JP4851443B2 - 微小機械構造体 - Google Patents
微小機械構造体 Download PDFInfo
- Publication number
- JP4851443B2 JP4851443B2 JP2007512951A JP2007512951A JP4851443B2 JP 4851443 B2 JP4851443 B2 JP 4851443B2 JP 2007512951 A JP2007512951 A JP 2007512951A JP 2007512951 A JP2007512951 A JP 2007512951A JP 4851443 B2 JP4851443 B2 JP 4851443B2
- Authority
- JP
- Japan
- Prior art keywords
- flat plate
- plate portion
- elastic support
- support portion
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003287 optical effect Effects 0.000 claims description 59
- 229910052751 metal Inorganic materials 0.000 claims description 41
- 239000002184 metal Substances 0.000 claims description 41
- 230000004075 alteration Effects 0.000 claims description 22
- 238000012937 correction Methods 0.000 claims description 10
- 229910052782 aluminium Inorganic materials 0.000 claims description 9
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 claims description 9
- 239000007769 metal material Substances 0.000 claims description 9
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 claims description 6
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 claims description 4
- 229910052802 copper Inorganic materials 0.000 claims description 4
- 239000010949 copper Substances 0.000 claims description 4
- 229910045601 alloy Inorganic materials 0.000 claims description 3
- 239000000956 alloy Substances 0.000 claims description 3
- 229910052759 nickel Inorganic materials 0.000 claims description 3
- 238000000034 method Methods 0.000 description 24
- 239000010408 film Substances 0.000 description 21
- 230000008569 process Effects 0.000 description 16
- 238000006073 displacement reaction Methods 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 8
- 239000000758 substrate Substances 0.000 description 8
- 238000004544 sputter deposition Methods 0.000 description 7
- 239000010409 thin film Substances 0.000 description 6
- 229910000838 Al alloy Inorganic materials 0.000 description 5
- 239000004020 conductor Substances 0.000 description 5
- 238000000151 deposition Methods 0.000 description 5
- 238000005530 etching Methods 0.000 description 5
- 238000000059 patterning Methods 0.000 description 5
- 238000000206 photolithography Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 229920002120 photoresistant polymer Polymers 0.000 description 4
- 229920001721 polyimide Polymers 0.000 description 4
- 239000004642 Polyimide Substances 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000001020 plasma etching Methods 0.000 description 3
- 230000036544 posture Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 238000004528 spin coating Methods 0.000 description 3
- 238000003848 UV Light-Curing Methods 0.000 description 2
- 238000000708 deep reactive-ion etching Methods 0.000 description 2
- 230000008021 deposition Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005304 joining Methods 0.000 description 2
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 239000011800 void material Substances 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012776 electronic material Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005496 eutectics Effects 0.000 description 1
- 229910052732 germanium Inorganic materials 0.000 description 1
- GNPVGFCGXDBREM-UHFFFAOYSA-N germanium atom Chemical compound [Ge] GNPVGFCGXDBREM-UHFFFAOYSA-N 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- JVPLOXQKFGYFMN-UHFFFAOYSA-N gold tin Chemical compound [Sn].[Au] JVPLOXQKFGYFMN-UHFFFAOYSA-N 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005459 micromachining Methods 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 229920005591 polysilicon Polymers 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0841—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting element being moved or deformed by electrostatic means
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1362—Mirrors
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1392—Means for controlling the beam wavefront, e.g. for correction of aberration
- G11B7/13925—Means for controlling the beam wavefront, e.g. for correction of aberration active, e.g. controlled by electrical or mechanical means
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Micromachines (AREA)
- Optical Head (AREA)
Description
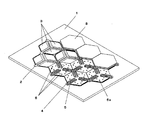
まず、図1を参照しながら、本発明による微小機械構造体の第1の実施形態を説明する。図1は、本実施形態の微小機械構造体示す分解斜視図であり、ミラーの一部を切り欠き、下部のリブ構造が見えるように記載されている。
実施形態1において、3つの弾性支持部5および可動電極6は同一面上に位置し、同一の導電材料から形成されている。弾性支持部および可動電極の平面レイアウトは、実施形態1におけるものに限定されない。
可動電極の形状は、六角形である必要はない。図7は、正方形の可動電極36を示している。本実施形態では、正方形状の可動電極36の外周に沿って、4本の支柱34から弾性支持部35が延長し、可動電極36に連結している。可動電極36の下方には、破線で示される4つの固定電極33が配置されている。
図8は、本発明の微小機械構造体を備える光ピックアップの構成例を示し、図9は、当該光ピックアップを備える光ディスク装置の構成例を示している。
図10は、本発明によるレーザプロジェクタの実施形態を示す構成図である。
2 グランド電極
3 固定電極
4 支柱
5 弾性支持部材
6 可動電極
7 垂直リブ
8 ミラー
10、12、14 犠牲層
11、13 ビア
15 トレンチ
17、18 空隙
81 半導体レーザ
82 コリメートレンズ
83 偏光ビームスプリッタ
84 4分の1波長板
85 マイクロミラーアレイデバイス
87 光ディスク
86 対物レンズ
88 アクチュエータ
200 光ディスク
300 光ピックアップ
302 ディスクモータ
304 ドライバアンプ
306 フロントエンド信号処理部
308 エンコーダ/デコーダ
309 CPU
310 サーボ制御部
100 レーザプロジェクタ
101 レーザ光源
102 コリメートレンズ
103 ダイクロイックプリズム
104 投射ビーム
105 ハーフミラー
106 スキャンミラー部
107 開口
110 画像信号
111 制御部
112 レーザ変調回路
113 ミラー駆動部
120 スクリーン
Claims (13)
- 基台と、
前記基台上に形成された弾性を有する弾性支持部と、
前記基台に対して相対的に移動可能なように前記弾性支持部によって支持される可動部と、
を備え、
前記可動部は、
第1の空隙を介して前記基台に対向する第1の平板部と、
連結部を有し、前記連結部を介して前記第1の平板部に固定されている第2の平板部と、
を備え、
前記弾性支持部と前記第1の平板部が同一平面上に形成され、かつ、前記弾性支持部は前記第1の平坦部と一体的化されており、
前記第2の平板部は、前記弾性支持部の少なくとも一部を覆う形状を有しており、
前記連結部は前記第2の平板部から前記第1の平板部に向かって突出する垂直リブであって、
前記垂直リブは、前記第1の平板部に接触するように第1の高さを有する部分と、前記弾性支持部に対して第2の空隙を介して対向するように前記第1の高さよりも小さい第2の高さを有する部分とを有し、前記弾性支持部に接触していない、微小機械構造体。 - 前記第2の平板部の少なくとも一部に光反射面を備える、請求項1に記載の微小機械構造体。
- 前記第2の空隙は前記第1の空隙よりも狭い請求項1に記載の微小機械構造体。
- 前記第1の平板部および前記弾性支持部は、同一の金属材料から形成され、同一の厚さを有している、請求項1に記載の微小機械構造体。
- 前記第2の平板部および前記連結部は、同一の金属材料から形成されている、請求項1に記載の微小機械構造体。
- 前記第2の平板部の面積は、100μm2以上1mm2以下である、請求項1に記載の微小機械構造体。
- 前記第1の平板部および前記第2の平板部は、それぞれ、0.1μm以上5μm以下の厚さを有し、
前記連結部は0.2μm以上10μm以下の厚さを有している、請求項1に記載の微小機械構造体。 - 前記連結部は、前記第1の平板部上の犠牲層の溝に埋め込まれた金属材料から形成されている請求項1に記載の微小機械構造体。
- 前記金属材料が、アルミ、銅、ニッケル、およびそれらの少なくとも1種の金属を含有する合金のいずれかである請求項8に記載の微小機械構造体。
- 前記基台上に設けられ、前記第1の平板部と第3の空隙を介して対向する固定電極を更に備え、
前記第1の平板部および前記固定電極が静電アクチュエータとして機能する請求項1に記載の微小機械構造体。 - 光ビームを放射する光源と、
前記光ビームを光ディスク上に集束する対物レンズと、
前記光ディスクから反射された光ビームを受け、電気信号を生成する光検出器と、
前記光ビームの収差を補正する収差補正素子と、
を備える光ピックアップであって、
前記収差補正素子は、
基台と、
前記基台上に形成された弾性を有する弾性支持部と、
前記基台に対して相対的に移動可能なように前記弾性支持部によって支持される可動部と、
を備え、
前記可動部は、
第1の空隙を介して前記基台に対向する第1の平板部と、
少なくとも1つの垂直リブを有し、前記垂直リブを介して前記第1の平板部に固定されている第2の平板部と、
を備え、
前記弾性支持部と前記第1の平板部が同一平面上に形成され、かつ、前記弾性支持部は前記第1の平坦部と一体的化されており、
前記第2の平板部は、前記弾性支持部の少なくとも一部を覆う形状を有しており、
前記連結部は前記第2の平板部から前記第1の平板部に向かって突出する垂直リブであって、
前記垂直リブは、前記第1の平板部に接触するように第1の高さを有する部分と、前記弾性支持部に対して第2の空隙を介して対向するように前記第1の高さよりも小さい第2の高さを有する部分とを有し、前記弾性支持部に接触していない、光ピックアップ。 - 光ディスクを回転させるモータと、
前記光ディスクの所望トラックにアクセスする光ピックアップと、
光ピックアップの出力に基づいて前記光ディスクからデータを再生する信号処理部と、
を備える光ディスク装置であって、
前記光ピックアップは、
光ビームを放射する光源と、
前記光ビームを光ディスク上に集束する対物レンズと、
前記光ディスクから反射された光ビームを受け、電気信号を生成する光検出器と、
前記光ビームの収差を補正する収差補正素子と、
を備え、
前記収差補正素子は、
基台と、
前記基台上に形成された弾性を有する弾性支持部と、
前記基台に対して相対的に移動可能なように前記弾性支持部によって支持される可動部と、
を備え、
前記可動部は、
第1の空隙を介して前記基台に対向する第1の平板部と、
少なくとも1つの垂直リブを有し、前記垂直リブを介して前記第1の平板部に固定されている第2の平板部と、
を備え、
前記弾性支持部と前記第1の平板部が同一平面上に形成され、かつ、前記弾性支持部は前記第1の平坦部と一体的化されており、
前記第2の平板部は、前記弾性支持部の少なくとも一部を覆う形状を有しており、
前記連結部は前記第2の平板部から前記第1の平板部に向かって突出する垂直リブであって、
前記垂直リブは、前記第1の平板部に接触するように第1の高さを有する部分と、前記弾性支持部に対して第2の空隙を介して対向するように前記第1の高さよりも小さい第2の高さを有する部分とを有し、前記弾性支持部に接触していない、光ディスク装置。 - 光ビームを放射する光源と、
画像信号に応じて前記光ビームの強度を変調する光源駆動部と、
前記光ビームでスクリーンを走査するスキャンミラー部と、
を備える表示装置であって、
前記スキャンミラー部は、
基台と、
前記基台上に形成された弾性を有する弾性支持部と、
前記基台に対して相対的に移動可能なように前記弾性支持部によって支持される可動部と、
を備え、
前記可動部は、
第1の空隙を介して前記基台に対向する第1の平板部と、
少なくとも1つの垂直リブを有し、前記垂直リブを介して前記第1の平板部に固定されている第2の平板部と、
を備え、
前記弾性支持部と前記第1の平板部が同一平面上に形成され、かつ、前記弾性支持部は前記第1の平坦部と一体的化されており、
前記第2の平板部は、前記弾性支持部の少なくとも一部を覆う形状を有しており、
前記連結部は前記第2の平板部から前記第1の平板部に向かって突出する垂直リブであって、
前記垂直リブは、前記第1の平板部に接触するように第1の高さを有する部分と、前記弾性支持部に対して第2の空隙を介して対向するように前記第1の高さよりも小さい第2の高さを有する部分とを有し、前記弾性支持部に接触しておらず、
前記第2の平板部が前記光ビームを反射するミラーとして機能する、表示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007512951A JP4851443B2 (ja) | 2005-04-11 | 2006-04-06 | 微小機械構造体 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005113210 | 2005-04-11 | ||
| JP2005113210 | 2005-04-11 | ||
| PCT/JP2006/307363 WO2006109687A1 (ja) | 2005-04-11 | 2006-04-06 | 微小機械構造体 |
| JP2007512951A JP4851443B2 (ja) | 2005-04-11 | 2006-04-06 | 微小機械構造体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2006109687A1 JPWO2006109687A1 (ja) | 2008-11-13 |
| JP4851443B2 true JP4851443B2 (ja) | 2012-01-11 |
Family
ID=37086962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007512951A Expired - Fee Related JP4851443B2 (ja) | 2005-04-11 | 2006-04-06 | 微小機械構造体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7742219B2 (ja) |
| JP (1) | JP4851443B2 (ja) |
| CN (1) | CN101137923A (ja) |
| WO (1) | WO2006109687A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5521359B2 (ja) | 2008-03-13 | 2014-06-11 | セイコーエプソン株式会社 | 光偏向器及びその製造方法 |
| WO2011080883A1 (ja) * | 2009-12-28 | 2011-07-07 | 株式会社ニコン | 電気機械変換器、空間光変調器、露光装置およびそれらの製造方法 |
| JP5630015B2 (ja) * | 2009-12-28 | 2014-11-26 | 株式会社ニコン | 空間光変調器、露光装置およびそれらの製造方法 |
| JP4951724B2 (ja) * | 2010-09-24 | 2012-06-13 | 貴央 山口 | 反射型表示装置 |
| WO2015156859A2 (en) * | 2014-01-13 | 2015-10-15 | Board Of Regents, The University Of Texas System | Surface micromachined microphone with broadband signal detection |
| US10055791B2 (en) * | 2014-10-31 | 2018-08-21 | Trading Technologies International, Inc. | Trading availability utilizing alternate messaging channels |
| CN106526785B (zh) * | 2016-12-27 | 2017-09-12 | 西安交通大学 | 偏转轴相交于反射镜表面的低高度双轴偏转装置及方法 |
| CN110799882A (zh) * | 2017-07-06 | 2020-02-14 | 浜松光子学株式会社 | 光学器件 |
| US10831018B2 (en) * | 2017-12-08 | 2020-11-10 | Texas Instruments Incorporated | Methods and apparatus for increasing efficiency and optical bandwidth of a microelectromechanical system piston-mode spatial light modulator |
| US10474296B1 (en) * | 2018-07-12 | 2019-11-12 | Microvision, Inc. | Laser scanning devices and methods with touch detection |
| CN109151271A (zh) * | 2018-08-22 | 2019-01-04 | Oppo广东移动通信有限公司 | 激光投射模组及其控制方法、图像获取设备和电子装置 |
| CN112305753B (zh) * | 2020-11-11 | 2024-03-26 | 中国科学院上海技术物理研究所 | 一种微镜结构和制作方法、微镜阵列及探测器 |
| CN113281898B (zh) * | 2021-05-25 | 2022-08-05 | 中国科学院上海微系统与信息技术研究所 | Mems微镜单元及mems微镜阵列 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000182136A (ja) * | 1998-12-14 | 2000-06-30 | Sanden Corp | 自動販売機の商品搬出装置 |
| WO2002061488A1 (en) * | 2001-01-30 | 2002-08-08 | Matsushita Electric Industrial Co., Ltd. | Variable mirror and information apparatus comprising variable mirror |
| JP2004109446A (ja) * | 2002-09-18 | 2004-04-08 | Seiko Epson Corp | 光スイッチング素子の製造方法、および光スイッチング素子 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5535047A (en) | 1995-04-18 | 1996-07-09 | Texas Instruments Incorporated | Active yoke hidden hinge digital micromirror device |
| CN100351670C (zh) | 1995-06-02 | 2007-11-28 | 松下电器产业株式会社 | 激光投影装置 |
| JP4602542B2 (ja) | 2000-12-18 | 2010-12-22 | オリンパス株式会社 | 光偏向器用のミラー揺動体 |
| US7557932B2 (en) * | 2005-04-19 | 2009-07-07 | Texas Instruments Incorporated | Characterization of micromirror array devices using interferometers |
-
2006
- 2006-04-06 US US11/910,773 patent/US7742219B2/en not_active Expired - Fee Related
- 2006-04-06 WO PCT/JP2006/307363 patent/WO2006109687A1/ja active Application Filing
- 2006-04-06 CN CNA2006800081318A patent/CN101137923A/zh active Pending
- 2006-04-06 JP JP2007512951A patent/JP4851443B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000182136A (ja) * | 1998-12-14 | 2000-06-30 | Sanden Corp | 自動販売機の商品搬出装置 |
| WO2002061488A1 (en) * | 2001-01-30 | 2002-08-08 | Matsushita Electric Industrial Co., Ltd. | Variable mirror and information apparatus comprising variable mirror |
| JP2004109446A (ja) * | 2002-09-18 | 2004-04-08 | Seiko Epson Corp | 光スイッチング素子の製造方法、および光スイッチング素子 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2006109687A1 (ja) | 2008-11-13 |
| WO2006109687A1 (ja) | 2006-10-19 |
| CN101137923A (zh) | 2008-03-05 |
| US7742219B2 (en) | 2010-06-22 |
| US20090279163A1 (en) | 2009-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4851443B2 (ja) | 微小機械構造体 | |
| JP4921366B2 (ja) | 微小機械構造体システムおよびその製造方法 | |
| US6914711B2 (en) | Spatial light modulator with hidden comb actuator | |
| US7522330B2 (en) | High fill ratio silicon spatial light modulator | |
| US7453624B2 (en) | Projection display system including a high fill ratio silicon spatial light modulator | |
| US7654677B2 (en) | Yokeless hidden hinge digital micromirror device | |
| US8908255B2 (en) | Fabrication of a high fill ratio silicon spatial light modulator | |
| US7428094B2 (en) | Fabrication of a high fill ratio reflective spatial light modulator with hidden hinge | |
| JP2005121906A (ja) | 反射型光変調アレイ素子及び露光装置 | |
| US7923789B2 (en) | Method of fabricating reflective spatial light modulator having high contrast ratio | |
| JPWO2007023940A1 (ja) | アクチュエータ、光ヘッド装置および光情報装置 | |
| JP4452560B2 (ja) | 透過型光変調素子及び透過型光変調アレイ素子 | |
| JP2006526806A (ja) | 隠れヒンジを備えた高充填率反射型空間光変調器の作製 | |
| JP2004109446A (ja) | 光スイッチング素子の製造方法、および光スイッチング素子 | |
| JP2007248809A (ja) | ミラー素子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110901 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110927 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111020 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4851443 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |