JP4711050B2 - 電動ブレーキシステム - Google Patents
電動ブレーキシステム Download PDFInfo
- Publication number
- JP4711050B2 JP4711050B2 JP2005102251A JP2005102251A JP4711050B2 JP 4711050 B2 JP4711050 B2 JP 4711050B2 JP 2005102251 A JP2005102251 A JP 2005102251A JP 2005102251 A JP2005102251 A JP 2005102251A JP 4711050 B2 JP4711050 B2 JP 4711050B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- angle
- motor
- rotation
- phase coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Braking Arrangements (AREA)
Description
そして、近時、電動モータとしては、効率面の向上などの点からブラシレス同期モータ等の適用が考えられている。
ブラシレス同期モータでは、回転子の回転をレゾルバなどの回転位置検出器により検出し、回転子位置に応じた界磁が固定子に発生するように制御する。効率よくモータを回転させるためには、理想的な界磁を作る必要があり、精度の高い回転位置検出器を用いること及び位置検出器について可動部を含め、予め定めた目標位置への設定を正確に行うことが要求されている。
本発明は、上記事情に鑑みてなされたものであり、簡易な構成で、回転位置検出器の位置設定を良好に果たすことができる電動ブレーキシステムを提供することを目的とする。
前記基準電流の通電によって前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、前記ロータ停止角度に対応するロータ停止角度データ及び前記戻しばね補正角データに基づいて前記ロータ回転位置データを補正することを特徴とする。
請求項2記載の発明は、ステータに複数相コイルを有しロータに2の倍数個の磁極を有するモータと、該モータの回転を直線運動に変換する回転−直動変換機構と、前記モータのロータの回転位置を検出するロータ位置検出器と、前記ロータ位置検出器が検出した前記ロータ回転位置から得られるロータ回転位置データを用いて前記モータを制御するコントローラと、を有し、前記回転−直動変換機構の直線運動により制動力を発生させる電動ブレーキシステムにおいて、前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度とを対応して記憶する記憶手段を有し、前記コントローラは、前記記憶手段に記憶され、所定の通電電気角で前記ロータの回転が停止する基準電流を前記ステータに通電し、前記基準電流の通電によって前記ロータが一方向に回転するように前記ロータの回転位置を変えた状態で前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させるとともに、前記基準電流の通電によって前記ロータが他方向に回転するように前記ロータの回転位置を変えた状態で前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、前記ロータ回転位置データを前記2つのロータ停止角度を平均してロータ停止角度データを求め、該ロータ停止角度データに基づいて前記ロータ回転位置データを補正することを特徴とする。
請求項4記載の発明は、ステータに複数相コイルを有しロータに2の倍数個の磁極を有するモータと、該モータの回転を直線運動に変換する回転−直動変換機構と、前記モータのロータの回転位置を検出するロータ位置検出器と、前記ロータ位置検出器が検出した前記ロータ回転位置から得られるロータ回転位置データを用いて前記モータを制御するコントローラと、を有し、前記回転−直動変換機構の直線運動により制動力を発生させる電動ブレーキシステムにおいて、前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度とを対応して記憶する記憶手段を有し、前記コントローラは、前記記憶手段に記憶され、所定の通電電気角で前記ロータの回転が停止する基準電流を前記ステータに通電し、前記基準電流の通電によって前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、前記ロータ停止角度に対応するロータ停止角度データを、前記ロータが一回転するように前記ロータの回転位置を複数箇所変えた状態で検出される複数個のロータ停止角度を平均して求め、該ロータ停止角度データに基づいて前記ロータ回転位置データを補正することを特徴とする。
請求項6記載の発明は、請求項2から5のいずれかに記載の電動ブレーキシステムにおいて、前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度との間に角度差を持たせるように前記ロータに付勢力を付与する戻しばねを有し、前記コントローラは、前記戻しばねによる前記ロータの回転トルク、前記モータヘの供給電流、及び前記モータのトルク定数に基づいて、前記戻しばねのばね力によるロータのずれ分に相当する戻しばね補正角を求め、該戻しばね補正角を前記ロータ回転位置データの補正に用いることを特徴とする。
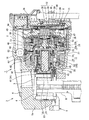
モータ11は、図5に示される後述するモータドライバ用マイコン(以下、適宜、マイコンという。)100〔コントローラ〕からの指令でロータ25を所望トルクで所望角度だけ回転させるように作動し、そのロータ25の回転角は、ケーシング部5に保持されるレゾルバステータ33aとロータ25の外周面に固定したレゾルバロータ33bとからなるレゾルバ33によって検出されるようになっている。
また、ケーシング部5内の、蓋板8に隣接する箇所には、輪状の支持板34と後述の歯車部材35とが一体的に配設されており、両者の間には、回転体29を支持する軸受36が挟持されている。
後述するU、V、W相コイルcoU、coV、coWには、電源線105を介して直流電源106が接続されるようになっている。図5は、キャリパとモータドライバとが別体となっているものを示しており、通信回路103には通信線107を介して、キャリパの外部に設けられたモータドライブ用マイコン100が接続されている。キャリパ2内の制御部材には、制御電源線108を介して制御用電源109が接続されるようになっている。メモリ104に接続されたメモリ接続線110には図6に示すように、メモリ書込み用スイッチ111が介装されている。
位置合せ用コネクタ113がコネクタに接続されることにより、通信線107、制御電源線108、及びメモリ接続線110を介した上記接続を行えるようになっている。
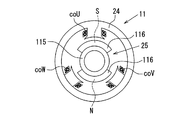
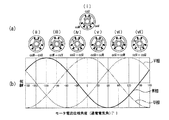
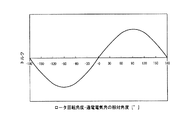
そして、U、V、W相コイルcoU、coV、coWに120°位相のずれた電流(すなわち、位相が均等にずれた電流。基準電流)を流すと、電流位相を示す通電電気角に応じてロータ25が定まる位置(ロータ25の回転位置ひいてはロータ位置角度)がある。例えば、電流位相を示す通電電気角とロータ位置角度(ロータ25の回転位置)との間には、図3(a)、(b)に示す関係がある。
また、通電電気角0°位置は、上述したように、U相コイルcoU に流れ込む電流が、V、W相コイルcoV、coWに等分に分配される電流位相に対応したものになっている。また、これと同様に、例えば図3(a)(iv)〔通電電気角30°〕では、U相コイルcoU 、W相コイルcoW間への通電〔U相コイルcoU に+電極、W相コイルcoWに−電極を接続〕又はU相コイルcoU に+電流、W相コイルcoWに−電流、V相コイルcoVに0Aの電流が通電されたことに対応したものになっている。換言すれば、U、W相コイルcoU、coW間への通電は、図3において通電電気角+30°の位置に相当する。
通常の電動ブレーキとして作動する(通常制動作動する)場合は、運転者のブレーキ操作信号の入力によりモータ11のロータ25が図1右側から見て反時計方向に回転する。すると、このロータ25と一体の偏心軸46に軸受47を介して取付けられている偏心車50が公転し、これに応じてボールランプ機構12内の第1ディスク37(回動部材)がロータ25と一定の回転比でもって反時計回りに回転する。すると、ボールランプ機構12内のボール38がボール溝40の間で転動し、これにより第2ディスク39(直動部材)が前進し、その前進運動がパッド摩耗補償機構14を構成するアジャスタ41を介してピストン10に伝達される。そして、パッド摩耗がない場合は、ピストン10が原位置からパッドクリアランスを解消する位置を経て推進して、モータ11のトルクに応じた制動力が発生し、この間、ブレーキ解除機構としても機能する戻しばね15にトルクが蓄えられる。
電動ブレーキの解除時には、運転者の解除操作に応じてモータ11のロータ25が図1右側から見て時計方向に回転し、これに応じてボールランプ機構12を構成するボール38がボール溝40の初期位置に戻る。この時、第2ディスク39にはコイルスプリング43の付勢力が作用しているので、第2ディスク39とパッド摩耗補償機構14を構成するアジャスタ41とは一体的に戻り、これに応じてピストン10が後退し、制動が解除される。この時、駐車ブレーキ機構16に対する通電が遮断されており、揺動アーム62の先端の係合つめは、モータ11のロータ25上のつめ車60からわずか係合離脱する状態を維持する。この結果、ロータ25は円滑に制動解除方向Rへ回転し、電動ブレーキの解除が保証される。
駐車ブレーキを作動させる場合は、運転者の駐車ブレーキ操作信号によりマイコン100が起動し、モータ11のロータ25が制動方向に回転し、上記した駐車ブレーキ作動時と同様にピストン10が推進して制動力が発生する。そして、制動力が所定値に達すると駐車ブレーキ機構16に対する短時間通電がなされ、続いてモータ11への通電が遮断される。そして、駐車ブレーキ機構16の揺動アーム62の先端の係合つめがモータ11のロータ25上のつめ車60の歯部(図示省略)に嵌合(係合)し、この結果、ロータ25は制動解除方向への回転が規制され、駐車ブレーキが確立する。なお、モータ11への通電を遮断した際、キャリパ2剛性の影響等によってモータ11のロータ25に図1右側から見て時計方向のトルクが発生するので、揺動アーム62の先端の係合つめはつめ車60の歯部に強く押付けられ、これにより駐車ブレーキはより安定して確立するようになる。
上記駐車ブレーキを解除する場合は、運転者の駐車ブレーキ解除操作によりモータ11への通電がなされ、電動ブレーキ作動時と同様にロータ25が制動方向へわずか回転し、駐車ブレーキ機構16のつめ車60もロータ25と一体に制動方向へわずか回転する。すると、揺動アーム62の先端の係合つめに作用していた押付力が解放される。この時、駐車ブレーキ機構16への通電が遮断されているので、前記押付力の解放に応じて図示しないねじりばねの付勢力で揺動アーム62が図1右側から見て時計方向へ揺動し、係合つめが、つめ車60の歯部から係合離脱する。その後、適宜タイミングでモータ11のロータ25を制動解除方向へ回転させれば、ロータ25は、そのつめ車60が係合つめと接触することなく制動解除方向へ回転し、これにより駐車ブレーキが解除される。
まず、位置合わせ用コネクタ113を接続し(ステップS1)、直流電源106を用意し電源線105を介してU相コイルcoU に+電圧、V相コイル及びW相コイルに−電圧を印加し、V相コイルcoV、W相コイルcoWには等分に電流が流れるようにし(ステップS2)、通電に伴いロータ25が回転したならばその停止を待つ。
この通電は図3に示す電気角0°位置〔図(a)(i)〕における通電状況に対応している。ロータ25が実際に電気角0°位置〔図(a)(i)〕における回転位置にあり、ステップS2に示すように電流が流されるならば、通電電気角とロータ回転角度との間の相対角度は0°となるはずである。
ロータ25に、目標位置に対するずれが生じていないならば、図3(a)(i)のロータ25の回転位置(ロータ回転角度)及びこれに対応する図3(b)の通電電気角が0°であるが、ステップS4でメモリ104に書込まれたロータ停止角度(レゾルバ角度)が0°以外の数値である場合、その数値は、ずれ量(目標位置に対するずれ)を示すことになる。
このように補正されたロータ回転位置データに基づいてモータ11を制御することにより、モータ11が効率よく運転されることになる。
第1実施の形態では、U相コイルcoU 、V相コイルcoV及びW相コイルcoWに通電しているが、第2実施の形態では、そのうち2つのコイル間への通電を行うことによりロータ回転位置データを補正するためのロータ停止角度(レゾルバ角度)を求めると共に、戻しばね15を設けていることによって生じるずれ量(目標位置に対するずれ)を補正するために戻しばね分補正値(戻しばね補正角)を算出し、ロータ停止角度及び戻しばね分補正値に基づいてロータ回転位置データを補正するようにしており、この点が、第1実施の形態と主に異なっている。
そして、通常制動操作時などにおいて、ロータ回転位置データに対して前記新たなロータ停止角度の加減算を行なって、ロータ回転位置データを補正し、補正されたロータ回転位置データに基づいてモータ11を制御する。
本実施の形態では、さらに、ロータ回転位置データに対して戻しばね分補正値を用いた補正を行い、戻しばねに伴って生じるずれ量(目標位置に対するずれ)についても補正を行い(すなわち、位置合わせを行い)、ずれ量の補正精度が向上するようにしている。
なお、本実施の形態では、U相、V相コイルcoU、coV間(2相コイル間)に対して通電するようにしているので、W相コイルcoW(残りの1相のコイル)に電流を流さない。このため、電流センサの誤差等の影響を受けず、通電の電気角度誤差が無くなる利点がある。
この戻しばね補正角〔式(1)〕がロータ回転位置データに対して用いられてロータ回転位置データの補正が行われる。このため、戻しばね15による角度ずれ(目標位置に対するずれ)をキャンセルすることができる。
この第2実施の形態によれば、さらに、ロータ回転位置データに対する補正をレゾルバ33で検出されるロータ停止角度と共に戻しばね補正角を用いて行うので、ずれ量(目標位置に対するずれ)の補正をより精度高く果たすことができ、効率よくモータ11の運転を行うことができる。
第3実施の形態では、図10に示すように、マイコン100がキャリパ2に内蔵された電動ブレーキシステムとなっており、マイコン100は、CANにより上位のコントローラ120に接続されている。また、U、V、W相コイルcoU、coV、coWにそれぞれ接続されるU、V、W相FET組121、122、123を備えている。U、V、W相FET組121、122、123はキャリパ2内に配置されるパワー基板125に備えられている。U相 FET組121は、直列接続されたFET121U1、121U2からなっており、FET121U1、121U2の接続部がU相コイルcoU に接続されている。V、W相コイルcoV、coW FET組122、123も、U相 FET組121と同様に構成されている。
レゾルバ33の位置合わせは、図11のフローにより実行される。
まず、FET121u1及びFET122V2をPWM制御して、電流がFET121u1からU相コイルcoU、V相コイルcoVを通してFET122V2へ流れさせる(ステップS11)。この場合、10Aの通電を1秒間行なうようにする。
モータ11の電流位相(通電電気角)に対しロータ25の定まる位置は図3に示される関係にあることは上述した通りであり、この対応関係は予め、マイコン100内のメモリに記憶されている。
図3に示すように、ロータ25の回転位置(ロータ回転角度)が30°位置はU相コイルcoU に+電流、W相コイルcoWに−電流、V相 coVは電流0Aであり〔図3(a(v))〕、これは、U相コイルcoU 及びW相コイルcoW(U相コイルcoUが+、W相コイルcoWが−)の2相コイル間に通電したのと同じ状態である。
ステップS12、S13のU相コイルcoU 及びW相コイルcoW間通電は、モータ11のステータ24、ロータ25の位置関係が30°の時のレゾルバ角度を求めたことになる。ステップS11でのU相コイルcoU 及びV相コイルcoV間通電は、図3に示す−30°位置に相当する。モータ11の発生トルクは、ロータ25の回転位置と電流の位相による角度の差により得られるが、位相差が180°ずれた場合には回転しない恐れがある。−30°位置、+30°位置に順次、通電することにより、ロータ25の初期位置がどこにあった場合でもU相コイルcoU 及びW相コイルcoW間通電時にロータ25を30°位置にすることができる。
次に、ステップS14で得た新たなロータ停止角度(レゾルバ位置ずれ角)をマイコン100内のメモリ(本実施の形態では、フラッシュROMが用いられている。)に記録する(ステップS15)。
この第4実施の形態では、まず、図3に示すように、−90°位置に相当するW相コイルcoW-V相コイルcoVに10Aの通電を1秒間、また、−30°位置に相当するU相コイルcoU -W相コイルcoWに10Aの通電を1秒間同時に行う(ステップS21)。第1実施の形態と同様に、異なる角度の位置に通電したことにより、初期のロータ25の位置によらず−30°位置になる。
ステップS21に続くステップS22で+30°位置に相当するU相コイルcoU -W相コイルcoWに通電すると、モータ11のロータ25は+60°回転する。ステップS22の通電開始の1秒後にU相コイルcoU -W相コイルcoW通電時のロータ25の回転位置をレゾルバ33で読み(ステップS23)、さらに、90°位置に相当するV相コイルcoV-W相コイルcoWに10Aの通電を1秒間行った(ステップS24) 後、再び30°位置に相当するU相コイルcoU -W相コイルcoWに通電する(ステップS25)。ステップS25では、再び30°位置に戻しており、ロータ25は−60°回転(逆回転)したことになる。
次に、ステップS27で得たレゾルバ位置ずれ角をマイコン100内のメモリ(本実施の形態では、フラッシュROMが用いられている。)に記録する(ステップS28)。
第4実施の形態によれば、位置調整時に回転方向を変えることにより、摺動抵抗等により発生する誤差を小さ<する効果がある。
この第5実施の形態では、図13に示すように、U相コイルcoU -V相コイルcoVに10Aの通電を1秒間行った後、U相コイルcoU -W相コイルcoWに10Aの通電を1秒間行い、レゾルバ33により実測されたロータ回転角度と通電電流の位相角(通電電気角)〔図3参照〕からロータ回転位置データに対する補正値を求める(ステップS31)。次にV相コイルcoV-W相コイルcoWに10Aの通電を1秒間行い、レゾルバ33による実測したロータ回転角度と通電電流の位相角からロータ回転位置データに対する補正値を求める(ステップS32)。
Claims (6)
- 3相コイルを有してY結線されるステータと2の倍数個の磁極を有するロータとを備えるモータと、該モータの回転を直線運動に変換する回転−直動変換機構と、前記モータのロータの回転位置を検出するロータ位置検出器と、前記ロータ位置検出器が検出した前記ロータ回転位置から得られるロータ回転位置データを用いて前記モータを制御するコントローラと、を有し、前記回転−直動変換機構の直線運動により制動力を発生させる電動ブレーキシステムにおいて、
前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度との間に角度差を持たせるように前記ロータに付勢力を付与する戻しばねと、
前記通電電気角とロータ位置角度とを対応して記憶する記憶手段を有し、
前記コントローラは、
前記戻しばねによる前記ロータの回転トルク、前記モータヘの供給電流、及び前記モータのトルク定数に基づいて、前記戻しばねのばね力によるロータのずれ分に相当する戻しばね補正角データを求め、
前記記憶手段に記憶され、所定の通電電気角で前記ロータの回転が停止する基準電流を前記ステータに通電し、
前記基準電流の通電によって前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、
前記ロータ停止角度に対応するロータ停止角度データ及び前記戻しばね補正角データに基づいて前記ロータ回転位置データを補正することを特徴とする電動ブレーキシステム。 - ステータに複数相コイルを有しロータに2の倍数個の磁極を有するモータと、該モータの回転を直線運動に変換する回転−直動変換機構と、前記モータのロータの回転位置を検出するロータ位置検出器と、前記ロータ位置検出器が検出した前記ロータ回転位置から得られるロータ回転位置データを用いて前記モータを制御するコントローラと、を有し、前記回転−直動変換機構の直線運動により制動力を発生させる電動ブレーキシステムにおいて、
前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度とを対応して記憶する記憶手段を有し、
前記コントローラは、
前記記憶手段に記憶され、所定の通電電気角で前記ロータの回転が停止する基準電流を前記ステータに通電し、
前記基準電流の通電によって前記ロータが一方向に回転するように前記ロータの回転位置を変えた状態で前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させるとともに、前記基準電流の通電によって前記ロータが他方向に回転するように前記ロータの回転位置を変えた状態で前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、
前記ロータ回転位置データを前記2つのロータ停止角度を平均してロータ停止角度データを求め、
該ロータ停止角度データに基づいて前記ロータ回転位置データを補正することを特徴とする電動ブレーキシステム。 - 前記モータは3相コイルを有してY結線されたものであって、
前記ロータの一方向の回転は、前記3相コイルのうち二つのコイルに対する通電と、該通電後に実施される前記二つのコイルと異なる二つのコイルに対する通電により行なわれることを特徴とする請求項2記載の電動ブレーキシステム。 - ステータに複数相コイルを有しロータに2の倍数個の磁極を有するモータと、該モータの回転を直線運動に変換する回転−直動変換機構と、前記モータのロータの回転位置を検出するロータ位置検出器と、前記ロータ位置検出器が検出した前記ロータ回転位置から得られるロータ回転位置データを用いて前記モータを制御するコントローラと、を有し、前記回転−直動変換機構の直線運動により制動力を発生させる電動ブレーキシステムにおいて、
前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度とを対応して記憶する記憶手段を有し、
前記コントローラは、
前記記憶手段に記憶され、所定の通電電気角で前記ロータの回転が停止する基準電流を前記ステータに通電し、
前記基準電流の通電によって前記ロータの回転が停止したときのロータ停止角度を前記ロータ位置検出器に検出させ、
前記ロータ停止角度に対応するロータ停止角度データを、前記ロータが一回転するように前記ロータの回転位置を複数箇所変えた状態で検出される複数個のロータ停止角度を平均して求め、
該ロータ停止角度データに基づいて前記ロータ回転位置データを補正することを特徴とする電動ブレーキシステム。 - 前記モータは3相コイルを有してY結線されたものであって、
前記複数個のロータ停止角度のそれぞれは、前記3相コイルのうち二つのコイルに対する通電後に実施される前記二つのコイルと異なる二つのコイルに対する通電後に検出されることを特徴とする請求項4記載の電動ブレーキシステム。 - 前記コイルの電流位相を示す通電電気角と前記ロータの回転位置を示すロータ位置角度との間に角度差を持たせるように前記ロータに付勢力を付与する戻しばねを有し、
前記コントローラは、前記戻しばねによる前記ロータの回転トルク、前記モータヘの供給電流、及び前記モータのトルク定数に基づいて、前記戻しばねのばね力によるロータのずれ分に相当する戻しばね補正角を求め、該戻しばね補正角を前記ロータ回転位置データの補正に用いることを特徴とする請求項2から5のいずれかに記載の電動ブレーキシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005102251A JP4711050B2 (ja) | 2005-03-31 | 2005-03-31 | 電動ブレーキシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005102251A JP4711050B2 (ja) | 2005-03-31 | 2005-03-31 | 電動ブレーキシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006283822A JP2006283822A (ja) | 2006-10-19 |
| JP2006283822A5 JP2006283822A5 (ja) | 2008-03-27 |
| JP4711050B2 true JP4711050B2 (ja) | 2011-06-29 |
Family
ID=37405962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005102251A Expired - Fee Related JP4711050B2 (ja) | 2005-03-31 | 2005-03-31 | 電動ブレーキシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4711050B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4972377B2 (ja) * | 2006-10-23 | 2012-07-11 | 日立オートモティブシステムズ株式会社 | 電動ブレーキ制御装置、及び電動ブレーキ装置 |
| JP2013017349A (ja) * | 2011-07-06 | 2013-01-24 | Akebono Brake Ind Co Ltd | ブラシレスdcモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスdcモータの制御回路 |
| KR101619606B1 (ko) | 2014-08-26 | 2016-05-10 | 현대자동차주식회사 | 차량의 레졸버 옵셋 보정시 모터 토크 제어 방법 |
| WO2016104687A1 (ja) * | 2014-12-26 | 2016-06-30 | 日立オートモティブシステムズ株式会社 | ディスクブレーキ |
| JP7186142B2 (ja) * | 2019-07-26 | 2022-12-08 | 日立Astemo株式会社 | 電動ブレーキ装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57137095U (ja) * | 1981-02-17 | 1982-08-26 | ||
| JP2000018294A (ja) * | 1998-07-02 | 2000-01-18 | Sumitomo Electric Ind Ltd | 車両用ブレーキ装置 |
| JP2004153924A (ja) * | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 永久磁石回転機 |
-
2005
- 2005-03-31 JP JP2005102251A patent/JP4711050B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57137095U (ja) * | 1981-02-17 | 1982-08-26 | ||
| JP2000018294A (ja) * | 1998-07-02 | 2000-01-18 | Sumitomo Electric Ind Ltd | 車両用ブレーキ装置 |
| JP2004153924A (ja) * | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 永久磁石回転機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006283822A (ja) | 2006-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4433047B2 (ja) | スイッチド・リラクタンス・モータ | |
| JP6080682B2 (ja) | 電動式直動アクチュエータおよび電動ブレーキ装置 | |
| JP3982739B2 (ja) | 電動パワーステアリング装置 | |
| JP4711050B2 (ja) | 電動ブレーキシステム | |
| EP2090494B1 (en) | Electric power steering device | |
| JP6439709B2 (ja) | 車両の電動制動装置 | |
| WO2016185937A1 (ja) | パーキング機能付き電動ブレーキ装置 | |
| JP2012046154A (ja) | 補助動力装置付き自転車 | |
| JP4003754B2 (ja) | リラクタンス電動機のロータ角検出装置 | |
| CN105517862A (zh) | 电动制动装置 | |
| JP2016080078A (ja) | レンジ切替装置 | |
| WO2018047516A1 (ja) | 電動駆動装置及び電動パワーステアリング装置 | |
| JP3985815B2 (ja) | 電動アクチュエータ | |
| JP6258531B2 (ja) | 電動式直動アクチュエータおよび電動ブレーキ装置 | |
| US6486658B2 (en) | Encoder for a permanent magnet sinusoidal brushless motor in an electric power steering system | |
| WO2017204099A1 (ja) | 電動式直動アクチュエータ | |
| JP2010148260A (ja) | 電動モータおよび該電動モータを備えた電動パワーステアリング装置 | |
| WO2021215158A1 (ja) | 電動ブレーキ装置 | |
| JP2004153924A (ja) | 永久磁石回転機 | |
| JP2006307761A (ja) | バルブリフト制御装置のアクチュエータ | |
| JP2006283822A5 (ja) | ||
| KR101949498B1 (ko) | 브레이크 장치 | |
| JP4502749B2 (ja) | 電動駐車ブレーキ装置および電動駐車ブレーキ装置におけるブレーキパッドの実位置推定方法 | |
| JP2022164284A (ja) | シフト装置 | |
| JP2004182061A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080206 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090902 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4711050 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |