以下、本発明の最良の実施の形態について図面を参照して説明する。
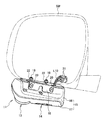
図1は、本発明に係る後付用側方視認支援ユニット10の適用例を模式的に示す説明図である。本発明に係る後付用側方視認支援ユニット10は、図1に示すように、乗員特に運転手による車両側方の視認を支援するものであり、ナビゲーションシステム50が搭載された車両Cに適用可能とされている。
このナビゲーションシステム50は、表示手段としてのモニタ51と、該モニタ51の表示内容を制御する制御手段としてのナビ制御部52と、車両Cの周辺を撮像する撮像手段としてのカメラ(本実施の形態では、車両Cの後方を撮像する後方カメラ53)とを備える。ナビ制御部52には、接続線L1を介してモニタ51に接続されるとともに、接続線L2(一点鎖線で示す。)を介して後方カメラ53に接続される。また、接続線L3(一点鎖線で示す。)を介して車両Cの情報を取得するための車両情報源54が接続される。このナビゲーションシステム50は、ナビ制御部52の制御により、図示を略す操作部等に為された操作に応じてモニタ51に地図情報等を表示する構成とされている。また、ナビ制御部52は、車両Cの後方映像の表示が必要であると判断すると、後方カメラ53により撮像された車両Cの後方画像をモニタ51に表示させる。このナビゲーションシステム50が搭載された車両Cに後付用側方視認支援ユニット10が適用される。
後付用側方視認支援ユニット10は、車両Cの側方を撮像するカメラ機構11と、この後付用側方視認支援ユニット10を制御する制御機構12とを備える。
カメラ機構11は、車両Cに設けられたサイドミラーSMに取り付け可能とされている。以下では、車両Cには、進行方向右側に運転席が設けられているものとし、カメラ機構11を進行方向左側に設けられたサイドミラーSMに取り付けるものとする。これは、車両Cの左側方が運転手から死角になる領域が大きいことによる。また、以下では、車両Cは、左側通行の道路を走行しているものとする。
カメラ機構11は、車両Cの左斜め前の側方を撮像可能であるように、左側のサイドミラーSMに取り付けられる(図1ないし図4参照)。サイドミラーSMに取り付けられたカメラ機構11は、接続線L4を介して車体に設けられた制御機構12に接続されている。この接続線L4は、図示は略すがサイドミラーSMからドアパネルを経て車体へと配線されているサイドミラーSMの駆動機構のための接続線に沿って配設される。接続線L4は、車体からカメラ機構11への電力供給を行うとともに、カメラ機構11により撮像された画像データを制御機構12へ送信するものである。
この制御機構12は、車両情報源54からナビゲーションシステム50のナビ制御部52への電路(伝達経路)上に介在するように設けられている。この例では、車両情報源54とナビ制御部52とを繋ぐ接続線L3が、車両情報源54側の接続線L3´とナビ制御部52側の接続線L3´´とに分断され、この接続線L3´および接続線L3´´が制御機構12に接続されている。
また、制御機構12は、後方カメラ53からナビゲーションシステム50のナビ制御部52への電路(伝達経路)上に介在するように設けられている。この例では、後方カメラ53とナビ制御部52とを繋ぐ接続線L2が、後方カメラ53側の接続線L2´とナビ制御部52側の接続線L2´´とに分断され、この接続線L2´および接続線L2´´が制御機構12に接続されている。
換言すると、ナビゲーションシステム50では、上記した構成において、接続線L1を介してナビ制御部52に接続されたモニタ51を除いた総ての構成部材が、制御機構12を経由してナビ制御部52に接続されることとなる。
制御機構12およびナビ制御部52は、接続線L3´および接続線L3´´により、車両情報源54からの各種信号を取得することが可能とされている。また、制御機構12は、接続線L3´´により、ナビ制御部52へと信号を送ることが可能とされている。さらに、制御機構12は、接続線L2´および接続線L2´´により、後方カメラ53およびカメラ機構11により撮像された画像を適宜選択してナビ制御部52へと送信可能とされている。
この制御機構12には、図示は略すが操作部が接続されている。制御機構12は、操作部(図示せず)への操作、車両情報源54からの情報等に基づいて、車両Cの側方画像を表示させる必要があると判断すると、カメラ機構11により撮像された側方画像をナビ制御部52へ出力するとともに、自らに入力された画像(当該側方画像)をモニタ51に表示させるための信号をナビ制御部52に送る。
また、制御機構12は、操作部(図示せず)への操作、車両情報源54からの情報等に基づいて、車両Cの側方画像を表示させる必要がないと判断すると、車両情報源54からの情報をそのままナビ制御部52に出力するとともに、後方カメラ53からの後方画像をナビ制御部52へと出力する。これにより、ナビゲーションシステム50では、後付用側方視認支援ユニット10が取り付けられていない状態と同様な状態となり、ナビ制御部52の制御に基づいて、地図情報、後方画像等を適宜モニタ51に表示させることができる。
このように、後付用側方視認支援ユニット10では、車両Cに取り付けることで、車両Cに予め搭載されていたナビゲーションシステム50を利用して側方視認支援システムを構築することができる。すなわち、後付用側方視認支援ユニット10では、既存のナビゲーションシステム50の機能を活かしつつ、必要に応じてカメラ機構11が撮像した車両Cの側方画像をナビゲーションシステム50のモニタ51に表示させることができる。
また、後付用側方視認支援ユニット10では、車両CのサイドミラーSMにカメラ機構11を取り付け、ナビゲーションシステム50として配設された接続線に割り込ませるように制御機構12を接続し、このカメラ機構11と制御機構12とを接続するだけであることから、コストの増加を招くことなく容易に車両Cに適用することができる。このように、後付用側方視認支援ユニット10では、既存のナビゲーションシステム50において、カメラ(53)からナビ制御部(52)に至る電路(伝達経路)に制御機構12を割り込ませて、ナビ制御部(52)がモニタ(51)に表示させる画像を制御機構12に制御させることで、適宜カメラ機構11からの画像をモニタ(51)に表示させるものであることから、モニタ(51)と、車両Cの周辺映像を撮像するカメラ(53)と、これらを制御するナビ制御部(52)をと備えるナビゲーションシステム(50)が搭載された車両Cであれば、ナビゲーションシステムの種類および車種に拘わらず、コストの増加を招くことなく容易に車両Cに適用することができる。
さらに、後付用側方視認支援ユニット10では、予め設けられていたナビゲーションシステム50を利用するものであることから、車両の内部空間を有効利用することができる。
ついで、後付用側方視認支援ユニット10では、予め設けられていたナビゲーションシステム50のモニタ51に側方画像を表示させることができるので、乗員特に運転手が安全かつ容易に側方画像を視認することができる。
次に、後付用側方視認支援ユニット10の一実施例について図面を参照して説明する。
後付用側方視認支援ユニット10が適用される車両Cは、本実施例では、上記したものと同様の構成であり、同様のナビゲーションシステム50が装備されている。
ここで、図2は、後付用側方視認支援ユニット10が適用された車両Cおよびその側方画像の様子を模式的に示す斜視図である。また、図3は、図2に示す矢印Aaから見たカメラ機構11を模式的に示す斜視図であり、図4は、図2に示す矢印Abから見たカメラ機構11を模式的に示す斜視図である。この図3および図4では、理解容易のためにサイドミラーSMは二点鎖線で示している。さらに、図5は、図4のカメラ機構11のサイドミラーSMへの取り付けの様子を分解して示す斜視図である。図6は、図5に示すI−I線に沿って得られた模式的な断面図であり、図7は、図5に示すII−II線に沿って得られた模式的な断面図であり、図8は、図5に示すIII−III線に沿って得られた模式的な断面図である。
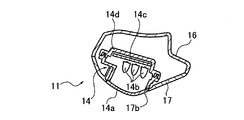
後付用側方視認支援ユニット10のカメラ機構11は、図3および図4に示すように、CCDカメラ13と、赤外線ユニット14とが、カメラケース15に収容されて構成されている。
カメラケース15は、上方ケース部16と下方ケース部17とが上下方向に連結されて構成されている。上方ケース部16は、図5に示すように、カメラケース15においてサイドミラーSMへの取付個所となる。この上方ケース部16には、後述するブラケット18のサイドミラーSMへの固定に用いられる2つのボルト19の頭部の受け入れのため(図6参照)の凹所16aが2つ設けられている。また、上方ケース部16には、当該上方ケース部16に後述するブラケット18を固定するのに用いられる2つのネジ部材20の螺合のため(図7参照)の貫通孔16bが2つ設けられている。
この上方ケース部16に装着される下方ケース部17には、図3に示すように、CCDカメラ13のためのカメラ設置孔17aと、赤外線ユニット14のための照射開口17bとが設けられている。カメラ設置孔17aには、図6および図7に示すように、CCDカメラ13のレンズ部分13aが露出するように当該CCDカメラ13が装着されている。照射開口17bには、図8に示すように、後述する赤外線ユニット14の透過板部14aが面一となるように当該赤外線ユニット14が装着されている。
この赤外線ユニット14は、図8に示すように、光源部14bが取り付けられた基板14cが筐体14dに収容されて構成されており、この筐体14dの下端に透過板部14aが装着されている。この透過板部14aは、筐体14d内部を遮蔽しつつその光源部14bから出射される赤外線による照射を許すものである。
CCDカメラ13は、一定の領域を撮像可能とされており(図2参照)、赤外線ユニット14は、CCDカメラ13による撮像領域を赤外線で照射可能とされている。この赤外線ユニット14(その光源部14b)による赤外線の照射は、夜間等の暗闇でのCCDカメラ13による撮像のために行われる。この赤外線ユニット14による赤外線の照射は、カメラ機構11が動作状態とされている間、すなわち後述するように車両Cの電装品が動作状態とされている間は、常に行われる設定とされているが、赤外線であることから視認されることはない。
このCCDカメラ13および赤外線ユニット14には、接続線L10の一方の端部が接続されている。この接続線L10の他方の端部は、図5に示すように、上方ケース部16に設けられた開口16cを経て、カメラケース15の外部へと引き出されており、接続のためのソケット21が装着されている。
このカメラ機構11は、図5に示すように、ブラケット18を介してサイドミラーSMに取り付けられる。このブラケット18は、上方ケース部16の上面と後側面とに当接すべくL字状とされている。ブラケット18には、その上壁部18aにボルト孔18cが2つ設けられ、側壁部18bにネジ孔18dが2つ設けられている。
このカメラ機構11の取り付けのために、サイドミラーSMの下壁部に、ボルト19の挿通のための2つの貫通孔SMaと、カメラケース15の外部へと引き出された接続線L10およびそのソケット21のための貫通孔SMbとを設ける。
その後、ブラケット18の2つのボルト孔18cのそれぞれにボルト19を挿通し、このボルト19をサイドミラーSMの下壁部に設けた各貫通孔SMaに挿通し、それぞれにナット22を螺合する(矢印t1参照)。このように、各ボルト19と各ナット22とで、サイドミラーSMの下壁部およびブラケット18の上壁部を共締めさせることで、ブラケット18をサイドミラーSMに取り付ける。
このブラケット18に上方ケース部16を宛がった状態で、サイドミラーSMの下壁部に設けた貫通孔SMbにソケット21および接続線L10を挿通する(矢印t2参照)。その後、ブラケット18の2つのネジ孔18dのそれぞれにネジ部材20を挿通し、このネジ部材20を上方ケース部16の貫通孔16bに螺合する(矢印t3参照)。これにより、カメラ機構11を、サイドミラーSMに固着することができる。
このような構成であることから、カメラ機構11は、サイドミラーの形状に拘わらず、当該サイドミラーに適切に取り付けることができる。また、必要であれば、上方ケース部16とサイドミラーとの間に隙間を埋めるためのパッキン23(図6および図7参照)等を介在させてもよい。ここで、カメラ機構11は、サイドミラーの幅寸法(車幅方向に略沿う方向)および厚さ寸法(車両Cの前後方向に略沿う方向)よりも小さく形成されている。
この後、従来良く知られた方法で、車両Cにおいて、サイドミラーSMからドアパネルを経て車体へと配線した接続線L11(図9参照)の一端L11aを、カメラケース15の外部へと引き出された接続線L10のソケット21に接続する。図9に示すように、接続線L11の他端11bには、後付用側方視認支援ユニット10の制御機構12が接続される。このため、接続線L11および接続線L10は、図1の接続線L4に相当する。ここで、図9は、制御機構12の構成を説明するための説明図である。
後付用側方視認支援ユニット10の制御機構12は、図示を略すCPUが制御部筐体12aに収容されて構成されている。制御部筐体12aには、後方カメラ用入力端子T1と、カメラ機構用入力端子T2と、スイッチ接続端子T3と、車両情報入力端子T4と、電源入力端子T5と、画像データ出力端子T6と、車両情報出力端子T7とが設けられている。
後方カメラ用入力端子T1には、既存のナビゲーションシステム50として予め車両Cに設けられている後方カメラ53からの接続線L12(図1の接続線L2に相当する。)が接続される。この接続線L12は、制御機構12が取り付けられる前は、ナビ制御部52の後述する後方カメラ用入力個所56に接続されていたものである。制御機構12は、この後方カメラ用入力端子T1に接続された後方カメラ53に電力を供給するとともに当該後方カメラ53により取得された画像データを適宜画像データ出力端子T6から出力することができる。
カメラ機構用入力端子T2には、上記したようにサイドミラーSMに取り付けられたカメラ機構11からの接続線L11が接続される。制御機構12は、このカメラ機構用入力端子T2に接続されたカメラ機構11に電力を供給するとともに当該カメラ機構11のCCDカメラ13により取得された画像データを適宜画像データ出力端子T6から出力することができる。
スイッチ接続端子T3には、スイッチSWからの接続線L13が接続される。スイッチSWは、後付用側方視認支援ユニット10の取り付けにより既存のナビゲーションシステム50と協働して構築される側方視認支援システムの操作部であり、本実施例では、押すと導通状態(以下、ON状態という。)となり、離すと(押圧をやめると)非導通状態(以下、OFF状態という。)へと復帰するプッシュスイッチが用いられている。
車両情報入力端子T4には、既存のナビゲーションシステム50のナビ制御部52に接続されていた車両情報源54(図1参照)からの接続線L14(図1の接続線L3に相当する。)が接続される。本実施例では、車両情報源54として、車両Cの速度の情報である車速パルスのための車速パルス信号線(L14a側)と、車両Cの変速ギア(図示せず)がリバース(バック)へと切り換えられたときにON状態となるリバース信号(後退信号)のためのリバース信号線(L14b側)とが選択されている。
車速パルス信号線(L14a側)からの車速パルスは、制御機構12(そのCPU(図示せず))およびナビ制御部52が車両Cの走行速度を認識するために用いられる。また、リバース信号線(L14b側)からのリバース信号は、制御機構12(そのCPU(図示せず))およびナビ制御部52が、車両Cが通常走行しているか後退しているかを判断するために用いられる。制御機構12は、この車両情報入力端子T4に接続された車速パルス信号線(L14a側)からの車速パルスと、リバース信号線(L14b側)からのリバース信号とを認識することができる。
電源入力端子T5には、車両Cの電源供給源(図示せず)からの接続線L15が接続される。制御機構12は、この電源入力端子T5に接続された電源供給源(図示せず)からの電力供給により動作可能とされている。
画像データ出力端子T6には、後述するように制御機構12(そのCPU(図示せず))が、後方カメラ53またはカメラ機構11から取得した画像データを、選択的にナビゲーションシステム50のナビ制御部52へと出力すべく、当該ナビ制御部52の後方カメラ用入力端子T1への接続線L16(図1の接続線L2´´に相当する。)が接続される。
車両情報出力端子T7には、車両情報源54としてナビゲーションシステム50のナビ制御部52に入力されていた車速パルス信号線(L14a側)からの車速パルス信号と、リバース信号線(L14b側)からのリバース信号とを、ナビ制御部52へと出力すべく、ナビ制御部52の後述する車両情報入力個所55に接続される接続線L17(図1の接続線L3´に相当する。)が接続される。このナビ制御部52の車両情報入力個所55に接続される接続線L17は、制御機構12が取り付けられる前は、車両情報源54すなわち車速パルス信号線(L14a側)およびリバース信号線(L14b側)に接続されていたものである。
制御機構12(そのCPU(図示せず))は、後述する側方視認支援制御を行っていない状態では、後方カメラ用入力端子T1からの画像データを、画像データ出力端子T6から出力可能な状態としつつ、取得している車速パルス信号と、ON状態の仮想リバース信号とを、車両情報出力端子T7から出力する。
制御機構12は、このような状態において、スイッチSWがON状態とされたことを認識すると、車両Cの走行速度が所定の値未満である場合、画像データ出力端子T6から出力可能な状態とする画像データの入力先を、後方カメラ用入力端子T1からカメラ機構用入力端子T2に切り換える。これに伴って、制御機構12は、取得している車速パルス信号と、ON状態の仮想リバース信号とを車両情報出力端子T7から出力する。これは以下のことによる。
先ず、ナビゲーションシステム50のナビ制御部52には、図1および図9に示すように、車両情報源54からの接続線(L3)の接続のための車両情報入力個所55と、後方カメラ53からの接続線(L2)の接続のための後方カメラ用入力個所56とが設けられている。ナビゲーションシステム50のナビ制御部52では、車両Cが後退している場面において、後方カメラ用入力個所56から入力された画像データに基づく画像をモニタ51に表示させる構成とされている。この車両Cが後退している場面の判断は、ナビ制御部52では、上述したリバース信号線(図示せず)からのリバース信号がON状態である、すなわち車両情報入力個所55に入力される信号がON状態であることにより行われる。この場合、ナビ制御部52は、後方カメラ用入力個所56から入力された画像データに基づく画像をモニタ51に表示させる構成とされている。このため、図9に示すように、制御機構12は、ナビ制御部52の車両情報入力個所55にON状態の仮想リバース信号を出力するとともに、ナビ制御部52の後方カメラ用入力端子T1に任意の画像データを出力することにより、ナビ制御部52に、後方カメラ用入力個所56から入力された任意の画像データに基づく任意の画像をモニタ51に表示させることができる。このため、ON状態の仮想リバース信号とは、ON状態のリバース信号に等しい信号であればよく、このON状態の仮想リバース信号が仮想所定信号となる。これらのことから、制御機構12が、画像データ出力端子T6から出力可能な状態とする画像データの入力先をカメラ機構用入力端子T2にするとともに、ON状態の仮想リバース信号を車両情報出力端子T7から出力することが、ナビ制御部52に対して側方画像をモニタ51に表示させる制御となる。以下、この制御を側方視認支援制御という。
また、制御機構12は、側方視認支援制御を行っている最中に、スイッチSWがON状態とされたことを認識すると、側方視認支援制御を終了する。このため、後付用側方視認支援ユニット10では、当該ユニットによる側方視認支援制御の有無を切り換えるためにスイッチSWが設けられていることとなる。
さらに、上記したように、制御機構12は、スイッチSWがON状態とされたことを認識しても、車両Cの走行速度が所定の値以上である場合、取得している車速パルス信号およびリバース信号をそのまま車両情報出力端子T7から出力し、側方画像をモニタ51に表示させる側方視認支援制御は行わない。これは、運転手が側方画像の視認を要求する場面としては、すれ違いのために道路の左側に寄ったとき、狭い道路を走行しているとき、駐車すべく車両Cを後退させているとき等のように、車両Cの左側方の道路状況が緊迫しており、車両Cが低速で走行していることが考えられる。このことから、車速が所定の速度を超えている場合には、車両Cが通常走行をしていることから既存のナビゲーションシステム50の機能のための地図画像等の表示に戻した方が、利便性が良いことによる。
ついで、制御機構12は、車両情報入力端子T4からON状態のリバース信号を取得している場面において、スイッチSWがON状態とされたことを認識すると、側方視認支援制御を行う。
制御機構12は、ナビ制御部52に側方画像をモニタ51に表示させた場合、すなわち側方視認支援制御を開始した場合、当該側方視認支援制御を開始した時点から所定の時間が経過すると、画像データ出力端子T6から出力可能な状態とする画像データの入力先を、カメラ機構用入力端子T2から後方カメラ用入力端子T1に切り換えるとともに、ON状態の仮想リバース信号を出力することを停止し、側方視認支援制御を終了する。この終了とともに、制御機構12は、取得している車速パルス信号およびリバース信号をそのまま車両情報出力端子T7から出力する。これは、以下のことによる。上記したように、運転手が側方画像の視認を要求する場面としては、車両Cの左側方の道路状況が緊迫している場面であり、例えば、すれ違いのために道路の左側に寄ったとき、狭い道路を走行しているとき、駐車すべく車両Cを後退させているとき等を想定している。このような特殊な場面は、短時間であるとともに車両Cの操作に集中させることが好ましいことから、所定の時間の経過によりモニタ51の側方画像の表示を元の状態(地図画像等または後方画像)に戻したほうが、利便性が良いことによる。
制御機構12は、側方視認支援制御を行っている際、車両情報入力端子T4から取得しているリバース信号が切り変わるすなわちON状態であったリバース信号がOFF状態に変わるまたはOFF状態であったリバース信号がON状態に変わると、側方視認支援制御を終了する。
この制御機構12により側方視認支援制御が行われる工程を、図10に示すフローチャートに沿って説明する。なお、制御機構12では、車両Cの電装品が動作状態とされている間、図10のフローチャートを繰り返し行う。
制御機構12は、スイッチSWがON状態とされたか否か判断する(ステップS1)。ON状態とされていない場合、フローチャートを終了し、ON状態とされた場合には、ステップS2へ進む。
制御機構12は、車両情報入力端子T4から取得しているリバース信号がOFF状態であるかON状態であるかを判断する(ステップS2)。OFF状態の場合ステップS3へ進み、ON状態の場合ステップS10へ進む。
制御機構12は、車両情報入力端子T4から取得している車速パルスに基づいて、車両Cの走行速度が所定の速度未満であるか否かを判断する(ステップS3)。本実施例では、所定の速度は20km/hに設定されている。車速が20km/h未満である場合ステップS4へ進み、車速が20km/h以上である場合フローチャートを終了する。
制御機構12は、側方視認支援制御を開始する(ステップS4)。すなわち、制御機構12は、画像データ出力端子T6から出力可能な状態とする画像データの入力先を、後方カメラ用入力端子T1からカメラ機構用入力端子T2に切り換える。これに伴って、制御機構12は、ON状態の仮想リバース信号を車両情報出力端子T7から出力する。さらに、制御機構12は、この側方視認支援制御を開始した時点から、カウントを開始する。
側方視認支援制御を開始すると、制御機構12は、側方視認支援制御を開始した後にスイッチSWがON状態とされたか否か判断する(ステップS5)。ON状態とされていない場合にはステップS6へ進み、ON状態とされた場合には側方視認支援制御を終了すべくステップS9へ進む。このようにスイッチSWがON状態とされた場合に側方視認支援制御を終了するのは、側方視認支援制御が行われている最中にスイッチSWが押されたということは、乗員が側方画像ではなく他の画像(地図画像や後方画像等)をモニタ51に表示させたい、という意思の表れであることによる。
制御機構12は、側方視認支援制御を開始してから所定の時間が経過したか否かを判断する(ステップS6)。本実施例では、所定の時間は15秒に設定されている。15秒を経過した場合には側方視認支援制御を終了すべくステップS9へ進み、15秒を経過していない場合にはステップS7に進む。
制御機構12は、車両Cの走行速度が所定の速度以上であるか否か、すなわち車速が20km/h以上であるか否かを判断する(ステップS7)。車速が20km/h以上である場合には側方視認支援制御を終了すべくステップS9へ進み、車速が20km/h未満である場合にはステップS8へ進む。
制御機構12は、車両情報入力端子T4から取得しているOFF状態であったリバース信号が、ON状態となったか否かを判断する(ステップS8)。ON状態となった場合には側方視認支援制御を終了すべくステップS9へ進み、ON状態となっていない場合にはステップS5へ戻る。
制御機構12は、ステップS5ないしステップS8の何れかの判断に基づいて、側方視認支援制御を終了する(ステップS9)。すなわち、制御機構12は、画像データ出力端子T6から出力可能な状態とする画像データの入力先を、カメラ機構用入力端子T2から後方カメラ用入力端子T1に切り換えるとともに、ON状態の仮想リバース信号を車両情報出力端子T7から出力することを停止する。また、この停止とともに、制御機構12は、取得している車速パルス信号およびリバース信号をそのまま車両情報出力端子T7から出力する。これにより、フローチャートを終了する。
また、制御機構12は、ステップS2において、車両情報入力端子T4から取得しているリバース信号がON状態であると判断した場合、制御機構12は、側方視認支援制御を開始する(ステップS10)。
側方視認支援制御を開始すると、制御機構12は、側方視認支援制御を開始した後にスイッチSWがON状態とされたか否か判断する(ステップS11)。ON状態とされていない場合にはステップS12へ進み、ON状態とされた場合には側方視認支援制御を終了すべくステップS9へ進む。
制御機構12は、側方視認支援制御を開始してから所定の時間が経過したか否か、すなわち15秒経過したか否かを判断する(ステップS12)。15秒を経過した場合には側方視認支援制御を終了すべくステップS9へ進み、15秒を経過していない場合にはステップS13に進む。
制御機構12は、車両情報入力端子T4から取得しているON状態であったリバース信号が、OFF状態となったか否かを判断する(ステップS13)。OFF状態となった場合には側方視認支援制御を終了すべくステップS9へ進み、OFF状態となっていない場合にはステップS11へ戻る。
このように制御機構12が図10のフローチャートに示す動作をすることにより、後付用側方視認支援ユニット10と既存のナビゲーションシステム50と協働して構築される側方視認支援システムでは、スイッチSWに為される操作により、図11に示すように動作する。この図11は、側方視認支援システムと既存のナビゲーションシステム50との動作の切り換わりの様子をモニタ51の表示に基づいて説明するための説明図である。
モニタ51に、既存のナビゲーションシステム50の機能としての地図画像等が表示されている場面において、スイッチSWが押されると、車速が所定の速度(本実施例では20km/h未満)である場合、モニタ51の表示が地図画像等から側方画像へと切り換わる(矢印A1参照)。
また、モニタ51に、地図画像等が表示されている場面において、車両Cの変速ギア(図示せず)がリバース(バック)へと切り換えられる(リバース信号がOFF状態からON状態となる)と、モニタ51の表示が地図画像等から後方画像へと切り換わる(矢印A2参照)。
モニタ51に、既存のナビゲーションシステム50の機能としての後方画像が表示されている場面において、車両Cの変速ギア(図示せず)がリバース(バック)から他の位置へと切り換えられる(リバース信号がON状態からOFF状態となる)と、モニタ51の表示が後方画像から地図画像等へと切り換わる(矢印A3参照)。
また、モニタ51に、後方画像が表示されている場面において、スイッチSWが押されると、モニタ51の表示が後方画像から側方画像へと切り換わる(矢印A4参照)。
このように、モニタ51に、側方視認支援システムの機能としての側方画像が表示されている場面では、リバース信号がOFF状態の場合(矢印A1参照)と、リバース信号がON状態の場合(矢印A4参照)とがあることとなる。このようなリバース信号の差異、すなわち側方画像に切り換わる前のモニタ51の表示の差異により、側方視認支援システムの機能から既存のナビゲーションシステム50の機能へと移り変わる際の動作が異なることとなる。
リバース信号がOFF状態であり、モニタ51に後方画像が表示されている場面において、スイッチSWが押されると、モニタ51の表示が側方画像から地図画像等へと切り換わる(矢印A5参照)。この他に、リバース信号がOFF状態であり、モニタ51に後方画像が表示されている場面では、車速が20km/hを超えるか、モニタ51が側方画像に切り換わってから15秒を経過しても、モニタ51の表示が側方画像から地図画像等へと切り換わる(矢印A5参照)。
また、リバース信号がOFF状態であり、モニタ51に後方画像が表示されている場面において、車両Cの変速ギア(図示せず)がリバース(バック)へと切り換えられる(リバース信号がOFF状態からON状態となる)と、モニタ51の表示が側方画像から後方画像へと切り換わる(矢印A6参照)。
リバース信号がON状態であり、モニタ51に後方画像が表示されている場面において、車両Cの変速ギア(図示せず)がリバース(バック)から他の位置へと切り換えられる(リバース信号がON状態からOFF状態となる)と、モニタ51の表示が側方画像から地図画像等へと切り換わる(矢印A7参照)。
また、リバース信号がON状態であり、モニタ51に後方画像が表示されている場面において、スイッチSWが押されると、モニタ51の表示が側方画像から後方画像へと切り換わる(矢印A8参照)。この他に、リバース信号がOFF状態であり、モニタ51に後方画像が表示されている場面では、モニタ51が側方画像に切り換わってから15秒を経過すると、モニタ51の表示が側方画像から地図画像等へと切り換わる(矢印A8参照)。
このように、本発明に係る後付用側方視認支援ユニット10は、既存のナビゲーションシステム50の機能を活かしつつ、当該ナビゲーションシステム50と協働して側方視認支援システムを構築することができ、カメラ機構11からの側方画像をモニタ51に表示させることができる。
また、後付用側方視認支援ユニット10は、カメラ機構11をサイドミラーSMに容易に取り付けることができ、かつ制御機構12を既存のナビゲーションシステム50の伝達経路(電路)に割り込むように接続することで、そのナビ制御部52のプログラムの書き換えを行うことなく当該ナビゲーションシステム50と両立する側方視認支援システムを構築することができる。このことから、コストの増加を招くことなく容易に車両に適用することができる。
さらに、後付用側方視認支援ユニット10では、スイッチSWを押すだけで、モニタ51の表示を、側方画像から他の画像(既存のナビゲーションシステム50の機能としての画像)へと切り換える、および他の画像から側方画像へと切り換えることができる、利便性の良い側方視認支援システムを構築することができる。
後付用側方視認支援ユニット10では、所定の時間が経過すると、自動的に側方画像に切り換わる前のモニタ51の表示に戻るので、利便性の良い側方視認支援システムを構築することができる。これは、運転手が側方画像の視認を要求する場面としては、車両Cの左側方の道路状況が緊迫している場面であり、例えば、すれ違いのために道路の左側に寄ったとき、狭い道路を走行しているとき、駐車すべく車両Cを後退させているとき等が考えられる。このような特殊な場面では、自動的に側方画像に切り換わる前のモニタ51の表示に戻ることにより、運転手は車両Cの運転操作に集中することができることから、利便性がよくなる。また、必要であれば、再びスイッチSWを押せば、モニタ51の表示を側方画像に切り換えることができるので、自動的に元のモニタ51の表示に戻ることが、問題となることはない。
後付用側方視認支援ユニット10では、既存のナビゲーションシステム50において、各接続個所(上記した実施例では後方カメラ53および車両情報源54)からナビ制御部52へと接続されていた各接続経路(電路)に制御機構12を介在させるように当該制御機構12を接続すればよいことから、制御機構12の設置が容易である。これは、車両Cでは、一般に非常に多くの配線が設けられているが、ナビ制御部52へと接続されている配線(接続線)に制御機構12を割り込ませるように接続すればよいことから、多くの配線の中から制御機構12に接続する配線(接続線)を探し出す必要がなくなることによる。
後付用側方視認支援ユニット10では、ブラケット18を介して各締結部材で固着することにより、サイドミラーSMにカメラ機構11を取り付けることができるので、カメラ機構11の設置が容易である。
後付用側方視認支援ユニット10では、既存のナビゲーションシステム50のナビ制御部52の後方カメラ用入力端子T1に入力する画像データをカメラ機構11が取得した側方画像データに切り換えるとともに、ナビ制御部52の車両情報入力個所55にON状態の仮想リバース信号を入力することにより、モニタ51にカメラ機構11からの側方画像を表示させるものであることから、ナビ制御部52のプログラムを何ら変更することなく既存のナビゲーションシステム50に側方視認支援を行わせることができる。ここで、ナビ制御部52では、車両Cが通常走行している場面において、後付用側方視認支援ユニット10の制御機構12が側方視認支援制御を実行すべく当該制御機構12からON状態の仮想リバース信号が入力されると、既存のナビゲーションシステム50の道案内機能の中での自車両の現在位置を誤った位置と認識してしまう虞がある。これは、ナビ制御部52では、ON状態の仮想リバース信号が入力されている間は、車両Cが後退しているものと判断してしまうことによる。ところが、後付用側方視認支援ユニット10では、所定の速度(上記した実施例では20km/h)を超えた場合、および側方視認支援制御の実行時間が所定の時間(上記した実施例では15秒)を超えた場合は、側方視認支援制御を終了することから、道案内機能の中での自車両の現在位置と、車両Cが実在する位置との差異を軽微なものとすることができる。このため、ナビゲーションシステム50の道案内機能に支障が出ることを殆どなくすことができる。また、ナビゲーションシステム50(ナビ制御部52)では、道案内機能の中での自車両の現在位置の修正機能により、軽微な誤差の場合、道案内機能の中での自車両の現在位置が車両Cの実在する位置へと瞬時に修正されることから、乗員は、既存のナビゲーションシステム50の道案内機能と、後付用側方視認支援ユニット10による側方視認支援機能との切り換えにより、違和感を覚えることはない。なお、このことを勘案して、制御機構12では、側方視認支援制御を行っている間、ナビ制御部52へ向けて、ON状態の仮想リバース信号を出力するとともに、自らが取得している車速パルスに拘わらずOFF状態の仮想車速信号(零状態の車速パルス)を出力する構成としてもよい。この場合、ナビ制御部52は、制御機構12により側方視認支援制御が実行されている間は、車両Cが停車しているものと判断することとなるので、道案内機能の中での自車両の現在位置と、車両Cが実在する位置との差異をより軽微なものとすることができる。
後付用側方視認支援ユニット10が構築する側方視認支援システムでは、車速が所定の速度(上記した実施例では20km/h)を超えた場合、側方視認支援制御を終了することから、車両Cが通常走行をしている状態においてモニタ51に表示されている側方画像に運転手の注意が向くことを防止することができる。
したがって、本発明に係る後付用側方視認支援ユニット10では、既存のナビゲーションシステム50を利用して側方視認支援システムを構築することができ、かつコストの増加を招くことなく容易に車両Cに適用することができる。
なお、上記した実施例では、後付用側方視認支援ユニット10がナビゲーションシステム50と協働して構築する側方視認支援システムでは、スイッチSWに為された操作に応じて、画像データ出力端子T6から出力可能な状態とする画像データの入力先を、後方カメラ用入力端子T1からカメラ機構用入力端子T2に切り換える構成、すなわち、車両周辺の画像としては側方画像と後方画像とをモニタ51に表示させる構成とされていたが、上記した実施例に限定されるものではない。例えば、側方画像と後方画像とに、前方の広角画像を加えて、それらの中から適宜選択された画像をモニタ51に表示させる構成とすることができる。この場合、図12に示すように、制御機構12´を用いればよい。この制御機構12´では、制御機構12の構成に加えて、前方広角カメラ用入力端子T8と、第2スイッチ接続端子T9とが設けられている。この制御機構12´では、例えば、スイッチ接続端子T3からの入力がON状態となった場合にカメラ機構用入力端子T2からの画像データを画像データ出力端子T6から出力可能な状態とし、第2スイッチ接続端子T9からの入力がON状態となった場合に前方広角カメラ用入力端子T8からの画像データを画像データ出力端子T6から出力可能な状態とすることにより、車両周辺の画像として側方画像と後方画像と前方の広角画像とを適宜モニタ51に表示させる構成とすることができる。
また、上記した例では、車両Cの周辺を撮像する撮像手段として後方カメラ53が設けられ、ナビ制御部52にON状態のリバース信号が入力されるとモニタ51に後方カメラ53による後方画像を表示させる構成のナビゲーションシステム50が搭載された車両Cに適用する例を示していたことから、車両情報源54としてリバース信号線が用いられていたが、次に示す構成であればよく、上記した例に限定されるものではない。後付用側方視認支援ユニット10の制御機構12は、カメラ機構11からの側方画像をナビゲーションシステムのナビ制御部に出力する際、当該ナビ制御部が表示手段(モニタ)の表示を、地図画像等から自らに入力された画像に切り換える判断のための信号と同等の仮想の信号を生成し、この仮想信号をナビ制御部に出力するものであればよい。
さらに、上記した例では、ナビゲーションシステム50は、モニタ51とナビ制御部52とが別体とされていたが、同一のケースに収容されて構成されていてもよく、上記した例に限定されるものではない。
上記した例では、後付用側方視認支援ユニット10のカメラ機構11は、車両Cの進行方向で見て左側のサイドミラーSMに取り付けられていたが、右側のサイドミラーに取り付けても、両サイドミラーにそれぞれ取り付けてもよく、上記した例に限定されるものではない。