JP4698696B2 - Valve timing control device for internal combustion engine and its controller - Google Patents
Valve timing control device for internal combustion engine and its controller Download PDFInfo
- Publication number
- JP4698696B2 JP4698696B2 JP2008077172A JP2008077172A JP4698696B2 JP 4698696 B2 JP4698696 B2 JP 4698696B2 JP 2008077172 A JP2008077172 A JP 2008077172A JP 2008077172 A JP2008077172 A JP 2008077172A JP 4698696 B2 JP4698696 B2 JP 4698696B2
- Authority
- JP
- Japan
- Prior art keywords
- internal combustion
- combustion engine
- angle
- actuator
- assembly angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Valve-Gear Or Valve Arrangements (AREA)
- Valve Device For Special Equipments (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
Description
この出願の発明は、内燃機関の吸気側または排気側の機関弁の開閉タイミングを運転状態に応じて可変制御する内燃機関のバルブタイミング制御装置に関する。 The invention of this application relates to a valve timing control device for an internal combustion engine that variably controls the opening / closing timing of an intake-side or exhaust-side engine valve of the internal combustion engine in accordance with an operating state.
この種のバルブタイミング制御装置として、次のようなものが案出されている。 As this type of valve timing control device, the following has been devised.
このバルブタイミング制御装置は、クランクシャフトにタイミングチェーン等を介して連係されたハウジング(駆動回転体)がカムシャフトの端部に回動可能に組み付けられ、ハウジングの内側端面に形成された径方向ガイドに可動案内部が径方向に沿って摺動自在に係合支持されると共に、径方向外側に突出するレバーを有するレバー軸(従動回転体)がカムシャフトの端部にボルト結合され、可動案内部とレバー軸のレバーとがリンクによって枢支連結されている。そして、前記径方向ガイドに対向する位置には、渦巻き状ガイドを有する中間回転体がハウジングとレバー軸に対して相対回動可能に設けられ、前記可動案内部の軸方向の一方の端部に突設された略円弧状の複数の突条が前記渦巻き状ガイドに案内係合されている。また、中間回転体はハウジングに対して回転を進める側にゼンマイばねによって付勢されると共に、電磁ブレーキによって回転を遅らせる側の力を適宜受けるようになっている。この装置の場合、中間回転体に操作力を付与するゼンマイばね及び電磁ブレーキと、中間回転体の回動に応じてハウジング(駆動回転体)とレバー軸(従動回転体)の組付角を回動操作するリンクと、によって組付角変更手段が構成されている。 In this valve timing control device, a housing (drive rotary member) linked to a crankshaft via a timing chain or the like is rotatably assembled to an end portion of a camshaft, and a radial guide formed on an inner end surface of the housing. The movable guide is slidably engaged and supported along the radial direction, and a lever shaft (driven rotor) having a lever protruding radially outward is bolted to the end of the camshaft, so that the movable guide The part and the lever of the lever shaft are pivotally connected by a link. An intermediate rotating body having a spiral guide is provided at a position facing the radial guide so as to be rotatable relative to the housing and the lever shaft, and is provided at one end in the axial direction of the movable guide portion. A plurality of substantially arc-shaped protruding protrusions are guided and engaged with the spiral guide. Further, the intermediate rotating body is biased by a mainspring spring toward the side where the rotation is advanced with respect to the housing, and appropriately receives a force on the side of delaying rotation by an electromagnetic brake. In the case of this device, the springs and electromagnetic brakes that apply operating force to the intermediate rotating body, and the assembly angle of the housing (drive rotating body) and lever shaft (driven rotating body) are rotated according to the rotation of the intermediate rotating body. The assembly angle changing means is constituted by the link that is operated and operated.
本発明は、前記従来の可変動弁装置の技術的課題に鑑みて案出されたもので、請求項1に記載の発明は、バルブスプリングのばね力に抗して開弁する機関弁のリフト中心の位相を制御機構の回転に応じて可変にしてバルブタイミングを制御する可変機構と、回転力を前記制御機構に伝達する電動モータと、を備えた内燃機関の可変動弁装置において、前記制御機構と電動モータとの間に、該電動モータから制御機構に回転力を伝達すると共に前記制御機構の軸心に対して径方向へ移動可能な継手機構を設けたことを特徴としている。
The present invention has been devised in view of the technical problem of the conventional variable valve operating apparatus. The invention according to
上記従来のバルブタイミング制御装置においては、内燃機関の始動時に、駆動回転体と従動回転体との組付角が機関始動に適した角度位置に近づけることができない場合があり、予め始動に適した角度位置になっていることが望まれていた。 In the above-described conventional valve timing control device, when the internal combustion engine is started , the assembly angle of the drive rotating body and the driven rotating body may not be close to the angular position suitable for engine starting, which is suitable for starting in advance. It was desired to be in an angular position.
本発明は、内燃機関の停止時に駆動回転体と従動回転体の組付角が機関始動に適した角度位置に近づけることができる内燃機関のバルブタイミング制御装置及びそのコントローラを提供しようとするものである。An object of the present invention is to provide a valve timing control device for an internal combustion engine and a controller for the same, in which the assembly angle of the drive rotor and the driven rotor can be brought close to an angular position suitable for engine start when the internal combustion engine is stopped. is there.
請求項1に記載の発明は、とりわけ、停止兆候検出手段によって検出信号が出力されたときに、最進角位置と最遅角位置の間の内燃機関の始動に適した組付角に変更するように前記アクチュエータのコイルに通電して内燃機関が停止するまでの間に前記始動に適した組付角に向けて組付角を変更し、所定時間経過後に前記始動に適した組付角に達していなくても前記アクチュエータのコイルへの通電を停止することを特徴としている。
The invention according to
この発明によれば、内燃機関が完全に停止する直前に、駆動回転体と従動回転体の組付角を電磁アクチュエータによって機関始動のための適正位置に変更することができるため、機関の再始動時には、適正な組付角でもって機関始動を行うことができる。 According to the present invention, immediately before the internal combustion engine is completely stopped, the assembly angle of the drive rotator and the driven rotator can be changed to an appropriate position for starting the engine by the electromagnetic actuator. Sometimes the engine can be started with the proper assembly angle.
また、機関が完全に停止するまでの間に機関の始動が可能な組付角まで変更できなかった場合には、機関始動時の制御によって駆動回転体と従動回転体の組付角を機関始動が可能な範囲に戻せるようにして、内燃機関を迅速かつ確実に始動することが可能になる。 If the assembly angle that allows the engine to start is not changed before the engine is completely stopped, the assembly angle between the drive rotor and the driven rotor is controlled by engine start control. Thus, the internal combustion engine can be started quickly and reliably.
次に、この出願の発明の一実施形態を、図8を参照しつつ、図1〜図7に基づいて説明する。 Next, an embodiment of the invention of this application will be described based on FIGS. 1 to 7 with reference to FIG.
この実施形態は、この出願の発明にかかるバルブタイミング制御装置を内燃機関の吸気側の動弁系に適用したものであるが、排気側の動弁系に同様に適用することも可能である。 In this embodiment, the valve timing control device according to the invention of this application is applied to the valve system on the intake side of the internal combustion engine, but can also be applied to the valve system on the exhaust side.
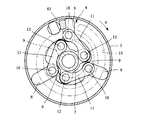
バルブタイミング制御装置は、図1に示すように内燃機関のシリンダヘッド(図示せず)に回転自在に支持されたカムシャフト1と、このカムシャフト1の前端部に結合された従動軸部材7(従動回転体)と、この従動軸部材7に必要に応じて相対回動できるように組み付けられ、チェーン(図示せず)を介してクランクシャフト(図示せず)に連係されるタイミングスプロケット2を外周に有する駆動リング3(駆動回転体)と、この駆動リング3と従動軸部材7の前方側(図1中左側)に配置され、両者3,1を相対回動させて組付角を操作する組付角変更手段4と、内燃機関の図外のシリンダヘッドとヘッドカバーの前面に跨って取り付けられて組付角変更手段4の前面と周域を覆う図外のVTCカバーと、を備えている。尚、組付角変更手段4は、回動操作力を発生する操作力発生部40と、その操作力発生部40で発生した回動操作力を駆動リング3と従動軸部材7の相対的な回転力に変換する変換機構部41と、によって構成されている。
As shown in FIG. 1, the valve timing control device includes a
駆動リング3は、段差状の挿通孔6を備えた略円板状に形成され、この挿通孔6部分が従動軸部材7(従動回転体)に回転可能に組み付けられている。そして、駆動リング3の前面(カムシャフト1と逆側の面)には、図2,図3に示すように、対面する平行な側壁を有する3つの径方向溝8(径方向ガイド)が同リング3のほぼ半径方向に沿うように形成されている。
The
また、従動軸部材7は、図1に示すように、カムシャフト1の前端部に突き合される基部側の外周に拡径部が形成されると共に、その拡径部よりも前方側の外周面に放射状に突出する三つのレバー9が一体に形成され、軸芯部を貫通するボルト10によってカムシャフト1に結合されている。各レバー9には、リンク11の基端がピン12によって枢支連結され、各リンク11の先端には前記各径方向溝8に摺動自在に係合する円柱状の突出部13が一体に形成されている。
Further, as shown in FIG. 1, the driven
各リンク11は、突出部13が対応する径方向溝8に係合した状態において、ピン12を介して従動軸部材7に連結されているため、リンク11の先端側が外力を受けて径方向溝8に沿って変位すると、駆動リング3と従動軸部材7はリンク11の作用でもって突出部13の変位に応じた方向及び角度だけ相対回動する。
Each
また、各リンク11の先端部には、軸方向前方側に開口する収容穴14が形成され、この収容穴14に、後述する渦巻き溝15(渦巻き状ガイド)に係合する係合ピン16と、この係合ピン16を前方側(渦巻き溝15側)に付勢するコイルばね17とが収容されている。尚、この実施形態の場合、リンク11の先端の突出部13と係合ピン16、コイルばね17等によって径方向に変位可能な可動案内部が構成されている。
In addition, a
一方、従動軸部材7のレバー9の突設位置よりも前方側には、円板状のフランジ壁を有する中間回転体18が軸受19を介して回転自在に支持されている。この中間回転体18のフランジ壁の後面側には断面半円状の前述の渦巻き溝15が形成され、この渦巻き溝15に、前記各リンク11の先端の係合ピン16が転動自在に案内係合されている。渦巻き溝15の渦巻きは、機関回転方向Rに沿って次第に縮径するように形成されている。したがって、各リンク11先端の係合ピン16が渦巻き溝15に係合した状態において、中間回転体18が駆動リング3に対して遅れ方向に相対回転すると、リンク11の先端部は径方向溝8に案内されつつ、渦巻き溝15の渦巻き形状に誘導されて半径方向内側に移動し、逆に、中間回転体18が進み方向に相対変位すると、半径方向外側に移動する。
On the other hand, an intermediate rotating
組付角変更手段4の変換機構部41は、以上説明した駆動リング3の径方向溝8、リンク11、突出部13、係合ピン16、レバー9、中間回転体18、渦巻き溝15等によって構成されている。この変換機構部41は、後述する操作力発生部40から中間回転体18にカムシャフト1に対する相対的な回動操作力が入力されると、その操作力が渦巻き溝15と係合ピン16の係合部を通してリンク11の先端を径方向に変位させ、このときリンク11が揺動してその揺動量に応じて駆動リング3と従動軸部材7を相対回動させる。
The
一方、操作力発生部40は、中間回転体18を駆動リング3に対して機関回転方向Rに付勢する付勢手段としてのゼンマイばね45と、中間回転体18を駆動リング3に対して機関回転方向Rと逆方向に作動させる(付勢手段に抗する力を発生する)電磁アクチュエータとしてのヒステリシスブレーキ20と、を備え、ゼンマイばね45の付勢力とヒステリシスブレーキ20の作動力とのバランスによって中間回転体18を回動操作するようになっている。尚、この実施形態においては、電磁アクチュエータの一例としてヒステリシスデレーキ20を用いたが、ヒステリシスブレーキに限らず他の形式の電磁ブレーキを採用することも可能である。
On the other hand, the
ゼンマイばね45は、駆動リング3に延設された円筒壁21にその外周端部が結合される一方、内周端部が中間回転体18の円筒状の基部に結合されている。
The
また、中間回転体18のカムシャフト1と逆側の端面には、封止壁46が一体に結合され、その封止壁46の外周面が前記円筒壁21の内面に摺動自在に密接している。
A
図1,図4に示すように、ヒステリシスブレーキ20は、非回転部材であるVTCカバーに取り付けられると共に、略円筒状の隙間を挟む対向面を備えた磁気誘導部材22と、前記対向面に設けられた内側極歯23、及び、外側極歯24と、磁気誘導部材22に取り付けられて内側極歯23と外側極歯24の間に磁界を生じさせる電磁コイル25と、前記両極歯23,24間に非接触状態で挿入配置された円筒状のヒステリシスリング26と、外周端がこのヒステリシスリング26に一体に結合された状態で中間回転体18に連結ピン47とゴムブッシュ48を介して結合された円環プレート27と、を備え、電磁コイル25がコントローラ42の出力信号によって適宜通電制御されるようになっている。
As shown in FIGS. 1 and 4, the
磁気誘導部材22の内側極歯23と外側極歯24は夫々軸方向に沿って延出する複数の極歯要素を有している。両極歯23,24の極歯要素は夫々円周方向に沿って配置され、極歯23,24の極歯要素相互は円周方向にオフセットされている。したがって、電磁コイル25が通電されると、両極歯23,24間には、オフセットした位置関係にある相手極歯要素に向かう磁界が発生する。
Each of the
ヒステリシスリング26は、磁気的ヒステリシス特性を有するヒステリシス材から成り、同リング26の回転中に内側極歯23と外側極歯24の間に磁界が発生すると、その磁界の向きとヒステリシスリング26内の磁束の向きとにずれが生じるようになっている。ヒステリシスブレーキ20は、このずれによって制動力を発生する。また、円環プレート27は、磁気誘導部材22の内周面に軸受28,29を介して支持された軸部材30に一体に結合されている。したがって、ヒステリシスリング20は、円環プレート27と軸部材30を介して磁気誘導部材22に相対回転可能に支持されている。
The
尚、図中43は、中間回転体18と駆動リング3の間に設けられ、両者18,3の相対回動範囲を規制するストッパである。
In the figure,
ここで、駆動リング3と従動軸部材7は、前記ストッパ43による中間回転体18の回動規制によって組付角が規制され、それによって両者の遅角側と進角側の最大変位位置である最遅角位置と最進角位置とが決定されているが、このバルブタイミング制御装置の場合、内燃機関の始動に適した組付角(確実な始動が可能な組付角)は前記最遅角位置と最進角位置のほぼ中間位置に設定されている。即ち、この実施形態のバルブタイミング制御装置は、吸気側の動弁系に適用されているため、時間軸に対する機関弁のリフト特性は、図8中の右側の山形の線のようになるが、このとき内燃機関の始動に適した位相(図中実線)は、最遅角位相と最進角位相のほぼ中間の位相となっている。
Here, the assembly angle of the
また、内燃機関の始動時には、駆動リング3と従動軸部材7の組付角が前述の始動に適した角度位置になっていなければならないが、この装置においては、図7のタイミングチャートに示すように、機関停止時にイグニッション・キーがオフにされた後の所定時間T1と、機関始動時にイグニッシュン・キーがオンにされて少なくとも始動モータによる機関始動(クランクキング)が完了するまでの間、コントローラ42による制御によってヒステリシースブレーキ20に所定の電流が通電され、それによって組付角が機関始動可能な角度位置に調整されるようになっている。尚、機関停止時と始動時の具体的な制御については後に詳述する。
Further, when the internal combustion engine is started, the assembly angle of the
コントローラ42には、クランクシャフトの回転角(回転位置)を検出するクランク角センサ35、カムシャフト1の回転角(回転位置)を検出するカム角センサ36、イグニッション・キーのオン・オフ状態を検出するオン・オフ検出回路37、内燃機関を循環する潤滑油の温度を検出する油温センサ38等の検出信号が入力され、コントローラ42は、これらの信号に基づいてヒステリシスブレーキ20に通電する電流を適宜制御するようになっている。尚、オン・オフ検出回路37は、イグニッション・キーがオフになったことを検出することで内燃機関が完全停止する兆候にあることを検知することができ、この実施形態の場合、このオン・オフ検出回路37がこの出願の発明における停止兆候検出手段を構成している。
The
このバルブタイミング制御装置は以上のような構成であるため、クランクシャフトとカムシャフト1の回転位相(機関弁の開閉タイミング)を最進角側に変更する場合には、ヒステリシスブレーキ20に所定の電流を通電することにより、ゼンマイばね45の力に抗する制動力が円環プレート27から中間回転体18に連結ピン47とゴムブッシュ48を介して伝達される。これにより、中間回転体18が駆動リング3に対して逆方向に回転し、それによってリンク11の先端の係合ピン16が渦巻き溝15に誘導されてリンク11の先端部が径方向内側に変位し、このとき、図3に示すようにリンク11の作用によって駆動リング3と従動軸部材7の組付角が最進角位置に変更される。
Since this valve timing control device is configured as described above, when the rotational phase of the crankshaft and the camshaft 1 (the opening / closing timing of the engine valve) is changed to the most advanced angle side, a predetermined current is supplied to the
また、クランクシャフトとカムシャフト1の回転位相(機関弁の開閉タイミング)を最遅角側に変更する場合には、ヒステリシスブレーキ20の通電をオフにすることにより、中間回転体18がゼンマイばね45の力によって機関回転方向に回転させられる。すると、渦巻き溝15による係合ピン16の誘導によってリンク11の先端部が径方向外側に変位し、このとき、図2に示すようにリンク11の作用によって駆動リング3と従動軸部材7の組付角が最遅角位置に変更される。
Further, when the rotational phase of the crankshaft and the camshaft 1 (opening / closing timing of the engine valve) is changed to the most retarded angle side, the intermediate
また、内燃機関の停止時と始動時には、前述のようにヒステリシスブレーキ20に所定の電流が通電されるが、このときの具体的な制御は、夫々図5,図6のフローチャートに示すように行われる。
Further, when the internal combustion engine is stopped and started, a predetermined current is supplied to the
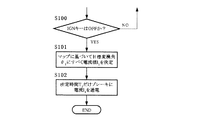
図5は、機関の運転状態に応じた通常のバルブタイミング制御の処理から続く機関の完全停止までの処理のフローを示すものであり、S100においては、イグニッション・キーがオフであるかどうかをオン・オフ検出回路37からの信号を基に判断する。このとき、オフでないと判断されたときには通常のバルブタイミング制御の処理に戻り、オフと判断されたときにはS101に進む。
FIG. 5 shows the flow of processing from the normal valve timing control processing according to the engine operating state to the subsequent complete engine stop. In S100, whether or not the ignition key is off is turned on. The determination is made based on the signal from the
S101においては、機関運転時に検出した始動時の機関回転速度と潤滑油の温度を、予めメモリに記憶させてあるマップと照合し、そのマップを基にして組付角が機関始動に適した角度位置(目標変換角θ1)となるように電流値I1を決定する。尚、内燃機関の始動に適した組付角は潤滑油の油温や機関回転速度によって変化するため、メモリ内にはこれらの相関関係がマップとして格納されている。 In S101, the engine rotation speed and the temperature of the lubricating oil detected at the time of engine operation are compared with a map stored in advance in the memory, and the assembly angle is an angle suitable for engine start based on the map. The current value I 1 is determined so as to be the position (target conversion angle θ 1 ). Since the assembly angle suitable for starting the internal combustion engine varies depending on the oil temperature of the lubricating oil and the engine speed, these correlations are stored as a map in the memory.
この後、S102においては、所定時間T1だけヒステリシスブレーキ20に電流I1を通電し、それによって組付角が機関始動可能な角度位置θ1となるように組付角変更手段4を制御する。このとき、図7のタイミングチャートの(a’)の線図に示すように、イグニッション・キーがオフにされる直前の組付角等によっては、機関が完全に停止するまでの間に組付角を目標角度位置θ1(目標変換角)まで変更できないこともあり得るが、この場合は、後述する機関始動時の制御によって対処する。尚、図7のタイミングチャートの(a)の線図は機関が完全に停止する前に組付角が目標角度位置θ1に変更される場合を示す。
Thereafter, S10 in the 2, energizes the electric current I 1 to the predetermined time T 1 by the
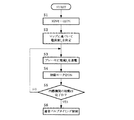
図6は、イグニッション・キーの操作によって内燃機関を始動させてから通常のバルブタイミング制御の処理に移行するまでのフローを示すものであり、S1において、イグニッション・キーをオンにし、その後に、S2において、前述のS101と同様にマップを基にして組付角が機関始動に適した角度位置θ1(目標変換角)となるように電流値I1を決定する。 FIG. 6 shows a flow from the start of the internal combustion engine by the operation of the ignition key to the transition to the normal valve timing control processing. In S1, the ignition key is turned on, and then S2 in, to determine a current value I 1 so that the angular position theta 1 assembling angle based on the map in the same manner as S101 described above is suitable for engine start (the target conversion angle).
この後、S3において、ヒステリシスブレーキ20に電流I1を通電し、次のS4において始動モータをONにする。このとき、図7の(a)に示すように機関停止時に組付角が既に目標角度位置θ1に変更されていれば、ヒステリシスブレーキ20の作動によってその組付角が維持されたままクランキングが行われ、図7の(a’)に示すように機関停止時に組付角が目標角度位置θ1まで完全に変更されていなければ、組付角がこのとき目標角度位置θ1に変更されつつクランクキングが行われる。
Thereafter, in S3, the current I 1 is supplied to the
そして、次のS5において内燃機関の始動が完了したかどうかが判断され、このとき始動が完了してしなければS3に戻り、始動が完了していれば、S6において通常のバルブタイミング制御に移行する。 Then, in the next S5, it is determined whether or not the start of the internal combustion engine is completed. At this time, if the start is not completed, the process returns to S3. If the start is completed, the routine proceeds to normal valve timing control in S6. To do.
このバルブタイミング制御装置は、以上説明したように、基本的に内燃機関の停止時に機関が完全に停止するまでの間に機関始動に適した組付角に変更、乃至は、その組付角に近付けることができるため、内燃機関の再始動時には速やかな始動を実現することができる。 As described above, the valve timing control device is basically changed to an assembly angle suitable for starting the engine until the engine is completely stopped when the internal combustion engine is stopped, or the assembly angle is changed to the assembly angle. Since it can approach, a quick start can be realized when the internal combustion engine is restarted.
さらに、この実施形態の場合、イグニッションキーをオンにしてから少なくとも始動モータをオンにしている間は、組付角を機関始動に適した角度位置に制御すべく電流をヒステリシスブレーキ20に通電するため、機関停止時に始動に適した角度位置に完全に戻すことができなかったとしても、内燃機関を確実に始動させることができる。ただし、この場合であっても機関の停止時に組付角が機関始動に適した目標角度位置に充分に近付けられているため、機関始動時には速やかに始動を完了することができる。
Further, in the case of this embodiment, the current is supplied to the
また、この実施形態の場合、組付角変更手段4は、ゼンマイばね45とヒステリシスブレーキ20の力のバランスによって組付角を操作するものであるため、クランクキング時等のカムシャフト1の回転速度がほぼ決まっている条件下においては、組付角をある角度位置に維持するのに要するヒステリシスブレーキ20の作動力(制動力)はゼンマイばね45の変形量との関係で一義的に決定される。このため、この実施形態においては、ヒステリシスブレーキ20に通電する電流値のみを管理することにより、機関始動に適した組付角に変更、乃至は保持するようにしている。したがって、この実施形態の場合、クランクシャフトとカムシャフト1の位相を逐次に検出して組付角操作を行う必要が無いため、コントローラ42による制御が容易となる。
Further, in the case of this embodiment, the assembly
ところで、以上説明した実施形態は、イグニッションキーがオフにされたときに組付角を機関始動可能な角度位置に変更するものであるが、クランクキング開始時のゼンマイばね45や駆動カムからの反力による戻りを考慮して、機関始動可能な角度位置よりも多めに組付角を変更するようにしても良い。この場合、イグニッションキーがオフにされたときにヒステリシスブレーキに通電する電流I1(制御信号)は、機関始動時の反力による組付角のずれ分を補正したものとする。 Incidentally, in the embodiment described above, the assembly angle is changed to an angular position at which the engine can be started when the ignition key is turned off. Considering the return by force, the assembly angle may be changed more than the angular position at which the engine can be started. In this case, it is assumed that the current I 1 (control signal) energized to the hysteresis brake when the ignition key is turned off is obtained by correcting the assembly angle deviation due to the reaction force at the time of starting the engine.
尚、この発明の実施形態は以上で説明したものに限るものではなく、例えば、上記の実施形態においては、組付角変更手段の操作力発生部はゼンマイばねとヒステリシスブレーキによって構成したが、操作力発生部はこれら以外の付勢手段と電磁アクチュエータによって構成するようにしても良い。また、操作力発生部は必ずしも付勢手段を用いる必要はなく、正転逆転操作ができる電磁アクチュエータを用いれば付勢手段を無くすこともできる。 The embodiment of the present invention is not limited to the above-described embodiment. For example, in the above embodiment, the operating force generating portion of the assembly angle changing means is configured by a spring and a hysteresis brake. The force generation unit may be configured by an urging unit and an electromagnetic actuator other than these. Further, the operating force generator does not necessarily need to use an urging means, and the urging means can be eliminated if an electromagnetic actuator capable of forward / reverse rotation is used.
次に、上記の各実施形態から把握し得る請求項に記載以外の発明について、以下にその作用効果と共に記載する。 Next, inventions other than those described in the claims that can be grasped from each of the above embodiments will be described below together with the effects thereof.
(イ)内燃機関のクランキング時に、内燃機関の始動が可能な組付角に変更するための制御信号を電磁アクチュエータに出力することを特徴とする請求項1または2に記載の内燃機関のバルブタイミング制御装置。
3. A valve for an internal combustion engine according to
この場合、内燃機関の停止時に、機関始動が可能な位置まで組付角を完全に戻すことができなかったとしても、始動モータの作動開始直後に組付角を即時に適正位置に戻し、速やかな機関始動を実現することができる。 In this case, even if the assembly angle cannot be completely returned to a position where the engine can be started when the internal combustion engine is stopped, the assembly angle is immediately returned to the appropriate position immediately after the start of the operation of the starting motor. Engine start can be realized.
(ロ) 内燃機関の始動が可能な組付角が、最遅角位置と最進角位置の間に設定されていることを特徴とする請求項1、2、前記(イ)のいずれかに記載の内燃機関のバルブタイミング制御装置。 (B) The assembly angle at which the internal combustion engine can be started is set between the most retarded angle position and the most advanced angle position. A valve timing control device for an internal combustion engine as described.
始動可能な組付角が最遅角位置や最進角位置にある場合には、付勢手段による付勢等によって組付角を機関停止時や始動時に比較的容易にその所定位置に戻すことができるが、始動可能な組付角が最遅角位置と最進角位置の間に設定されている場合には、その所定位置に戻すことは非常に困難になる。ところが、このバルブタイミング制御装置においては、内燃機関が完全停止する直前に組付角を機関始動が可能な位置に電磁アクチュエータの力によって戻すため、特に、始動可能な組付角が前記のように設定されている場合には、迅速な機関始動を実現するうえで有効となる。 When the startable assembly angle is at the most retarded angle position or the most advanced angle position, the assembly angle is relatively easily returned to the predetermined position when the engine is stopped or started by urging by the urging means. However, when the assembly angle that can be started is set between the most retarded angle position and the most advanced angle position, it is very difficult to return to the predetermined position. However, in this valve timing control device, the assembly angle is returned to the position where the engine can be started immediately before the internal combustion engine is completely stopped by the force of the electromagnetic actuator. When set, it is effective in realizing a quick engine start.
(ハ) 前記組付角変更手段は、駆動回転体と従動回転体の組付角を最遅角側または最進角側に付勢する付勢手段と、制御信号の入力によって前記付勢手段に抗する力を発生する電磁アクチュエータと、を備えた構成とし、前記付勢手段の付勢力と電磁アクチュエータの作動力とのバランスによって前記組付角を制御することを特徴とする請求項1、2、前記(イ)、(ロ)のいずれかに記載の内燃機関のバルブタイミング制御装置。 (C) The assembly angle changing means includes an urging means for urging the assembly angle of the drive rotator and the driven rotator to the most retarded angle side or the most advanced angle side, and the urging means by inputting a control signal. An electromagnetic actuator that generates a force that resists the assembly, and the assembly angle is controlled by a balance between an urging force of the urging means and an operating force of the electromagnetic actuator. 2. The valve timing control device for an internal combustion engine according to any one of (a) and (b).
この場合、組付角を所定角度に維持するのに要する電磁アクチュエータの作動力が付勢手段の変位との関係で一義的に決まる。したがって、駆動回転体と従動回転体の現在の組付角を逐次求めなくても、電磁アクチュエータの作動力を管理することで組付角を適正角度位置に変更または維持することが可能となる。この結果、コントローラによる制御が容易になり、製造コストの低減が可能となる。 In this case, the operating force of the electromagnetic actuator required to maintain the assembly angle at a predetermined angle is uniquely determined by the relationship with the displacement of the urging means. Therefore, it is possible to change or maintain the assembly angle at an appropriate angular position by managing the operating force of the electromagnetic actuator without sequentially obtaining the current assembly angles of the drive rotor and the driven rotor. As a result, the control by the controller becomes easy, and the manufacturing cost can be reduced.
1…カムシャフト
3…駆動リング(駆動回転体)
4…組付角変更手段
7…従動軸部材(従動回転体)
20…ヒステリシスブレーキ(電磁アクチュエータ)
37…オン・オフ検出回路(停止兆候検出手段)
DESCRIPTION OF
4 ... Assembly
20 ... Hysteresis brake (electromagnetic actuator)
37. On / off detection circuit (stop sign detection means)
Claims (3)
カムシャフトに結合され、前記駆動回転体に対して相対回動できるように組み付けられた従動回転体と、
コイルに通電することによって作動力を発生するアクチュエータと、
該アクチュエータの作動力によって前記駆動回転体と従動回転体の組付角を調整する組付角変更手段と、
前記内燃機関の完全停止の兆候が検出されたときに検出信号を出力する停止兆候検出手段と、を備え、
該停止兆候検出手段によって検出信号が出力されたときに、最進角位置と最遅角位置の間の内燃機関の始動に適した組付角に変更するように前記アクチュエータのコイルに通電して内燃機関が停止するまでの間に前記始動に適した組付角に向けて組付角を変更し、所定時間経過後に前記始動に適した組付角に達していなくても前記アクチュエータのコイルへの通電を停止することを特徴とする内燃機関のバルブタイミング制御装置。 A drive rotor that is driven to rotate by the crankshaft of the internal combustion engine;
Coupled to Kamushafu doo, a driven rotary member which is assembled to allow relative rotation against the driving rotator,
A luer actuator to generate the actuation force by energizing the coils,
An assembly angle changing means for adjusting an assembly angle of the driving rotary body and the driven rotary body by an operating force of the actuator;
And a stop sign detecting means for outputting a detection signal when the sign of complete stop of the internal combustion engine is detected,
When the detection signal output by said stop sign detection means, energizing the coil of the prior Kia actuator to change the assembling angle suitable for starting the internal combustion engine between the most retarded position and the most advanced position also does not reach to the towards the assembling angle suitable for starting to change the assembling angle, assembling angle suitable for the starting after a predetermined time elapses until the engine is stopped in the actuator A valve timing control device for an internal combustion engine , wherein energization to a coil is stopped .
カムシャフトに結合され、前記駆動回転体に対して相対回動できるように組み付けられた従動回転体と、 A driven rotator coupled to a camshaft and assembled to be rotatable relative to the drive rotator;
コイルに通電することによって作動力を発生するアクチュエータと、 An actuator that generates an actuation force by energizing the coil;
該アクチュエータの作動力によって前記駆動回転体と従動回転体の組付角を調整する組付角変更手段と、 An assembly angle changing means for adjusting an assembly angle of the driving rotary body and the driven rotary body by an operating force of the actuator;
を備えた内燃機関のバルブタイミング制御装置のコントローラであって、 A controller for a valve timing control device for an internal combustion engine comprising:
前記内燃機関の完全停止の兆候が検出されたときに検出信号を出力する停止兆候検出手段によって検出信号が出力されたときに、最進角位置と最遅角位置の間の内燃機関の始動に適した組付角に変更するように前記アクチュエータのコイルに通電して内燃機関が停止するまでの間に前記始動に適した組付角に向けて組付角を変更し、所定時間経過後に前記始動に適した組付角に達していなくても前記アクチュエータのコイルへの通電を停止することを特徴とする内燃機関のバルブタイミング制御装置のコントローラ。 When the detection signal is output by the stop sign detecting means for outputting a detection signal when the sign of the complete stop of the internal combustion engine is detected, the internal combustion engine is started between the most advanced position and the most retarded position. The assembly angle is changed toward the assembly angle suitable for the start until the internal combustion engine is stopped by energizing the coil of the actuator so as to change to a suitable assembly angle. A controller for a valve timing control device for an internal combustion engine, wherein energization to the coil of the actuator is stopped even if an assembly angle suitable for starting is not reached.
前記停止兆候検出手段によって検出信号が出力されたときは、前記内燃機関が停止するまでに前記始動に適した組付角に向けて組付角を変更するように前記アクチュエータのコイルに通電することを特徴とする内燃機関のバルブタイミング制御装置のコントローラ。 In the controller of the valve timing control device for an internal combustion engine according to claim 2 ,
When the detection signal output by the stop sign detecting means, said internal combustion engine to energize the coil of the actuator to change the assembling angle toward the assembling angle suitable for the start until the stop A controller for a valve timing control device for an internal combustion engine.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008077172A JP4698696B2 (en) | 2008-03-25 | 2008-03-25 | Valve timing control device for internal combustion engine and its controller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008077172A JP4698696B2 (en) | 2008-03-25 | 2008-03-25 | Valve timing control device for internal combustion engine and its controller |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002322218A Division JP4156346B2 (en) | 2002-11-06 | 2002-11-06 | Valve timing control device for internal combustion engine |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009118141A Division JP5379555B2 (en) | 2009-05-15 | 2009-05-15 | Valve timing control device for internal combustion engine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008190537A JP2008190537A (en) | 2008-08-21 |
| JP2008190537A5 JP2008190537A5 (en) | 2009-07-02 |
| JP4698696B2 true JP4698696B2 (en) | 2011-06-08 |
Family
ID=39750832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008077172A Expired - Fee Related JP4698696B2 (en) | 2008-03-25 | 2008-03-25 | Valve timing control device for internal combustion engine and its controller |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4698696B2 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60166705A (en) * | 1984-02-09 | 1985-08-30 | Toyota Motor Corp | Valve timing control device of internal-combustion engine |
| JPH08261027A (en) * | 1995-03-23 | 1996-10-08 | Toyota Motor Corp | Control device for internal combustion engine |
| JP2001140663A (en) * | 1999-11-19 | 2001-05-22 | Toyota Motor Corp | Valve timing control device and power output device |
| JP2002047952A (en) * | 2000-07-31 | 2002-02-15 | Toyota Motor Corp | Valve timing controller of internal combustion engine |
| JP2002089303A (en) * | 2000-09-11 | 2002-03-27 | Nissan Motor Co Ltd | Control device for internal combustion engine for vehicle |
-
2008
- 2008-03-25 JP JP2008077172A patent/JP4698696B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60166705A (en) * | 1984-02-09 | 1985-08-30 | Toyota Motor Corp | Valve timing control device of internal-combustion engine |
| JPH08261027A (en) * | 1995-03-23 | 1996-10-08 | Toyota Motor Corp | Control device for internal combustion engine |
| JP2001140663A (en) * | 1999-11-19 | 2001-05-22 | Toyota Motor Corp | Valve timing control device and power output device |
| JP2002047952A (en) * | 2000-07-31 | 2002-02-15 | Toyota Motor Corp | Valve timing controller of internal combustion engine |
| JP2002089303A (en) * | 2000-09-11 | 2002-03-27 | Nissan Motor Co Ltd | Control device for internal combustion engine for vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008190537A (en) | 2008-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3986371B2 (en) | Valve timing control device for internal combustion engine | |
| US8091523B2 (en) | Apparatus for and method of controlling variable valve timing mechanism | |
| JP2008002324A (en) | Phase angle detector and valve timing controller of internal-combustion engine using the same | |
| JP2008019757A (en) | Valve timing control device of internal combustion engine | |
| JP4156346B2 (en) | Valve timing control device for internal combustion engine | |
| JP4313704B2 (en) | Valve timing control device for internal combustion engine | |
| JP2009222036A (en) | Valve timing control device of internal combustion engine | |
| JP4295081B2 (en) | Valve timing control device for internal combustion engine | |
| JP4125999B2 (en) | Control device for variable valve timing mechanism | |
| JP4698696B2 (en) | Valve timing control device for internal combustion engine and its controller | |
| JP2003206711A (en) | Controller for variable valve timing mechanism | |
| JP5379555B2 (en) | Valve timing control device for internal combustion engine | |
| JP4606473B2 (en) | Valve timing control device for internal combustion engine, controller for the valve timing control device, and controller used for valve timing changing mechanism | |
| JP2009091928A (en) | Valve timing control device for internal combustion engine | |
| JP4163482B2 (en) | Valve timing control device for internal combustion engine | |
| JP4299164B2 (en) | Control device for variable valve timing mechanism | |
| JP4109972B2 (en) | Valve timing control device for internal combustion engine | |
| JP4109967B2 (en) | Valve timing control device for internal combustion engine | |
| JP4233308B2 (en) | Valve timing control device for internal combustion engine | |
| JP2008082343A (en) | Valve timing control device for internal combustion engine | |
| JP4076398B2 (en) | Valve timing control device for internal combustion engine | |
| JP2005299605A (en) | Valve timing control device for internal combustion engine | |
| JP2004156510A (en) | Valve timing controller of internal combustion engine | |
| JP2006274957A (en) | Valve timing control device for internal combustion engine | |
| JP2007291938A (en) | Variable valve timing device of internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090515 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090922 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110301 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4698696 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140311 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150311 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |