JP4875102B2 - カバレッジロボット移動性 - Google Patents
カバレッジロボット移動性 Download PDFInfo
- Publication number
- JP4875102B2 JP4875102B2 JP2008543548A JP2008543548A JP4875102B2 JP 4875102 B2 JP4875102 B2 JP 4875102B2 JP 2008543548 A JP2008543548 A JP 2008543548A JP 2008543548 A JP2008543548 A JP 2008543548A JP 4875102 B2 JP4875102 B2 JP 4875102B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- cleaning head
- edge cleaning
- chassis
- edge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004140 cleaning Methods 0.000 claims abstract description 197
- 230000002441 reversible effect Effects 0.000 claims abstract description 55
- 230000004044 response Effects 0.000 claims abstract description 40
- 238000000034 method Methods 0.000 claims description 66
- 230000033001 locomotion Effects 0.000 claims description 51
- 230000007935 neutral effect Effects 0.000 claims description 7
- 239000003463 adsorbent Substances 0.000 claims description 5
- 239000000835 fiber Substances 0.000 claims description 5
- 238000011086 high cleaning Methods 0.000 claims description 5
- 238000001514 detection method Methods 0.000 abstract description 18
- 230000008569 process Effects 0.000 description 35
- 230000009471 action Effects 0.000 description 30
- 238000003756 stirring Methods 0.000 description 14
- 230000002829 reductive effect Effects 0.000 description 11
- 238000013019 agitation Methods 0.000 description 10
- 230000008859 change Effects 0.000 description 10
- 239000000428 dust Substances 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 239000010813 municipal solid waste Substances 0.000 description 8
- 238000012795 verification Methods 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 5
- 230000003542 behavioural effect Effects 0.000 description 4
- 230000009021 linear effect Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000003750 conditioning effect Effects 0.000 description 3
- 239000004417 polycarbonate Substances 0.000 description 3
- 229920000515 polycarbonate Polymers 0.000 description 3
- 238000004381 surface treatment Methods 0.000 description 3
- 241000282412 Homo Species 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 2
- 210000003423 ankle Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 239000004744 fabric Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 238000005406 washing Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- QPLDLSVMHZLSFG-UHFFFAOYSA-N Copper oxide Chemical compound [Cu]=O QPLDLSVMHZLSFG-UHFFFAOYSA-N 0.000 description 1
- 239000005751 Copper oxide Substances 0.000 description 1
- 229920004142 LEXAN™ Polymers 0.000 description 1
- 239000004418 Lexan Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 239000002216 antistatic agent Substances 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 229910000431 copper oxide Inorganic materials 0.000 description 1
- 238000003869 coulometry Methods 0.000 description 1
- 238000009408 flooring Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 238000003971 tillage Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L5/00—Structural features of suction cleaners
- A47L5/12—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum
- A47L5/22—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum with rotary fans
- A47L5/28—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle
- A47L5/30—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle with driven dust-loosening tools, e.g. rotating brushes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0461—Dust-loosening tools, e.g. agitators, brushes
- A47L9/0466—Rotating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/10—Filters; Dust separators; Dust removal; Automatic exchange of filters
- A47L9/12—Dry filters
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2894—Details related to signal transmission in suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/30—Arrangement of illuminating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0003—Home robots, i.e. small robots for domestic use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2036—Electric differentials, e.g. for supporting steering vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/52—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by DC-motors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0225—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving docking at a fixed facility, e.g. base station or loading bay
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0227—Control of position or course in two dimensions specially adapted to land vehicles using mechanical sensing means, e.g. for sensing treated area
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0242—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using non-visible light signals, e.g. IR or UV signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/028—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/10—Driver interactions by alarm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/32—Auto pilot mode
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0272—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising means for registering the travel distance, e.g. revolutions of wheels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L1/00—Arrangements for detecting or preventing errors in the information received
- H04L1/12—Arrangements for detecting or preventing errors in the information received by using return channel
- H04L1/16—Arrangements for detecting or preventing errors in the information received by using return channel in which the return channel carries supervisory signals, e.g. repetition request signals
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/50—Miscellaneous
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Electromagnetism (AREA)
- Sustainable Development (AREA)
- Robotics (AREA)
- Sustainable Energy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Nozzles For Electric Vacuum Cleaners (AREA)
- Manipulator (AREA)
- Motor Or Generator Frames (AREA)
Description
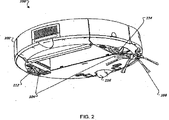
図1〜3は、例示的な自律網羅型ロボット100の上方斜視図、下方斜視図、および分解組立図を示す。ロボット100は、シャーシ102、駆動システム104、縁部掃除ヘッド106a、および制御装置108を有する。駆動システム104は、シャーシ102に搭載され、ロボット100を操縦するように構成された差動式駆動装置(ロボットの中心直径に近接するかまたはその直径の上にあり、別個に速度制御可能な左輪および右輪)である。縁部掃除ヘッド106aは、ロボット100の下方およびその直近の汚れおよびゴミを除去するために、さらに具体的にはロボットが前方向で掃除するときに汚れおよびゴミを主掃除ヘッド106bの掃除経路の中へ掃き込むために、シャーシ102の側縁を越えて延びるように取り付けられる。幾つかの実施態様では、主または縁部掃除ヘッド106b、106aは、表面処理を施すためにも使用可能である。制御装置108(図9Aにも図示されている)は、シャーシ102によって担持され、自律的様態で床を掃除または処理するために、下で説明するように、センサ読取り値または指示に基づいて指令をロボット100の構成要素に供給する行動規範型ロボットシステムによって制御される。蓄電池109がロボット100およびその副システム用の電源となりうる。底蓋110は、ロボット100の内側部分を保護しかつ汚れおよびゴミを締め出すことができる。
Claims (19)
- 自律カバレッジロボット(100、200、258、270、300)であって、
シャーシ(102)と、
前記シャーシ(102)に搭載され、前記ロボット(100、200、258、270、300)を操縦するように構成された駆動システム(104)と、
前記シャーシによって担持され、非水平軸回りに回転するように縁部掃除ヘッドモータ(118)によって駆動される縁部掃除ヘッド(106、214、274、316)であって、前記ロボット(100、200、258、270、300)が床を横切って操縦される間に前記床表面に係合するように、前記シャーシ(102)の横方向長さを越えて延びる縁部掃除ヘッド(106、214、274、316)と、
前記シャーシ(102)によって担持され、前記縁部掃除ヘッド(106、214、274、316)に関連するモータ電流を監視するように構成された制御装置(108)と、
を備え、
前記制御装置(108)は、前記床を横切って前記ロボット(100、200、258、270、300)を操縦し続ける間に、高いモータ電流に応答して前記縁部ヘッドモータ(118)を逆バイアスするように構成され、該逆バイアスは、前記縁部掃除ヘッドの回転を殆どニュートラルに維持するのに十分な程度の僅かな逆バイアスであることを特徴とする、ロボット。 - 前記制御装置(108)は、高い縁部掃除ヘッドモータ電流に応答して、前記ロボット(100、200、258、270、300)を後進させ、駆動方向を変更し、次いで前記ロボット(100、200、258、270、300)を前進させる、請求項1に記載のロボット。
- 前記縁部掃除ヘッド(106、214、274、316)は、前記シャーシの周縁を越えて延びる剛毛(122A〜F)を有するブラシ(120)を備え、かつ/または前記縁部掃除ヘッド(106、214、274、316)は、前記ロボット(100、200、258、270、300)の周縁上に配置される、請求項1または請求項2のいずれかに記載のロボット。
- 前記縁部掃除ヘッド(106、214、274、316)は、実質的に垂直な軸回りに回転する、請求項1〜3のいずれか1項に記載のロボット。
- 前記縁部掃除ヘッド(106、214、274、316)は、第1および第2の端部を有し、前記第1の端部回りに前記作業表面に垂直な回転軸を画定する少なくとも1つのブラシ要素(122A〜F)を具備する、請求項1〜4のいずれか1項に記載のロボット。
- 前記縁部掃除ヘッド(106、214、274、316)は、3つのブラシ要素(122A〜C)を備え、それぞれが、隣接するブラシ要素と約120度の角度(106d)を形成するか、または前記縁部掃除ヘッド(106、214、274、316)は、6つのブラシ要素(122A〜F)を備え、それぞれが隣接するブラシ要素と約60度の角度(106e)を形成する、請求項1〜5のいずれか1項に記載のロボット。
- 前記縁部掃除ヘッド(124)は、前記シャーシの周縁を越えて延びる回転可能な水切り(126)を備え、かつ/または前記縁部掃除ヘッド(106、214、274、316)は、前記縁部掃除ヘッドが回転すると、前記シャーシ(102)の周縁を越えて広がる複数の吸着繊維を備える、請求項1〜6のいずれか1項に記載のロボット。
- 前記シャーシ(102)によって担持され、前記ロボット(100、200、258、270、300)が床を横切って操縦される間に前記床表面に係合するように、水平軸回りに回転するように駆動される主掃除ヘッド(111、206、242、272、302)をさらに備え、前記制御装置(108)は、高い主掃除ヘッドモータ電流に応答して前記主掃除ヘッド(111、206、242、272、302)を逆バイアスするように構成され、他方では前記床を横切って前記ロボットを操縦し続ける、請求項1〜7のいずれか1項に記載のロボット。
- 前記制御装置(108)は、高い主掃除ヘッドモータ電流に応答して、前記ロボット(100、200、258、270、300)を後進させ、駆動方向を変更し、次いで前記ロボットを前進させる、請求項8に記載のロボット。
- 前記主掃除ヘッド(111、206、242、272、302)は、
前記作業表面に平行な長手回転軸を画定する円筒本体(117、202、246、24、276、278、304、306)と、
前記円筒本体(117、202、246、24、276、278、304、306)上に配置された剛毛(115)と、
前記円筒本体(117、202、246、24、276、278、304、306)に沿って長手方向に配置された柔軟フラップ(113)と、を備える、請求項8または請求項9に記載のロボット。 - 自律カバレッジロボット(100、200、258、270、300)の絡まりを解除する方法であって、
前記ロボット(100、200、258、270、300)を床表面の上に配置するステップと、
前記ロボットのシャーシ(102)によって担持され、縁部掃除ヘッドモータ(118)によって駆動される縁部掃除ヘッド(106、214、274、316)を非水平軸回りに回転させながら、前記ロボットが、前記ロボットの前方向へ前記床表面を自律的に横断することを可能にするステップと、を含み、前記縁部掃除ヘッドは前記シャーシ(102)の横方向長さを超えて延び、かつ前記床表面に係合し、
前記ロボット(100、200、258、270、300)は、前記床表面を横切って操縦し続ける間に、高い縁部掃除ヘッドモータ電流に応答して、別個に前記縁部掃除ヘッドモータ(118)に、前記縁部掃除ヘッドの回転を殆どニュートラルに維持するのに十分な程度の僅かな逆バイアスを与える、方法。 - 前記ロボット(100、200、258、270、300)は、高い掃除ヘッドモータ電流に応答して、別個に縁部掃除ヘッド(106、214、274、316)に逆バイアスを与える前に、前記前方向への前記ロボット自体の移動を決定する、請求項11に記載の方法。
- 前記ロボット(100、200、258、270、300)は、ある一定の時間、約2秒の時間のような間の高い縁部ヘッドモータ電流に応答して、別個に前記縁部掃除ヘッド(106、214、274、316)の回転を逆転する、請求項11または請求項12に記載の方法。
- 前記ロボット(100、200、258、270、300)は、前記縁部掃除ヘッド(106、214、274、316)に逆バイアスを与えた後で、逆方向へ移動し、駆動方向を変更し、次いで前記駆動方向へ移動する、請求項11または請求項12に記載の方法。
- 前記縁部掃除ヘッド(106、214、274、316)は、前記シャーシ(102)の周縁を越えて延びる剛毛を有するブラシを備え、かつ/または前記縁部掃除ヘッド(106、214、274、316)は実質的に垂直な軸回りに回転し、かつ/または前記縁部掃除ヘッド(106、214、274、316)は、第1および第2の端部を有し、前記第1の端部回りに前記作業表面に垂直な回転軸を画定する少なくとも1つのブラシ要素(122A〜F)を具備する、請求項11〜14のいずれか1項に記載の方法。
- 前記縁部掃除ヘッド(124)は、前記シャーシ(102)の周縁を越えて延びる回転可能な水切り(126)を具備し、かつ/または前記縁部掃除ヘッド(106、214、274、316)は、前記縁部掃除ヘッド(106、214、274、316)が回転すると、前記シャーシ(102)の周縁を越えて広がる複数の吸着繊維を具備する、請求項11〜15のいずれか1項に記載の方法。
- 前記ロボット(100、200、258、270、300)は、前記シャーシ(102)によって担持され、前記ロボットが床を横切って操縦される間に、前記床表面に係合するように水平軸回りに回転するように駆動される主掃除ヘッド(111、206、242、272、302)をさらに備え、前記ロボットは、前記床表面を横切って操縦し続ける間に、高い主掃除ヘッドモータ電流に応答して、別個に前記主掃除ヘッドに逆バイアスを与える、請求項11〜16のいずれか1項に記載の方法。
- 前記ロボット(100、200、258、270、300)は、高い主掃除ヘッドモータ電流に応答して、別個に前記主掃除ヘッド(111、206、242、272、302)を逆バイアスする前に、前記前方向への前記ロボットの移動を決定し、かつ/または前記ロボットは、ある一定の時間、約2秒のような間の高い掃除ヘッドモータ電流に応答して、別個に前記主掃除ヘッドの回転を逆転する、請求項17に記載の方法。
- 前記ロボット(100、200、258、270、300)は、前記主掃除ヘッド(111、206、242、272、302)を逆バイアスした後で、逆方向へ移動し、駆動方向を変更し、次いで前記駆動方向へ移動する、請求項17または請求項18に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US74144205P | 2005-12-02 | 2005-12-02 | |
| US60/741,442 | 2005-12-02 | ||
| PCT/US2006/046400 WO2007065033A2 (en) | 2005-12-02 | 2006-12-04 | Coverage robot mobility |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010282185A Division JP2011092750A (ja) | 2005-12-02 | 2010-12-17 | 自律型清掃ロボット |
| JP2011228703A Division JP5543951B2 (ja) | 2005-12-02 | 2011-10-18 | 自律型カバレッジロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009518073A JP2009518073A (ja) | 2009-05-07 |
| JP4875102B2 true JP4875102B2 (ja) | 2012-02-15 |
Family
ID=55409641
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008543548A Expired - Fee Related JP4875102B2 (ja) | 2005-12-02 | 2006-12-04 | カバレッジロボット移動性 |
Country Status (5)
| Country | Link |
|---|---|
| EP (2) | EP1969437B1 (ja) |
| JP (1) | JP4875102B2 (ja) |
| AT (1) | ATE442618T1 (ja) |
| DE (1) | DE602006009148D1 (ja) |
| WO (1) | WO2007065033A2 (ja) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US7429843B2 (en) | 2001-06-12 | 2008-09-30 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| KR101399170B1 (ko) | 2004-06-24 | 2014-05-27 | 아이로보트 코퍼레이션 | 자동 로봇 장치용의 원격 제어 스케줄러 및 방법 |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| DK1850725T3 (da) | 2005-02-18 | 2010-09-13 | Irobot Corp | Autonom overfladerensningsrobot til våd og tør rensning |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| DE602006009149D1 (de) | 2005-12-02 | 2009-10-22 | Irobot Corp | Modularer roboter |
| KR101214715B1 (ko) | 2005-12-02 | 2012-12-21 | 아이로보트 코퍼레이션 | 커버리지 로봇 이동성 |
| ES2623920T3 (es) | 2005-12-02 | 2017-07-12 | Irobot Corporation | Sistema de robot. |
| EP2544065B1 (en) | 2005-12-02 | 2017-02-08 | iRobot Corporation | Robot system |
| ES2583374T3 (es) | 2006-05-19 | 2016-09-20 | Irobot Corporation | Eliminación de residuos de robots de limpieza |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| JP2010526594A (ja) | 2007-05-09 | 2010-08-05 | アイロボット コーポレイション | 小型自律カバレッジロボット |
| CN108378771B (zh) | 2010-02-16 | 2021-06-11 | 艾罗伯特公司 | 真空吸尘器毛刷 |
| US9220386B2 (en) | 2011-04-29 | 2015-12-29 | Irobot Corporation | Robotic vacuum |
| US11471020B2 (en) | 2011-04-29 | 2022-10-18 | Irobot Corporation | Robotic vacuum cleaning system |
| JP5931533B2 (ja) * | 2012-03-26 | 2016-06-08 | 株式会社東芝 | 電気掃除機 |
| TWI508692B (zh) * | 2013-02-08 | 2015-11-21 | Self-propelled trailing machine | |
| US9326654B2 (en) | 2013-03-15 | 2016-05-03 | Irobot Corporation | Roller brush for surface cleaning robots |
| JP5771885B2 (ja) * | 2013-06-03 | 2015-09-02 | みこらった株式会社 | 電気掃除装置 |
| WO2015105712A1 (en) | 2014-01-10 | 2015-07-16 | Irobot Corporation | Autonomous mobile robot |
| WO2017133638A1 (zh) | 2016-02-03 | 2017-08-10 | 苏州宝时得电动工具有限公司 | 自移动设备及自移动设备的控制方法 |
| US10512384B2 (en) | 2016-12-15 | 2019-12-24 | Irobot Corporation | Cleaning roller for cleaning robots |
| JP6814625B2 (ja) | 2016-12-20 | 2021-01-20 | 株式会社マキタ | ロボットポリッシャ |
| CN106963297A (zh) * | 2017-04-27 | 2017-07-21 | 牛立庚 | 一种清洁机器人 |
| US10595624B2 (en) | 2017-07-25 | 2020-03-24 | Irobot Corporation | Cleaning roller for cleaning robots |
| CN114200928B (zh) * | 2018-05-15 | 2023-07-14 | 北京石头世纪科技股份有限公司 | 智能移动设备及其控制方法、存储介质 |
| CN209153450U (zh) * | 2018-10-15 | 2019-07-26 | 北京石头世纪科技股份有限公司 | 边刷和智能清洁设备 |
| US11109727B2 (en) | 2019-02-28 | 2021-09-07 | Irobot Corporation | Cleaning rollers for cleaning robots |
| CN110997251A (zh) * | 2019-05-16 | 2020-04-10 | 深圳市大疆创新科技有限公司 | 可拆装机器人 |
| DE102019218514A1 (de) * | 2019-11-28 | 2021-06-02 | BSH Hausgeräte GmbH | Roboter zur Oberflächenpflege, Seitenbürste sowie Verfahren zur Regelung eines seitlichen Abstands eines Roboters |
| CN111012255A (zh) * | 2019-12-30 | 2020-04-17 | 江苏美的清洁电器股份有限公司 | 一种集成部件、清洁机器人及清洁机器人系统 |
| EP4257301A4 (en) * | 2020-11-12 | 2024-08-21 | Yujin Robot Co Ltd | FUNCTIONAL SAFETY SYSTEM FOR ROBOTS |
| CN113576326B (zh) * | 2021-07-07 | 2023-01-24 | 北京顺造科技有限公司 | 一种自动清洁设备 |
| TWI823692B (zh) * | 2021-12-15 | 2023-11-21 | 威剛科技股份有限公司 | 消毒裝置 |
| CN115251767B (zh) * | 2022-07-27 | 2023-10-10 | 深圳乐生机器人智能科技有限公司 | 一种扫地机器人的避障装置及避障方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01180010A (ja) * | 1988-01-08 | 1989-07-18 | Sanyo Electric Co Ltd | 移動車 |
| KR910006885B1 (ko) * | 1988-08-15 | 1991-09-10 | 미쯔비시 덴끼 가부시기가이샤 | 전기소제기의 파워브러시 |
| JP2795384B2 (ja) * | 1991-07-24 | 1998-09-10 | 株式会社テック | 電気掃除機の吸込口体 |
| US5819367A (en) * | 1997-02-25 | 1998-10-13 | Yashima Electric Co., Ltd. | Vacuum cleaner with optical sensor |
| US5967747A (en) * | 1998-01-20 | 1999-10-19 | Tennant Company | Low noise fan |
| GB9917232D0 (en) * | 1999-07-23 | 1999-09-22 | Notetry Ltd | Method of operating a floor cleaning device |
| US6594844B2 (en) | 2000-01-24 | 2003-07-22 | Irobot Corporation | Robot obstacle detection system |
| US8412377B2 (en) * | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US6883201B2 (en) | 2002-01-03 | 2005-04-26 | Irobot Corporation | Autonomous floor-cleaning robot |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| EP2386924B1 (en) * | 2001-06-12 | 2019-05-29 | iRobot Corporation | Mobile robot |
| EP3043544B1 (en) * | 2002-09-13 | 2018-03-28 | iRobot Corporation | A navigational control system for a robotic device |
| US7146682B2 (en) * | 2003-01-31 | 2006-12-12 | The Hoover Company | Powered edge cleaner |
| US7805220B2 (en) * | 2003-03-14 | 2010-09-28 | Sharper Image Acquisition Llc | Robot vacuum with internal mapping system |
| KR100478681B1 (ko) * | 2003-07-29 | 2005-03-25 | 삼성광주전자 주식회사 | 바닥살균기능을 구비한 로봇청소기 |
| KR20110009270A (ko) * | 2004-01-28 | 2011-01-27 | 아이로보트 코퍼레이션 | 청소 장치용 데브리 센서 |
| JP2005230032A (ja) * | 2004-02-17 | 2005-09-02 | Funai Electric Co Ltd | 自律走行ロボットクリーナー |
-
2006
- 2006-12-04 EP EP20060839010 patent/EP1969437B1/en active Active
- 2006-12-04 DE DE200660009148 patent/DE602006009148D1/de active Active
- 2006-12-04 WO PCT/US2006/046400 patent/WO2007065033A2/en active Application Filing
- 2006-12-04 JP JP2008543548A patent/JP4875102B2/ja not_active Expired - Fee Related
- 2006-12-04 EP EP20100183383 patent/EP2270620B1/en active Active
- 2006-12-04 AT AT06839010T patent/ATE442618T1/de not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| WO2007065033A2 (en) | 2007-06-07 |
| DE602006009148D1 (de) | 2009-10-22 |
| JP2009518073A (ja) | 2009-05-07 |
| EP1969437A2 (en) | 2008-09-17 |
| EP2270620A3 (en) | 2013-05-29 |
| ATE442618T1 (de) | 2009-09-15 |
| EP2270620A2 (en) | 2011-01-05 |
| EP1969437B1 (en) | 2009-09-09 |
| WO2007065033A3 (en) | 2007-08-02 |
| EP2270620B1 (en) | 2014-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6436939B2 (ja) | 自律型掃除ロボット | |
| JP5856631B2 (ja) | 自律カバレッジロボット | |
| JP4875102B2 (ja) | カバレッジロボット移動性 | |
| US7441298B2 (en) | Coverage robot mobility | |
| AU2014202140A1 (en) | Autonomous coverage robots |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090909 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20100203 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111124 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4875102 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |