JP4802332B2 - 磁気吸引型非接触搬送装置 - Google Patents
磁気吸引型非接触搬送装置 Download PDFInfo
- Publication number
- JP4802332B2 JP4802332B2 JP2006547756A JP2006547756A JP4802332B2 JP 4802332 B2 JP4802332 B2 JP 4802332B2 JP 2006547756 A JP2006547756 A JP 2006547756A JP 2006547756 A JP2006547756 A JP 2006547756A JP 4802332 B2 JP4802332 B2 JP 4802332B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- type non
- magnetic attraction
- magnetic pole
- core
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/04—Magnetic suspension or levitation for vehicles
- B60L13/06—Means to sense or control vehicle position or attitude with respect to railway
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N15/00—Holding or levitation devices using magnetic attraction or repulsion, not otherwise provided for
- H02N15/02—Holding or levitation devices using magnetic attraction or repulsion, not otherwise provided for by Foucault currents
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Manipulator (AREA)
- Non-Mechanical Conveyors (AREA)
Description
本発明は、電磁石を用いて物体を吸引し、浮上させて搬送又は回転させる磁気吸引型非接触搬送装置に関する。
近年、磁気浮上技術を応用したものとして、モータの磁気軸受、磁気浮上式鉄道、非接触型搬送装置等が注目され、実用化されている。中でも、例えば、日本国特開平6−46592号公報や特開平7−123528号公報にそれぞれ記載されているような停止保持装置や磁気浮上搬送装置は、搬送物を非接触状態で保持するため、機械的なマニピュレータと異なり摩擦による摩耗や、潤滑の問題がなくなるという利点がある。これは真空中やクリーンルーム内で対象物を、メンテナンスフリーで処理するのに適している。
しかしながら、前記特許公報記載の技術あるいはその他の文献に記載されている技術においては、対象物の位置を直接検知するセンサーが、対象物の下方又は側方に設けられている。この理由は、上部に磁石を備えこの磁石によって対象物を吸引する方式の磁気浮上装置においては、上部に対象物の位置を検知するセンサーがあると磁石の邪魔になり、センサーによっては磁気の影響を受けることがあるからと考えられるが、磁石とセンサーを別々に配置すると、配線等が複雑化して装置が大型化するという問題がある。また、対象物の移動範囲が広いと、多数のセンサーを必要とする。
本発明はかかる事情に鑑みてなされたもので、センサー(変位計)と磁石を一体化して装置をコンパクト化し、例えば、対象物を遠方まで移送する場合であっても、多数のセンサーを必要としない磁気吸引型非接触搬送装置を提供することを目的とする。
前記目的に沿う本発明に係る磁気吸引型非接触搬送装置は、コイルが巻かれて先部に磁極を形成する磁性体と、前記磁性体に組み込まれ前記磁極によって吸引される対象物の変位を測定する変位計と、該変位計の出力を入力とし前記コイルに流れる電流を制御して、前記対象物の位置を制御する制御装置とを備えた磁気吸着素子を有し、
前記磁性体はそれぞれ下端に中央磁極と環状磁極を備え上部で連結された中央の磁極鉄心部とその外側の筒状鉄心部を有し、前記磁極鉄心部を中心に断面円形に形成され、
前記変位計は、中央の棒状部と、該棒状部の周囲に配置された筒状部と、前記棒状部と前記筒状部との上端を連結するヨーク部を有するセンサー用コアと、前記棒状部に巻回されたコイルとを備えた渦電流センサーからなって、前記磁極鉄心部の中央に形成された円柱状空洞部に、該磁極鉄心部とは隙間を有して埋設され、前記磁極の直下にある前記対象物の変位を直接検知する。
この吸引状態の対象物の位置を変位計で測定し、コイルを流れる電流を制御し、磁極(磁石)による吸引力と対象物の重量をバランスさせて対象物の位置を制御する。なお、磁極による吸引力は磁極からの距離の二乗に反比例し、重力は対象物の変位によっては変化しないので、磁極から対象物までの距離は容易に制御できる。
このように、本発明に係る磁気吸引型非接触搬送装置は、変位計が磁性体に組み込まれているので、全体をコンパクトにすることができる。そして、このような磁気吸着素子を複数組み合わせることによって、複雑な形状の対象物であっても、その搬送や位置制御、場合によって回転制御も行なうことができる。
前記磁性体はそれぞれ下端に中央磁極と環状磁極を備え上部で連結された中央の磁極鉄心部とその外側の筒状鉄心部を有し、前記磁極鉄心部を中心に断面円形に形成され、
前記変位計は、中央の棒状部と、該棒状部の周囲に配置された筒状部と、前記棒状部と前記筒状部との上端を連結するヨーク部を有するセンサー用コアと、前記棒状部に巻回されたコイルとを備えた渦電流センサーからなって、前記磁極鉄心部の中央に形成された円柱状空洞部に、該磁極鉄心部とは隙間を有して埋設され、前記磁極の直下にある前記対象物の変位を直接検知する。
この吸引状態の対象物の位置を変位計で測定し、コイルを流れる電流を制御し、磁極(磁石)による吸引力と対象物の重量をバランスさせて対象物の位置を制御する。なお、磁極による吸引力は磁極からの距離の二乗に反比例し、重力は対象物の変位によっては変化しないので、磁極から対象物までの距離は容易に制御できる。
このように、本発明に係る磁気吸引型非接触搬送装置は、変位計が磁性体に組み込まれているので、全体をコンパクトにすることができる。そして、このような磁気吸着素子を複数組み合わせることによって、複雑な形状の対象物であっても、その搬送や位置制御、場合によって回転制御も行なうことができる。
本発明に係る磁気吸引型非接触搬送装置において、前記変位計は前記磁性体の内部(中央部)に形成され、少なくともその下部が開放した円柱状空洞部に一体的に組み込まれ、前記磁極の直下にある前記対象物の変位を直接検知する。
そして、前記変位計は前記磁性体とは隙間を有して配置されている。更には、前記変位計は、該変位計を囲み、該変位計と隙間を有して又は密着して高透磁率のケースに収納されて、前記円柱状空洞部に配置することもできる。これらによって、変位計がコイルに電流を流すことによる磁場の影響を受け難くなり、より正確な変位の測定ができる。
本発明に係る磁気吸引型非接触搬送装置において、前記磁性体の内側又は外側に永久磁石を組み込むこともできる。この場合、コイルによって磁性体に発生する磁極の方向と永久磁石の磁極の方向を合わせておくと、コイルに流す電流を減らすことができ、省電力化を図ることができる。なお、この場合、永久磁石は、対象物を吸着保持できる磁力より小さくしておくのがよい。これによって、コイルを通電することによって発生する磁力と永久磁石の磁力とが合算して対象物に加わることになる。
本発明に係る磁気吸引型非接触搬送装置において、前記磁性体の内又は外には、前記対象物に回転トルクを与える補助コイルを設けることもできる。これによって対象物に回転トルクを与えることができ、対象物の位置及び速度等の回転制御を行うことができる。ここで、この対象物を磁性物からなる球体又はその他の軸対象物体とした場合には、対象物を磁気で宙づりした状態で回転させることができる。更に、この対象物を球体とした場合には、その表面に模様を記載して、例えば地球儀等の飾り物とすることができる。
そして、本発明に係る磁気吸引型非接触搬送装置において、前記磁気吸着素子をロボットハンドのアームの先部に設けることもできる。これによって、ロボットハンドのアームを用いて対象物を任意の場所に移動させることができる他、複数のロボットハンドを用いることによって対象物の角度や姿勢も自由に制御できる。
また、本発明の磁気吸引型非接触搬送装置において、複数の前記磁気吸着素子が共通の架台に設けられ、前記磁気吸着素子の中間には、前記対象物の上側に設けられた磁石とは同極の磁極を有ししかもその磁極が下方に向いた吸着防止用磁石を設けることも可能である。これによって、対象物が下からの荷重や衝撃を受けた場合に、吸着防止用磁石が対象物に設けられている磁極と反発し、対象物が磁気吸着素子に吸着されて衝突するのを防止できる。
続いて、添付した図面を参照しつつ、本発明を具体化した実施例につき説明し、本発明の理解に供する。
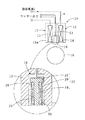
図1に示すように、本発明の第1の実施例に係る磁気吸引型非接触搬送装置は、磁気吸着素子10を備えている。磁気吸着素子10は、内側に環状の空洞部11が形成された磁性体の一例である鉄心12と、鉄心12中央の磁極鉄心部13を取り囲む空洞部11に設けられたコイル14と、磁極鉄心部13の中央部に埋め込まれた変位計の一例である渦電流センサー15とを有している。以下、これらについて詳しく説明する。なお、渦電流センサー15は、磁極鉄心部13の軸心に対して偏心して配置することもできる。
図1に示すように、本発明の第1の実施例に係る磁気吸引型非接触搬送装置は、磁気吸着素子10を備えている。磁気吸着素子10は、内側に環状の空洞部11が形成された磁性体の一例である鉄心12と、鉄心12中央の磁極鉄心部13を取り囲む空洞部11に設けられたコイル14と、磁極鉄心部13の中央部に埋め込まれた変位計の一例である渦電流センサー15とを有している。以下、これらについて詳しく説明する。なお、渦電流センサー15は、磁極鉄心部13の軸心に対して偏心して配置することもできる。
鉄心12は、飽和磁束密度の高い鉄材料で形成され、この実施例では中央の磁極鉄心部13を中心として断面円形に形成されている。コイル14には直流を流すので、鉄心12内には渦電流は流れることは殆どなく、必ずしも積層鉄心でなくてもよい。また、この実施例においては、鉄心12は断面円形としているが、E字形鉄心片を積み重ねて構成してもよい。
コイル14は、対象物16の変位の変動性に対する応答性を高めるために、太い導体を用い、低インピーダンスとするのがよく、例えば、その時定数を1/2000〜1/100秒とするのが好ましい。このコイル14と鉄心12によって電磁石17が形成されている。コイル14に通電すると、磁極鉄心部13の下端及びその外側の筒状鉄心部13aの下端に磁極(中央磁極と環状磁極)が形成される。
コイル14は、対象物16の変位の変動性に対する応答性を高めるために、太い導体を用い、低インピーダンスとするのがよく、例えば、その時定数を1/2000〜1/100秒とするのが好ましい。このコイル14と鉄心12によって電磁石17が形成されている。コイル14に通電すると、磁極鉄心部13の下端及びその外側の筒状鉄心部13aの下端に磁極(中央磁極と環状磁極)が形成される。
渦電流センサー15は、図1の部分拡大図に示すように、中央に棒状部19を、その周囲に筒状部20を、上部に棒状部19と筒状部20の上端を連結するヨーク部21を有するセンサー用コア22と、棒状部19に巻回されたコイル23とを有し、このコイル23に図2に示すコントローラ24から高周波電流を流し、対象物16の変位によって変化するコイル23のインピーダンスを測定し、これを距離に換算する構造となっている。このセンサー用コア22はこの実施例では、高周波特性の良いフェライトコア等の焼結コアを使用しているが、コイル23に流す高周波(例えば、10〜200kHz)に対して損失や発熱を起こしにくい材料であれば、他の磁性材料を使用することもできる。
センサー用コア22は、磁極鉄心部13の先側の下部が開放した円柱状空洞部25に埋設されているが、周囲の磁極鉄心部13とは隙間を有して配置され、この隙間部分には樹脂26が充填されている。中央の棒状部19の下端及び周囲の筒状部20の下端の位置は、磁極鉄心部13の下端と一致し、センサー用コア22が磁極鉄心部13の下端、即ち、磁極から露出している。この実施例ではセンサー用コア22の下端は磁極から物理的に露出しているが、表面に樹脂等を塗布する場合も、センサー用コア22が、磁極鉄心部13の磁極の下端から磁気的に露出していることになり、本発明の権利範囲に含まれる。
また、この実施例においては、円柱状空洞部25は磁極鉄心部13の下部にのみ形成しているが、図1に破線eで示すように、磁極鉄心部13を上下に貫通することもでき、これによって、鉄心加工が容易となると共に、渦電流センサー15が磁場の影響を受けにくくなるという利点がある。また、渦電流センサー15の周囲に透磁率の高い材料で形成されたケースを設けることもでき、この場合、このケースを渦電流センサー15に密着させて、又は隙間を有して配置することができ、周囲からの磁束がこのケースを通過し、渦電流センサー15への磁場の影響が更に小さくなる。なお、このケースは円柱状空洞部25に配置されている。
図2には、この磁気吸引型非接触搬送装置に用いる磁気吸着素子10の制御装置28を示すが、電磁石17に設けられた渦電流センサー15のコイル23に接続される前記コントーローラ24を有し、コントローラ24からのアナログ信号(即ち、対象物16の変位信号)をA/Dコンバータ29で変換してコンピュータ(計算機)30にその信号を送っている。一方、コンピュータ30では、対象物16の設定変位(基準高さh)と対象物16の変位信号とから、PD制御又はPID制御を行って、デジタル出力を発生し、これをD/Aコンバータ31でアナログ信号に変換してパワーアンプ32で増幅し、電磁石17のコイル14に通電している。
なお、図3に、この電磁石17の中央磁極(磁極鉄心部13)の先端から例えば直下1mmの位置での吸引力(N)と励磁電流(A)との関係を示すが、励磁電流に吸引力は比例する。また、図4には、同一電磁石17を用いて励磁電流を0.06Aとした場合の、電磁石17の中央磁極の先端と対象物16とのギャップ(mm:隙間)と吸引力(N)との
関係を示したもので、吸引力は、(ギャップ長+定数)の自乗に反比例して小さくなる。
従って、前記したギャップは渦電流センサー15で測定されるので、磁性物体からなる対象物16(又は磁気吸着素子10)の高さ位置に外乱が発生し急に対象物16が相対的に上昇又は下降した(変位x)場合、これに比例させて電磁石17の電流を増加させても吸引力が追いつかないので、比例要素Pに、変位xの微分要素Dを加えて制御するのがよい。更に、微分要素Dを加えるだけでは外乱に対して敏感に応答するので、変位xの積分要素Iも考慮して制御するPID制御を行うのがよく、これによって、対象物16の変位xを一定の範囲に落ち着かせることができる。なお、この制御系の係数を決定するには、周知の最適レギュレータ理論を適用するのがよい。
関係を示したもので、吸引力は、(ギャップ長+定数)の自乗に反比例して小さくなる。
従って、前記したギャップは渦電流センサー15で測定されるので、磁性物体からなる対象物16(又は磁気吸着素子10)の高さ位置に外乱が発生し急に対象物16が相対的に上昇又は下降した(変位x)場合、これに比例させて電磁石17の電流を増加させても吸引力が追いつかないので、比例要素Pに、変位xの微分要素Dを加えて制御するのがよい。更に、微分要素Dを加えるだけでは外乱に対して敏感に応答するので、変位xの積分要素Iも考慮して制御するPID制御を行うのがよく、これによって、対象物16の変位xを一定の範囲に落ち着かせることができる。なお、この制御系の係数を決定するには、周知の最適レギュレータ理論を適用するのがよい。
対象物16の変位を変える場合には、コンピュータ30の予め決められている変位x(ギャップ)の基準値を変更することになる。この基準値を変えると、その差分に応じて対象物16が上昇又は下降し、再設定された所定の変位で保持される(図5参照)。この状態で、磁気吸着素子10が取付けられた磁気吸引型非接触搬送装置を例えば水平移動させると、対象物16と電磁石17の中央磁極の距離が一瞬長くなろうとするので、電磁石17の力で制御され対象物16の重力とバランスしながら水平移動することになる。なお、磁気吸引型非接触搬送装置を制御系が応答できる速度範囲で、磁気吸引型非接触搬送装置が上昇、下降、又は斜め移動する場合も、対象物16は電磁石17に吸引されながら移動する。また、対象物16と電磁石17の中央磁極の距離は、電磁石17の磁力及び対象物16の重量に対応して必然的に最小値と最大値を有する制御可能変位領域が存在する。
例えば、対象物16をテーブルの上に載置する場合には、テーブルの上に載る対象物16が前記した制御可能変位領域にあることを確認した後、徐々に対象物16の変位を下げることによって行う。また、テーブルの上にある対象物16をつり上げる場合には、逆の操作をすることになる。
例えば、対象物16をテーブルの上に載置する場合には、テーブルの上に載る対象物16が前記した制御可能変位領域にあることを確認した後、徐々に対象物16の変位を下げることによって行う。また、テーブルの上にある対象物16をつり上げる場合には、逆の操作をすることになる。
続いて、図6(A)、(B)を参照しながら、本発明の第2の実施例に係る磁気吸引型非接触搬送装置の磁気吸着素子35について説明するが、第1の実施例に使用した磁気吸着素子10と同一の構成要素は同一の符号を用いてその詳しい説明を省略する。
図6に示すように、磁気吸着素子35は、鉄心12の周囲に環状の永久磁石36が設けられている。この永久磁石36の下端の磁極は、鉄心12の外側筒37の下端の磁極と同一となって、丁度、電磁石17の磁気を増加する方向に永久磁石36が配置されている。なお、電磁石17の励磁電流を0とした場合、この永久磁石36の強さだけでは、対象物16を引き上げることができない強さの永久磁石36を使用している。これによって、対象物16をつり上げる場合には、この永久磁石36からの磁束が電磁石17の磁束に加わり、励磁電流を減らすことができる。
なお、この永久磁石の配置位置は、永久磁石の磁束が電磁石17の磁束に重畳できるような位置であれば、鉄心12の内部や途中位置であってもよい。
図6に示すように、磁気吸着素子35は、鉄心12の周囲に環状の永久磁石36が設けられている。この永久磁石36の下端の磁極は、鉄心12の外側筒37の下端の磁極と同一となって、丁度、電磁石17の磁気を増加する方向に永久磁石36が配置されている。なお、電磁石17の励磁電流を0とした場合、この永久磁石36の強さだけでは、対象物16を引き上げることができない強さの永久磁石36を使用している。これによって、対象物16をつり上げる場合には、この永久磁石36からの磁束が電磁石17の磁束に加わり、励磁電流を減らすことができる。
なお、この永久磁石の配置位置は、永久磁石の磁束が電磁石17の磁束に重畳できるような位置であれば、鉄心12の内部や途中位置であってもよい。
また、電磁石17の外側(内側でもよい)に、回転磁界を発生させる補助コイル38を設けることもできる。この補助コイル38の構造は誘導モータのステータの構造と同一であって、例えば、インバータ等によって周波数を制御された交流を流すと、これに応じて対象物に回転トルクが加わる。対象物が例えば、球体である場合には、これに回転を与えることができる。この場合、回転体(球体)の回転軸心が決まらない場合には、回転体の上部のみを磁性体とするか、又は回転体の上部に電磁石17の中央磁極に吸着される永久磁石を配置しておいてもよい。
なお、この磁気吸着素子35には支持ケース12aを介して雄ねじ39が設けられて、磁気吸引型非接触搬送装置の取付けフレーム(例えば、磁気吸引型非接触搬送装置の一例であるロボットハンドのアームの先端)に固定できる構造となっている。
なお、この磁気吸着素子35には支持ケース12aを介して雄ねじ39が設けられて、磁気吸引型非接触搬送装置の取付けフレーム(例えば、磁気吸引型非接触搬送装置の一例であるロボットハンドのアームの先端)に固定できる構造となっている。
続いて、図7を参照しながら、本発明の第3の実施例に係る磁気吸引型非接触搬送装置40について説明する。
図7に示すように、この実施例に係る磁気吸引型非接触搬送装置40は、搬送架台41と、その下部の4隅に設けられている磁気吸着素子42とを有している。この磁気吸着素子42の構造は、先に説明した磁気吸着素子10、35と実質同一である。従って、それぞれの磁気吸着素子42について独立に制御装置を有している。
なお、搬送対象物43には、磁気吸着素子42に対応する位置に磁着物の一例である鉄柱44〜47が設けられている。この鉄柱44〜47の表面は同一高さにあって、それぞれ滑らかな平面を形成している。
図7に示すように、この実施例に係る磁気吸引型非接触搬送装置40は、搬送架台41と、その下部の4隅に設けられている磁気吸着素子42とを有している。この磁気吸着素子42の構造は、先に説明した磁気吸着素子10、35と実質同一である。従って、それぞれの磁気吸着素子42について独立に制御装置を有している。
なお、搬送対象物43には、磁気吸着素子42に対応する位置に磁着物の一例である鉄柱44〜47が設けられている。この鉄柱44〜47の表面は同一高さにあって、それぞれ滑らかな平面を形成している。
また、この磁気吸引型非接触搬送装置40においては、隣り合う磁気吸着素子42の中間部には磁極が下方に向いた吸着防止磁石50〜53が設けられている。一方、搬送対象物43の上側には、この吸着防止磁石50〜53に対応する位置に、永久磁石54〜57が設けられている。永久磁石54〜57と、対応する吸着防止磁石50〜53の極性は同極となってお互いが反発するようになっている。吸着防止磁石50〜53は永久磁石であるのが好ましいが、電磁石であってもよい。なお、吸着防止磁石50〜53と永久磁石54〜57のそれぞれの露出する磁極は全部同一の磁極(例えば、N極)とするのがよい。
吸着防止磁石50〜53の先端は、磁気吸着素子42の先端より距離Lだけ突出しているのが好ましい。これによって、搬送対象物43が急上昇した場合であっても、吸着防止磁石50〜53が永久磁石54〜57と反発するので、鉄柱44〜47が磁気吸着素子42に衝突吸着することはない。なお、吸着防止磁石50〜53と永久磁石54〜57との反発力が大きすぎると、磁気吸着素子42によって鉄柱44〜47(即ち、搬送対象物43)が吸着されないので、吸着防止磁石50〜53が永久磁石54〜57に当接する又は近接する位置(例えば0〜4mm)では反発力が強く、それを超える位置では、磁気吸着素子42と鉄柱44〜47との吸着力の方が強くなるように、距離L及びその磁石の強さを調整するのがよい。なお、吸着防止磁石50〜53を電磁石として、それぞれ渦電流センサー15で鉄柱44〜47までの距離を測定し、吸着防止磁石50〜53の電流を制御してもよい。
吸着防止磁石50〜53の先端は、磁気吸着素子42の先端より距離Lだけ突出しているのが好ましい。これによって、搬送対象物43が急上昇した場合であっても、吸着防止磁石50〜53が永久磁石54〜57と反発するので、鉄柱44〜47が磁気吸着素子42に衝突吸着することはない。なお、吸着防止磁石50〜53と永久磁石54〜57との反発力が大きすぎると、磁気吸着素子42によって鉄柱44〜47(即ち、搬送対象物43)が吸着されないので、吸着防止磁石50〜53が永久磁石54〜57に当接する又は近接する位置(例えば0〜4mm)では反発力が強く、それを超える位置では、磁気吸着素子42と鉄柱44〜47との吸着力の方が強くなるように、距離L及びその磁石の強さを調整するのがよい。なお、吸着防止磁石50〜53を電磁石として、それぞれ渦電流センサー15で鉄柱44〜47までの距離を測定し、吸着防止磁石50〜53の電流を制御してもよい。
この実施例に係る磁気吸引型非接触搬送装置40において、吸着防止磁石50〜53及び永久磁石54〜57を省略し、各磁気吸着素子42に鉄柱44〜47を吸引させ、渦電流センサー15によって各鉄柱44〜47の変位を適正に保って、搬送対象物43をつり上げることもできる。この場合、磁気吸引型非接触搬送装置40の移動に沿って、搬送対象物43も移動することになる。この場合、鉄柱44〜47の一部又は全部に永久磁石を使用することもでき、これによって、磁気吸着素子42を流れる電流を減らすことができる。
なお、搬送対象物43は、この実施例においては、特別に作られたキャリッジからなって、内部に、例えば、放射性物質、半導体又はその装置、その他の化学物質等が配置されている。
また、前記実施例においては、磁気吸着素子が1つ又は4つの場合で説明したが、その他の個数の磁気吸着素子を用いる場合も本発明は適用される。
そして、本発明においては、発明の理解を容易にするため、具体的数字を用いて説明したが、本発明はこれらの数字には限定されるものではない。
なお、搬送対象物43は、この実施例においては、特別に作られたキャリッジからなって、内部に、例えば、放射性物質、半導体又はその装置、その他の化学物質等が配置されている。
また、前記実施例においては、磁気吸着素子が1つ又は4つの場合で説明したが、その他の個数の磁気吸着素子を用いる場合も本発明は適用される。
そして、本発明においては、発明の理解を容易にするため、具体的数字を用いて説明したが、本発明はこれらの数字には限定されるものではない。
本発明に係る磁気吸引型非接触搬送装置は、対象物の変位を測定する変位計が磁性体内に組み込まれているので、装置全体をコンパクトに構成できる。従って、本発明に係る磁気吸引型非接触搬送装置を用いて、宙づり状態の対象物(例えば、地球や月模型)を有する装飾物を提供できるだけでなく、タンクやチャンバー等内に収納された対象物を外部から位置制御や移動制御をすることができ、半導体の製造装置、化学や生物に関する実験装置、宇宙開発の分野で利用可能である。
Claims (6)
- コイルが巻かれて先部に磁極を形成する磁性体と、前記磁性体に組み込まれ前記磁極によって吸引される対象物の変位を測定する変位計と、該変位計の出力を入力とし前記コイルに流れる電流を制御して、前記対象物の位置を制御する制御装置とを備えた磁気吸着素子を有し、
前記磁性体はそれぞれ下端に中央磁極と環状磁極を備え上部で連結された中央の磁極鉄心部とその外側の筒状鉄心部を有し、前記磁極鉄心部を中心に断面円形に形成され、
前記変位計は、中央の棒状部と、該棒状部の周囲に配置された筒状部と、前記棒状部と前記筒状部との上端を連結するヨーク部を有するセンサー用コアと、前記棒状部に巻回されたコイルとを備えた渦電流センサーからなって、前記磁極鉄心部の中央に形成された円柱状空洞部に、該磁極鉄心部とは隙間を有して埋設され、前記磁極の直下にある前記対象物の変位を直接検知することを特徴とする磁気吸引型非接触搬送装置。 - 請求項1記載の磁気吸引型非接触搬送装置において、前記変位計は高透磁率のケースに収納されて、前記円柱状空洞部に配置されていることを特徴とする磁気吸引型非接触搬送装置。
- 請求項1又は2記載の磁気吸引型非接触搬送装置において、前記磁性体には外側に永久磁石が組み込まれていることを特徴とする磁気吸引型非接触搬送装置。
- 請求項1〜3のいずれか1項に記載の磁気吸引型非接触搬送装置において、前記磁性体の内又は外には、前記対象物に回転トルクを与える補助コイルが設けられていることを特徴とする磁気吸引型非接触搬送装置。
- 請求項1〜4のいずれか1項に記載の磁気吸引型非接触搬送装置において、前記磁気吸着素子は、ロボットハンドのアームの先部に設けられていることを特徴とする磁気吸引型非接触搬送装置。
- 請求項1〜5のいずれか1項に記載の磁気吸引型非接触搬送装置において、複数の前記磁気吸着素子が共通の架台に設けられ、前記磁気吸着素子の中間には、前記対象物の上側に設けられた磁石とは同極の磁極を有ししかもその磁極が下方に向いた吸着防止用磁石が設けられていることを特徴とする磁気吸引型非接触搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006547756A JP4802332B2 (ja) | 2004-11-30 | 2005-11-18 | 磁気吸引型非接触搬送装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004346842 | 2004-11-30 | ||
| JP2004346842 | 2004-11-30 | ||
| PCT/JP2005/021273 WO2006059505A1 (ja) | 2004-11-30 | 2005-11-18 | 磁気吸引型非接触搬送装置 |
| JP2006547756A JP4802332B2 (ja) | 2004-11-30 | 2005-11-18 | 磁気吸引型非接触搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2006059505A1 JPWO2006059505A1 (ja) | 2008-06-05 |
| JP4802332B2 true JP4802332B2 (ja) | 2011-10-26 |
Family
ID=36564940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006547756A Active JP4802332B2 (ja) | 2004-11-30 | 2005-11-18 | 磁気吸引型非接触搬送装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4802332B2 (ja) |
| WO (1) | WO2006059505A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104129650B (zh) * | 2014-07-18 | 2017-04-19 | 华南理工大学 | 一种定位传送投放装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02262802A (ja) * | 1989-03-31 | 1990-10-25 | Toshiba Corp | 浮上式搬送装置 |
| JPH04236172A (ja) * | 1991-01-18 | 1992-08-25 | Masafumi Yano | 静電力または磁力を利用した空間保持装置 |
| JPH04260534A (ja) * | 1991-02-18 | 1992-09-16 | Ebara Corp | 超電導式つり上げ装置 |
| JPH06179524A (ja) * | 1992-07-18 | 1994-06-28 | Ebara Corp | 磁気浮上真空搬送装置 |
| JP2001295842A (ja) * | 2000-04-14 | 2001-10-26 | Mitsubishi Electric Corp | 磁気軸受装置 |
| JP2002140116A (ja) * | 2000-11-01 | 2002-05-17 | Toshin Denki Kk | 塗装システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04286303A (ja) * | 1991-03-15 | 1992-10-12 | Kanetetsuku Kk | 磁気浮上装置 |
| JP3205623B2 (ja) * | 1992-12-25 | 2001-09-04 | 株式会社荏原製作所 | 磁気浮上搬送装置 |
| JP3456307B2 (ja) * | 1995-06-30 | 2003-10-14 | 株式会社ニコン | 磁気浮上型ステージ |
-
2005
- 2005-11-18 JP JP2006547756A patent/JP4802332B2/ja active Active
- 2005-11-18 WO PCT/JP2005/021273 patent/WO2006059505A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02262802A (ja) * | 1989-03-31 | 1990-10-25 | Toshiba Corp | 浮上式搬送装置 |
| JPH04236172A (ja) * | 1991-01-18 | 1992-08-25 | Masafumi Yano | 静電力または磁力を利用した空間保持装置 |
| JPH04260534A (ja) * | 1991-02-18 | 1992-09-16 | Ebara Corp | 超電導式つり上げ装置 |
| JPH06179524A (ja) * | 1992-07-18 | 1994-06-28 | Ebara Corp | 磁気浮上真空搬送装置 |
| JP2001295842A (ja) * | 2000-04-14 | 2001-10-26 | Mitsubishi Electric Corp | 磁気軸受装置 |
| JP2002140116A (ja) * | 2000-11-01 | 2002-05-17 | Toshin Denki Kk | 塗装システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2006059505A1 (ja) | 2008-06-05 |
| WO2006059505A1 (ja) | 2006-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4543181B2 (ja) | 超電導磁気浮上による非接触搬送装置 | |
| US7859157B2 (en) | Magnetic levitation system | |
| US8169114B2 (en) | Large gap horizontal field magnetic levitator | |
| CN202309577U (zh) | 磁悬浮旋转装置 | |
| US4983869A (en) | Magnetic bearing | |
| US8836190B2 (en) | Magnetic bearing, a rotary stage, and a reflective electron beam lithography apparatus | |
| CN106877745B (zh) | 多层共励磁斥型磁悬浮系统 | |
| JP4802332B2 (ja) | 磁気吸引型非接触搬送装置 | |
| CN1822487A (zh) | 磁斥型悬浮装置 | |
| JP5670231B2 (ja) | 磁気浮上制御装置 | |
| JP2547405B2 (ja) | 磁気浮上搬送装置 | |
| Takase et al. | Basic study on magnetic levitation system using superconducting coil | |
| CN210157102U (zh) | 一种磁悬浮装置 | |
| JP4972744B2 (ja) | 三次元磁気浮上装置、および永久磁石の三次元浮上方法 | |
| US20110025153A1 (en) | optimised levitation device | |
| TWM473861U (zh) | 磁懸浮旋轉裝置 | |
| KR100878619B1 (ko) | 전자석을 이용한 공중 부양 회전 장치 및 그 회전 방법 | |
| JPWO2005039019A1 (ja) | アクチュエータ | |
| JP4980683B2 (ja) | 吊上げ電磁石装置 | |
| Kube et al. | Electromagnetic miniactuators using thin magnetic layers | |
| JP3864227B2 (ja) | 反発形磁気浮上ユニット及びこのユニットを用いた搬送システム | |
| JP2022139397A (ja) | 浮上体の浮上高さ制御装置 | |
| CN110855186A (zh) | 一种基于力失衡驱动的单维度悬浮运动方法与装置 | |
| Iida et al. | Realization of diamagnetic levitation of column-shaped graphite | |
| JP2011158944A (ja) | 搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110712 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |