JP4954195B2 - ランディングフラップ駆動システム - Google Patents
ランディングフラップ駆動システム Download PDFInfo
- Publication number
- JP4954195B2 JP4954195B2 JP2008505814A JP2008505814A JP4954195B2 JP 4954195 B2 JP4954195 B2 JP 4954195B2 JP 2008505814 A JP2008505814 A JP 2008505814A JP 2008505814 A JP2008505814 A JP 2008505814A JP 4954195 B2 JP4954195 B2 JP 4954195B2
- Authority
- JP
- Japan
- Prior art keywords
- landing flap
- drive system
- landing
- drive
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000009467 reduction Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 claims description 3
- 238000009434 installation Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 6
- 230000035515 penetration Effects 0.000 description 5
- 230000010354 integration Effects 0.000 description 3
- 210000004513 dentition Anatomy 0.000 description 2
- 230000036346 tooth eruption Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B64D45/0005—Devices specially adapted to indicate the position of a movable element of the aircraft, e.g. landing gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/24—Transmitting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B64C9/14—Adjustable control surfaces or members, e.g. rudders forming slots
- B64C9/16—Adjustable control surfaces or members, e.g. rudders forming slots at the rear of the wing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B64D45/0005—Devices specially adapted to indicate the position of a movable element of the aircraft, e.g. landing gear
- B64D2045/001—Devices specially adapted to indicate the position of a movable element of the aircraft, e.g. landing gear for indicating symmetry of flaps deflection
Description
Claims (10)
- 航空機用のランディングフラップ駆動システムであって、
前記ランディングフラップ駆動システムは、
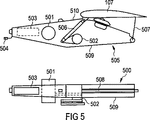
ランディングフラップを駆動する第1駆動モータ(501)、
前記ランディングフラップを固定する1つのブレーキ装置、
前記ランディングフラップを駆動する1つのアクチュエータ(502)、及び
第1駆動モータ(501)を制御するモータ電子機器(503)、を有し、
前記アクチュエータは、第1駆動モータによって駆動され、
前記ランディングフラップ駆動システムが、前記ランディングフラップの1つのトラック(509)に統合され、
前記第1駆動モータと前記ランディングフラップを駆動する第2駆動モータとの同期取りが、前記第1駆動モータと前記第2駆動モータとの間に機械的な連結手段を用いることなく位置センサを用いて電気的に行われる、ランディングフラップ駆動システム。 - 前記ランディングフラップの動作速度を低減させる減速ギヤ装置をさらに備えた、請求項1に記載のランディングフラップ駆動システム。
- 前記位置センサが前記アクチュエータ、前記第1駆動モータ又は前記第2駆動モータに設けられる、請求項1又は2に記載のランディングフラップ駆動システム。
- 構造的な完全性を保証する安全荷重経路をさらに備え、
前記安全荷重経路は、構造的な故障の際に、前記ランディングフラップを保持するように設計された、請求項1から3のいずれか1項に記載のランディングフラップ駆動システム。 - 前記ランディングフラップ駆動システムを航空機の翼に取り付けるための第1取付領域と、
前記ランディングフラップ駆動システムを前記ランディングフラップに取り付けるための第2取付領域と、をさらに備えた、請求項1から4のいずれか1項に記載のランディングフラップ駆動システム。 - 前記ランディングフラップ駆動システムをエネルギー供給部に接続する第1インターフェース部と、
前記ランディングフラップ駆動システムを、該ランディングフラップ駆動システムの制御用信号線に接続する第2インターフェース部と、をさらに備えた、請求項1から5のいずれか1項に記載のランディングフラップ駆動システム。 - 前記第1駆動モータが電気機械式モータである、請求項1から6のいずれか1項に記載のランディングフラップ駆動システム。
- 前記トラック(509)が、請求項1から7のいずれか1項に記載のランディングフラップ駆動システムを備えた、航空機用ランディングフラップのトラック。
- 請求項1から7のいずれか1項に記載のランディングフラップ駆動システムを有する航空機。
- 航空機において、請求項1から7のいずれか1項に記載のランディングフラップ駆動システムを使用する方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US67138605P | 2005-04-14 | 2005-04-14 | |
| US60/671,386 | 2005-04-14 | ||
| DE102005017307A DE102005017307A1 (de) | 2005-04-14 | 2005-04-14 | Landeklappenantriebssystem |
| DE102005017307.1 | 2005-04-14 | ||
| PCT/EP2006/003392 WO2006108648A1 (en) | 2005-04-14 | 2006-04-12 | Landing flap drive system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008535732A JP2008535732A (ja) | 2008-09-04 |
| JP2008535732A5 JP2008535732A5 (ja) | 2009-05-14 |
| JP4954195B2 true JP4954195B2 (ja) | 2012-06-13 |
Family
ID=37067742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008505814A Expired - Fee Related JP4954195B2 (ja) | 2005-04-14 | 2006-04-12 | ランディングフラップ駆動システム |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8157208B2 (ja) |
| EP (1) | EP1868888B1 (ja) |
| JP (1) | JP4954195B2 (ja) |
| CN (1) | CN100548796C (ja) |
| BR (1) | BRPI0610450B1 (ja) |
| CA (1) | CA2602667C (ja) |
| DE (2) | DE102005017307A1 (ja) |
| RU (1) | RU2399554C2 (ja) |
| WO (1) | WO2006108648A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006030315A1 (de) * | 2006-06-30 | 2008-01-17 | Airbus Deutschland Gmbh | Hochauftriebssystem am Tragflügel eines Flugzeugs |
| DE102007036996A1 (de) * | 2007-08-06 | 2009-02-19 | Airbus Deutschland Gmbh | Hochauftriebssystem für ein Flugzeug |
| US8451144B2 (en) * | 2009-02-04 | 2013-05-28 | Honeywell International Inc. | Flaps overspeed advisory system |
| GB0906270D0 (en) * | 2009-04-14 | 2009-05-20 | Ge Aviat Systems Ltd | High lift devices for aircraft |
| DE102010025475A1 (de) * | 2010-06-29 | 2011-12-29 | Airbus Operations Gmbh | Stellsystem eines Flugzeugs mit einer Stellklappe |
| FR2972175B1 (fr) | 2011-03-01 | 2013-10-25 | Sagem Defense Securite | Procede de commande simultanee d'actionneurs de deplacement de volets d'aeronef, dispositif de motorisation de volets d'aeronef et aeronef pourvu d'un tel dispositif |
| US8438743B2 (en) * | 2011-06-01 | 2013-05-14 | Hamilton Sundstrand Corporation | Resolver type skew sensor with gimbal attachment |
| GB201117340D0 (en) * | 2011-10-07 | 2011-11-23 | Airbus Uk Ltd | Flat support |
| DE102012111690A1 (de) * | 2012-11-30 | 2014-06-05 | Airbus Operations Gmbh | Formvariabler aerodynamischer Verkleidungskörper für einen Klappen-Verstellmechanismus eines Luftfahrzeugs |
| US9073643B2 (en) | 2013-03-28 | 2015-07-07 | The Boeing Company | Monitoring of high-lift systems for aircraft |
| EP3025955B1 (de) * | 2014-11-26 | 2019-06-19 | Airbus Defence and Space GmbH | Hochauftriebssystem |
| CN108263596A (zh) * | 2018-03-07 | 2018-07-10 | 陕西金色科技有限公司 | 一种自动调整机翼位置的快拆机构及其调整方法 |
| US20230348043A1 (en) * | 2022-05-02 | 2023-11-02 | The Boeing Company | Systems and methods for controlling a flight control surface of an aircraft |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2500691A (en) * | 1945-01-22 | 1950-03-14 | Lear Inc | Mechanical actuator system |
| US2826379A (en) * | 1956-03-26 | 1958-03-11 | Lockheed Aircraft Corp | Aircraft wing flap carriage |
| DE2914974C2 (de) | 1979-04-12 | 1985-09-12 | Dornier Gmbh, 7990 Friedrichshafen | Kombinierte Auftriebs- bzw. Steuerklappe, insbesondere an der Hinterkante von Flugzeugtragflügeln |
| US4471928A (en) * | 1980-08-13 | 1984-09-18 | The Boeing Company | Extendible airfoil track assembly |
| US4688744A (en) * | 1982-09-03 | 1987-08-25 | Sundstrand Corporation | Jam tolerant rotary actuation system |
| US4575027A (en) * | 1983-05-16 | 1986-03-11 | Lockheed Corporation | Electromechanical actuator system with anti-jamming features |
| US5161757A (en) * | 1989-07-31 | 1992-11-10 | The Boeing Company | Extending bent shaft flap drive |
| US5092539A (en) * | 1989-10-13 | 1992-03-03 | Bell Helicopter Textron Inc. | Jam resistant ball screw actuator |
| DE4107556C1 (ja) * | 1991-03-08 | 1992-05-14 | Deutsche Airbus Gmbh, 2000 Hamburg, De | |
| US5806805A (en) * | 1996-08-07 | 1998-09-15 | The Boeing Company | Fault tolerant actuation system for flight control actuators |
| US5788190A (en) * | 1996-10-22 | 1998-08-04 | The Boeing Company | Slotted cruise trailing edge flap |
| FR2811780B1 (fr) * | 2000-07-13 | 2002-08-30 | Aerospatiale Matra Airbus | Procede et dispositif de commande d'organes de manoeuvre d'un aeronef, a modules de secours electriques |
| RU19650U1 (ru) | 2001-03-28 | 2001-09-20 | Государственный космический научно-производственный центр им. М.В. Хруничева | Ручной привод закрылков легкого самолета |
| DE10133920B4 (de) | 2001-07-12 | 2004-05-13 | Eads Deutschland Gmbh | Auftriebsklappen-Mechanismus |
| AT410656B (de) * | 2001-10-24 | 2003-06-25 | Fischer Adv Components Gmbh | Trag- bzw. führungsvorrichtung für flugzeugkomponenten |
| US6755375B2 (en) * | 2002-10-22 | 2004-06-29 | The Boeing Company | Method and apparatus for controlling aircraft devices with multiple actuators |
| DE10313728B4 (de) * | 2003-03-27 | 2011-07-21 | Airbus Operations GmbH, 21129 | Klappensystem am Tragflügel eines Starrflügel-Flugzeuges |
| US20040200928A1 (en) * | 2003-04-14 | 2004-10-14 | Arthur Degenholtz | Actuator and flap arrangement with actuator interconnection |
| DE10339030B4 (de) * | 2003-08-25 | 2005-11-03 | Man Technologie Ag | Tragstruktur für eine ein- und ausfahrbare Klappe und deren Verwendung |
-
2005
- 2005-04-14 DE DE102005017307A patent/DE102005017307A1/de not_active Withdrawn
-
2006
- 2006-04-12 EP EP06724293A patent/EP1868888B1/en active Active
- 2006-04-12 CA CA2602667A patent/CA2602667C/en not_active Expired - Fee Related
- 2006-04-12 CN CNB2006800120488A patent/CN100548796C/zh active Active
- 2006-04-12 BR BRPI0610450-9A patent/BRPI0610450B1/pt active IP Right Grant
- 2006-04-12 DE DE602006014117T patent/DE602006014117D1/de active Active
- 2006-04-12 RU RU2007141192/11A patent/RU2399554C2/ru not_active IP Right Cessation
- 2006-04-12 US US11/911,231 patent/US8157208B2/en active Active
- 2006-04-12 JP JP2008505814A patent/JP4954195B2/ja not_active Expired - Fee Related
- 2006-04-12 WO PCT/EP2006/003392 patent/WO2006108648A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| DE602006014117D1 (de) | 2010-06-17 |
| CA2602667C (en) | 2012-12-18 |
| EP1868888B1 (en) | 2010-05-05 |
| WO2006108648A1 (en) | 2006-10-19 |
| BRPI0610450B1 (pt) | 2019-07-16 |
| RU2399554C2 (ru) | 2010-09-20 |
| BRPI0610450A2 (pt) | 2010-06-22 |
| CN101184664A (zh) | 2008-05-21 |
| US20080191089A1 (en) | 2008-08-14 |
| DE102005017307A1 (de) | 2006-10-26 |
| JP2008535732A (ja) | 2008-09-04 |
| EP1868888A1 (en) | 2007-12-26 |
| US8157208B2 (en) | 2012-04-17 |
| CA2602667A1 (en) | 2006-10-19 |
| RU2007141192A (ru) | 2009-05-20 |
| CN100548796C (zh) | 2009-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4954195B2 (ja) | ランディングフラップ駆動システム | |
| US11414174B1 (en) | Electrically driven blade control for rotorcraft | |
| JP4418698B2 (ja) | 固定翼飛行機の主翼のフラップシステム | |
| US9682769B2 (en) | High lift system for an aircraft with two separate drive units | |
| US8746614B2 (en) | System for actuating at least one positioning flap of an aircraft and a method for monitoring the system | |
| CN102046467B (zh) | 用于调节飞机的襟翼的且具有带有固定的旋转轴的调节运动机构的容错作动系统以及用于监测作动系统的方法 | |
| US20040200928A1 (en) | Actuator and flap arrangement with actuator interconnection | |
| US20150321750A1 (en) | Drive system for a variable camber aircraft wing | |
| US10753444B2 (en) | Summing and fault tolerant rotary actuator assembly | |
| US20090206197A1 (en) | Actuator and flap arrangement with actuator interconnection | |
| US20140027580A1 (en) | High lift system for an aircraft | |
| EP3653493B1 (en) | High-lift actuation system having centralized inboard actuation control and independent outboard actuation control | |
| JP2008535732A5 (ja) | ||
| US6705570B1 (en) | Arrangement and associated system having an actuator and a tubular flap-drive member about the actuator | |
| CN112041226A (zh) | 用于飞机机翼的系统 | |
| EP3620372A1 (en) | High-lift actuation system with clutch architecture | |
| JP2019018722A (ja) | 電気機械式アクチュエータを備える航空機操舵システム | |
| CN102712358B (zh) | 飞机机翼 | |
| CN109982927A (zh) | 易于安装的致动器 | |
| US10591001B2 (en) | Fault tolerant actuator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120313 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4954195 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150323 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |