JP4931250B2 - Imaging apparatus and control method - Google Patents
Imaging apparatus and control method Download PDFInfo
- Publication number
- JP4931250B2 JP4931250B2 JP2008092366A JP2008092366A JP4931250B2 JP 4931250 B2 JP4931250 B2 JP 4931250B2 JP 2008092366 A JP2008092366 A JP 2008092366A JP 2008092366 A JP2008092366 A JP 2008092366A JP 4931250 B2 JP4931250 B2 JP 4931250B2
- Authority
- JP
- Japan
- Prior art keywords
- subject
- light emission
- distance
- information
- emission amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003384 imaging method Methods 0.000 title claims description 75
- 238000000034 method Methods 0.000 title claims description 28
- 238000004364 calculation method Methods 0.000 claims description 43
- 238000012545 processing Methods 0.000 description 34
- 238000001514 detection method Methods 0.000 description 32
- 238000005375 photometry Methods 0.000 description 17
- 238000004891 communication Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000012937 correction Methods 0.000 description 10
- 239000008186 active pharmaceutical agent Substances 0.000 description 7
- 238000009825 accumulation Methods 0.000 description 6
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000005484 gravity Effects 0.000 description 4
- 239000000203 mixture Substances 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 210000003128 head Anatomy 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000011514 reflex Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000003705 background correction Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000003863 fast low-angle shot imaging Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229910052724 xenon Inorganic materials 0.000 description 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 1
Images










Landscapes
- Exposure Control For Cameras (AREA)
- Stroboscope Apparatuses (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
Description
本発明は、フラッシュ発光による撮影が可能な撮像装置及び制御方法に関する。 The present invention relates to an imaging apparatus and a control how that can be taken by the flash.
従来、撮像装置(カメラ、デジタルスチルカメラ)でフラッシュ撮影を行う際のフラッシュ発光制御に関する各種の技術が提案されているが、その中でも特に次の方式の提案が多い。露光動作に先立ってフラッシュのプリ発光(予備発光)を行い、プリ発光による被写体の反射光を撮像画面(ファインダまたはディスプレイにより観察される被写体画像)内の複数に分割された領域毎に測光して本発光量を決定する方式である。これは、分割された領域毎の測光結果により所定のアルゴリズムにより本発光量を決めることで、様々な撮影シーンに対して適切な発光量を決定できるからである。 Conventionally, various techniques relating to flash emission control when performing flash photography with an imaging device (camera, digital still camera) have been proposed. Prior to the exposure operation, flash pre-emission (preliminary emission) is performed, and the reflected light of the subject by pre-emission is measured for each of the divided areas in the imaging screen (subject image observed by the viewfinder or display). This is a method for determining the main light emission amount. This is because an appropriate light emission amount can be determined for various shooting scenes by determining the main light emission amount by a predetermined algorithm based on the photometric results for each divided area.
上記のフラッシュ発光制御に関しては、安定して適切な露光量が得られるように以下のような撮像方法が提案されている(例えば、特許文献1参照)。まず、プリ発光が行われる直前の各測光エリアの測光値P(i)と、プリ発光が行われている時の各測光エリアの測光値H(i)との比R(i)を、測光エリア毎に演算する。得られたR(i)の中で最大のものを基準値baseRとして抽出し、基準値baseRと各測光エリアのR(i)の値を比較して各測光エリアに対する重み付け係数W(i)を決定する。次に、重み付け係数W(i)に従って各測光エリアのプリ発光時の反射光量を重み付け平均して得られた重み付け平均結果により、本発光量を演算する。 Regarding the above flash emission control, the following imaging method has been proposed so that an appropriate exposure amount can be obtained stably (see, for example, Patent Document 1). First, the ratio R (i) between the photometric value P (i) of each photometric area immediately before the pre-flash is emitted and the photometric value H (i) of each photometric area when the pre-flash is executed is measured by Calculate for each area. The largest R (i) obtained is extracted as the reference value baseR, and the reference value baseR is compared with the value of R (i) of each photometric area to obtain the weighting coefficient W (i) for each photometric area. decide. Next, the actual light emission amount is calculated based on the weighted average result obtained by weighted averaging of the reflected light amount at the time of pre-emission in each photometry area according to the weighting coefficient W (i).
また、被写体の輝度が十分ではない場合でも人物顔領域を検出して良好な露出を得るために以下のような撮像方法が提案されている(例えば、特許文献2参照)。まず、フラッシュのプリ発光時に撮像した画像を基に画像内に人物の顔領域が存在するかどうかを検出する。次に、検出された顔領域に応じて調光領域を決定し、この決定された調光領域によるプリ発光時の測光値に応じて本発光量を演算する。 Further, the following imaging method has been proposed in order to detect a human face region and obtain a good exposure even when the luminance of the subject is not sufficient (see, for example, Patent Document 2). First, it is detected whether or not a person's face area exists in the image based on the image captured at the time of flash pre-flash. Next, a light control area is determined according to the detected face area, and the main light emission amount is calculated according to a photometric value at the time of pre-emission in the determined light control area.
また、フラッシュ発光制御に関する以下のような撮像方法が提案されている(例えば、特許文献3参照)。被写体の撮像で得た撮像信号から所定の被写体像(具体的には人物の顔)を抽出し、その抽出された被写体像の大きさを基に被写体までの距離を演算し、演算結果をフラッシュ発光制御等に用いる。
特許文献1に記載の技術によれば、多くの撮影シーンで安定した露出が得られると共に、同一のシーンを少しだけ構図の変更を行って撮影した場合でも露出の変化が少ない撮像結果が得られる。しかし、経験則的に各測光エリアのうち所定条件を満たすR(i)の中で最大のものを主被写体エリアと見なし、そのエリアの反射光量から基準値baseRを抽出している。そのため、撮像画面内で比較的近距離に存在するもの或いは反射率が高めのものに、重み付け係数W(i)が大きくなる傾向が高い。従って、もしも本当の主被写体が上記所定条件に当てはまっていなかった場合には、撮影者の期待通りの露出とならない場合がある。
According to the technique described in
また、特許文献1では、プリ発光時の被写体の反射光に基づき本発光量を演算する。そのため、被写体の反射率が高反射率である場合や低反射率である場合には、被写体の反射率に依存して本来の好ましい露出とずれる場合がある。
In
また、特許文献2に記載の技術によれば、主被写体が人物であり且つその人物の顔が確実に検出されている場合には、良好な露出となる可能性が高くなる。しかし、撮像画面に占める顔領域の大きさに対してプリ発光時の反射光の測光を行うセンサの分解能が十分でないような場合には、次の問題が発生する。顔領域だけを調光領域として本発光量を決定しようとしても、人物の背景など他の領域の影響を除外できなくなり露出が良好でなくなる場合がある。
Further, according to the technique described in
特許文献3に記載の技術によれば、被写体の顔の大きさから被写体までの撮影距離を演算し、その距離に応じた発光量を決定することで、被写体の反射率には依存せずに本来の好ましい露出にできる可能性が高まる。一般的にフラッシュ撮影を行う場合は、被写体までの正確な距離情報が入手できれば、その距離情報と撮影時の絞り値とから必要なフラッシュ発光量の算出が可能である。算出したフラッシュ発光量は被写体の反射率に依存しない情報となるので、被写体までの距離情報を入手できることは好ましい。
According to the technique described in
しかし、撮像画像から顔を検出する現状の技術の多くは、例えばポスターなどの印刷物に印刷された顔画像も人物の顔として検出する。印刷物上の顔画像は実物の顔の大きさと一致しているとは限らないので、このような場合は被写体の大きさから演算された撮影距離に大きな誤差が生じる可能性が高くなり、結果として撮影時の露出が好ましいものにならないケースが出てくる。 However, many of the current technologies for detecting a face from a captured image also detect a face image printed on a printed material such as a poster as a human face. Since the face image on the printed material does not always match the size of the real face, there is a high possibility that a large error will occur in the shooting distance calculated from the size of the subject. There are cases where the exposure during shooting is not favorable.
また、カメラに装備されたオートフォーカス機構等を用いて被写体までの距離情報を入手する考え方もある。しかし、オートフォーカス機構にも各種条件により測距の検出誤差が様々存在すると共に、撮影レンズの距離環の位置を示す距離エンコーダの情報においても製造誤差などが存在している。そのため、入手できた被写体までの距離情報が実際に被写体までの距離に対して誤差が小さいものなのか、或いは誤差が大きいものなのかを判定することが難しいという問題がある。 There is also a concept of obtaining distance information to a subject using an autofocus mechanism or the like equipped in the camera. However, the autofocus mechanism also has various ranging detection errors depending on various conditions, and also includes manufacturing errors in the distance encoder information indicating the position of the distance ring of the photographing lens. Therefore, there is a problem that it is difficult to determine whether the obtained distance information to the subject actually has a small error with respect to the distance to the subject or a large error.
本発明の目的は、被写体の反射率に依存しない良好な露出と発光量の誤差の影響を低減した安定した露出を得ることを可能とした撮像装置及び制御方法を提供することにある。 An object of the present invention is to provide a possibility as the imaging device and controls how to gain exposure stably with a reduced influence of the error of good exposure and light emission amount does not depend on the reflectance of the subject.
上述の目的を達成するために、本発明にかかる撮像装置は、被写体に対して発光を行う発光手段を用いた撮影が可能な撮像装置であって、焦点調節に伴う撮影レンズのレンズ駆動情報に基づいて前記被写体の距離情報を取得する第1の取得手段と、撮像して得られた画像信号に基づいて前記被写体の顔情報を取得する第2の取得手段と、前記第2の取得手段により取得された前記顔情報に基づいて被写体距離を演算する距離演算手段と、前記第1の取得手段によって得られた前記被写体の距離情報と前記距離演算手段で演算された被写体距離とに基づいて、前記発光手段の本発光量を演算する発光量演算手段と、を備えることを特徴とする。 To achieve the above object, an imaging apparatus according to the present invention is an imaging apparatus capable shooting with emitting means for emitting light to an object, the lens driving information of the photographing lens with the focusing A first acquisition unit that acquires distance information of the subject based on the second acquisition unit, a second acquisition unit that acquires face information of the subject based on an image signal obtained by imaging, and a second acquisition unit; and distance calculating means for calculating the object scene object distance and based on the obtained the face information, the distance information of the object obtained with by the first acquisition means and the subject distance calculated by the calculating means And a light emission amount calculating means for calculating a main light emission amount of the light emitting means .
本発明によれば、良好で安定した露出を得ることが可能となる。 According to the present invention, good and stable exposure can be obtained.
以下、本発明の実施の形態を図面に基づいて説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
図1は、本発明の第1の実施の形態に係る撮像装置としてのカメラ本体、交換レンズ、フラッシュ装置の内部構成を示す構成図である。 FIG. 1 is a configuration diagram showing internal configurations of a camera body, an interchangeable lens, and a flash device as an imaging device according to a first embodiment of the present invention.
図1において、カメラは、レンズ交換が可能ないわゆる一眼レフタイプであり、カメラ本体1に対して交換レンズ2とフラッシュ装置3が着脱可能に構成されている。カメラ本体1は、メカニカルシャッタ(以下シャッタ)10、ローパスフィルタ11、撮像素子12、主ミラー13、第1の反射ミラー14、第2の反射ミラー16、赤外カットフィルタ17、絞り18を備えている。更に、カメラ本体1は、2次結像レンズ19、焦点検出用センサ20、ピント板21、ペンタプリズム22、接眼レンズ23、第3の反射ミラー24、集光レンズ25、測光用センサ26を備えている。
In FIG. 1, the camera is a so-called single-lens reflex type capable of exchanging lenses, and an
撮像素子12は、エリアの蓄積型光電変換素子(例えばCMOSやCCD)から構成されている。主ミラー13は、半透過性の主ミラーである。主ミラー13と第1の反射ミラー14は、ともに撮影時には駆動機構(不図示)により図示の位置から上方に跳ね上げられる。近軸的結像面15は、第1の反射ミラー14による撮像素子12の撮像面と共役な結像面を例示したものである。絞り18は、2つの開口部を有する。
The
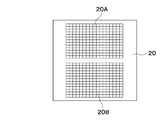
焦点検出用センサ20は、エリアの蓄積型光電変換素子(例えばCMOSやCCD)から構成されており、図2に示すように2つのエリアにそれぞれ配置された受光センサ部20A、受光センサ部20Bを備えている。受光センサ部20A、受光センサ部20Bは、絞り18の2つの開口部にそれぞれ対応しており、多数の区画に分割されている。また、焦点検出用センサ20は、受光センサ部20A、受光センサ部20Bに加えて、信号蓄積部や信号処理用の周辺回路等が同一チップ上に集積回路として作り込まれている。
The
上記の第1の反射ミラー14から焦点検出用センサ20までの構成は、例えば特開平9−184965号公報に詳細に記載されているように、撮像画面内の任意の位置での像ずれ方式での焦点検出を可能とするものである。
The configuration from the first reflecting
測光用センサ26は、例えばシリコンフォトダイオード等の光電変換素子から構成されており、被写体の輝度に関する情報を得るためのセンサである。測光用センサ26は、図3に示すように格子状に複数に分割された受光センサ部26Aを備えており、撮像画面の略全体を視野としている。受光センサ部26Aは、本実施の形態では受光視野内が7列×5行の35分割されている。35分割された各受光部をPD1〜PD35と表記する。測光用センサ26は、受光センサ部26Aに加えて、信号増幅部や信号処理用の周辺回路等が同一チップ上に集積回路として作り込まれている。
The
上記のピント板21、ペンタプリズム22、接眼レンズ23によりファインダ光学系が構成される。測光用センサ26には、主ミラー13により反射されてピント板21により拡散された光線のうち光軸外の一部が入射する。
The
図4は、焦点検出用センサ20による撮像画面内の焦点検出位置と35分割された測光用センサ26との対応位置関係を示す図である。本実施の形態では、撮像画面内の例えば3つの焦点検出位置S0〜S2で焦点検出を行う。焦点検出位置S0は、測光用センサ26の受光部PD18に対応する。焦点検出位置S1は、測光用センサ26の受光部PD16に対応する。焦点検出位置S2は、測光用センサ26の受光部PD20に対応する。尚、測光用センサ26における受光センサ部26Aの分割数35と、3つの焦点検出位置S0〜S2は一例であり、これに限定されるものではない。
FIG. 4 is a diagram illustrating a corresponding positional relationship between the focus detection position in the imaging screen by the
図1の説明に戻る。カメラ本体1において、マウント部27は、カメラ本体1に交換レンズ2を取り付けるための部材である。接点部28は、カメラ本体1と交換レンズ2との間の情報通信に用いられる。接続部29は、カメラ本体1にフラッシュ装置3を取り付けるための部材である。
Returning to the description of FIG. In the
交換レンズ2は、撮影レンズを構成する光学レンズ30a〜30e、絞り31、カメラ本体1と情報通信を行うための接点部32、交換レンズ2をカメラ本体1に取り付けるためのマウント部33を備えている。フラッシュ装置3は、発光部34(本例ではキセノン管)、反射笠35、集光用のフレネルレンズ36、発光部34の発光量を検出する発光量センサ(モニタセンサ)37、フラッシュ装置3をカメラ本体1に取り付けるための取付部38を備えている。
The
図5は、カメラ本体、交換レンズ、フラッシュ装置の電気回路の構成例を示すブロック図である。 FIG. 5 is a block diagram illustrating a configuration example of an electric circuit of the camera body, the interchangeable lens, and the flash device.
図5において、カメラ本体1は、更に、制御部41、シャッタ駆動部42、信号処理回路43、記憶部44、第1のモータドライバ45、第1のモータ46、表示器47、レリーズスイッチ48、ライブビュー開始スイッチ49、記憶部50を備えている。
In FIG. 5, the
制御部41は、カメラ全体の制御を行う。制御部41は、A/Dコンバータ41a、タイマ41b、演算論理ユニット(ALU)41c、ROM41d、RAM41e、シリアル通信ポート(SPI)41f等を内蔵したワンチップマイクロコンピュータから構成されている。また、制御部41は、ROM41dに格納されたプログラムに基づき、図6a、図6b、図7、図8の各フローチャートに示す処理を実行する。ROM41dには、後述するLVL0決定用テーブル(図9)、W(i)値決定用テーブル(図10)が格納されている。
The
シャッタ10、撮像素子12、焦点検出用センサ20、測光用センサ26は、図1等に図示したものと同一である。焦点検出用センサ20及び測光用センサ26の出力信号は、制御部41のA/Dコンバータ41aの入力端子に入力される。シャッタ駆動部42は、制御部41の出力端子に接続されており、シャッタ10を駆動する。
The
信号処理回路43は、制御部41の指示に従って撮像素子12を制御し、撮像素子12から出力される撮像信号をA/D変換しながら入力して信号処理を行い、画像信号を得る。また、信号処理回路43は、得られた画像信号から被写体(人間)の目・口といった特徴を抽出して人間の顔を検出し顔情報(顔位置情報、顔大きさ情報)として得る顔検出機能も有する。また、信号処理回路43は、得られた画像信号を記憶部50に記録するに際して圧縮等の必要な画像処理を行う。
The
記憶部44は、例えばDRAMとして構成されており、信号処理回路43が種々の信号処理を行う際のワーク用メモリとして使われたり、表示器47に画像を表示する際のVRAMとして使われたりする。第1のモータドライバ45は、制御部41の出力端子に接続されており、制御部41の制御に基づき主ミラー13及び第1の反射ミラー14のアップ/ダウンと、シャッタ10のチャージ(シャッタ10を初期位置に戻す動作)を行う。表示器47は、液晶パネルから構成されており、制御部41により点灯が制御されることで各種の撮像画像等を表示する。
The storage unit 44 is configured as a DRAM, for example, and is used as a work memory when the
レリーズスイッチ48は、撮影の際に操作者により操作される。ライブビュー開始スイッチ49は、ライブビュー機能(撮像素子12により撮像されるスルー画像を表示器47にリアルタイムで表示しながら構図確認やピント合わせを行う機能)を開始させる際に操作される。記憶部50は、例えばフラッシュメモリまたは光ディスクとして構成されており、撮像された画像信号を記憶する。
The release switch 48 is operated by an operator at the time of shooting. The live view start switch 49 is operated when starting a live view function (a function for performing composition confirmation and focusing while displaying a through image captured by the
接点部28は、交換レンズ2の接点部32と接触されるものであり、制御部41のシリアル通信ポート41fを経由する入出力信号が接続される。これにより、カメラ本体1と交換レンズ2との間の情報通信が可能となっている。接続部29は、フラッシュ装置3の接続部38と接続されるものであり、制御部41のシリアル通信ポート41fを経由する入出力信号が接続される。これにより、カメラ本体1とフラッシュ装置3との間の情報通信が可能となっている。
The
交換レンズ2は、更に、レンズ制御部51、第2のモータドライバ52、第2のモータ53、第3のモータドライバ54、第3のモータ55、距離エンコーダ56、ズームエンコーダ57を備えている。レンズ制御部51は、シリアル通信ポート(SPI)51a、演算論理ユニット(ALU)51b、ROM51c、RAM51d、タイマ51e等を内蔵したワンチップマイクロコンピュータから構成されている。
The
第2のモータドライバ52は、レンズ制御部51の出力端子に接続されており、レンズ制御部51の制御に基づき焦点調節を行うための第2のモータ53を駆動する。第3のモータドライバ54は、レンズ制御部51の出力端子に接続されており、レンズ制御部51の制御に基づき絞り31の制御を行うための第3のモータ55を駆動する。
The
距離エンコーダ56は、レンズ制御部51の入力端子に接続されており、交換レンズ2内の焦点調節レンズの繰り出し量(焦点調節に伴う撮影レンズの駆動量)、もしくは、焦点調節レンズの焦点調節後の停止位置を測定して、これに関する情報を出力する。即ち、この距離エンコーダ56の情報を入手することにより焦点調節された被写体までの絶対距離に関する情報を得ることができる。焦点調節レンズの相対的な駆動量を出力するタイプのエンコーダ出力の場合には、そのままでは絶対距離に関する情報とはならないが、無限端などのある基準位置を設けてそこからの相対的な駆動量であれば絶対距離に関する情報に換算することができる。
The
ズームエンコーダ57は、レンズ制御部51の入力端子に接続されており、交換レンズ2がズームレンズである場合に撮影時の焦点距離を測定し焦点距離情報を得る。接点部32は、レンズ制御部51のシリアル通信ポート51aを経由する入出力信号が接続される。
The
交換レンズ2がカメラ本体1に装着されると、それぞれの接点部32と接点部28とが接続される結果、交換レンズ2のレンズ制御部51は、カメラ本体1の制御部41とのデータ通信が可能となる。カメラ本体1の制御部41が必要とする情報は、レンズ制御部51から制御部41へデータ通信により出力される。前記情報には、焦点検出や露出演算を行うために必要なレンズ固有の光学的な情報、距離エンコーダ56で測定された被写体までの絶対距離に関する情報、ズームエンコーダ57で測定された焦点距離情報を含む。
When the
また、カメラ本体1の制御部41で処理された情報は、制御部41からレンズ制御部51へデータ通信により出力される。前記情報には、制御部41が焦点検出や露出演算を行った結果求められた焦点調節情報、絞り情報を含む。レンズ制御部51は、カメラ本体1の制御部41から出力された焦点調節情報に従って第2のモータドライバ52を制御し、絞り情報に従って第3のモータドライバ54を制御する。
Information processed by the
フラッシュ装置3は、更に、フラッシュ制御部61、昇圧部62を備えている。発光部34及び発光量センサ37は、図1に図示したものと同一である。フラッシュ制御部61は、演算論理ユニット(ALU)、ROM、RAM、A/Dコンバータ、シリアル通信ポート(SPI)(以上不図示)等を内蔵したワンチップマイクロコンピュータから構成されている。昇圧部62は、発光部34の発光に必要な300V程度の高圧電圧を作りその高圧電圧を充電する機能を有する。
The
フラッシュ装置3がカメラ本体1に装着されると、それぞれの接続部38と接続部29とが接続される結果、フラッシュ装置3のフラッシュ制御部61は、カメラ本体1の制御部41とのデータ通信が可能となる。フラッシュ制御部61は、カメラ本体1の制御部41からの通信内容に従って昇圧部62を制御することで発光部34の発光開始/発光停止を行うと共に、発光量センサ37の検出量をカメラ本体1の制御部41に対して出力する。
When the
次に、上記構成を有する本実施の形態のカメラの動作について図6a〜図10を参照しながら説明する。 Next, the operation of the camera of the present embodiment having the above configuration will be described with reference to FIGS.
図6a、図6bは、カメラにおける本発明に関わる具体的な動作シーケンスを示すフローチャートである。 6a and 6b are flowcharts showing a specific operation sequence related to the present invention in the camera.
図6a、図6bにおいて、カメラの電源スイッチ(不図示)が操作者によりオンされると、カメラ本体1の制御部41が動作可能となり本処理が開始される。
6a and 6b, when a power switch (not shown) of the camera is turned on by the operator, the
ステップS101において、制御部41は、フラッシュ装置3のフラッシュ制御部61と通信を行い、昇圧部62を動作させて発光部34(フラッシュ)の発光に十分な高圧電圧を発生するための充電を行うように指示する。
In step S101, the
次にステップS102において、制御部41は、交換レンズ2のレンズ制御部51と通信を行い、測距や測光に必要な交換レンズ2を構成する各種レンズの情報を得る。
In step S102, the
次にステップS103において、制御部41は、ライブビュー開始スイッチ(LVSW)49が操作者によりオンされているかどうかをチェックする。ライブビュー開始スイッチ49がオンされていない場合は、ステップS104へ進む。
In step S103, the
次にステップS104において、制御部41は、前回の撮影時においてRAM41eに記憶された撮像画面における人物被写体の顔の位置の座標を示す顔位置情報及び人物被写体の顔の大きさを示す顔大きさ情報をクリアする。その理由は、顔位置情報及び顔大きさ情報はライブビュー開始スイッチ49がオンされてライブビュー動作が開始された場合に有効な情報となるが、そうでない場合は意味を持たないためである。
Next, in step S104, the
次にステップS105において、制御部41は、焦点検出用センサ20に対して制御信号を出力し、焦点検出用センサ20における焦点検出に伴う信号蓄積部に対する信号の蓄積を行う。制御部41は、信号の蓄積が終了すると、焦点検出用センサ20の信号蓄積部に蓄積された信号を読み出しながらA/D変換を行う。更に、制御部41は、A/D変換された各デジタルデータに対してシェーディング補正等の必要な各種のデータ補正を行う。
Next, in step S <b> 105, the
次にステップS106において、制御部41は、焦点検出を行うために必要なレンズ情報等をレンズ制御部51から入力し、レンズ情報と焦点検出用センサ20から得られているデジタルデータを基に撮像画面各部の焦点状態を演算する。更に、制御部41は、撮像画面内の焦点を合わせるべき領域を焦点検出位置S0〜S2(図4)の中から決定する。操作者により予め操作部材等により指定されている領域があるならばそれに従ってもよい。制御部41は、決定された領域における焦点状態に従って合焦となるためのレンズ移動量を算出し、算出されたレンズ移動量をレンズ制御部51に出力する。
In step S106, the
レンズ制御部51は、レンズ移動量に従って焦点調節用レンズを駆動するように第2のモータドライバ52に駆動信号を出力することで、第2のモータ53を駆動する。これにより、撮影レンズは被写体に対して合焦状態となる。焦点調節用レンズを駆動することで距離エンコーダ56により測定される情報が変化し、焦点調節された被写体までの絶対距離情報が判るようになる。よって、制御部41はレンズ制御部51と通信を行い各種レンズの情報の更新も行う。
The
次にステップS107において、制御部41は、測光用センサ26から35分割された各受光部PD1〜PD35(図3)の信号を読み出しながらA/D変換を行い、撮像画面各部の輝度情報を入力する。更に、制御部41は、必要なレンズ情報等をレンズ制御部51から入力し、撮像画面各部の輝度情報の補正を行い、測光用センサ26の各受光部毎の被写体輝度情報を得る。
Next, in step S107, the
次にステップS108において、制御部41は、得られた測光用センサ26の各受光部毎の被写体輝度情報から、焦点検出用センサ20による焦点検出部分に対応した測光用センサ26の各受光部の輝度情報に重み付けを置いて撮像画面全体の輝度を算出する。制御部41は、このようにして算出された撮像画面全体の輝度情報に基づいて撮影に適する撮像素子12の電荷蓄積時間(即ちシャッタ速度)と絞り値を規定のプログラム線図(不図示)から決定し、表示器47に表示する。シャッタ速度または絞り値の一方が予めプリセットされている場合は、そのプリセット値と組み合わせて良好な露出となる他方の因子を決定する。
Next, in step S108, the
尚、決定されたシャッタ速度と絞り値とのアペックス値に基づく露出値をEVTと呼ぶこととする。露出値EVTは下記の式で表される。 The exposure value based on the apex value between the determined shutter speed and aperture value is referred to as EVT. The exposure value EVT is expressed by the following formula.
EVT=Tv+Av
ここで、Tvはシャッタ速度のアペックス値、Avは絞り値のアペックス値である。
EVT = Tv + Av
Here, Tv is the apex value of the shutter speed, and Av is the apex value of the aperture value.
次にステップS109において、制御部41は、レリーズスイッチ48が操作者によりオンされるのを待つ。レリーズスイッチ48がオンされていない場合は、ステップS102に戻る。レリーズスイッチ48がオンされた場合は、ステップS117に進む。
Next, in step S109, the
他方、上記ステップS103でライブビュー開始スイッチ49がオンされている場合は、ステップS110へ進む。ステップS110において、制御部41は、第1のモータドライバ45に制御信号を出力することで第1のモータ46を駆動し、主ミラー13及び第1の反射ミラー14を上方に跳ね上げる。
On the other hand, if the live view start switch 49 is turned on in step S103, the process proceeds to step S110. In step S <b> 110, the
次にステップS111において、制御部41は、シャッタ駆動部42に対して制御信号を出力することでシャッタ10を開放状態とする。これにより、撮像素子12には撮影レンズからの光線が入射して撮像が可能となる。続いて、制御部41は、撮像素子12により撮像動作を行うように信号処理回路43に対して指示を出す。制御部41は、撮像動作が開始されると、得られた撮像画像を表示器47に表示するように制御する。こうしてライブビュー動作が開始される。
Next, in step S111, the
次にステップS112において、制御部41は、表示器47に表示されるライブビュー画像の明るさや色合いが適切なものとなるように、撮像された画像データから露出(AE)制御やホワイトバランス(WB)制御のためのデータを入手する。更に、制御部41は、入手したデータを基に撮像素子12の電荷蓄積時間や色処理の補正を行う。露出制御用のデータからは本撮像時の露出値EVTも演算される。必要に応じてシャッタ速度や絞り値といった露出制御データもステップS108と同様に演算される。
Next, in step S112, the
次にステップS113において、制御部41は、信号処理回路43により撮像画像から顔検出処理を行う。顔検出処理では、特開2005−184508号公報に記載されているように、画像データの中から目と口の特徴エッジを抽出して人物の顔位置を検知し、更に目と口を包含する輪郭を検出し、その重心位置を求めると共に輪郭内の領域の輝度を算出する。更に、算出された重心位置に基づいて撮像画面内の顔位置情報を求め、輪郭情報から顔大きさ情報を求める。
Next, in step S <b> 113, the
次にステップS114において、制御部41は、信号処理回路43で求められた顔位置情報及び顔大きさ情報を入手し、RAM41eに格納する。尚、顔位置情報は、撮像画面内の例えば中央或いは左上端といった所定のポイントを原点としたx座標、y座標のようなものでよい。また、顔大きさ情報は、顔領域が広がる範囲を示すデータとして、顔位置情報を中心とした円の半径を表すデータ或いは正方形の一辺の長さデータといったものでよい。
Next, in step S114, the
次にステップS115において、制御部41は、レリーズスイッチ48が操作者によりオンされるのを待つ。レリーズスイッチ48がオンされていない場合は、ステップS112に戻り、ステップS112〜ステップS114の処理を繰り返す。レリーズスイッチ48がオンされている場合は、ステップS116に進む。
Next, in step S115, the
次にステップS116において、制御部41は、シャッタ駆動部42に対して制御信号を出力することでシャッタ10を閉じてライブビュー動作を終了する。続いて、制御部41は、第1のモータドライバ45に制御信号を出力することで第1のモータ46を駆動し、主ミラー13及び第1の反射ミラー14を跳ね上げ状態から一度ダウンさせると共にシャッタ10をチャージする。
Next, in step S116, the
次にステップS117において、制御部41は、測光用センサ26から35分割された各受光部PD1〜PD35の信号を読み出しながらA/D変換を行い、撮像画面各部のプリ発光(予備発光)直前の輝度情報を入力する。ここで、測光用センサ26の各受光部毎のプリ発光直前の輝度情報(輝度値)をP(i)と呼ぶこととする。続いて、制御部41は、フラッシュ制御部61と通信を行い、発光部34(フラッシュ)のプリ発光を指示する。
Next, in step S117, the
これにより、フラッシュ制御部61は、発光量センサ37の出力信号に基づき発光部34が予め設定されたプリ発光量だけ発光するように発光部34を発光させる。このプリ発光が行われている間の被写体の輝度情報を得るために、制御部41は、測光用センサ26から35分割された各受光部PD1〜PD35の信号を読み出しながらA/D変換を行い、撮像画面各部のプリ発光時輝度情報を入力する。ここで、測光用センサ26の各受光部毎のプリ発光時の輝度情報(輝度値)をH(i)と呼ぶこととする。尚、ここでiは35分割された各受光部に対応した1〜35のことである。
Accordingly, the
次にステップS118において、制御部41は、発光部34(フラッシュ)の本発光量(本発光ゲイン)を決定する演算を行う。具体的な演算処理については図7のフローチャートを用いて後述する。
Next, in step S118, the
次にステップS119において、制御部41は、第1のモータドライバ45に制御信号を出力することで第1のモータ46を駆動し、主ミラー13及び第1の反射ミラー14を上方に跳ね上げる。続いて、制御部41は、上記ステップS107にて演算された絞り値情報を交換レンズ2のレンズ制御部51に対して出力する。
Next, in step S119, the
レンズ制御部51は、絞り値情報に従って絞り31を駆動するように第3のモータドライバ54に制御信号を出力することで第3のモータ55を駆動する。これにより、撮影レンズは絞り込み状態となる。
The
次にステップS120において、制御部41は、シャッタ駆動部42に対して制御信号を出力することでシャッタ10を開放状態とする。これにより、撮像素子12には撮影レンズからの光線が入射して撮像が可能となる。続いて、制御部41は、上記ステップS107にて演算されたシャッタ時間に従って撮像素子12の電荷蓄積時間を設定して撮像素子12により撮像を行うように、信号処理回路43に対して指示を出す。また、制御部41は、撮像タイミングに同期してフラッシュ装置3のフラッシュ制御部61に対して発光部34(フラッシュ)の発光指示を与える。
In step S120, the
フラッシュ制御部61は、発光指示に従って、上記ステップS118にて演算された本発光量(本発光ゲイン)に対応する発光量となるように、発光量センサ37の出力信号に基づき発光部34を発光させる。これにより、フラッシュ発光を伴った撮像が行われる。撮像が終了すると、制御部41は、シャッタ駆動部42に対して制御信号を出力することでシャッタ10を遮光状態とする。これにより、撮像素子12に対する撮影レンズからの光線が遮断される。
The
次にステップS121において、制御部41は、交換レンズ2のレンズ制御部51に対して絞り31を開放するように情報を出力する。レンズ制御部51は、この情報に従って絞り31を駆動するように第3のモータドライバ54に制御信号を出力することで第3のモータ55を駆動する。これにより、撮影レンズは絞り開放状態となる。更に、制御部41は、第1のモータドライバ45に制御信号を出力することで第1のモータ46を駆動し、主ミラー13及び第1の反射ミラー14をダウンさせる。
Next, in step S <b> 121, the
次にステップS122において、制御部41は、撮像画像情報を撮像素子12からA/D変換しながら読み出し、必要な補正処理や補間処理を行うように信号処理回路43に対して指示を出す。
Next, in step S122, the
次にステップS123において、制御部41は、信号処理回路43に対して指示を出して撮像画像情報に対してホワイトバランス調整を行う。具体的には、撮像画像情報において1画面内を複数に分割し、各領域毎の色差信号から被写体の白色領域を抽出する。更に、抽出された白色領域の信号に基づいて撮像画面全体の赤チャンネル及び青チャンネルのゲイン補正を行いホワイトバランス調整を行う。
Next, in step S123, the
次にステップS124において、制御部41は、ホワイトバランス調整が行われた撮像画像情報を記録ファイルフォーマットに圧縮変換して記憶部44に記憶するように信号処理回路43に対して指示を出す。ステップS101〜124で一連の撮影シーケンスが終了する。
In step S <b> 124, the
次に、上記図6bのステップS118で行う発光部34(フラッシュ)の本発光量(本発光ゲイン)を決定する演算処理について図7のフローチャートに従って説明する。 Next, calculation processing for determining the main light emission amount (main light emission gain) of the light emitting unit 34 (flash) performed in step S118 of FIG. 6B will be described with reference to the flowchart of FIG.
図7、図8は、発光部の本発光量(本発光ゲイン)を決定する演算処理の詳細を示すフローチャートである。 7 and 8 are flowcharts showing details of calculation processing for determining the main light emission amount (main light emission gain) of the light emitting unit.
図7、図8において、ステップS151では、制御部41は、測光用センサ26の各測光エリア(測光領域)毎にプリ発光直前の輝度値P(i)とプリ発光時の輝度値H(i)とから、プリ発光時の反射光分のみの輝度値(被写体反射光量)D(i)を算出する。プリ発光直前の輝度値P(i)とプリ発光時の輝度値H(i)とはそれぞれ圧縮系での値であるため、下式で示すようにP(i)とH(i)とのべき乗をとって伸長させてから差分をとり、差分値を対数圧縮する演算を行う。
7 and 8, in step S151, the
D(i)=log2(2H(i)−2P(i))
ここで、iは35分割された測光用センサ26の各受光部(測光エリア)に対応した1〜35のことである。
D (i) = log 2 (2 H (i) −2 P (i) )
Here, i is 1 to 35 corresponding to each light receiving portion (photometric area) of the
次にステップS152において、制御部41は、測光用センサ26の各測光エリア毎にプリ発光直前の輝度値P(i)とプリ発光時の輝度値H(i)とから、下式で示すように輝度値の比R(i)を演算する。
Next, in step S152, the
R(i)=H(i)−P(i)
プリ発光直前の輝度値P(i)とプリ発光時の輝度値H(i)とはそれぞれ圧縮系での値であるため、この差分をとることは輝度値の比をとることと等価である。
R (i) = H (i) -P (i)
Since the luminance value P (i) immediately before the pre-emission and the luminance value H (i) at the time of the pre-emission are values in the compression system, taking this difference is equivalent to taking the ratio of the luminance values. .
輝度値の比を求める理由は、特開2005−275265号公報に記載されているように、35分割された測光用センサ26の各測光エリアにおいて輝度値の比の値が一致する測光エリアは被写体までの距離が一致する測光エリアとみなせることによる。
The reason for obtaining the ratio of the luminance values is that, as described in Japanese Patent Application Laid-Open No. 2005-275265, the photometric area in which the ratio of the luminance values matches in each photometric area of the
次にステップS153において、制御部41は、被写体の距離に関する情報から下式で示すように所定値LVL0及びLVL1を演算する。LVL0は、上記ステップS102或いはステップS106にてレンズ制御部51から得られる距離エンコーダ56の情報(被写体までの物体距離に関する情報D)と、プリ発光時の発光光量に関する情報C2とから、次のように計算する。即ち、その距離における標準的な反射率の被写体の場合の反射輝度を考慮して計算する。
Next, in step S153, the
LVL0は、被写体までの物体距離に関する情報D(以下、距離情報Dと略記)での標準的な反射率の被写体の反射輝度よりも少し高くなるように決める。これは、距離情報Dが実際は多少の誤差を持つことを考慮して、その誤差分の程度だけLVL0を高くしておき、実際の標準的な反射率の被写体におけるプリ発光時の反射光がLVL0よりも高くならないようにするためである。 LVL0 is determined to be slightly higher than the reflection luminance of the subject with a standard reflectance in the information D (hereinafter, abbreviated as distance information D) regarding the object distance to the subject. In consideration of the fact that the distance information D actually has some errors, LVL0 is increased by an amount corresponding to the error, and the reflected light at the time of pre-emission in the subject having the actual standard reflectance is LVL0. This is to prevent the height from becoming higher.
LVL0=−log2(D)×2+C2
一方、LVL1は、LVL0に対してC3を減じて決定される。C3は実際の標準的な反射率の被写体のプリ発光時の反射光がLVL1を下回らないように、距離情報Dの誤差等を考慮して決定される。
LVL0 = −log 2 (D) × 2 + C2
On the other hand, LVL1 is determined by subtracting C3 from LVL0. C3 is determined in consideration of an error of the distance information D and the like so that the reflected light at the time of pre-emission of the subject having an actual standard reflectance does not fall below LVL1.
LVL1=LVL0−C3
このように、距離情報Dから通常は被写体のプリ発光時の反射光は所定値LVL0とLVL1の間に入る前提で以下のフラッシュ本発光量を決定するための演算が行われる。
LVL1 = LVL0-C3
As described above, the following calculation for determining the flash main light emission amount is performed on the assumption that the reflected light during the pre-emission of the subject normally falls between the predetermined values LVL0 and LVL1 from the distance information D.
尚、レンズ交換可能な一眼レフタイプのカメラの場合には、カメラ本体に装着されたレンズによっては距離エンコーダ56を装備していないために距離情報Dは得られないといったこともある。ここで、レンズが距離エンコーダ56を装備していない場合の所定値LVL0及びLVL1の算出方法を記す。
In the case of a single-lens reflex camera with interchangeable lenses, the distance information D may not be obtained because the
まず、LVL0は撮影レンズの焦点距離情報に基づいて図9に示すLVL0決定用テーブル(table1)を参照して決定する。 First, LVL0 is determined with reference to the LVL0 determination table (table1) shown in FIG. 9 based on the focal length information of the taking lens.
LVL0=table1(f)
LVL0決定用テーブルは、撮影レンズの焦点距離(f)とLVL0との対応関係を示すテーブルである。
LVL0 = table1 (f)
The LVL0 determination table is a table showing the correspondence between the focal length (f) of the photographic lens and LVL0.
例えば撮影レンズの焦点距離(f)が28mmであれば(f<40mm)、0.5mの距離に標準的な反射率の被写体があった場合の反射輝度(0.5mにおける標準反射光)をLVL0とする。一般的に焦点距離28mmの撮影レンズを使って撮影を行う場合に、0.5mよりも近距離の被写体を撮影する頻度は極めて低いことから、殆どの場合に実際のプリ発光時の反射光量としてはLVL0よりも低くなる。 For example, if the focal length (f) of the photographic lens is 28 mm (f <40 mm), the reflection luminance (standard reflected light at 0.5 m) when a subject having a standard reflectance is located at a distance of 0.5 m. LVL0. In general, when photographing using a photographing lens having a focal length of 28 mm, the frequency of photographing a subject at a short distance of 0.5 m is extremely low. Becomes lower than LVL0.
以下同様に、焦点距離50mmの撮影レンズであれば0.8mの距離に標準的な反射率の被写体があった場合の反射輝度をLVL0とするという考え方で、図8のLVL0決定用テーブルは構成されている。撮影レンズの焦点距離に対してはある程度のステップで区切る方が合理的なので、LVL0決定用テーブルではそのように焦点距離を区切っている。 Similarly, the LVL0 determination table in FIG. 8 is configured based on the idea that the reflection luminance is LVL0 when an object with a standard reflectance is located at a distance of 0.8 m in the case of a photographing lens with a focal length of 50 mm. Has been. Since it is more reasonable to divide the focal length of the photographic lens in a certain amount of steps, the focal length is divided as such in the LVL0 determination table.
一方、距離情報Dが得られない場合のLVL1はLVL0からC1を減じて算出される。C1は経験則的に被写体からのプリ反射光量がLVL1よりも下回ることは無いように決められる。例えば焦点距離50mmの撮影レンズでフラッシュ撮影する場合に、被写体から6.4mより遠くに離れて撮影する確率は極めて低いとすれば、LVL0を決定する際の距離0.8mの場合に対して被写体からの反射光は6段低くなるのでC1は6とする。 On the other hand, LVL1 when distance information D is not obtained is calculated by subtracting C1 from LVL0. As a rule of thumb, C1 is determined so that the amount of pre-reflected light from the subject does not fall below LVL1. For example, when flash photography is performed with a photographing lens having a focal length of 50 mm, if the probability of photographing farther than 6.4 m from the subject is extremely low, the subject is compared to the case where the distance is 0.8 m when determining LVL0. Since the reflected light from the light source is 6 steps lower, C1 is set to 6.
LVL1=LVL0−C1
LVL0及びLVL1は共に圧縮系での値である。
LVL1 = LVL0-C1
Both LVL0 and LVL1 are values in the compression system.
次にステップS154において、制御部41は、測光用センサ26における35分割された測光エリアの中から、輝度値D(i)が所定値LVL0とLVL1との間に入っている領域を抽出する。これにより、ガラス等の鏡面物体からの正反射により輝度値D(i)が異常に高くなっている測光エリアや、発光部34のフラッシュ光が届かないくらいに距離が離れているために輝度値D(i)が非常に低くなっている測光エリアが除外される。その結果、主被写体が存在しそうな測光エリアが抽出される。
Next, in step S154, the
尚、プリ発光時の輝度値H(i)の値は輝度値D(i)の値と大きく変わらないことが多いので(プリ発光直前の輝度値P(i)が小さい場合が多いので)、該ステップS154では輝度値D(i)の代わりにプリ発光時の輝度値H(i)を使用してもよい。 Note that the value of the luminance value H (i) at the time of pre-light emission is not much different from the value of the luminance value D (i) (because the luminance value P (i) immediately before the pre-light emission is often small), In step S154, the luminance value H (i) at the time of pre-emission may be used instead of the luminance value D (i).
次にステップS155において、制御部41は、抽出された測光エリアの中で一番近距離にある被写体が主被写体である可能性が高いので、次のように基準エリアを選択する。即ち、上述したプリ発光直前(予備発光動作の前)の輝度値P(i)(第1の輝度値)と、プリ発光時(予備発光動作中)の輝度値H(i)(第2の輝度値)との比R(i)が最大値となっている測光エリアを基準エリアとして選択する。その基準エリアにおけるR(i)の値を基準値BaseR(基準となる比の値)と呼び、基準値BaseRとR(i)の値が同一の値を示している測光エリアを主被写体エリアとする。
Next, in step S155, the
次にステップS156において、制御部41は、測光用センサ26におけるi=1〜35の全ての測光エリアにおいて下式で示すように輝度値の比R(i)と基準値BaseRとの差RR(i)を算出する。
Next, in step S156, the
RR(i)=baseR−R(i)
輝度値の比R(i)と基準値BaseRとは共に圧縮系での値なので、RR(i)は基準エリアのR(i)とその他の測光エリアのR(i)との比を算出していることになる。RR(i)の値が小さくなる測光エリアというのは、主被写体エリアであると想定し基準値BaseRとなった測光エリアの被写体と略等価な距離に被写体が存在する測光エリアである。
RR (i) = baseR−R (i)
Since both the luminance value ratio R (i) and the reference value BaseR are values in the compression system, RR (i) calculates the ratio of R (i) in the reference area and R (i) in the other photometric areas. Will be. The photometric area in which the value of RR (i) is small is a photometric area in which the subject exists at a distance approximately equivalent to the subject in the photometric area that is assumed to be the main subject area and has the reference value BaseR.
一方、RR(i)の値が正の方向に大きくなる測光エリアというのは、主被写体エリアであると想定し基準値BaseRとなった測光エリアの被写体よりも遠くに離れていた被写体が存在していると見なせる測光エリアである。逆に、RR(i)の値が負の方向に大きくなる測光エリアというのは、主被写体エリアであると想定し基準値BaseRとなった測光エリアの被写体よりも近くにあると見なせる測光エリアである。 On the other hand, the photometric area where the value of RR (i) increases in the positive direction is assumed to be the main subject area, and there is a subject that is farther away than the subject in the photometric area that has the reference value BaseR. This is a photometric area that can be regarded as Conversely, the photometric area in which the value of RR (i) increases in the negative direction is a photometric area that is assumed to be the main subject area and can be regarded as being closer to the subject in the photometric area having the reference value BaseR. is there.
即ち、こうした測光エリアは、被写体において主被写体以外に手前に障害物が存在する測光エリアや、ガラス等の鏡面による正反射が発生して異常に高い反射光量が得られた測光エリアであると考えられる。 That is, such a photometric area is considered to be a photometric area in which an object has an obstacle in front of it other than the main subject, or a photometric area in which specular reflection by a mirror surface such as glass occurs and an abnormally high amount of reflected light is obtained. It is done.
次にステップS157において、制御部41は、測光用センサ26におけるi=1〜35の全ての測光エリアにおいて算出されたRR(i)に応じて重み付け係数W(i)を決定する。具体的には、各測光エリアのRR(i)の値より図10に示すW(i)値決定用テーブル(table2)を参照して下式で示すようにW(i)を求める。
Next, in step S157, the
W(i)=table2(RR(i))
W(i)値決定用テーブルは、RR(i)とW(i)との対応関係を示すテーブルである。
W (i) = table2 (RR (i))
The W (i) value determination table is a table showing the correspondence between RR (i) and W (i).
W(i)値決定用テーブルによれば、RR(i)の値が基準値BaseRとなった測光エリアが重み付け上の最大値12がW(i)として与えられる。RR(i)の値が基準値BaseRと同一またはごく近い値となった測光エリアほどW(i)は高い値が与えられる。このような領域は主被写体領域または主被写体とほぼ同一距離の被写体とみなしているからである。
According to the W (i) value determination table, the photometric area in which the value of RR (i) becomes the reference value BaseR is given the
RR(i)値の絶対値が0から大きくなるに従ってその測光エリアに与えられる重み付け係数W(i)は徐々に小さくなる。これは、主被写体であると仮定した測光エリアの被写体とは異なる被写体領域である可能性が高くなるからである。 As the absolute value of the RR (i) value increases from 0, the weighting coefficient W (i) given to the photometric area gradually decreases. This is because there is a high possibility that the subject area is different from the subject in the photometry area assumed to be the main subject.
このように、各測光エリア毎に存在する被写体までの距離に応じて重み付け係数を与えて次ステップ以降による本発光量の演算を行う。これにより、撮影毎に撮像画面内での主被写体位置が移動している場合や同一シーンを少しだけ構図を変えて撮影した場合などにおいても、略同様な本発光量を演算できるため、1枚毎に異なる露出結果になることを防止することができる。 In this way, the light emission amount is calculated in the subsequent steps by giving a weighting coefficient according to the distance to the subject existing in each photometric area. As a result, even when the main subject position in the imaging screen is moved every time shooting is performed, or when the same scene is shot with a slightly different composition, the same amount of main light emission can be calculated. It is possible to prevent different exposure results from being obtained.
次にステップS158において、制御部41は、下式で示すように測光用センサ26におけるi=1〜35の全ての測光エリアの被写体の反射光の重み付け演算を行う。
Next, in step S158, the
AVE=Σ(D(i)×W(i))/ΣW(i)
この重み付け演算により、主被写体エリアと見なした測光エリアと同一距離の被写体であると想定される測光エリアほど重み付けが大きくなった撮像画面全体の反射光の重み付け平均値AVEが算出される。
AVE = Σ (D (i) × W (i)) / ΣW (i)
By this weighting calculation, the weighted average value AVE of the reflected light of the entire imaging screen in which the weighting is larger in the metering area that is assumed to be the subject having the same distance as the metering area regarded as the main subject area is calculated.
次にステップS159において、制御部41は、上記ステップS153にてレンズ制御部51から距離エンコーダ56の情報が得られているかどうかをチェックする。本実施の形態のように交換レンズ2が距離エンコーダ56を装備し、被写体までの絶対距離に関する情報としての距離エンコーダ56で測定された距離情報D(焦点調節レンズの繰り出し量に対応)が入手できている場合は、ステップS160へ進む。
Next, in step S159, the
次にステップS160において、制御部41は、距離情報Dから所定値LVL2(基準反射光量)を下式で示すように演算する。LVL2は、上記ステップS153と同様にレンズ制御部51から得られる距離エンコーダ56で測定された距離情報Dと、プリ発光時の発光光量に関する情報C4とから、その距離における標準的な反射率の被写体の場合の反射輝度を考慮して計算する。
Next, in step S160, the
LVL2は、距離情報Dでの標準的な反射率の被写体の反射輝度とほぼ一致するように決める。これは、距離情報Dが被写体までの実際の距離(実距離)と一致している場合に正確な本発光量を演算可能とするためである。 LVL2 is determined so as to substantially match the reflection luminance of the subject having a standard reflectance in the distance information D. This is because when the distance information D matches the actual distance (actual distance) to the subject, an accurate main light emission amount can be calculated.
LVL2=−log2(D)×2+C4
次にステップS161において、制御部41は、顔位置情報及び顔大きさ情報が入手できているかどうかをチェックする。ライブビュー動作が開始されて上記ステップS114の処理が実行されている場合は、顔位置情報及び顔大きさ情報が入手できている。そうでない場合は、上記ステップS104にて顔位置情報及び顔大きさ情報はクリアされているので顔位置情報及び顔大きさ情報が入手できてはいないことになる。顔位置情報及び顔大きさ情報が入手できている場合にはステップS162へ進む。
LVL2 = −log 2 (D) × 2 + C4
Next, in step S161, the
次にステップS162において、制御部41は、信号処理回路43で検出されている顔大きさ情報と、レンズ制御部51から得られている撮影レンズの焦点距離情報とに基づき、被写体までの物体距離Dfを演算する。ここで、撮影レンズの焦点距離情報をFL、検出されている顔大きさ情報をWfとし、実際の人物の顔の大きさなどで決定される変換係数をK1とすると、物体距離Dfは下式により演算される。
Next, in step S162, the
Df=FL×K1÷Wf
実際の人物の顔の大きさには年齢や個人差などは当然あるが、生命工学工業技術研究所による設計のための人体寸法データ集によれば、日本人の平均的な頭幅は162mmとされている。他方、Humancale Published by The MIT Pressによれば、米国人(男)の平均的な頭幅は155mmとされている。こうした統計情報から、実際の人物の顔の大きさ(幅)は150〜160mmである前提で変換係数K1を決定すればよい。
Df = FL × K1 ÷ Wf
The actual size of a person's face naturally depends on age and individual differences, but according to the collection of human body size data for design by the Institute of Biotechnology, the average Japanese head width is 162 mm. Has been. On the other hand, according to Humancale Published by The MIT Press, the average head width of an American (male) is 155 mm. From such statistical information, the conversion coefficient K1 may be determined on the assumption that the face size (width) of an actual person is 150 to 160 mm.
尚、顔大きさ情報が所定値以下の場合は、検出精度が低い恐れがある。また、顔大きさ情報が所定値以上で且つ顔位置情報が撮像画面内の周辺部に位置している場合は、撮像画面から顔がはみ出している可能性が考えられ、やはり顔大きさ情報の精度に誤差が大きい可能性がある。こうした場合にはDfの演算を行わずに例えばDf=0としておく。 If the face size information is less than or equal to a predetermined value, the detection accuracy may be low. Also, if the face size information is greater than or equal to a predetermined value and the face position information is located in the periphery of the image capture screen, there is a possibility that the face protrudes from the image capture screen. There may be a large error in accuracy. In such a case, for example, Df = 0 is set without calculating Df.
次にステップS163において、制御部41は、レンズ制御部51から得られる距離エンコーダ56で測定された距離情報Dと、上記ステップS162にて演算された物体距離Dfとの比率DSを下式により計算する。
Next, in step S163, the
DS=D÷Df
尚、Df=0の場合は上記の計算はできないので、DS=255などの所定以上の固定値を与える。
DS = D ÷ Df
Since the above calculation cannot be performed when Df = 0, a fixed value greater than a predetermined value such as DS = 255 is given.
次にステップS164において、制御部41は、比率DSの値が所定値以内かどうかをチェックする。比率DSが例えば0.9〜1.1の範囲内にある場合を所定値以内とする。即ち、距離エンコーダ56で測定された距離情報Dと、顔大きさ情報から演算された物体距離Dfが10%以内の精度で合致している場合である。比率DSの値が所定値以内の場合は、被写体までの距離に関する情報Dが実際の被写体までの距離(撮影距離)に対して誤差が非常に少ない状況であると考えられるため、ステップS165へ進む。
Next, in step S164, the
次にステップS165において、制御部41は、距離情報Dによる反射光量の補正値DCを下式により算出する。
Next, in step S165, the
DC=(LVL2−AVE)×0.7
ここで、LVL2は上記ステップS160にて演算した距離情報Dから算出した基準反射光量であり、AVEは上記ステップS158にて演算したプリ発光時の全測光エリアの重み付け平均値である。
DC = (LVL2-AVE) × 0.7
Here, LVL2 is a reference reflected light amount calculated from the distance information D calculated in step S160, and AVE is a weighted average value of all photometric areas during pre-emission calculated in step S158.
上記ステップS164にて比率DSの値が所定値以内ではなかった場合は、制御部41は、距離情報Dが実際の被写体までの撮影距離に対してある程度誤差を持っていると見なしてステップS166へ進む。また、上記ステップS161にて顔位置情報及び顔大きさ情報が入手できていない場合は、距離情報Dが実際の被写体までの距離に対して誤差が少ないか多いか判定ができない。そのため、制御部41は、上記と同様にある程度誤差を持っていると見なしてステップS166へ進む。
When the value of the ratio DS is not within the predetermined value in step S164, the
次にステップS166において、制御部41は、距離情報Dによる反射光量の補正値DCを下式により算出する。
Next, in step S166, the
DC=(LVL2−AVE)×0.3
ここで、LVL2は上記ステップS160にて演算した距離情報Dから算出した基準反射光量であり、AVEは上記ステップS158にて演算したプリ発光時の全測光エリアの重み付け平均値である。
DC = (LVL2-AVE) × 0.3
Here, LVL2 is a reference reflected light amount calculated from the distance information D calculated in step S160, and AVE is a weighted average value of all photometric areas during pre-emission calculated in step S158.
尚、上記ステップS159にて交換レンズ2が距離エンコーダ56を装備しておらず被写体までの距離情報としての距離エンコーダ56の情報Dが入手できない場合は、ステップS167へ進む。ステップS167において、制御部41は、被写体までの距離情報Dによる反射光量の補正値DCを算出できないのでDC=0とする。
If the
上記ステップS165、ステップS166、ステップS167の何れかの処理が終了するとステップS168へ進む。ステップS168において、制御部41は、ステップS108またはステップS112で決定されたEVT、ステップS158で演算されたAVE、ステップS165〜ステップS167の何れかで演算されたDCから本発光の発光量Gを下式により演算する。
When one of the processes in step S165, step S166, and step S167 is completed, the process proceeds to step S168. In step S168, the
G=EVT−AVE−DC
Gはプリ発光時の発光部34によるフラッシュ発光量に対する本発光の相対値となる。
G = EVT-AVE-DC
G is a relative value of the main light emission with respect to the flash light emission amount by the
ステップS165からステップS168へ進んだ場合には、被写体までの距離情報Dから算出した基準反射光量LVL2と、プリ発光時の全測光エリアの重み付け演算値AVEとの差分の70%が、補正量DCとなっている。この場合は被写体までの距離情報としての距離エンコーダ56の情報Dがかなり正確であると判定している場合である。従って、本発光量Gは距離情報Dから算出した基準反射光量LVL2に依存する割合が70%、プリ発光時の全測光エリアの重み付け演算値AVEに依存する割合が30%となる。これにより、距離エンコーダ56の情報Dに70%の比重を置いて本発光量Gが決定される。
When the process proceeds from step S165 to step S168, 70% of the difference between the reference reflected light amount LVL2 calculated from the distance information D to the subject and the weighted calculation value AVE of all photometric areas at the time of pre-flash is the correction amount DC. It has become. In this case, the information D of the
ステップS166からステップS168へ進んだ場合には、被写体までの距離情報Dから算出した基準反射光量LVL2と、プリ発光時の全測光エリアの重み付け演算値AVEとの差分の30%が補正量DCとなっている。この場合は被写体までの距離情報としての距離エンコーダ56の情報Dがある程度誤差を持っていると判定している場合である。従って、本発光量Gは距離情報Dから算出した基準反射光量LVL2に依存する割合が30%、プリ発光時の全測光エリアの重み付け演算値AVEに依存する割合が70%となる。これにより、プリ発光時の全測光エリアの重み付け演算値AVEに70%の比重を置いて本発光量Gが決定される。
When the process proceeds from step S166 to step S168, 30% of the difference between the reference reflected light amount LVL2 calculated from the distance information D to the subject and the weighted calculation value AVE of all photometry areas at the time of pre-flash is the correction amount DC. It has become. In this case, the information D of the
ステップS167からステップS168へ進んだ場合には、被写体までの距離情報としての距離エンコーダ56の情報Dが無い場合である。従って、被写体までの距離情報Dによる反射光量の補正値DCは0である。これにより、プリ発光時の全測光エリアの重み付け演算値AVEに100%の比重を置いて本発光量Gが決定される。
When the process proceeds from step S167 to step S168, there is no information D of the
本発光量Gの値はカメラ本体1の制御部41からフラッシュ装置3の制御部61に通信により送られ、上記ステップS120にて本発光量に基づき発光部34による本発光が行われる。これにより、所望のフラッシュ撮像が行われる。
The value of the main light emission amount G is transmitted by communication from the
尚、上記ステップS164にて所定値を0.9以上1.1以内と設定し、ステップS165にて補正値DCを算出する係数を0.7と設定し、ステップS166にて補正値DCを算出する係数を0.3と設定したのは何れも一例である。本発明はこれらの数値に限定されるものではない。 In step S164, the predetermined value is set to 0.9 or more and within 1.1, the coefficient for calculating the correction value DC is set to 0.7 in step S165, and the correction value DC is calculated in step S166. The coefficient to be set to 0.3 is an example. The present invention is not limited to these numerical values.
以上説明したように、本実施の形態によれば以下の効果を奏する。カメラの焦点調節結果から得られる被写体までの絶対距離情報の誤差が小さいと判定できる状況では、距離情報に重みをおいたフラッシュ装置3の発光量を決定する。これにより、被写体の反射率に依存せず良好な露出を得ることが可能となる。他方、焦点調節結果から得られる被写体までの絶対距離情報の誤差が大きいと判定できる状況では、プリ発光時の測光値に重みをおいたフラッシュ装置3の発光量を決定する。これにより、被写体までの距離情報の誤差から発生する発光量の誤差の影響を低減して安定した露出を得ることが可能となる。
As described above, according to the present embodiment, the following effects are obtained. In a situation where it is possible to determine that the error in the absolute distance information to the subject obtained from the camera focus adjustment result is small, the light emission amount of the
〔他の実施の形態〕
また、本発明の目的は、以下の処理を実行することによって達成される。即ち、上述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)が記憶媒体に格納されたプログラムコードを読み出す処理である。
[Other Embodiments]
The object of the present invention is achieved by executing the following processing. That is, a storage medium in which a program code of software that realizes the functions of the above-described embodiments is supplied to a system or apparatus, and a computer (or CPU, MPU, etc.) of the system or apparatus is stored in the storage medium. This is the process of reading the code.
この場合、記憶媒体から読み出されたプログラムコード自体が前述した実施の形態の機能を実現することになり、そのプログラムコード及び該プログラムコードを記憶した記憶媒体は本発明を構成することになる。 In this case, the program code itself read from the storage medium realizes the functions of the above-described embodiments, and the program code and the storage medium storing the program code constitute the present invention.
また、プログラムコードを供給するための記憶媒体としては、次のものを用いることができる。例えば、フロッピー(登録商標)ディスク、ハードディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW、磁気テープ、不揮発性のメモリカード、ROM等である。または、プログラムコードをネットワークを介してダウンロードしてもよい。 Moreover, the following can be used as a storage medium for supplying the program code. For example, floppy (registered trademark) disk, hard disk, magneto-optical disk, CD-ROM, CD-R, CD-RW, DVD-ROM, DVD-RAM, DVD-RW, DVD + RW, magnetic tape, nonvolatile memory card, ROM or the like. Alternatively, the program code may be downloaded via a network.
また、コンピュータが読み出したプログラムコードを実行することにより、上記実施の形態の機能が実現される場合も本発明に含まれる。加えて、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれる。 Further, the present invention includes a case where the function of the above-described embodiment is realized by executing the program code read by the computer. In addition, an OS (operating system) running on the computer performs part or all of the actual processing based on an instruction of the program code, and the functions of the above-described embodiments are realized by the processing. Is also included.
更に、前述した実施形態の機能が以下の処理によって実現される場合も本発明に含まれる。即ち、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれる。その後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行う場合である。 Furthermore, a case where the functions of the above-described embodiment are realized by the following processing is also included in the present invention. That is, the program code read from the storage medium is written in a memory provided in a function expansion board inserted into the computer or a function expansion unit connected to the computer. Thereafter, based on the instruction of the program code, the CPU or the like provided in the function expansion board or function expansion unit performs part or all of the actual processing.
1 カメラ本体
2 交換レンズ
3 フラッシュ装置
12 撮像素子
26 測光用センサ
34 発光部
41 制御部
43 信号処理回路
56 距離エンコーダ
DESCRIPTION OF
Claims (13)
焦点調節に伴う撮影レンズのレンズ駆動情報に基づいて前記被写体の距離情報を取得する第1の取得手段と、
撮像して得られた画像信号に基づいて前記被写体の顔情報を取得する第2の取得手段と、
前記第2の取得手段により取得された前記顔情報に基づいて被写体距離を演算する距離演算手段と、
前記第1の取得手段によって得られた前記被写体の距離情報と前記距離演算手段で演算された被写体距離とに基づいて、前記発光手段の本発光量を演算する発光量演算手段と、を備えることを特徴とする撮像装置。 An imaging apparatus capable shooting with emitting means for emitting light to an object,
First acquisition means for acquiring distance information of the subject based on lens drive information of the photographing lens accompanying the focus adjustment;
Second acquisition means for acquiring face information of the subject based on an image signal obtained by imaging;
And distance calculating means for calculating the object scene object distance and based on the said face information acquired by the second acquisition unit,
A light emission amount calculation means for calculating a main light emission amount of the light emission means based on the distance information of the subject obtained by the first acquisition means and the subject distance calculated by the distance calculation means. An imaging apparatus characterized by the above.
前記発光量演算手段は、前記測光手段の測光結果に基づく第1の値、及び、前記第1の取得手段によって得られた前記被写体の距離情報に基づく第2の値、の少なくとも一方に基づいて前記発光手段の本発光量を演算し、前記第1の取得手段によって得られた前記被写体の距離情報に基づく被写体距離と前記距離演算手段で演算された被写体距離とに基づいて、前記発光手段の本発光量演算における前記第1の値の重み付け及び前記第2の値の重み付けの少なくとも一方を変更することを特徴とする請求項1に記載の撮像装置。 The light emission amount calculating means is based on at least one of a first value based on the photometric result of the photometric means and a second value based on the subject distance information obtained by the first acquiring means. Based on the subject distance based on the subject distance information obtained by the first acquisition means and the subject distance calculated by the distance calculation means, the main light emission amount of the light emitting means is calculated. The imaging apparatus according to claim 1, wherein at least one of the weighting of the first value and the weighting of the second value in the main light emission amount calculation is changed.
焦点調節に伴う撮影レンズのレンズ駆動情報に基づいて前記被写体の距離情報を取得する第1の取得ステップと、
撮像して得られた画像信号に基づいて前記被写体の顔情報を取得する第2の取得ステップと、
前記第2の取得ステップで取得された前記顔情報に基づいて被写体距離を演算する距離演算ステップと、
前記第1の取得ステップによって得られた前記被写体の距離情報と前記距離演算ステップで演算された被写体距離とに基づいて、前記発光手段の本発光量を演算する発光量演算ステップと、を備えることを特徴とする制御方法。 A method for controlling an imaging apparatus capable of photographing using a light emitting means for emitting light to a subject,
A first acquisition step of acquiring distance information of the subject based on lens drive information of the photographing lens accompanying focus adjustment;
A second acquisition step of acquiring face information of the subject based on an image signal obtained by imaging;
A distance calculation step of calculating the object scene object distance and based on the said face information acquired in the second acquisition step,
A light emission amount calculation step of calculating a main light emission amount of the light emitting means based on the distance information of the subject obtained in the first acquisition step and the subject distance calculated in the distance calculation step. A control method characterized by the above.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008092366A JP4931250B2 (en) | 2008-03-31 | 2008-03-31 | Imaging apparatus and control method |
| US12/414,062 US7894715B2 (en) | 2008-03-31 | 2009-03-30 | Image pickup apparatus, camera system, and control method for image pickup apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008092366A JP4931250B2 (en) | 2008-03-31 | 2008-03-31 | Imaging apparatus and control method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009246774A JP2009246774A (en) | 2009-10-22 |
| JP2009246774A5 JP2009246774A5 (en) | 2011-03-17 |
| JP4931250B2 true JP4931250B2 (en) | 2012-05-16 |
Family
ID=41308194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008092366A Expired - Fee Related JP4931250B2 (en) | 2008-03-31 | 2008-03-31 | Imaging apparatus and control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4931250B2 (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012155149A (en) * | 2011-01-26 | 2012-08-16 | Canon Inc | Imaging apparatus and method for controlling the same |
| JP6398315B2 (en) * | 2014-05-20 | 2018-10-03 | リコーイメージング株式会社 | Imaging device |
| KR101850363B1 (en) * | 2016-02-16 | 2018-04-20 | 주식회사 이오테크닉스 | Photographing apparatus and photographing method |
| KR101993670B1 (en) * | 2016-03-17 | 2019-06-27 | 주식회사 이오테크닉스 | Photographing method and object alignment method using the photographing method |
| JP7118737B2 (en) * | 2018-05-22 | 2022-08-16 | キヤノン株式会社 | Imaging device and its control method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4280515B2 (en) * | 2003-02-27 | 2009-06-17 | キヤノン株式会社 | Strobe shooting system and camera |
| JP4110109B2 (en) * | 2004-03-26 | 2008-07-02 | キヤノン株式会社 | Imaging apparatus and imaging control method |
| JP4420909B2 (en) * | 2006-06-02 | 2010-02-24 | 富士フイルム株式会社 | Imaging device |
| JP2008042616A (en) * | 2006-08-08 | 2008-02-21 | Eastman Kodak Co | Imaging apparatus |
-
2008
- 2008-03-31 JP JP2008092366A patent/JP4931250B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009246774A (en) | 2009-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100379265C (en) | Image capture apparatus and control method therefor | |
| JP5451316B2 (en) | Imaging apparatus and light emission control method | |
| JP5597078B2 (en) | Imaging apparatus and control method thereof | |
| US7894715B2 (en) | Image pickup apparatus, camera system, and control method for image pickup apparatus | |
| US8831414B2 (en) | Imaging apparatus, light emitting device, imaging system, and control method | |
| JP4931250B2 (en) | Imaging apparatus and control method | |
| JP6336337B2 (en) | Imaging apparatus, control method therefor, program, and storage medium | |
| US9268196B2 (en) | Image capture apparatus, light emitting device, and and light emission amount calculation method | |
| JP2009088800A (en) | Color imaging device | |
| JP5063184B2 (en) | IMAGING DEVICE, LIGHT EMITTING DEVICE, AND IMAGING DEVICE CONTROL METHOD | |
| JP2000275512A (en) | Camera | |
| JP2005192139A (en) | Imaging apparatus and system | |
| JP4995133B2 (en) | Imaging apparatus and control method | |
| JP6742733B2 (en) | Imaging device, control method thereof, and control program | |
| JP2005173254A (en) | Camera system | |
| CN109387992B (en) | Image pickup apparatus capable of sufficiently ensuring light emission accuracy and control method thereof | |
| JP4512173B2 (en) | Ranging device | |
| JP2005121834A (en) | Imaging method, imaging apparatus, program, and storage medium | |
| JP6398315B2 (en) | Imaging device | |
| US11115603B2 (en) | Image pickup apparatus that reduces time required for light control processing and method of controlling same | |
| CN108712617B (en) | Image pickup apparatus that performs reflected flash shooting, control method thereof, and storage medium | |
| JP2006017854A (en) | Imaging apparatus and flash light emitting device | |
| JP2007108454A (en) | Imaging apparatus | |
| JP2020098314A (en) | Imaging device, control method of the same, and program | |
| JP2008129467A (en) | Imaging apparatus and imaging system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110131 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110131 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120213 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4931250 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |