JP4898531B2 - 画像処理装置及びその制御方法、並びにコンピュータプログラム - Google Patents
画像処理装置及びその制御方法、並びにコンピュータプログラム Download PDFInfo
- Publication number
- JP4898531B2 JP4898531B2 JP2007105250A JP2007105250A JP4898531B2 JP 4898531 B2 JP4898531 B2 JP 4898531B2 JP 2007105250 A JP2007105250 A JP 2007105250A JP 2007105250 A JP2007105250 A JP 2007105250A JP 4898531 B2 JP4898531 B2 JP 4898531B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- dividing
- image block
- edge
- determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 67
- 238000012545 processing Methods 0.000 title claims description 63
- 238000004590 computer program Methods 0.000 title claims description 8
- 230000008569 process Effects 0.000 claims description 41
- 238000005192 partition Methods 0.000 claims description 13
- 238000000605 extraction Methods 0.000 description 54
- 235000019557 luminance Nutrition 0.000 description 36
- 238000012937 correction Methods 0.000 description 15
- 230000006870 function Effects 0.000 description 15
- 230000012447 hatching Effects 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 8
- 238000007781 pre-processing Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 238000009826 distribution Methods 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 241000533901 Narcissus papyraceus Species 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G06V10/443—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components by matching or filtering
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/50—Extraction of image or video features by performing operations within image blocks; by using histograms, e.g. histogram of oriented gradients [HoG]; by summing image-intensity values; Projection analysis
- G06V10/507—Summing image-intensity values; Histogram projection analysis
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- Studio Devices (AREA)
- Facsimile Image Signal Circuits (AREA)
Description
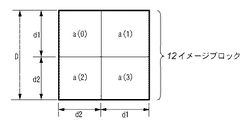
m_v=|1×a(0)+(-1)×a(1)+1×a(2)+(-1)×a(3)| …(1)
ETRI Journal, Volume 24, Number 1,February 2002("Efficient Use of MPEG-7 Edge Histogram Descriptor" CheeSun Won et al.)
d=b+g …(2)
a(1)=a(3)=((d−b)×255)/d
m_v=(a×255)/d …(3)
したがって、イメージブロックのサイズがクエリの画像とデータベースの画像とで同じであるとすると、m_vの値は、aの値によって、閾値Aより大きくなったり小さくなったりして、エッジが検出できたりできなかったりする。
画像を複数のイメージブロックへ分割する分割手段と、
前記分割手段で得られたイメージブロックを分割して2次元に配列された所定数の区画を取得する取得手段と、
前記取得手段で取得した前記所定数の前記区画の輝度情報に基づいて前記イメージブロックの画像のエッジ方向を判定する第1判定手段と、
前記第1判定手段でエッジ方向を判定できなかった場合に、前記イメージブロックにおける区画の生成の仕方を変更することにより、前記所定数の変更された区画を生成する生成手段と、
前記生成手段で生成した前記所定数の前記変更された区画の輝度情報に基づいてエッジ方向を判定し、該判定したエッジ方向を前記イメージブロックの画像のエッジ方向とする第2判定手段と、
前記第1判定手段または前記第2判定手段の判定結果にしたがって前記イメージブロックのエッジ方向を決定する決定手段とを備える。
分割手段が、画像を複数のイメージブロックへ分割する分割工程と、
取得手段が、前記分割工程で得られたイメージブロックを分割して2次元的に配列された所定数の区画を取得する取得工程と、
第1判定手段が、前記取得工程で取得した前記所定数の前記区画の輝度情報に基づいて前記イメージブロックの画像のエッジ方向を判定する第1判定工程と、
生成手段が、前記第1判定工程でエッジ方向を判定できなかった場合に、前記イメージブロックにおける区画の生成の仕方を変更することにより、前記所定数の変更された区画を生成する生成工程と、
第2判定手段が、前記生成工程で生成した前記所定数の前記変更された区画の輝度情報に基づいてエッジ方向を判定し、該判定したエッジ方向を前記イメージブロックの画像のエッジ方向とする第2判定工程と、
決定手段が、前記第1判定工程または前記第2判定工程の判定結果にしたがって前記イメージブロックのエッジ方向を決定する決定工程とを有する。
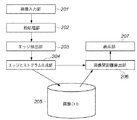
まず、画像処理装置100への画像の登録処理について、図3のフローチャートを用いて説明する。
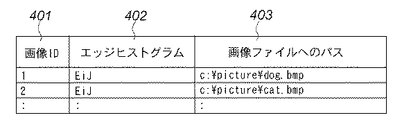
次に、ステップS304においてエッジ抽出部203は、入力画像に対してエッジの抽出を行う。エッジ抽出の処理の詳細は後述する。次に、ステップS305においてエッジヒストグラム生成部204は、ステップS305で抽出されたエッジを集計し、図12、図13により上述したようにエッジヒストグラムEijを生成する。次に、ステップS306においてエッジヒストグラム生成部204は、生成したエッジヒストグラムEijをインデックスとして画像と関連付けて画像データベース205に記憶する。
エッジ抽出処理の詳細について、図5のフローチャートを用いて説明する。
画像処理装置100による検索処理について、図9のフローチャートを用いて説明する。
上記実施形態においては、画像検索に用いられる特徴量として文献1に記載されているエッジヒストグラムを使用したが、もちろん、これに限定されるものではない。例えば、無方向フィルタを用いず、方向フィルタのみを用いるようにしてもよい。また、式(1)では、エッジの向きの違いは考慮していない(絶対値をとっている)が、式(1)においてプラスの値とマイナスの値を別々に扱うようにして、向きの違いを考慮するようにしてもよい。また、方向フィルタを5つ以上用いてもよい。例えば、図13に示した(a)〜(d)の方向フィルタに、22.5度、67.5度、112.5度、157.5度を加えた8つの方向フィルタを用いてもよい。
Claims (13)
- 画像を複数のイメージブロックへ分割する分割手段と、
前記分割手段で得られたイメージブロックを分割して2次元に配列された所定数の区画を取得する取得手段と、
前記取得手段で取得した前記所定数の前記区画の輝度情報に基づいて前記イメージブロックの画像のエッジ方向を判定する第1判定手段と、
前記第1判定手段でエッジ方向を判定できなかった場合に、前記イメージブロックにおける区画の生成の仕方を変更することにより、前記所定数の変更された区画を生成する生成手段と、
前記生成手段で生成した前記所定数の前記変更された区画の輝度情報に基づいてエッジ方向を判定し、該判定したエッジ方向を前記イメージブロックの画像のエッジ方向とする第2判定手段と、
前記第1判定手段または前記第2判定手段の判定結果にしたがって前記イメージブロックのエッジ方向を決定する決定手段とを備えることを特徴とする画像処理装置。 - 前記生成手段は、前記イメージブロックの大きさを変更し、大きさが変更されたイメージブロックを前記所定数の区画に分割することにより前記所定数の前記変更された区画を生成することを特徴とする請求項1に記載の画像処理装置。
- 前記生成手段は、前記イメージブロックを前記所定数の区画へ分割する際に、前記イメージブロックの縦方向と横方向の分割の比率を変更することにより、前記所定数の前記変更された区画を生成することを特徴とする請求項1に記載の画像処理装置。
- 前記第1判定手段でエッジ方向を判定できなかった場合に、前記イメージブロック内の全画像の輝度ヒストグラムに基づいて前記イメージブロックにおけるエッジの存在の可能性を判定する第3判定手段と、
前記第3判定手段で前記イメージブロックにエッジの存在する可能性があると判定された場合に、前記生成手段と前記第2判定手段による処理を実行させる制御手段とを更に備えることを特徴とする請求項1乃至3の何れか1項に記載の画像処理装置。 - 前記分割手段は、入力された画像を複数のサブイメージへ分割し、更に前記複数のサブイメージの各々を分割して前記複数のイメージブロックを取得し、
前記複数のサブイメージの各々について、前記決定手段によって決定された各イメージブロックのエッジ方向のヒストグラムを生成して、前記入力された画像の特徴量とする特徴量生成手段を更に備えることを特徴とする請求項1乃至4の何れか1項に記載の画像処理装置。 - 画像処理装置の制御方法であって、
分割手段が、画像を複数のイメージブロックへ分割する分割工程と、
取得手段が、前記分割工程で得られたイメージブロックを分割して2次元的に配列された所定数の区画を取得する取得工程と、
第1判定手段が、前記取得工程で取得した前記所定数の前記区画の輝度情報に基づいて前記イメージブロックの画像のエッジ方向を判定する第1判定工程と、
生成手段が、前記第1判定工程でエッジ方向を判定できなかった場合に、前記イメージブロックにおける区画の生成の仕方を変更することにより、前記所定数の変更された区画を生成する生成工程と、
第2判定手段が、前記生成工程で生成した前記所定数の前記変更された区画の輝度情報に基づいてエッジ方向を判定し、該判定したエッジ方向を前記イメージブロックの画像のエッジ方向とする第2判定工程と、
決定手段が、前記第1判定工程または前記第2判定工程の判定結果にしたがって前記イメージブロックのエッジ方向を決定する決定工程とを有することを特徴とする画像処理装置の制御方法。 - 前記生成工程では、前記イメージブロックの大きさを変更し、大きさが変更されたイメージブロックを前記所定数の区画に分割することにより前記所定数の前記変更された区画を生成することを特徴とする請求項6に記載の画像処理装置の制御方法。
- 前記生成工程では、前記イメージブロックを前記所定数の区画へ分割する際に、前記イメージブロックの縦方向と横方向の分割の比率を変更することにより、前記所定数の前記変更された区画を生成することを特徴とする請求項6に記載の画像処理装置の制御方法。
- 前記第1判定工程でエッジ方向を判定できなかった場合に、第3判定手段が、前記イメージブロック内の全画像の輝度ヒストグラムに基づいて前記イメージブロックにおけるエッジの存在の可能性を判定する第3判定工程と、
制御手段が、前記第3判定工程で前記イメージブロックにエッジの存在する可能性があると判定された場合に、前記生成工程と前記第2判定工程による処理を実行させる制御工程とを更に備えることを特徴とする請求項6乃至8の何れか1項に記載の画像処理装置の制御方法。 - 前記分割工程では、入力された画像を複数のサブイメージへ分割し、更に前記複数のサブイメージの各々を分割して前記複数のイメージブロックを取得し、
特徴量生成手段が、前記複数のサブイメージの各々について、前記決定工程によって決定された各イメージブロックのエッジ方向のヒストグラムを生成して、前記入力された画像の特徴量とする特徴量生成工程を更に有することを特徴とする請求項6乃至9の何れか1項に記載の画像処理装置の制御方法。 - 画像を複数のサブイメージへ分割し、各サブイメージを複数のイメージブロックへ分割する分割手段と、
前記分割手段で得られたイメージブロックを分割して2次元に配列された所定数の区画からなる区画集合を取得する取得手段と、
前記取得手段で取得した前記複数の区画集合のそれぞれについて、区画の輝度情報に基づいてエッジ方向を判定することにより、各サブイメージについてエッジ方向のヒストグラムを生成する判定手段と、
前記分割手段による前記サブイメージの分割の仕方を変えて異なるサイズの複数のイメージブロックを生成させ、前記判定手段にエッジ方向のヒストグラムを生成させることにより、複数のヒストグラムを生成する生成手段と、
前記生成手段により生成された複数のヒストグラムのうち、最も度数の大きいヒストグラムを対応するサブイメージのエッジヒストグラムとする決定手段とを備えることを特徴とする画像処理装置。 - 画像処理装置の制御方法であって、
分割手段が、画像を複数のサブイメージへ分割し、各サブイメージを複数のイメージブロックへ分割する分割工程と、
取得手段が、前記分割工程で得られたイメージブロックを分割して2次元に配列された所定数の区画からなる区画集合を取得する取得工程と、
判定手段が、前記取得工程で取得された前記複数の区画集合のそれぞれについて、区画の輝度情報に基づいてエッジ方向を判定することにより、各サブイメージについてエッジ方向のヒストグラムを生成する判定工程と、
生成手段が、前記サブイメージの分割の仕方を変えて異なるサイズの複数のイメージブロックを前記分割工程に生成させ、前記判定工程にエッジ方向のヒストグラムを生成させることにより、複数のヒストグラムを生成する生成工程と、
決定手段が、前記生成工程で生成された複数のヒストグラムのうち、最も度数の大きいヒストグラムを対応するサブイメージのエッジヒストグラムとする決定工程とを有することを特徴とする画像処理装置の制御方法。 - コンピュータに、請求項6乃至10,12のいずれか1項に記載の画像処理装置の制御方法の各工程を実行させるコンピュータプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007105250A JP4898531B2 (ja) | 2007-04-12 | 2007-04-12 | 画像処理装置及びその制御方法、並びにコンピュータプログラム |
| US12/060,838 US8064705B2 (en) | 2007-04-12 | 2008-04-01 | Image processing apparatus and control method thereof |
| CN2008100899498A CN101286230B (zh) | 2007-04-12 | 2008-04-11 | 图像处理设备和图像处理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007105250A JP4898531B2 (ja) | 2007-04-12 | 2007-04-12 | 画像処理装置及びその制御方法、並びにコンピュータプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008262424A JP2008262424A (ja) | 2008-10-30 |
| JP2008262424A5 JP2008262424A5 (ja) | 2010-05-27 |
| JP4898531B2 true JP4898531B2 (ja) | 2012-03-14 |
Family
ID=39853767
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007105250A Expired - Fee Related JP4898531B2 (ja) | 2007-04-12 | 2007-04-12 | 画像処理装置及びその制御方法、並びにコンピュータプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8064705B2 (ja) |
| JP (1) | JP4898531B2 (ja) |
| CN (1) | CN101286230B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4727720B2 (ja) * | 2008-12-31 | 2011-07-20 | 株式会社モルフォ | 画像処理方法および画像処理装置 |
| JP5322824B2 (ja) * | 2009-07-28 | 2013-10-23 | キヤノン株式会社 | 解像度変換装置および解像度変換方法 |
| JP5507962B2 (ja) * | 2009-11-05 | 2014-05-28 | キヤノン株式会社 | 情報処理装置及びその制御方法、プログラム |
| JP5391144B2 (ja) * | 2010-05-10 | 2014-01-15 | 日本放送協会 | 顔表情変化度測定装置およびそのプログラム並びに番組興味度測定装置 |
| JP5685837B2 (ja) * | 2010-06-15 | 2015-03-18 | ソニー株式会社 | ジェスチャ認識装置、ジェスチャ認識方法およびプログラム |
| CN102622366B (zh) * | 2011-01-28 | 2014-07-30 | 阿里巴巴集团控股有限公司 | 相似图像的识别方法和装置 |
| JP5176067B1 (ja) * | 2011-12-20 | 2013-04-03 | 株式会社アクセル | 画像処理装置及び画像処理方法 |
| CN106295478A (zh) * | 2015-06-04 | 2017-01-04 | 深圳市中兴微电子技术有限公司 | 一种图像特征提取方法和装置 |
| JP7633589B2 (ja) | 2020-12-12 | 2025-02-20 | ブラザー工業株式会社 | コンピュータプログラム、画像処理装置、および、画像処理方法 |
| CN113743351B (zh) * | 2021-09-14 | 2023-07-04 | 北京石油化工学院 | 一种基于边缘方向语义信息的遥感影像场景识别的方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0658687B2 (ja) * | 1987-01-22 | 1994-08-03 | 富士電機株式会社 | エツジ強調装置 |
| JP3915563B2 (ja) * | 2002-03-19 | 2007-05-16 | 富士ゼロックス株式会社 | 画像処理装置および画像処理プログラム |
| KR20050085355A (ko) | 2002-12-05 | 2005-08-29 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 분할된 이미지로부터 폴스 엣지들을 제거하는 방법 및 장치 |
| JP4442893B2 (ja) * | 2005-01-14 | 2010-03-31 | キヤノン株式会社 | 画像検索装置及びその制御方法、並びにコンピュータプログラム及びコンピュータ可読記憶媒体 |
| CN100466746C (zh) * | 2005-07-21 | 2009-03-04 | 海信集团有限公司 | 基于宏块内边缘信息选择分割的方法 |
-
2007
- 2007-04-12 JP JP2007105250A patent/JP4898531B2/ja not_active Expired - Fee Related
-
2008
- 2008-04-01 US US12/060,838 patent/US8064705B2/en not_active Expired - Fee Related
- 2008-04-11 CN CN2008100899498A patent/CN101286230B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008262424A (ja) | 2008-10-30 |
| US20080253661A1 (en) | 2008-10-16 |
| CN101286230A (zh) | 2008-10-15 |
| CN101286230B (zh) | 2012-03-21 |
| US8064705B2 (en) | 2011-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4898531B2 (ja) | 画像処理装置及びその制御方法、並びにコンピュータプログラム | |
| CN106254933B (zh) | 字幕提取方法及装置 | |
| US20110116709A1 (en) | Image processing method and image processing apparatus | |
| JP4966077B2 (ja) | 画像処理装置及びその制御方法 | |
| CN102473278B (zh) | 图像处理装置、图像处理方法和存储介质 | |
| JP2006344069A (ja) | 画像処理方法及び画像処理装置 | |
| AU2023214276B2 (en) | Finding the semantic region of interest in images | |
| JP4817821B2 (ja) | 画像処理装置及びその制御方法、並びに、コンピュータプログラム及びコンピュータ可読記憶媒体 | |
| JP4739082B2 (ja) | 画像処理方法及び画像処理装置 | |
| US7680339B2 (en) | Image processing method and apparatus for edge detection in an image | |
| CN110996173B (zh) | 一种图像数据处理方法、装置及存储介质 | |
| JP2007158725A (ja) | 画像処理装置及び画像処理方法並びにプログラム | |
| JP3817506B2 (ja) | 画像圧縮装置、画像伸長装置及びそれらの方法、プログラム | |
| JP4579646B2 (ja) | 画像処理装置、画像処理方法、コンピュータプログラム及び記憶媒体 | |
| JP4748789B2 (ja) | 画像処理方法及び画像処理装置 | |
| KR100811834B1 (ko) | 영상 특징량 추출방법 및 이를 이용한 내용 기반 영상 검색방법 | |
| CN111127288A (zh) | 可逆图像水印处理方法、装置及计算机可读存储介质 | |
| JP4383187B2 (ja) | 画像処理装置、画像処理用プログラム及び記憶媒体 | |
| KR101706347B1 (ko) | 샷 경계 검출 방법, 그리고 이를 구현한 영상 처리 장치 및 방법 | |
| JP6142701B2 (ja) | 画像処理装置及びプログラム | |
| JP4854398B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP4104590B2 (ja) | 複写管理システム、透かし情報抽出装置、透かし情報抽出方法、およびそのプログラム | |
| JP2007156841A5 (ja) | ||
| JP2009071736A (ja) | 画像処理装置、画像処理方法、プログラムおよび記録媒体 | |
| HK40022550B (en) | Method and device for processing image data and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100412 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100412 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111125 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111226 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4898531 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |