JP4884251B2 - 撮影装置および方法並びにプログラム - Google Patents
撮影装置および方法並びにプログラム Download PDFInfo
- Publication number
- JP4884251B2 JP4884251B2 JP2007030074A JP2007030074A JP4884251B2 JP 4884251 B2 JP4884251 B2 JP 4884251B2 JP 2007030074 A JP2007030074 A JP 2007030074A JP 2007030074 A JP2007030074 A JP 2007030074A JP 4884251 B2 JP4884251 B2 JP 4884251B2
- Authority
- JP
- Japan
- Prior art keywords
- face
- candidate
- image
- component
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/765—Interface circuits between an apparatus for recording and another apparatus
- H04N5/77—Interface circuits between an apparatus for recording and another apparatus between a recording apparatus and a television camera
- H04N5/772—Interface circuits between an apparatus for recording and another apparatus between a recording apparatus and a television camera the recording apparatus and the television camera being placed in the same enclosure
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/161—Detection; Localisation; Normalisation
- G06V40/165—Detection; Localisation; Normalisation using facial parts and geometric relationships
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/262—Studio circuits, e.g. for mixing, switching-over, change of character of image, other special effects ; Cameras specially adapted for the electronic generation of special effects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2101/00—Still video cameras
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- General Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Studio Devices (AREA)
Description
前記画像に含まれるすべての顔候補を検出する顔検出手段と、
前記各顔候補に含まれる少なくとも1つの顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記各顔候補が真の顔であるか否かを判定する判定手段とを備えたことを特徴とするものである。
前記画像に含まれるすべての顔候補を検出する顔検出手段と、
前記各顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記各顔候補が真の顔であるか否かを判定する判定手段とを備えたことを特徴とするものである。
前記画像に含まれるすべての顔候補を検出する顔検出手段と、
前記各顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記各顔候補が真の顔、非顔および曖昧顔のいずれであるかを判定し、該曖昧顔であると判定された前記顔候補について、前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記曖昧顔であると判定された顔候補が前記真の顔であるか否かを判定する判定手段とを備えたことを特徴とするものである。
前記顔検出手段を、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該真の顔が検出されなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する手段としてもよい。
前記顔検出手段を、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する手段としてもよい。
前記画像に含まれるすべての顔候補を検出し、
前記各顔候補に含まれる少なくとも1つの顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記各顔候補が真の顔であるか否かを判定することを特徴とするものである。
前記画像に含まれるすべての顔候補を検出し、
前記各顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記各顔候補が真の顔であるか否かを判定することを特徴とするものである。
前記画像に含まれるすべての顔候補を検出し、
前記各顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記各顔候補が真の顔、非顔および曖昧顔のいずれであるかを判定し、
前記曖昧顔であると判定された前記顔候補について、前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記曖昧顔であると判定された顔候補が前記真の顔であるか否かを判定することを特徴とするものである。
y′=a2・x+b2・y+d2 (1)
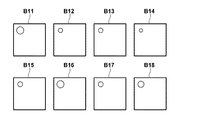
式(1)より、アフィン変換の係数a1,a2,b1,b2,d1,d2を算出するためには、顔候補内および顔構成部品の確率分布内においてそれぞれ対応する3点の座標が必要となる。ここで、顔候補および顔構成部品の確率分布において、図15に示すように左下隅を原点とするXY座標系を考えると、顔構成部品候補P1〜P9が確率分布B1〜B9の中心に位置するようにアフィン変換の係数を設定する必要がある。第4の実施形態においては、顔構成部品毎に顔構成部品検出部38が検出した少なくとも1つの顔構成部品候補のうち、マッチング度が最も高い顔構成部品候補を顔構成部品候補を代表する顔構成部品候補P1〜P9として選択し、選択した9個の顔構成部品候補P1〜P9のうちマッチング度が大きい上位3個の顔構成部品候補を、対応する顔構成部品の確率分布の中心と一致させるようにアフィン変換の係数a1,a2,b1,b2,d1,d2を算出すればよい。
2 操作系
3 操作系制御部
6 撮像系
28 モニタ
35 記録メディア
37 顔検出部
38 顔構成部品検出部
39 判定部
40 CPU
43 シーン判定部
Claims (12)
- 連続した撮影により画像を連続して取得する撮影手段と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換える顔検出手段であって、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する顔検出手段と、
前記顔検出手段が前記顔候補を検出した場合に、該顔候補に含まれる少なくとも1つの顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔であるか否かを判定する判定手段とを備えたことを特徴とする撮影装置。 - 連続した撮影により画像を連続して取得する撮影手段と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換える顔検出手段であって、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する顔検出手段と、
前記顔検出手段が前記顔候補を検出した場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記顔候補が真の顔であるか否かを判定する判定手段とを備えたことを特徴とする撮影装置。 - 前記判定手段は、前記顔候補の領域内における前記各顔構成部品候補の、対応する前記顔構成部品に対する位置的な尤度を算出し、該位置的な尤度に基づいて前記顔候補が真の顔であるか否かを判定する手段であることを特徴とする請求項2記載の撮影装置。
- 前記判定手段は、前記顔候補の領域内における前記各顔構成部品候補の、対応する前記顔構成部品以外の他の顔構成部品に対する位置関係の尤度を算出し、該位置関係の尤度に基づいて前記顔候補が真の顔であるか否かを判定する手段であることを特徴とする請求項2記載の撮影装置。
- 前記判定手段は、前記顔候補の領域内において前記各顔構成部品候補の位置が対応する顔構成部品の位置となるように前記顔候補を正規化し、該正規化した前記顔候補内における前記各顔構成部品候補の位置に基づいて、前記顔候補が真の顔であるか否かを判定する手段であることを特徴とする請求項2から4のいずれか1項記載の撮影装置。
- 連続した撮影により画像を連続して取得する撮影手段と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換える顔検出手段であって、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する顔検出手段と、
前記顔検出手段が前記顔候補を検出した場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する顔構成部品検出手段と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔、非顔および曖昧顔のいずれであるかを判定し、該曖昧顔であると判定された前記顔候補について、前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記曖昧顔であると判定された顔候補が前記真の顔であるか否かを判定する判定手段とを備えたことを特徴とする撮影装置。 - 連続した撮影により画像を連続して取得し、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出し、
前記顔候補が検出された場合に、該顔候補に含まれる少なくとも1つの顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔であるか否かを判定することを特徴とする撮影方法。 - 連続した撮影により画像を連続して取得し、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出し、
前記顔候補が検出された場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記顔候補が真の顔であるか否かを判定することを特徴とする撮影方法。 - 連続した撮影により画像を連続して取得し、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出し、
前記顔候補が検出された場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出し、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔、非顔および曖昧顔のいずれであるかを判定し、
前記曖昧顔であると判定された前記顔候補について、前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記曖昧顔であると判定された顔候補が前記真の顔であるか否かを判定することを特徴とする撮影方法。 - 連続した撮影により画像を連続して取得する手順と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する手順と、
前記顔候補が検出された場合に、該顔候補に含まれる少なくとも1つの顔構成部品の候補を該顔構成部品毎に検出する手順と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔であるか否かを判定する手順とを有することを特徴とする撮影方法をコンピュータに実行させるためのプログラム。 - 連続した撮影により画像を連続して取得する手順と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する手順と、
前記顔候補が検出された場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する手順と、
前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記顔候補が真の顔であるか否かを判定する手順とを有することを特徴とする撮影方法をコンピュータに実行させるためのプログラム。 - 連続した撮影により画像を連続して取得する手順と、
所定サイズの顔検出用の検出枠を前記画像上において移動させ、移動した位置毎に該検出枠内の前記画像から特徴量を算出し、該特徴量とあらかじめ定められた顔特徴量とのマッチング度を算出し、該マッチング度が所定のしきい値以上となったときに前記検出枠の位置の画像を顔候補として検出するか、真の顔として検出するかを切り換えるに際し、前記連続して取得された画像について、前記検出枠の位置の画像を前記真の顔として検出し、該画像のシーンの明るさが所定の条件を満たさなくなったときに、前記検出枠の位置の画像を前記顔候補として検出する手順と、
前記顔候補が検出された場合に、該顔候補に含まれる複数の顔構成部品の候補を該顔構成部品毎に検出する手順と、
前記顔構成部品毎に検出された前記顔構成部品候補の数に基づいて、前記顔候補が真の顔、非顔および曖昧顔のいずれであるかを判定する手順と、
前記曖昧顔であると判定された前記顔候補について、前記顔構成部品毎に検出された前記顔構成部品候補の位置に基づいて、前記曖昧顔であると判定された顔候補が前記真の顔であるか否かを判定する手順とを有することを特徴とする撮影方法をコンピュータに実行させるためのプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007030074A JP4884251B2 (ja) | 2007-02-09 | 2007-02-09 | 撮影装置および方法並びにプログラム |
| KR1020080011635A KR100942766B1 (ko) | 2007-02-09 | 2008-02-05 | 촬영 장치와 방법, 및 프로그램 기록 매체 |
| US12/027,848 US7868915B2 (en) | 2007-02-09 | 2008-02-07 | Photographing apparatus, method and computer program product |
| CN2008100097270A CN101241549B (zh) | 2007-02-09 | 2008-02-13 | 拍摄设备和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007030074A JP4884251B2 (ja) | 2007-02-09 | 2007-02-09 | 撮影装置および方法並びにプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008197762A JP2008197762A (ja) | 2008-08-28 |
| JP4884251B2 true JP4884251B2 (ja) | 2012-02-29 |
Family
ID=39685477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007030074A Expired - Fee Related JP4884251B2 (ja) | 2007-02-09 | 2007-02-09 | 撮影装置および方法並びにプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7868915B2 (ja) |
| JP (1) | JP4884251B2 (ja) |
| KR (1) | KR100942766B1 (ja) |
| CN (1) | CN101241549B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023189195A1 (ja) | 2022-03-30 | 2023-10-05 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009237976A (ja) * | 2008-03-27 | 2009-10-15 | Seiko Epson Corp | 顔画像出力制御装置、顔画像出力制御方法、顔画像出力制御プログラムおよび印刷装置 |
| JP5132445B2 (ja) * | 2008-06-25 | 2013-01-30 | キヤノン株式会社 | 画像処理装置および画像処理方法並びにコンピュータプログラムおよび記憶媒体 |
| JP4702418B2 (ja) * | 2008-09-09 | 2011-06-15 | カシオ計算機株式会社 | 撮影装置、画像領域の存否判定方法及びプログラム |
| JP5106355B2 (ja) * | 2008-11-13 | 2012-12-26 | キヤノン株式会社 | 表情判定装置、その制御方法、撮像装置及びプログラム |
| KR101593502B1 (ko) * | 2009-07-20 | 2016-02-18 | 엘지이노텍 주식회사 | 인물 촬영 방법 |
| JP5385752B2 (ja) * | 2009-10-20 | 2014-01-08 | キヤノン株式会社 | 画像認識装置、その処理方法及びプログラム |
| JP5818409B2 (ja) * | 2010-06-17 | 2015-11-18 | キヤノン株式会社 | 眼底撮像装置及びその制御方法 |
| JP5725793B2 (ja) * | 2010-10-26 | 2015-05-27 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| US9501714B2 (en) | 2010-10-29 | 2016-11-22 | Qualcomm Incorporated | Systems and methods to improve feature generation in object recognition |
| WO2013008302A1 (ja) * | 2011-07-11 | 2013-01-17 | トヨタ自動車株式会社 | 赤目判定装置 |
| US20150185308A1 (en) * | 2014-01-02 | 2015-07-02 | Katsuhiro Wada | Image processing apparatus and image processing method, image pickup apparatus and control method thereof, and program |
| CN106778585B (zh) * | 2016-12-08 | 2019-04-16 | 腾讯科技(上海)有限公司 | 一种人脸关键点跟踪方法和装置 |
| JP6627894B2 (ja) * | 2018-01-12 | 2020-01-08 | 日本電気株式会社 | 顔認証装置 |
| CN111447355B (zh) * | 2019-10-23 | 2021-06-25 | 上海探宇网络科技有限公司 | 自动化白平衡值大数据调节系统 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07311833A (ja) * | 1994-05-17 | 1995-11-28 | Nec Corp | 人物の顔の検出装置 |
| DE60119418T2 (de) * | 2000-03-22 | 2007-05-24 | Kabushiki Kaisha Toshiba, Kawasaki | Gesichtsbildaufnehmendes Erkennungsgerät und Passüberprüfungsgerät |
| KR20020036143A (ko) * | 2000-11-08 | 2002-05-16 | 구자홍 | 디지털 영상 저장장치에 의한 접근 제어 장치 및 방법 |
| JP2002183734A (ja) | 2000-12-15 | 2002-06-28 | Toshiba Corp | 顔認証装置および顔認証方法 |
| KR20030040680A (ko) * | 2001-11-15 | 2003-05-23 | 삼성에스디에스 주식회사 | 얼굴 검출 방법 및 그 장치 |
| JP4314017B2 (ja) * | 2002-11-06 | 2009-08-12 | キヤノン株式会社 | 階層処理装置 |
| JP4107104B2 (ja) * | 2003-02-25 | 2008-06-25 | 日産自動車株式会社 | 顔部位追跡装置 |
| EP1653279B1 (en) * | 2003-07-15 | 2019-02-06 | Omron Corporation | Object decision device and imaging device |
| JP4743823B2 (ja) * | 2003-07-18 | 2011-08-10 | キヤノン株式会社 | 画像処理装置、撮像装置、画像処理方法 |
| EP1650711B1 (en) * | 2003-07-18 | 2015-03-04 | Canon Kabushiki Kaisha | Image processing device, imaging device, image processing method |
| JP2005078376A (ja) * | 2003-08-29 | 2005-03-24 | Sony Corp | 対象物検出装置、対象物方法、及びロボット装置 |
| JP4259365B2 (ja) * | 2004-03-25 | 2009-04-30 | トヨタ自動車株式会社 | 画像認識装置及び画像認識方法 |
| US8194173B2 (en) * | 2004-07-16 | 2012-06-05 | Nikon Corporation | Auto-focusing electronic camera that focuses on a characterized portion of an object |
| KR100668303B1 (ko) * | 2004-08-04 | 2007-01-12 | 삼성전자주식회사 | 피부색 및 패턴 매칭을 이용한 얼굴 검출 방법 |
| WO2006090449A1 (ja) * | 2005-02-23 | 2006-08-31 | Fujitsu Limited | 画像処理方法、画像処理装置、画像処理システム及びコンピュータプログラム |
-
2007
- 2007-02-09 JP JP2007030074A patent/JP4884251B2/ja not_active Expired - Fee Related
-
2008
- 2008-02-05 KR KR1020080011635A patent/KR100942766B1/ko not_active IP Right Cessation
- 2008-02-07 US US12/027,848 patent/US7868915B2/en not_active Expired - Fee Related
- 2008-02-13 CN CN2008100097270A patent/CN101241549B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023189195A1 (ja) | 2022-03-30 | 2023-10-05 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101241549B (zh) | 2012-07-18 |
| US20080192122A1 (en) | 2008-08-14 |
| JP2008197762A (ja) | 2008-08-28 |
| CN101241549A (zh) | 2008-08-13 |
| KR20080074780A (ko) | 2008-08-13 |
| US7868915B2 (en) | 2011-01-11 |
| KR100942766B1 (ko) | 2010-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4884251B2 (ja) | 撮影装置および方法並びにプログラム | |
| JP4819001B2 (ja) | 撮影装置および方法並びにプログラム、画像処理装置および方法並びにプログラム | |
| JP4973098B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| US8520091B2 (en) | Auto white balance correction value calculation device, method, program, and image pickup device | |
| JP4217698B2 (ja) | 撮像装置及び画像処理方法 | |
| US8593542B2 (en) | Foreground/background separation using reference images | |
| JP4782725B2 (ja) | 合焦装置および方法並びにプログラム | |
| JP4008778B2 (ja) | 撮像装置 | |
| US20080317379A1 (en) | Digital image enhancement with reference images | |
| US9092659B2 (en) | Subject determination apparatus that determines whether or not subject is specific subject | |
| JP4839908B2 (ja) | 撮像装置、自動焦点調整方法、およびプログラム | |
| JP2011166442A (ja) | 撮像装置 | |
| US8988545B2 (en) | Digital photographing apparatus and method of controlling the same | |
| CN101242494B (zh) | 数字拍摄装置和用于控制数字拍摄装置的方法 | |
| JP2010028608A (ja) | 画像処理装置、撮像装置、再生装置及び画像処理方法 | |
| JP2011128643A (ja) | 撮像装置、自動焦点調整方法、およびプログラム | |
| JP4726251B2 (ja) | 撮像装置及び画像処理方法 | |
| JP2013152643A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5509621B2 (ja) | 画像処理装置、カメラおよびプログラム | |
| JP2008172395A (ja) | 撮像装置、画像処理装置、方法およびプログラム | |
| JP2008197763A (ja) | 撮影装置および方法並びにプログラム | |
| JP2008199146A (ja) | 撮影装置および方法並びにプログラム | |
| JP5016999B2 (ja) | 撮像装置、撮像方法、及びプログラム | |
| JP2012118634A (ja) | 画像認識方法、画像認識装置及び撮像システム | |
| JP5606300B2 (ja) | 撮像装置及び撮像装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090910 |
|
| RD15 | Notification of revocation of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7435 Effective date: 20110415 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111206 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4884251 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |