the earthquake detector operates, the car is stopped at the nearest floor, and after the automatic inspection operation (diagnostic operation) is performed, the elevator is returned to the normal operation. A governor rope that is attached to the car and moves synchronously with the car, a governor around which the governor rope is wound, a governor encoder installed in the governor, and a value of the rotation angle of the governor encoder in a normal state. When the earthquake detector detects an earthquake, it requests the rotation angle value of the governor encoder after the earthquake, and stores the obtained rotation angle value and memory after the earthquake. Comparator that compares the rotation angle value of the governor encoder stored in the equipment with the normal value, and using the output value of the governor encoder, the rotation angle of the governor is calculated before and after the earthquake. By comparing with the amount of change, for automatic inspection operation it is determined that if not exceeded the set value of the certain level fluctuation amount from the governor encoder after the earthquake is not caught governor rope, the governor encoder after the earthquake If it exceeds a certain level settings where there is a variation amount of from is to report to the notification system determines that the governor rope caught.
この発明によれば、地震によるロープの引っ掛りを精度良く判定でき、地震後の点検運転時の二次災害を防止でき、運転再開判断を確実にするものである。更に、点検運転開始時間を早めるとともに、点検運転により異常が認められなければ、速やかに平常運転へ復帰可能となるという効果がある。 According to this invention, the hooking of the rope due to the earthquake can be determined with high accuracy, the secondary disaster at the time of the inspection operation after the earthquake can be prevented, and the operation resumption determination is ensured. In addition, the check operation start time can be shortened, and if no abnormality is recognized by the check operation, the normal operation can be quickly restored.
実施の形態1.
図1は地震時におけるエレベータのロープの横振動を示すエレベータ装置の概略図、図2は地震発生時にエレベータのロープが引っ掛った状態を示すエレベータ装置の概略図、図3はこの発明の実施の形態1におけるエレベータ装置のロープ異常判定装置を示すブロック構成図である。
Embodiment 1 FIG.
FIG. 1 is a schematic diagram of an elevator apparatus showing lateral vibration of an elevator rope during an earthquake, FIG. 2 is a schematic diagram of the elevator apparatus showing a state in which the elevator rope is hooked when an earthquake occurs, and FIG. 3 is an embodiment of the present invention. It is a block block diagram which shows the rope abnormality determination apparatus of the elevator apparatus in the form 1.
図1は地震時におけるエレベータのロープの横振動を示す。図中、1はエレベータのかご、2はつり合いおもり、3はかご1とつり合いおもり2を懸架する巻上ロープ、4は巻上ロープ3が巻き掛けられた巻上機で、かご1及びつり合いおもり2を釣瓶式に昇降させる。5はかご1の下部とつり合いおもり2の下部に連結されたつり合いロープ、6は昇降路下部に設置されたつり合い車、7はかご1に取り付けられ、かご1と同期して移動するガバナロープ、8はガバナロープ7が巻き掛けられたガバナ、9はガバナ8に設置されたガバナエンコーダである。地震時は、かご1とつり合いおもり2を駆動する巻上機4に巻き掛けられた巻上ロープ3の横振動(横変位)、かご1の下部とつり合いおもり2の下部の間に架設されてつり合い車6に巻き掛けられたつり合いロープ5の横振動(横変位)、ガバナ8に巻き掛けられたガバナロープ7の横振動(横変位)がそれぞれ発生する。また、かご1の下部には制御ケーブル(図示せず)が取り付けられており、地震時にこの制御ケーブルも横振動(横変位)を生じる。
上記のエレベータのロープ・ケーブルは、狭い昇降路内に配置されているので、地震による建物の揺れにより、横振動(横変位)を生じた場合、昇降路壁又は昇降路内に配置された機器に衝突し、引っ掛る場合がある。
一方、平常時にかご1が停止していると、ガバナロープ7は、縦方向・横方向のいずれにも動かないため、ガバナ8に設置されたガバナエンコーダ9からの出力は、回転しないため一定値を保つ。
FIG. 1 shows the lateral vibration of an elevator rope during an earthquake. In the figure, 1 is an elevator car, 2 is a counterweight, 3 is a hoisting rope that suspends a
The above elevator rope cable is located in a narrow hoistway, so if a horizontal vibration (lateral displacement) occurs due to the shaking of the building due to an earthquake, the equipment is placed in the hoistway wall or hoistway May collide and get caught.
On the other hand, when the car 1 is stopped at normal times, the governor rope 7 does not move in either the vertical direction or the horizontal direction. Therefore, the output from the
図2は地震発生によりガバナロープ7が昇降路機器10に引っ掛った状態を示す。この場合、地震後にロープの揺れが収まり、かご1が静止しているにも関わらず、ガバナロープ7が昇降路機器10に引っ掛ると、ガバナ8は、引っ掛りによるガバナロープ7の延び量を補正するために、引っ掛ったロープ側に回転し、ガバナエンコーダ9の出力値が地震前とは変化する。すなわち、平常時と地震後の変動量がロープ異常の判定基準となる。ガバナロープ7が引っ掛った図2の状態で、点検運転を実施すると、昇降路機器10に過大な力が生じて変位し、昇降路機器10或いはガバナロープ7に損傷が発生する。そのため、ガバナ8に設置したガバナエンコーダ9を用いて、ガバナ8の回転角を地震前後の値(変動量)で比較することにより、地震後にガバナエンコーダ9からの変動値が、ある一定レベルの設定値を超えている場合は、ガバナロープ7が引っ掛ったと判断することができる。
FIG. 2 shows a state where the governor rope 7 is caught by the
図3はガバナロープ異常判定装置を示すブロック構成図である。図中、9はガバナエンコーダ、20はかご停止信号、21はトリガー、22は記憶装置、23は地震感知器、24はトリガー、25は比較器、26は判定装置、27は通報システム、28は自動点検運転モードである。
かごが目的階に停止すると、エレベータ制御盤(図示せず)は、かご停止信号20をトリガー21に出力する。かご停止信号20により、トリガー21はガバナ8に取り付けられたガバナエンコーダ9に対し、現在の回転角の値を出力するように要求する。得られたガバナエンコーダ9の回転角の値は、記憶装置22に格納される。もし、地震が発生しなければ、エレベータ装置は上記の動作を平常運転中繰り返す。
地震が発生し、地震の発生を地震感知器23が感知すると、地震感知器23は、トリガー24に動作信号を送る。トリガー24は、ガバナエンコーダ9に対し、信号を送るように要求する。送られてきたガバナエンコーダ9の信号を、トリガー24は微分器(図示せず)で微分し、微分値が0、すなわちエンコーダ信号の変動が無くなるまで、ガバナエンコーダ9の状態を監視する。地震後のロープ揺れが収まったことを、上記の微分器で確認すると、トリガー24は、現在のエンコーダ値を比較器25に出力する。比較器25は、地震発生前のエンコーダ出力値と、地震後の出力値を比較し、その差分値(変動量)を判定装置26に送る。判定装置26は、ある一定レベルの設定値を超えていれば、ガバナロープが引っ掛ったものと判断し、通報システム27に結果を送り、専門技術者による復旧作業までエレベータ装置を休止させる。一方、比較器25からの出力が、ある一定レベルの設定値を下回っていれば、ガバナロープの引っ掛りは無いものと判断し、自動点検運転を行うように自動点検運転モード28に通知する。
FIG. 3 is a block diagram showing a governor rope abnormality determination device. In the figure, 9 is a governor encoder, 20 is a car stop signal, 21 is a trigger, 22 is a storage device, 23 is a seismic detector, 24 is a trigger, 25 is a comparator, 26 is a judgment device, 27 is a notification system, 28 is Automatic inspection operation mode.
When the car stops at the destination floor, the elevator control panel (not shown) outputs a
When an earthquake occurs and the
以上の動作では、ガバナロープ7の揺れが収まったことを確認した後に、点検運転を開始するため、ガバナロープ7が揺れている状態で点検運転を行い、ガバナロープ7の揺れによる昇降路機器10との接触で生じる二次災害を防ぐことができる。また、点検運転を開始する前に、ガバナロープの引っ掛り判定を実施しているため、ガバナロープが引っ掛っていない状態で点検運転を行い、ロープ引っ掛り状態での走行による二次災害を防ぐことができる。
In the above operation, in order to start the inspection operation after confirming that the governor rope 7 has stopped shaking, the inspection operation is performed while the governor rope 7 is shaking, and contact with the
なお、上記の説明では、ガバナロープ7のみに着目して説明を行ったが、巻上ロープ3が昇降路機器等に引っ掛ることにより、かご位置が変動することから、同様に巻上ロープ3の引っ掛りをガバナエンコーダ9の出力から判定することができる。更にまた、図3のガバナエンコーダ9の代わりに、ロープ張力の変動を計測可能な秤装置の信号を用いても、巻上ロープやつり合いロープの引っ掛りによりかごが受ける張力変化を捉えることができ、これによっても、同様の効果が得られる。
In the above description, only the governor rope 7 has been described. However, since the position of the car fluctuates due to the hoisting
実施の形態2.
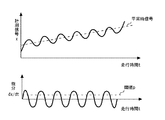
図4は点検運転中における従来のロープ異常検出装置によるロープ異常判定を示すブロック図、図5はこの発明の実施の形態2におけるエレベータ装置のロープ異常判定装置によるロープ異常判定を示すブロック図、図6はこの発明の実施の形態2におけるロープ異常判定装置のトルク電流の信号波形とその微分値を示す特性図である。
4 is a block diagram showing a rope abnormality determination by a conventional rope abnormality detection device during inspection operation, and FIG. 5 is a block diagram showing a rope abnormality determination by a rope abnormality determination device of an elevator apparatus according to
図4は点検運転中における、従来のロープ異常検出装置によるロープ異常判定手段を示す。ロープの異常検知手段として、例えば巻上機のトルク電流を用いた場合、得られる計測信号31と、予め記憶装置に保存しておいた平常時の平常時信号32を、比較器33に入力し、得られた差分値が、ある一定レベル値以上であれば、判定装置34により、ロープ異常と判断する。しかしながら、平常時信号32は、温度変化や運転年数などの環境変動の影響を排除するために、定期的に値を更新する必要があり、またかご位置によってもその値が変化するため、多くの記憶容量を必要とする。
そこで、この発明の実施の形態2においては、温度変化や運転年数などの環境変動の影響を受け易い平常時信号32を用いないで、ロープ異常を判定するものである。図6はロープ異常判定装置のトルク電流の信号波形とその微分値を示す。点検運転により、かごが上下方向に走行すると、ロープに異常がなければ、破線で示すように、走行時間tとともに計測信号xは滑らかに値が変化する。一方、ロープに引っ掛りなどの異常が発生していれば、実線で示すような変動成分が重畳される。正常時のトルク電流の変動は、異常信号に比べて、非常にゆっくりしたものであることから、計測信号31を微分することにより、異常振動成分のみを取り出すことができる。したがって、閾値Pを設定することにより、ロープ異常を判断することが可能となる。
図5は平常時信号を用いない、この発明によるロープ異常判定装置によるロープ異常判定を示す。すなわち、得られた計測信号31を、微分器35に通すことにより、異常振動成分のみを抽出し、判定装置34により、閾値Pを超えていれば、ロープ異常と判定するものである。
FIG. 4 shows a rope abnormality determination means by a conventional rope abnormality detection device during an inspection operation. For example, when the hoisting machine torque current is used as the rope abnormality detection means, the obtained
Therefore, in the second embodiment of the present invention, the rope abnormality is determined without using the
FIG. 5 shows a rope abnormality determination by the rope abnormality determination device according to the present invention which does not use a normal signal. That is, by passing the obtained
以上の構成により、大容量の記憶装置や、定期的な平常時信号を取得するための特別な運転を必要とせず、簡潔な構成でロープの異常検知を行うことができる。 With the above configuration, it is possible to detect a rope abnormality with a simple configuration without requiring a large capacity storage device or a special operation for obtaining a regular normal signal.
なお、上記の説明では、計測信号としてトルク電流を用いたが、秤信号、かごの振動・騒音データを用いても同様の効果が得られる。 In the above description, torque current is used as a measurement signal, but the same effect can be obtained by using a scale signal and car vibration / noise data.
実施の形態3.
図7はこの発明の実施の形態3におけるエレベータ装置のロープ異常判定装置を示すブロック構成図である。
FIG. 7 is a block diagram showing a rope abnormality determination device for an elevator apparatus according to
図7は点検運転実施中において、巻上ロープとガバナロープの引っ掛りを同時に判断できるロープ異常判定装置を示すブロック構成図である。図中、9はガバナエンコーダ、40は巻上機4に設置した巻上機エンコーダ、41は巻上機エンコーダ40の出力から得られる第1のかご位置換算装置、42はガバナエンコーダ9の出力から得られる第2のかご位置換算装置、43は第1のかご位置換算装置41から得られたかご位置情報と第2のかご位置換算装置42から得られたかご位置情報を比較する比較器、44は判定装置、45は通報システム、46は平常運転モードである。
点検運転実施中に、巻上機4に設置した巻上機エンコーダ40からの出力を用いて、第1のかご位置換算装置41により、第1のかご位置情報を得る。これと同時に、ガバナ8に設置したガバナエンコーダ9からの出力を用いて、第2のかご位置換算装置42により、第2のかご位置情報を得る。第1のかご位置換算装置41から得られたかご位置情報と、第2のかご位置換算装置42から得られたかご位置情報は、比較器43に送られ、巻上ロープ3とガバナロープ7を介したかご位置として、その値を比較し、差分値を判定装置44に送る。
もし、ガバナロープ7が昇降路機器10に引っ掛りながら点検走行をしていると、ガバナロープ7からのかご位置情報と、巻上ロープ3からの正常なかご位置情報との間に偏差が生じる。そのため、判定装置44は、ある一定レベルの偏差値を超えていれば、ガバナロープ7が引っ掛ったものと判断し、通報システム45に結果を送り、専門技術者による復旧作業までエレベータ装置を休止させる。同様に巻上ロープ3が引っ掛っていた場合も、正常なガバナロープ側のかご位置情報との比較により、引っ掛りを判断できる。また、巻上ロープ3とガバナロープ7が同時に引っ掛っている場合においても、それぞれのかご位置情報の変動する割合が異なるために、偏差を取ることにより、ロープ異常を判断することが可能となる。一方、比較器43からの出力が、設定値を下回っていれば、ロープの引っ掛りは無いものと判断し、平常運転に復帰するように平常運転モード46に通知する。
FIG. 7 is a block diagram illustrating a rope abnormality determination device that can simultaneously determine whether the hoisting rope and the governor rope are caught during the inspection operation. In the figure, 9 is a governor encoder, 40 is a hoisting machine encoder installed in the hoisting
During the inspection operation, the first car
If the governor rope 7 is traveling while being caught by the
以上の動作では、点検運転中に、巻上ロープもしくはガバナロープの異常を、参照用の平常時信号を準備することなく、簡単な構成で容易に判定でき、ロープの引っ掛りによる昇降路機器やロープに対する二次災害を防ぐことができる。 With the above operation, during inspection operation, abnormalities in the hoisting rope or governor rope can be easily judged with a simple configuration without preparing a normal signal for reference. Secondary disaster can be prevented.
なお、上記の説明では、比較信号としてかご位置情報を用いたが、かご速度情報を用いても同様の効果が得られる。 In the above description, the car position information is used as the comparison signal, but the same effect can be obtained by using the car speed information.
1 エレベータのかご
2 つり合いおもり
3 巻上ロープ
4 巻上機
5 つり合いロープ
6 つり合い車
7 ガバナロープ
8 ガバナ
9 ガバナエンコーダ
10 昇降路機器
20 かご停止信号
21、24 トリガー
22 記憶装置
23 地震感知器
25、33、43 比較器
26、34、44 判定装置
27、45 通報システム
28 自動点検運転モード
31 計測信号
32 平常時信号
35 微分器
40 巻上機エンコーダ
41 第1のかご位置換算装置
42 第2のかご位置換算装置
46 平常運転モード
DESCRIPTION OF SYMBOLS 1
Claims (2)
かごに取り付けられ、かごと同期して移動するガバナロープと、前記ガバナロープが巻き掛けられたガバナと、前記ガバナに設置されたガバナエンコーダと、平常時に前記ガバナエンコーダの回転角の値を要求し、得られた平常時の回転角の値を格納する記憶装置と、前記地震感知器が地震を感知すると、地震後の前記ガバナエンコーダの回転角の値を要求し、得られた地震後の回転角の値と前記記憶装置に格納されている平常時のガバナエンコーダの回転角の値とを比較する比較器とを備え、
前記ガバナエンコーダの出力値を用いて、前記ガバナの回転角を地震前後の変動量で比較することにより、地震後に前記ガバナエンコーダからの変動量がある一定レベルの設定値を超えていない場合は前記ガバナロープが引っ掛っていないと判断して自動点検運転を行い、地震後に前記ガバナエンコーダからの変動量がある一定レベルの設定値を超えている場合は前記ガバナロープが引っ掛ったと判断して通報システムに通報することを特徴とするエレベータ装置。 When the seismic detector is activated, the car is stopped at the nearest floor, and after the automatic inspection operation (diagnostic operation), the elevator is returned to normal operation, and the elevator is controlled during earthquakes.
A governor rope that is attached to a car and moves synchronously with the car, a governor around which the governor rope is wound, a governor encoder installed in the governor, and a value of the rotation angle of the governor encoder are normally obtained and obtained. When the seismic detector senses an earthquake, the storage device that stores the obtained normal rotation angle value requests the rotation angle value of the governor encoder after the earthquake, and the obtained post-earthquake rotation angle value is obtained. A comparator for comparing the value and the value of the rotation angle of the normal governor encoder stored in the storage device,
Using the output value of the governor encoder, by the rotation angle of the governor compared with the amount of change before and after the earthquake, if it does not exceed the set value of the certain level fluctuation amount from the governor encoder after the earthquake the for automatic inspection operation determines that the governor rope is not caught, report if it exceeds the set value of the certain level fluctuation amount from the governor encoder after the earthquake is determined that the governor rope is caught An elevator apparatus characterized by notifying the system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006049935A JP5023511B2 (en) | 2006-02-27 | 2006-02-27 | Elevator equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006049935A JP5023511B2 (en) | 2006-02-27 | 2006-02-27 | Elevator equipment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007223785A JP2007223785A (en) | 2007-09-06 |
| JP2007223785A5 JP2007223785A5 (en) | 2008-05-08 |
| JP5023511B2 true JP5023511B2 (en) | 2012-09-12 |
Family
ID=38545947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006049935A Active JP5023511B2 (en) | 2006-02-27 | 2006-02-27 | Elevator equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5023511B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012056698A (en) * | 2010-09-08 | 2012-03-22 | Toshiba Elevator Co Ltd | Elevator control device |
| WO2020031284A1 (en) * | 2018-08-08 | 2020-02-13 | 株式会社日立ビルシステム | Elevator diagnosis system |
| WO2020070795A1 (en) * | 2018-10-02 | 2020-04-09 | 三菱電機株式会社 | Governor system characteristics control device and elevator device |
| JP6744453B1 (en) * | 2019-05-09 | 2020-08-19 | 東芝エレベータ株式会社 | Abnormality diagnosis system |
| CN116963984B (en) * | 2021-03-12 | 2024-06-07 | 三菱电机楼宇解决方案株式会社 | Elevator device |
| CN117105039B (en) * | 2023-10-23 | 2024-01-23 | 菱王电梯有限公司 | Method, system, elevator, equipment and medium for detecting elevator wire rope |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0684233B2 (en) * | 1986-03-05 | 1994-10-26 | 株式会社日立製作所 | Elevator device and operation control method thereof |
| JPH10120327A (en) * | 1996-10-23 | 1998-05-12 | Toshiba Elevator Technos Kk | Abnormality detection device for elevator governor rope |
| JPH1179595A (en) * | 1997-09-09 | 1999-03-23 | Hitachi Ltd | Earthquake control operation device of elevator |
| JPH1179589A (en) * | 1997-09-11 | 1999-03-23 | Mitsubishi Denki Bill Techno Service Kk | Abnormality detecting device of main rope of elevator |
| JPH11171423A (en) * | 1997-12-15 | 1999-06-29 | Hitachi Ltd | Automatic earthquake-return mechanism for elevator |
-
2006
- 2006-02-27 JP JP2006049935A patent/JP5023511B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007223785A (en) | 2007-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4659482B2 (en) | Elevator earthquake automatic return device | |
| JP5224933B2 (en) | Elevator restoration operation method and apparatus | |
| JP5023511B2 (en) | Elevator equipment | |
| JP4849397B2 (en) | Elevator abnormality detection device | |
| JP5120811B2 (en) | Elevator control device | |
| JP4675390B2 (en) | Elevator earthquake recovery equipment | |
| JP5135858B2 (en) | Elevator diagnostic operation apparatus and diagnostic operation method | |
| JP4488216B2 (en) | Elevator control device | |
| JP6987255B2 (en) | Elevator diagnostic system | |
| JP5399879B2 (en) | Elevator control device | |
| JP5079351B2 (en) | Elevator equipment | |
| JP4750570B2 (en) | Elevator control operation device and control operation method | |
| JP5287316B2 (en) | Elevator equipment | |
| JP5082803B2 (en) | Elevator control device and control method, and repair method for existing elevator | |
| WO2018134891A1 (en) | Elevator automatic recovery system | |
| JP4872361B2 (en) | Elevator abnormality detection device | |
| JP2009298546A (en) | Control system for elevator | |
| JP7042184B2 (en) | Elevator, elevator maintenance and inspection system and elevator abnormality diagnostic device | |
| JP4844410B2 (en) | Hook detection device for elevator ropes | |
| JP2010070298A (en) | Emergency operation device for elevator | |
| JP4867813B2 (en) | Elevator seismic control operation system | |
| JP5706781B2 (en) | Elevator earthquake recovery diagnosis operation device | |
| JP2008247492A (en) | Device and method for diagnosing operation of elevator | |
| JP2008094604A (en) | Control device of elevator | |
| JPH1017232A (en) | Earthquake sensing device of elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120522 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120604 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150629 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5023511 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |