第1実施形態に係る撮像装置の構成及び動作を、図1を用いて説明する。図1は、第1実施形態に係る撮像装置の構成図である。
撮像装置100は、レンズ群(集光手段)1、モータ2、ズーム検出部(ズーム量検出手段)3、ズーム機構駆動制御部4、絞り(絞り機構)5、モータユニット6、絞り検出部7及び絞り機構駆動制御部8を備える。撮像装置100は、ND(Neutral Density)フィルター9、モータユニット10、NDフィルター検出部11、NDフィルター駆動制御部12、固体撮像素子(第1の検出手段)13及び撮像素子駆動回路14を備える。撮像装置100は、CDS(Correlated Double Sampling:相関二重サンプリング)/AGC(Auto Gain Control:自動利得調整)回路15及びAGC制御回路16である。撮像装置100は、A/D変換器17、デジタル信号処理回路18、マイクロコンピュータ(自動露出制御手段)19、測光センサー(第2の検出手段)20及び内部センサー輝度変化量検出回路(内側輝度変化量検出手段)21を備える。撮像装置100は、外部センサー輝度変化量検出回路(周辺輝度変化量検出手段)22及び第1タイマカウンタ25を備える。撮像装置100は、第2タイマカウンタ26、露出固定制御回路(露出固定制御手段)27及び露出固定解除回路(露出固定解除手段)28を備える。
レンズ群1は、被写体(例えば、図3に示す主被写体O1)と固体撮像素子13との間に設けられ、被写体の光学像を固体撮像素子13に結像させる。レンズ群1は、複数のレンズ(簡略化のため1枚で図示)を含む。レンズ群1では、複数のレンズの間隔が変えられて固体撮像素子13に結像される被写体の光学像の大きさ(像高)が変えられ、ズーム動作が行われる。
モータ2は、間隔を変えるようにレンズ群1の各レンズを駆動して、レンズ群1にズーム動作を行わせる。
ズーム検出部3は、少なくともその一部がレンズ群1の近くに配置され、レンズ群1の各レンズの位置を検出する。すなわち、ズーム検出部3は、レンズ群1における各レンズの間隔を検出して、ズーム状態を検出する。ズーム検出部3は、ズーム状態の情報をマイクロコンピュータ19へ供給する。
ズーム機構駆動制御部4は、マイクロコンピュータ19から受け取った制御信号に基づき、モータ2へ電力を供給して、モータ2を駆動制御する。
絞り5は、レンズ群1と固体撮像素子13との間に配置される。これにより、絞り5は、所定の開度に駆動されて、レンズ群1から固体撮像素子13へ導かれる光の量を制限する。
モータユニット6は、絞り5を所定の開度になるように駆動させて、絞り5が制限する光の量を変える。
絞り検出部7は、少なくともその一部が絞り5の近くに配置され、絞り5の駆動状態(開度)を検出する。絞り検出部7は、絞り5の駆動状態の情報をマイクロコンピュータ19へ供給する。
絞り機構駆動制御部8は、マイクロコンピュータ19から受け取った制御信号に基づき、モータユニット6へ電力を供給して、モータユニット6を駆動制御する。
NDフィルター9は、絞り5と固体撮像素子13との間に配置される。これにより、NDフィルター9は、絞り5を通過した後の光の量を制限し、レンズ群1から固体撮像素子13へ導かれる光の量をさらに制限する。
モータユニット10は、NDフィルター9を駆動させて、NDフィルター9が制限する光の量を変える。
NDフィルター検出部11は、少なくともその一部がNDフィルター9の近くに配置され、NDフィルター9の駆動状態を検出する。NDフィルター検出部11は、NDフィルター9の駆動状態の情報をマイクロコンピュータ19へ供給する。
NDフィルター駆動制御部12は、マイクロコンピュータ19から受け取った制御信号に基づき、モータユニット10へ電力を供給して、モータユニット10を駆動制御する。
なお、NDフィルター9、NDフィルター検出部11及びNDフィルター駆動制御部12が省略されるとともに、NDフィルター9が制限すべき光の量を絞り5がさらに制限するようになっていても良い。
固体撮像素子13は、光電変換機能を有する素子であり、(図示しない筐体)内部に設けられたセンサー(内測センサー)である。固体撮像素子13は、結像された光学像に応じた電荷を電気信号(アナログ信号)に変換する。ここで、固体撮像素子13は、例えば、CCDやCMOSセンサーである。
撮像素子駆動回路14は、マイクロコンピュータ19及びCDS/AGC回路15に接続されている。これにより、撮像素子駆動回路14は、マイクロコンピュータ19から受け取った制御信号に基づき、固体撮像素子13を駆動する。具体的には、撮像素子駆動回路14は、固体撮像素子13を駆動するための駆動パルス等を生成及び供給する。これにより、撮像素子駆動回路14は、例えば、撮像機能や電子シャッター機能に応じた動作を固体撮像素子13に行わせる。
CDS/AGC回路15は、固体撮像素子13に接続され、固体撮像素子13から電気信号(アナログ信号)を受け取る。CDS/AGC回路15は、電気信号(アナログ信号)に対してCDS処理を行い、CDS処理後の信号をAGC動作により増幅する。
AGC制御回路16は、マイクロコンピュータ19及びCDS/AGC回路15に接続されている。これにより、AGC制御回路16は、マイクロコンピュータ19から受け取った制御信号に基づき、CDS/AGC回路15のAGC動作を制御する。具体的には、AGC制御回路16は、AGC動作を制御する信号をCDS/AGC回路15へ供給する。
A/D変換器17は、CDS/AGC回路15に接続され、増幅後のアナログ信号をCDS/AGC回路15から受け取り、アナログ信号をデジタルデータ(デジタル信号)に変換する。
デジタル信号処理回路18は、A/D変換器17及びマイクロコンピュータ19に接続されている。これにより、デジタル信号処理回路18は、デジタルデータをA/D変換器17から受け取り、マイクロコンピュータ19から受け取った制御信号に基づき、デジタルデータを処理する。デジタル信号処理回路18は、例えば、デジタルデータから(被写体を含む画像の)輝度成分を抽出する。デジタル信号処理回路18は、処理後のデジタルデータをマイクロコンピュータ19へ供給する。
マイクロコンピュータ19は、デジタル信号処理回路18から受け取ったデジタルデータを用いて、統合的な処理を行なう。マイクロコンピュータ19は、例えば、通常時において、デジタル信号処理回路18が抽出した輝度成分に基づき、(被写体を含む撮影範囲の)適正輝度(適正な露出値)を求める。マイクロコンピュータ19は、この適正輝度(適正な露出値)に基づいて、絞り機構駆動制御部8、NDフィルター駆動制御部12、AGC制御回路16、及び撮像素子駆動回路14(の電子シャッター機能)を制御する。これにより、適正な露出値の画像信号が得られる。このように、マイクロコンピュータ19は、固体撮像素子13が検出した輝度(例えば、撮影範囲の平均輝度)に基づいて、露出値を制御する。すなわち、マイクロコンピュータ19は、自動露出制御を行う。
測光センサー20は、固体撮像素子13と別に、(図示しない筐体)外部においてレンズ群1付近に設けられたセンサー(外測センサー)である。測光センサー20は、固体撮像素子13と別に(レンズ群1を通過せずに)、絞り5やNDフィルター9に光量が制限されない状態で測光(輝度の検出)を行なう。測光センサー20は、検出した輝度の情報をマイクロコンピュータ19へ供給する。
内部センサー輝度変化量検出回路21は、マイクロコンピュータ19に接続され、露出固定制御が開始されたこと示す情報とデジタルデータとをマイクロコンピュータ19から受け取る。内部センサー輝度変化量検出回路21は、露出固定制御が開始された後に、固体撮像素子13が検出した輝度の変化量を検出する。すなわち、内部センサー輝度変化量検出回路21は、露出固定制御が開始された後に、デジタルデータが示す画像における単位時間当たりの輝度の変化量(内側輝度変化量)を検出する。
外部センサー輝度変化量検出回路22は、マイクロコンピュータ19に接続され、測光センサー20が検出した輝度信号を受け取る。外部センサー輝度変化量検出回路22は、測光センサー20が検出した輝度の変化量を検出する。すなわち、外部センサー輝度変化量検出回路22は、受け取った輝度信号に基づいて、単位時間当たりの輝度の変化量(周辺輝度変化量)を検出する。
第1タイマカウンタ25は、マイクロコンピュータ19に接続され、露出固定制御が開始されたこと示す情報をマイクロコンピュータ19から受け取る。第1タイマカウンタ25は、露出固定制御が開始されたことに応じて、第1時間が設定されるとともに、露出固定時間をカウントし始める。第1タイマカウンタ25は、露出固定時間が第1時間に達したら、第1時間が経過した旨の情報をマイクロコンピュータ19へ出力する。
なお、第1時間は、予め経験的な値として決められた値でもよいし、リアルタイムに演算して求められた値であってもよい。
第2タイマカウンタ26は、マイクロコンピュータ19に接続され、第1時間が経過した旨の情報と、内側輝度変化量の情報とをマイクロコンピュータ19から受け取る。第2タイマカウンタ26は、第1時間が経過した旨の情報と、内側輝度変化量の情報とに基づき、第1時間以内に内側輝度変化量が内側閾値以上であるか否かを判断する。第2タイマカウンタ26は、第1時間以内に内側輝度変化量が内側閾値以上であると判断した場合、第2時間が設定されるとともに、固定継続時間をカウントし始める。第2タイマカウンタ26は、固定継続時間が第2時間に達したら、第2時間が経過した旨の情報をマイクロコンピュータ19へ出力する。すなわち、第2タイマカウンタ26は、露出が固定されてから第1時間+第2時間(一定時間)が経過した旨の情報をマイクロコンピュータ19へ出力する。
なお、第2時間は、予め経験的な値として決められた値でもよいし、リアルタイムに演算して求められた値であってもよい。
露出固定制御回路27は、マイクロコンピュータ19に接続され、周辺輝度変化量の情報と、露出の制御状態に関する情報とをマイクロコンピュータ19から受け取る。露出固定制御回路27は、露出の制御が自動露出制御になっている状態において、外部センサー輝度変化量検出回路22が周辺閾値以上の周辺輝度変化量を検出したと判断した場合に、露出の制御を自動露出制御から露出固定(AEロック)制御へと切り替える。露出固定制御回路27は、(固定された露出値の情報を含む)露出固定制御が開始されたこと示す情報をマイクロコンピュータ19へ供給する。これにより、マイクロコンピュータ19は、固定された露出値に基づいて、絞り機構駆動制御部8、NDフィルター駆動制御部12、AGC制御回路16、及び撮像素子駆動回路14(の電子シャッター機能)を制御する。これにより、固定された露出値の画像信号が得られる。このように、マイクロコンピュータ19は、固体撮像素子13が検出した輝度に関わらず、露出値を固定する。すなわち、露出固定制御回路27は、マイクロコンピュータ19を介して露出固定制御を行う。
露出固定解除回路28は、マイクロコンピュータ19に接続され、内側輝度変化量が内側閾値以上である旨の情報、又は第2時間が経過した旨の情報をマイクロコンピュータ19から受け取る。露出固定解除回路28は、内側輝度変化量が内側閾値以上である旨の情報に基づいて、または、露出固定制御が開始されてから第1時間+第2時間が経過したと判断したことに基づいて、露出固定制御を解除する。
なお、内部センサー輝度変化量検出回路21、外部センサー輝度変化量検出回路22、第1タイマカウンタ25及び第2タイマカウンタ26は、少なくとも1つがマイクロコンピュータ19内に存在しても構わない。
次に、第1実施形態における撮像装置の露出制御方法について、図2〜図6を用いて説明を行う。図2は、撮像装置が露出を制御する処理の流れを示すフローチャートである。図3及び図4は、輝度を検出する対象領域を示す図である。図5及び図6は、輝度の時間的変化を示す図である。
ステップS101(第1測光ステップ)では、撮像装置100が、電源投入を指示する情報を受け付ける。撮像装置100は、電源投入を指示する情報に基づき、初期設定等の所定の動作を行う。
すなわち、レンズ群1は、被写体(例えば、図3に示す主被写体O1)の光学像を固体撮像素子13に結像させる。固体撮像素子13は、結像された光学像に応じた電荷を電気信号(アナログ信号)に変換する。CDS/AGC回路15は、固体撮像素子13から電気信号(アナログ信号)を受け取る。CDS/AGC回路15は、電気信号(アナログ信号)に対してCDS処理を行い、CDS処理後の信号をAGC動作により増幅する。A/D変換器17は、増幅後のアナログ信号をCDS/AGC回路15から受け取り、アナログ信号をデジタルデータ(デジタル信号)に変換する。デジタル信号処理回路18は、デジタルデータをA/D変換器17から受け取り、マイクロコンピュータ19から受け取った制御信号に基づき、デジタルデータを処理する。デジタル信号処理回路18は、例えば、デジタルデータから(被写体を含む撮影範囲の)輝度成分を抽出する。デジタル信号処理回路18は、処理後のデジタルデータをマイクロコンピュータ19へ供給する。
ステップS102では、撮像装置100が、自動露出制御を開始する。
すなわち、マイクロコンピュータ19は、デジタル信号処理回路18から受け取ったデジタルデータを用いて、統合的な処理を行なう。マイクロコンピュータ19は、例えば、通常時において、デジタル信号処理回路18が抽出した輝度成分に基づき、(被写体を含む撮影範囲の)適正輝度(適正な露出値)を求める。マイクロコンピュータ19は、この適正輝度(適正な露出値)に基づいて、絞り機構駆動制御部8、NDフィルター駆動制御部12、AGC制御回路16、及び撮像素子駆動回路14(の電子シャッター機能)を制御する。これにより、適正な露出値の画像信号が得られる。このように、マイクロコンピュータ19は、固体撮像素子13が検出した輝度(例えば、撮影範囲の平均輝度)に基づいて、露出値を制御する。すなわち、マイクロコンピュータ19は、自動露出制御を行う。
ステップS103(第2測光ステップ)では、測光センサー20が、測光(輝度の検出)を行なう。測光センサー20は、検出した輝度の情報をマイクロコンピュータ19へ供給する。
外部センサー輝度変化量検出回路22は、マイクロコンピュータ19に接続され、測光センサー20が検出した輝度信号を受け取る。外部センサー輝度変化量検出回路22は、測光センサー20が検出した輝度の変化量を検出する。すなわち、外部センサー輝度変化量検出回路22は、受け取った輝度信号に基づいて、単位時間当たりの輝度の変化量(周辺輝度変化量)を検出する。
例えば、図3に示すように、太線で囲まれた第1の領域DA1に対して固体撮像素子13が輝度を検出し、細線で囲まれた第2の領域DA2に対して測光センサー20が輝度を検出する。ここで、第1の領域DA1は、撮影範囲に対応している。第2の領域DA2は、第1の領域DA1を含むとともに、第1の領域DA1より広い領域となっている。すなわち、固体撮像素子13から見た場合に、第2の領域DA2の画角は、第1の領域DA1の画角よりも大きい。また、測光センサー20が固体撮像素子13よりも被写体(主被写体O1)の近くに設けられているので(図1参照)、測光センサー20から見た第2の領域DA2の画角は、固体撮像素子13から見た第1の領域DA1の画角より大きい。図3に破線で示すように、第1の領域DA1は、複数の分割エリアDA23〜DAn−1m−2を含む。固体撮像素子13は、分割エリアDA23〜DAn−1m−2のそれぞれの輝度を検出する。第2の領域DA2は、複数の分割エリアDA11〜DAnmを含む。測光センサー20は、分割エリアDA11〜DAnmのそれぞれの輝度を検出する。
例えば、図3に破線で示すように、撮影周辺範囲PAは、複数の分割エリアDA11〜DA1m,DA21〜DAn−12,DA2m−1〜DAn−1m,DAn1〜DAnmを含む。撮影周辺範囲PAは、第1の領域DA1を囲んでおり、第2の領域DA2から第1の領域DA1を除いた範囲である。外部センサー輝度変化量検出回路22は、測光センサー20が検出した結果(各分割エリアDA11〜DAnmの輝度値)に基づいて、各分割エリアDA11〜DAnmの周辺輝度変化量を検出する。周辺輝度変化量は、撮影周辺範囲PAの一部の領域(分割エリアDA11〜DAnm)における輝度変化量である。
電源投入からの経過時間(以下、経過時間とする)がT1以下(図6参照)のとき、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第1の領域DA1にも第2の領域DA2にも存在していない状態になっている。主被写体O1は、撮影対象の被写体である。移動被写体O2は、主被写体O1と別の被写体であって(撮影対象でない被写体であって)、主被写体O1と輝度の大きく異なる被写体である。このとき、図6に示すように、測光センサー20が検出する所定の分割エリア(例えば、分割エリアDAn−1m)の輝度がB21である。経過時間がT1以上T2以下のとき、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第2の領域DA2だけ(撮影周辺範囲PAだけ)に侵入している状態になる(図3参照)。これにより、例えば、経過時間がT3のとき、測光センサー20が検出する所定の分割エリア(例えば、分割エリアDAn−1m)の輝度がB23に低下するので、外部センサー輝度変化量検出回路22は、周辺輝度変化量として
ΔB213=(B21−B23)/(T3−T1)・・・数式1
を検出する。経過時間がT2以上のとき、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第2の領域DA2及び第1の領域DA1に(撮影範囲に)侵入している状態になる(図4参照)。これにより、例えば、経過時間がT4のとき、測光センサー20が検出する所定の分割エリア(例えば、分割エリアDAn−1m)の輝度がB24に低下するので、外部センサー輝度変化量検出回路22は、周辺輝度変化量として
ΔB224=(B22−B24)/(T4−T2)・・・数式2
を検出する。
露出固定制御回路27は、各分割エリアの周辺輝度変化量の情報と、露出の制御状態に関する情報とをマイクロコンピュータ19から受け取る。露出固定制御回路27は、各分割エリアの周辺輝度変化量の情報と、露出の制御状態に関する情報とに基づき、少なくとも1つの分割エリアの周辺輝度変化量が周辺閾値以上であるか否かを判断する。
露出固定制御回路27は、少なくとも1つの分割エリアの周辺輝度変化量が周辺閾値以上であると判断した場合、処理をステップS104へ進める。露出固定制御回路27は、少なくとも1つの分割エリアの周辺輝度変化量が周辺閾値以上でないと判断した場合、処理をステップS102へ進める。
ステップS104(露出固定ステップ)では、露出固定制御回路27が、露出の制御を自動露出制御から露出固定(AEロック)制御へと切り替える。露出固定制御回路27は、露出固定制御を開始する。露出固定制御回路27は、露出固定制御が開始されたこと示す情報をマイクロコンピュータ19へ供給する。マイクロコンピュータ19は、露出固定制御が開始されたことを示す情報に従って、絞り機構駆動制御部8、NDフィルター駆動制御部12、AGC制御回路16、及び撮像素子駆動回路14(の電子シャッター機能)を制御する。
例えば、露出固定制御回路27は、所定の分割エリアの周辺輝度変化量ΔB213(数式1参照)が周辺閾値以上であるので、固体撮像素子13が取得する画像の輝度を不安定にさせる移動被写体O2が第1の領域DA1に侵入する可能性があると予測する。そして、露出固定制御回路27は、移動被写体O2が第1の領域DA1に侵入することにより、第1の領域DA1の輝度変化が起こると予測する。これにより、露出固定制御回路27は、露出の制御を自動露出制御から露出固定(AEロック)制御へと切り替える。露出固定制御回路27は、(固定された露出値の情報を含む)露出固定制御が開始されたこと示す情報をマイクロコンピュータ19へ供給する。
そして、マイクロコンピュータ19は、固定された露出値に基づいて、絞り機構駆動制御部8、NDフィルター駆動制御部12、AGC制御回路16、及び撮像素子駆動回路14(の電子シャッター機能)を制御する。これにより、固定された露出値の画像信号が得られる。このように、マイクロコンピュータ19は、固体撮像素子13が検出した輝度に関わらず、露出値を固定する。すなわち、露出固定制御回路27は、マイクロコンピュータ19を介して露出固定制御を行う。
ステップS105では、第1タイマカウンタ25が、露出固定制御が開始されたこと示す情報をマイクロコンピュータ19から受け取る。第1タイマカウンタ25は、露出固定制御が開始されたことに応じて、第1時間が設定されるとともに、露出固定時間をカウントし始める。第1タイマカウンタ25は、露出固定時間が第1時間に達したら、第1時間が経過した旨の情報をマイクロコンピュータ19へ出力する。
ステップS106では、内部センサー輝度変化量検出回路21が、露出固定制御が開始されたこと示す情報とデジタルデータとをマイクロコンピュータ19から受け取る。内部センサー輝度変化量検出回路21は、固体撮像素子13が検出した輝度の変化量を検出する。すなわち、内部センサー輝度変化量検出回路21は、露出固定制御が開始された後に、デジタルデータが示す画像における単位時間当たりの輝度の変化量(内側輝度変化量)を検出する。
例えば、図3に示すように、太線で囲まれた第1の領域DA1に対して固体撮像素子13が輝度を検出し、細線で囲まれた第2の領域DA2に対して測光センサー20が輝度を検出する。初期状態において、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第1の領域DA1にも第2の領域DA2にも存在していない状態になっている。このとき、図5に示すように、固体撮像素子13が検出する複数の分割エリアDA23〜DAn−1m−2の平均輝度がB11である。経過時間がT1以上T2以下のとき、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第2の領域DA2だけに侵入している状態になる(図3参照)。これにより、例えば、経過時間がT3のとき、固体撮像素子13が検出する複数の分割エリアDA23〜DAn−1m−2の平均輝度がB11に維持される。これにより、内部センサー輝度変化量検出回路21は、内側輝度変化量として
ΔB113=(B11−B11)/(T3−T1)=0・・・数式3
を検出する。経過時間がT2以上のとき、主被写体O1が第1の領域DA1に存在しており、移動被写体O2が第2の領域DA2及び第1の領域DA1に侵入している状態になる(図4参照)。これにより、例えば、経過時間がT4のとき、測光センサー20が検出する複数の分割エリアDA23〜DAn−1m−2の平均輝度がB14に低下する。これにより、内部センサー輝度変化量検出回路21は、内側輝度変化量として
ΔB124=(B11−B14)/(T4−T2)・・・数式4
を検出する。
第2タイマカウンタ26は、内側輝度変化量の情報をマイクロコンピュータ19から受け取る。第2タイマカウンタ26は、内側輝度変化量の情報に基づき、内側輝度変化量が内側閾値以上であるか否かを判断する。第2タイマカウンタ26は、内側輝度変化量が内側閾値以上であると判断した場合、処理をステップS110へ進める。第2タイマカウンタ26は、内側輝度変化量が内側閾値以上でないと判断した場合、処理をステップS107へ進める。
例えば、第2タイマカウンタ26は、タイミングT3から第1時間ΔTth1(図5参照)以内に内側輝度変化量が内側閾値以上であると判断する場合、移動被写体O2が第1の領域DA1へと侵入しようとしていると判断する(図3〜図5参照)。このとき、第2タイマカウンタ26は、処理をステップS110へ進める。
また、第2タイマカウンタ26は、タイミングT3から第1時間ΔTth1(図5参照)以内に内側輝度変化量が内側閾値以上でないと判断する場合、移動被写体O2が第1の領域DA1に侵入すること以外の要因が発生していないと判断する。第2タイマカウンタ26は、例えば、撮像装置100のパン・チルトが行われていないと判断する。このとき、第2タイマカウンタ26は、処理をステップS107へ進める。
ステップS107では、第2タイマカウンタ26は、第1時間が経過した旨の情報をマイクロコンピュータ19から受け取った場合、第1時間が経過したと判断する。第2タイマカウンタ26は、第1時間が経過した旨の情報をマイクロコンピュータ19から受け取っていない場合、第1時間が経過していないと判断する。第2タイマカウンタ26は、第1時間が経過したと判断した場合、処理をステップS108へ進め、第1時間が経過していないと判断した場合、処理をステップS106へ進める。
ステップS108では、第2タイマカウンタ26が、第2時間が設定されるとともに、固定継続時間をカウントし始める。第2タイマカウンタ26は、固定継続時間が第2時間に達したら、第2時間が経過した旨の情報をマイクロコンピュータ19へ出力する。すなわち、第2タイマカウンタ26は、露出が固定されてから第1時間+第2時間(一定時間)が経過した旨の情報をマイクロコンピュータ19へ出力する。
ステップS109では、露出固定解除回路28が、第2時間が経過した旨の情報をマイクロコンピュータ19から受け取った場合、第2時間が経過したと判断する。露出固定解除回路28は、第2時間が経過した旨の情報をマイクロコンピュータ19から受け取っていない場合、第2時間が経過していないと判断する。露出固定解除回路28は、第2時間が経過したと判断した場合、処理をステップS110へ進め、第2時間が経過していないと判断した場合、処理をステップS109へ進める。
ステップS110では、露出固定解除回路28が、露出固定制御を解除する。
すなわち、露出固定解除回路28は、内側輝度変化量が内側閾値以上である旨の情報に基づいて、または、露出固定制御が開始されてから第1時間+第2時間が経過したと判断したことに基づいて、露出固定制御を解除する。露出固定解除回路28は、露出固定制御を解除する旨の情報をマイクロコンピュータ19へ供給する。マイクロコンピュータ19は、露出固定制御を解除する旨の情報に従って、処理をステップS102へ進める。
例えば、露出固定解除回路28は、内側輝度変化量が内側閾値以上である場合に、移動被写体O2が第1の領域DA1に侵入したこと以外の要因により、固体撮像素子13が取得する画像の輝度が変化したと判断する。例えば、露出固定解除回路28は、撮像装置100のパン・チルトが行われた結果であると判断し、露出固定制御を解除する。
あるいは、例えば、露出固定解除回路28は、第2時間ΔTth2(図5参照)が経過したと判断した場合、移動被写体O2が通過して第1の領域DA1から外れたと判断し、露出固定制御を解除する。
以上のように、移動被写体O2が第1の領域DA1に侵入したこと以外の要因が発生していない場合に、第1の領域DA1に輝度を不安定にする移動被写体O2が第1の領域DA1に侵入することを予測できる。これにより、移動被写体O2が第1の領域DA1に侵入する前に、露出の制御を自動露出制御から露出固定制御へ切り替えることできので、露出が不適切に固定されることを避けることができる。すなわち、露出を適正に固定できる。
また、移動被写体O2が第1の領域DA1を通過した後に、露出固定制御を解除して自動露出制御を再開することができる。これにより、必要以上に長い時間露出を固定することを避けることができ、露出を適正に固定できる。
一方、移動被写体O2が第1の領域DA1に侵入したこと以外の要因が発生している場合に、露出固定制御を解除することできる。これにより、露出を固定するのが好ましくない場合まで露出が固定されることを避けることができるので、露出を適正に固定できる。
なお、内部センサー輝度変化量検出回路21は、第1の領域DA1における一部の分割エリアの内側輝度変化量を検出してもよい。
内部センサー輝度変化量検出回路21は、内側輝度変化量として、撮影範囲全体における輝度の単位時間当たりの変化量を検出してもよい。
また、外部センサー輝度変化量検出回路22は、周辺輝度変化量として、撮影周辺範囲PA全体における輝度の単位時間当たりの変化量を検出してもよい。このとき、撮影周辺範囲に移動被写体O2が侵入した場合と、撮影周辺範囲の輝度が一様に変化した場合とを区別できるようになっていることが好ましい。例えば、外部センサー輝度変化量検出回路22は、周辺輝度変化量が周辺閾値以上及び周辺上限値にあると判断する場合に、撮影周辺範囲に移動被写体O2が侵入したと判断してもよい。
撮像装置100では、第1タイマカウンタ25及び第2タイマカウンタ26の機能が、1つのタイマカウンタで実現されていても良い。
次に、第2実施形態に係る撮像装置の構成及び動作を、図7を用いて説明する。図7は、第2実施形態に係る撮像装置の構成図である。第1実施形態と異なる部分を中心に説明し、同様の部分に関しては説明を省略する。
撮像装置200は、マイクロコンピュータ219、タイマ時間計算回路(決定手段)223、ズーム量検出回路(ズーム量検出手段)224、第1タイマカウンタ225及び第2タイマカウンタ226を備える。
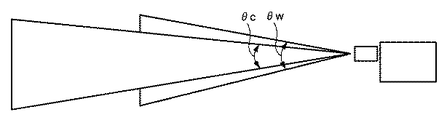
第2実施形態では、第1タイマカウンタ225に設定される第1時間と、第2タイマカウンタ226に設定される第2時間との合計(一定時間)が、レンズ群1のズーム量に応じて変更されることを特徴としている。ここで、図12に示すように、ワイド端における画角をθw、現在のズーム状態における画角をθcとすると、ズーム量Δθは、
Δθ=θw−θc・・・数式5
で表される量である。
具体的には、ズーム量検出回路224は、マイクロコンピュータ219から(ズーム検出部3が検出した)ズーム状態の情報を受け取る。ズーム量検出回路224は、ズーム状態の情報に基づいて、ズーム量を演算する(数式5参照)。ズーム量検出回路224は、ズーム量の情報をマイクロコンピュータ219へ供給する。タイマ時間計算回路223は、ズーム量の情報をマイクロコンピュータ219から受け取る。タイマ時間計算回路223は、ズーム量の情報と、通常の人間が歩行する速度とに基づいて、第1時間及び第2時間を決定する(図15〜図17参照)。タイマ時間計算回路223は、決定した第1時間及び第2時間の情報をマイクロコンピュータ219へ供給する。
なお、本実施形態では第1時間及び第2時間を、ズーム量の情報と、通常の人間が歩行する速度とに基づいて算出しているが、ズーム量の情報と予め設定された速度とに基づいて算出してもよい。ここでいう、予め設定された速度とは、撮像装置に予め設定されている固定値であってもよいし、撮影モードやシャッタースピード値に応じて設定されている値(スポーツモードや高速シャッター状態では小さい値に設定等)であってもよい。
第1タイマカウンタ225は、決定された第1時間の情報をマイクロコンピュータ219から受け取る。第1タイマカウンタ225は、露出固定制御が開始されたことに応じて、決定された第1時間が設定されるとともに、露出固定時間をカウントし始める。
第2タイマカウンタ226は、決定された第2時間の情報をマイクロコンピュータ219から受け取る。第2タイマカウンタ226は、第1時間以内に内側輝度変化量が内側閾値以下であると判断した場合、決定された第2時間が設定されるとともに、固定継続時間をカウントし始める。
次に、第2実施形態における撮像装置の露出制御方法が、図8〜図17に示すように、以下の点で第1実施形態と異なる。図8は、撮像装置が露出を制御する処理の流れを示すフローチャートである。図9〜図11は、輝度を検出する対象領域を示す図である。図12は、ズーム量を示す図である。図13及び図14は、輝度の時間的変化を示す図である。図15は、ズーム量と第1時間+第2時間との関係を示す図である。図16は、ズーム量と第1時間との関係を示す図である。図17は、ズーム量と第2時間との関係を示す図である。なお、第1実施形態と異なる処理を中心に説明し、同様の処理については説明を省略する。
ステップS211(ズーム量検出ステップ)では、ズーム量検出回路224は、マイクロコンピュータ219から(ズーム検出部3が検出した)ズーム状態の情報を受け取る。ズーム量検出回路224は、ズーム状態の情報に基づいて、ズーム量を演算する。ズーム量検出回路224は、ズーム量の情報をマイクロコンピュータ219へ供給する。
ステップS212(決定ステップ)では、タイマ時間計算回路223は、ズーム量の情報をマイクロコンピュータ219から受け取る。タイマ時間計算回路223は、ズーム量の情報と、通常の人間が歩行する速度とに基づいて、第1時間及び第2時間を決定する(図15〜図17参照)。タイマ時間計算回路223は、決定した第1時間及び第2時間の情報をマイクロコンピュータ219へ供給する。
具体的には、タイマ時間計算回路223は、第1の領域DA11〜DA13と第2の領域DA21〜DA23との面積の相対的割合(図9〜図11参照)が光学ズームを行なった場合に変化することに着眼して、第1時間及び第2時間を決める。
ここで、ズーム機構駆動制御装置4がモータ2によりレンズ群1のズームをワイド端(ズーム量最小)に制御している状態では、図9に示すように、第1の領域DA11の面積が第2の領域DA21の面積よりも大きくなる。
一方、ズーム機構駆動制御装置4がモータ2によりレンズ群1のズーム量を大きくしていくと、図9に示す状態から図10や図11に示すように、第1の領域DA11の面積が第2の領域DA21の面積よりも小さくなる。そこで、第1の領域DA11の面積と第2の領域DA21の面積とが等しくなるときのズーム量をZMthとする(図15参照)。
ここで、図9の状態では、移動被写体O2が第2の領域DA21に侵入する前に第1の領域DA11に進入してしまい、移動被写体O2が第1の領域DA11に進入することを予測できない。そこで、タイマ時間計算回路223は、ズーム量がZMth以下の場合、第1時間及び第2時間をともに0に決定し(図15〜図17参照)、実質的に露出固定制御が行われないようにする。
タイマ時間計算回路223は、ズーム量がZMth以上の場合、ズーム量が大きいほど移動被写体O2が第2の領域DA22,DA23に進入してから第1の領域DA12,DA13へ到達する時間が長いと予測する。そして、タイマ時間計算回路223は、ズーム量がZMth以上の場合、ズーム量が大きいほど第1時間を長い時間に決定する。例えば、タイマ時間計算回路223は、ズーム量がZM2の場合(図12参照)、第1時間をΔTth12に決定する(図13及び図16参照)。例えば、タイマ時間計算回路223は、ズーム量がZM3の場合(図12参照)、第1時間をΔTth13に決定する(図14及び図16参照)。
また、タイマ時間計算回路223は、ズーム量がZMth以上の場合、ズーム量が大きいほど移動被写体O2が第1の領域DA12,DA13を通過する時間が短いと予測する。そして、タイマ時間計算回路223は、ズーム量がZMth以上の場合、ズーム量が大きいほど第2時間を短い時間に決定する。例えば、タイマ時間計算回路223は、ズーム量がZM2の場合(図12参照)、第2時間をΔTth22に決定する(図13及び図17参照)。例えば、タイマ時間計算回路223は、ズーム量がZM3の場合(図12参照)、第2時間をΔTth23に決定する(図14及び図17参照)。
すなわち、タイマ時間計算回路223は、ズーム量がZMth以上の場合、ズーム量が大きいほど露出が固定される時間(第1時間+第2時間)が短い時間になるように決定する(図15参照)。
ステップS205では、第1タイマカウンタ225が、決定された第1時間の情報と、露出固定制御が開始されたこと示す情報とをマイクロコンピュータ19から受け取る。第1タイマカウンタ25は、露出固定制御が開始されたことに応じて、決定された第1時間が設定されるとともに、露出固定時間をカウントし始める。第1タイマカウンタ25は、露出固定時間が第1時間に達したら、第1時間が経過した旨の情報をマイクロコンピュータ19へ出力する。
ステップS208では、第2タイマカウンタ226は、決定された第2時間の情報をマイクロコンピュータ219から受け取る。第2タイマカウンタ26は、第2時間が設定されるとともに、固定継続時間をカウントし始める。第2タイマカウンタ26は、固定継続時間が第2時間に達したら、第2時間が経過した旨の情報をマイクロコンピュータ19へ出力する。すなわち、第2タイマカウンタ226は、露出が固定されてから第1時間+第2時間(一定時間)が経過した旨の情報をマイクロコンピュータ219へ出力する。
なお、本実施形態においては、ズームをワイド端に制御している状態では、第1の領域DA11の面積が第2の領域DA21の面積よりも大きくなっている。しかし、ワイド端に制御されている状態でも、第2の領域DA21の面積が第1の領域DA11の面積以上になるように設定してもい。
また、本実施形態においては、ズームに関して、ズーム機構駆動制御装置4による光学ズームを行うことを前提にしているが、光学ズームのテレ端に達した場合は、デジタル信号処理回路18による電子ズームに切り替えてズームを行うようにしてもよい。
こうすることで、電子ズーム機能しか備えない撮像装置においても、本発明を適用可能である。
以上のように、露出が固定される時間(第1時間+第2時間)を、ズーム量の情報と、通常の人間が歩行する速度とに基づいて予測して決定する。これにより、露出を固定する時間を適正な長さにできる。
なお、タイマ時間計算回路223は、演算式により、露出が固定される時間(第1時間+第2時間)を計算して決定しても良い。
また、本発明において、細線で囲まれた第2の領域を測光センサにて測光して被写体の出入りを監視しているが、赤外センサ、温度センサ等被写体の出入りを監視できるセンサであればどのようなセンサでも良い。これは、太線で囲まれた第1の領域における測光データは撮影データとして必要であるが、細線で囲まれた第2の領域におけるデータは、撮影のデータとしては必要ないためである。