JP4673246B2 - 自動餌寄せ装置 - Google Patents
自動餌寄せ装置 Download PDFInfo
- Publication number
- JP4673246B2 JP4673246B2 JP2006112280A JP2006112280A JP4673246B2 JP 4673246 B2 JP4673246 B2 JP 4673246B2 JP 2006112280 A JP2006112280 A JP 2006112280A JP 2006112280 A JP2006112280 A JP 2006112280A JP 4673246 B2 JP4673246 B2 JP 4673246B2
- Authority
- JP
- Japan
- Prior art keywords
- bait
- arm
- vertical
- shaft
- upper arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 235000013305 food Nutrition 0.000 claims description 41
- 238000009395 breeding Methods 0.000 claims description 32
- 230000001488 breeding effect Effects 0.000 claims description 32
- 244000144972 livestock Species 0.000 claims description 24
- 238000003756 stirring Methods 0.000 claims description 24
- 230000003028 elevating effect Effects 0.000 claims description 7
- 238000010408 sweeping Methods 0.000 claims description 7
- 239000000835 fiber Substances 0.000 claims description 6
- 230000001154 acute effect Effects 0.000 claims description 5
- 230000004308 accommodation Effects 0.000 claims description 4
- 238000012840 feeding operation Methods 0.000 claims description 2
- 235000019629 palatability Nutrition 0.000 description 8
- 238000013019 agitation Methods 0.000 description 7
- 244000025254 Cannabis sativa Species 0.000 description 6
- 241000283690 Bos taurus Species 0.000 description 5
- 241000235935 Hilaria belangeri Species 0.000 description 4
- 238000007790 scraping Methods 0.000 description 4
- 239000000203 mixture Substances 0.000 description 3
- 239000002699 waste material Substances 0.000 description 3
- 230000003031 feeding effect Effects 0.000 description 2
- 210000003128 head Anatomy 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000008267 milk Substances 0.000 description 2
- 210000004080 milk Anatomy 0.000 description 2
- 235000013336 milk Nutrition 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000001331 nose Anatomy 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 210000002105 tongue Anatomy 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K1/00—Housing animals; Equipment therefor
- A01K1/10—Feed racks
- A01K1/105—Movable feed barriers, slides or fences
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Zoology (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Feeding And Watering For Cattle Raising And Animal Husbandry (AREA)
Description
1.家畜が散乱させた嗜好性の悪い餌Bを嗜好性の良い餌Bと攪拌・混合しながら飼育エリアA側に簡単に寄せ集めることができ、餌Bを無駄なく均等に食べさせることができる。
2.夜間であっても定期的に自動運転させられるため、飼育者の負担を軽減し、家畜の乳量を増加させることができる。
3.装置と家畜の接触による怪我や事故を防止し、家畜の安全を担保することができる。
4.畜舎内の地面上にガイドレール等を設置する必要がなく、作業時以外は収納状態に保持できるため邪魔にならず、畜舎内に重機等を乗り入れることができる、あるいはその他の作業がし易い等の効果を奏する。
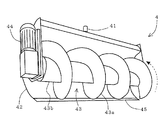
図10は、粒状あるいは粉状の餌Bを寄せ集めるのに好適な餌寄せ手段4Bの実施例2を示す斜視図である。上述したスクリューオーガ43aは、地面との間に隙間を形成して使用されるタイプのものであるため、粒状や粉状の餌Bが当該隙間をすり抜けて混ぜにくい。そこで、本実施例2の餌寄せ手段4Bの特徴は、上述した実施形態のうち、餌撹拌部43におけるスクリューオーガ43aを螺旋ブラシ43cに変更した点にある。この螺旋ブラシ43cは、水平回転軸43b周りに多数の繊維部材が螺旋状に植設されている。この餌寄せ手段4Bによれば、地面上に散在する粒状あるいは粉状の餌Bを掻き上げて攪拌・混合しながら飼育エリアA側に寄せ集めることができる。
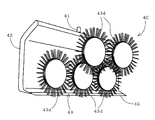
図11および図12は、量が多く、短い草等と粉状餌Bの混合物を寄せ集めるのに好適な餌寄せ手段4Cの実施例3を示す斜視図および側面図である。上述したスクリューオーガ43aは、餌Bの量が多いと十分に寄せ集められないおそれがある。また、短い草等と粉状餌Bが混じっている場合、粉状餌Bのみが下方に沈んでしまい十分に混合させられないおそれがある。そこで、本実施例3の餌寄せ手段4Cの特徴は、上述した実施形態のうち、餌撹拌部43を複数の円盤状ブラシ43dから構成した点にある。
図13は、粘り気のある餌Bを寄せ集めるのに好適な餌寄せ手段4Dの実施例4を示す斜視図である。餌Bが粘り気を含む場合、地面に付着して十分に攪拌や餌寄せ効果を得られないおそれがある。そこで、本実施例4の特徴は、上述した本実施形態のうち、餌攪拌部を1対の支持ローラ43e,43eと、コンベアベルト43fと、餌寄せ板43gとから構成する点にある。
図14は、長い草等の餌Bを寄せ集めるのに好適な餌寄せ手段4Eの実施例5を示す斜視図である。長い草等の場合、上述したスクリューオーガ43a等では、十分に攪拌したり、寄せ集められないおそれがある。そこで、本実施例5の特徴は、上述した実施例4の餌寄せ板43gに代えて、餌寄せタイン群43hを使用する点にある。
2 移動手段
3 昇降手段
4,4B,4C,4D,4E 餌寄せ手段
5 垂直揺動手段
6 制御手段
7 ガイドレール
21 基台フレーム
22 駆動用車輪
22a ガイド用車輪
22b ガイドローラ
23 駆動モータ
31 上部アーム
32 下部アーム
33 垂直アーム
34 アーム駆動部
41 連結軸部
42 餌掻きガード部
43 餌撹拌部
43a スクリューオーガ
43b 水平回転軸
43c 螺旋ブラシ
43d 円盤状ブラシ
43e 支持ローラ
43f コンベアベルト
43g 餌寄せ板
43h 餌寄せタイン群
44 攪拌モータ
45 スクレッパー
51 垂直揺動軸
52 垂直揺動駆動部
53 螺旋軸
54 螺旋軸モータ
55 ボール軸受け
56 連結部材
61 受信部
71 ストップセンサ
A 飼育エリア
B 餌
Claims (7)
- 家畜の飼育エリア外周部に沿って地面と平行に配置されたガイドレール上を移動する移動手段と、
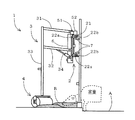
前記移動手段に、その基端部が水平軸周りおよび垂直軸周りに揺動自在に連結された上部アーム、この上部アームの下方において前記移動手段に、その基端部が水平軸周りおよび垂直軸周りに揺動自在に連結されるとともに前記上部アームの長さに等しく形成された下部アーム、前記上部アームと前記下部アームとを平行に保持してこれら各アームの先端部において水平軸周りに揺動自在に懸垂させて設けた長尺状の垂直アーム、ならびに前記上部アームおよび前記下部アームの少なくとも一方を基端部を中心に水平軸周りに揺動させて上下動させるアーム駆動部を備えた昇降手段と、
前記垂直アームの下端部に連結されており、地面に接触されながら散乱した餌を掻き集めるとともに餌こぼれを防止する収容空間を備えた餌掻きガード部、およびこの餌掻きガード部の内側に配置されて前記掻き集められた餌を攪拌しながら飼育エリア側に寄せ集める餌攪拌部を備えた餌寄せ手段と、
前記アーム駆動部を駆動することにより前記餌寄せ手段をその餌掻きガード部が地面に接触するまで下降させて作業開始位置に配備し、前記餌攪拌部を駆動することにより餌を攪拌しながら前記移動手段により前記ガイドレールに沿って作業終了位置まで移動させ、餌寄せ作業終了後に前記アーム駆動部を駆動することにより前記餌寄せ手段を家畜の頭上位置まで上昇させて退避位置に戻す制御を行う制御手段と
を有していることを特徴とする自動餌寄せ装置。 - 請求項1において、前記移動手段と前記上部アームおよび前記下部アームとの間に介在して配置され、前記上部アームおよび前記下部アームを垂直軸周りに揺動可能に軸支する垂直揺動軸と、この垂直揺動軸を揺動させる垂直揺動駆動部とを備えた垂直揺動手段を有し、前記制御手段が前記垂直揺動駆動部を駆動して前記上部アームおよび前記下部アームを垂直軸周りに揺動させ、前記餌寄せ手段と前記飼育エリアとの距離を制御することを特徴とする自動餌寄せ装置。
- 請求項2において、前記垂直揺動駆動部は、略水平方向に延在されて軸支された螺旋軸と、この螺旋軸を正逆回転させる螺旋軸モータと、前記螺旋軸に螺合されその回転に伴って前記螺旋軸上を螺進するボール軸受けと、このボール軸受けに一端を垂直軸周りに揺動可能に連結されるとともに前記垂直揺動軸に他端を固定された連結部材とを有しており、前記制御手段が、前記螺旋軸モータを駆動制御して前記ボール軸受けを前記螺旋軸上に所定量移動させることにより、前記連結部材を介して前記垂直揺動軸を揺動し、この垂直揺動軸に連結された上部アームおよび下部アームを垂直軸周りに所定量揺動させることを特徴とする自動餌寄せ装置。
- 請求項1から請求項3のいずれかにおいて、前記餌寄せ手段は、前記餌掻きガード部の横断面を略半円形状に形成するとともに、この餌掻きガード部の下端辺に餌を掃き寄せるためのスクレッパーを取り付け、前記餌掻きガード部の内側長手方向に水平回転軸を軸支し、この水平回転軸に螺旋状のスクリューオーガを設けてなることを特徴とする自動餌寄せ装置。
- 請求項1から請求項3のいずれかにおいて、前記餌寄せ手段は、前記餌掻きガード部の横断面を略半円形状に形成するとともに、この餌掻きガード部の下端辺に餌を掃き寄せるためのスクレッパーを取り付け、前記餌掻きガード部の内側長手方向に水平回転軸を軸支し、多数の繊維部材を前記水平回転軸に植設することにより螺旋ブラシを構成したことを特徴とする自動餌寄せ装置。
- 請求項1から請求項3のいずれかにおいて、前記餌寄せ手段は、前記餌掻きガード部の下端辺に餌を掃き寄せるためのスクレッパーを取り付けるとともに、前記餌掻きガード部の内側に、放射状に多数の繊維部材を植設した円盤状ブラシを正面に向けて複数軸支させており、これら隣接する円盤状ブラシ同士の回転軸間距離が当該円盤ブラシの半径以上であって直径以下の間隔にし、円盤状ブラシ同士が接触しない程度に前後あるいは上下に回転軸位置をずらして並列されていることを特徴とする自動餌寄せ装置。
- 請求項1から請求項3のいずれかにおいて、前記餌寄せ手段は、前記餌掻きガード部の下端辺に餌を掃き寄せるためのスクレッパーを取り付けるとともに、この餌掻きガード部の内側長手方向の両端に地面に対して鋭角をなす1対の支持ローラを軸支し、これら支持ローラにコンベアベルトを巻回し、このコンベアベルトの表面に回転方向に適当な間隔を隔ててベルト幅大の餌寄せ板あるいはベルト幅方向に植設された複数の餌寄せタイン群を固定したものであることを特徴とする自動餌寄せ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006112280A JP4673246B2 (ja) | 2006-04-14 | 2006-04-14 | 自動餌寄せ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006112280A JP4673246B2 (ja) | 2006-04-14 | 2006-04-14 | 自動餌寄せ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007282549A JP2007282549A (ja) | 2007-11-01 |
| JP4673246B2 true JP4673246B2 (ja) | 2011-04-20 |
Family
ID=38754877
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006112280A Expired - Fee Related JP4673246B2 (ja) | 2006-04-14 | 2006-04-14 | 自動餌寄せ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4673246B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103884824A (zh) * | 2014-04-04 | 2014-06-25 | 兰州大学 | 一种绵羊饲料适口性测定系统 |
| CN108901883A (zh) * | 2018-06-06 | 2018-11-30 | 蒙城县京徽蒙农业科技发展有限公司 | 一种畜禽养殖快速喂食装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2276335A4 (en) * | 2008-04-07 | 2016-01-20 | Delaval Holding Ab | SYSTEM AND METHOD FOR THE DISTRIBUTION OF STRAINED MATERIAL TO A BARRIER |
| KR101898707B1 (ko) * | 2013-04-26 | 2018-09-13 | 김동윤 | 축사용 이동식 사료 배합장비 |
| US20210360900A1 (en) * | 2017-08-16 | 2021-11-25 | Delaval Holding Ab | Method and system for fodder administration |
| UY37539A (es) * | 2017-12-21 | 2019-07-31 | Marichal Jose | Sistema y método para identificar, alimentar y manejar animales, en especial ganado lechero |
| CN113331081B (zh) * | 2021-06-10 | 2022-08-16 | 河南省农业科学院畜牧兽医研究所 | 一种畜牧饲养装置 |
| CN113875643B (zh) * | 2021-10-09 | 2022-11-01 | 安徽科瑞达禽业有限公司 | 一种大层叠育雏设备食槽调节板高度改进装置 |
| CN114831068B (zh) * | 2022-05-21 | 2023-04-28 | 无为县杭仁政水产养殖专业合作社 | 一种自动巡检和投食的螃蟹水池养殖设备及方法 |
| CN115039707B (zh) * | 2022-06-08 | 2024-04-19 | 阳泉测石村三牛牧业科技有限公司 | 一种人工智能的农牧业自动投料设备 |
| CN116034911B (zh) * | 2023-04-03 | 2023-06-09 | 潍坊市布恩饲料有限公司 | 一种肉鸡颗粒饲料投喂设备 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63283528A (ja) * | 1987-04-23 | 1988-11-21 | カミロ ピロヴァノ | 飼料を家禽飼育場の直線状トラフに供給するための改良トロリー |
| JPH10136822A (ja) * | 1996-11-06 | 1998-05-26 | Seibutsukei Tokutei Sangyo Gijutsu Kenkyu Suishin Kiko | 給餌設備 |
| JPH1189470A (ja) * | 1997-09-25 | 1999-04-06 | Kubota Corp | 給餌設備 |
| JP2001299122A (ja) * | 2000-04-28 | 2001-10-30 | Ishii Seisakusho:Kk | 牛舎用飼料寄集機 |
| JP2006094717A (ja) * | 2004-09-28 | 2006-04-13 | Koshin Seiki:Kk | 餌寄せ装置、及びその運転方法 |
-
2006
- 2006-04-14 JP JP2006112280A patent/JP4673246B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63283528A (ja) * | 1987-04-23 | 1988-11-21 | カミロ ピロヴァノ | 飼料を家禽飼育場の直線状トラフに供給するための改良トロリー |
| JPH10136822A (ja) * | 1996-11-06 | 1998-05-26 | Seibutsukei Tokutei Sangyo Gijutsu Kenkyu Suishin Kiko | 給餌設備 |
| JPH1189470A (ja) * | 1997-09-25 | 1999-04-06 | Kubota Corp | 給餌設備 |
| JP2001299122A (ja) * | 2000-04-28 | 2001-10-30 | Ishii Seisakusho:Kk | 牛舎用飼料寄集機 |
| JP2006094717A (ja) * | 2004-09-28 | 2006-04-13 | Koshin Seiki:Kk | 餌寄せ装置、及びその運転方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103884824A (zh) * | 2014-04-04 | 2014-06-25 | 兰州大学 | 一种绵羊饲料适口性测定系统 |
| CN103884824B (zh) * | 2014-04-04 | 2015-06-17 | 兰州大学 | 一种绵羊饲料适口性测定系统 |
| CN108901883A (zh) * | 2018-06-06 | 2018-11-30 | 蒙城县京徽蒙农业科技发展有限公司 | 一种畜禽养殖快速喂食装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007282549A (ja) | 2007-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4673246B2 (ja) | 自動餌寄せ装置 | |
| US5377620A (en) | Carousel animal feeder | |
| US6905238B2 (en) | Mixer with dissimilar augers | |
| US9125377B2 (en) | Feed device | |
| KR100978922B1 (ko) | 메추리용 사료 공급장치 | |
| JP2021112141A (ja) | 餌寄せスクレーパを備えた自動走行式ミキサー給餌機 | |
| JPH0338812B2 (ja) | ||
| US7685968B2 (en) | Livestock feed scraper | |
| US6481373B2 (en) | Programmable hay-forage feeder | |
| KR20200078123A (ko) | 주행식 사료정렬장치 | |
| CA2113512C (en) | Hay distributing apparatus | |
| EP3993614B1 (en) | A feed displacement vehicle for displacing feed on a feed table | |
| EP2903424B1 (en) | Unmanned autonomous barn vehicle for displacing feed | |
| KR20110047335A (ko) | 볏짚 자동 급이기 | |
| CN207820831U (zh) | 一种饲草自动推送机 | |
| CN213463434U (zh) | 一种输送装置及应用输送装置的鸽笼粪便清理装置 | |
| JP7367983B2 (ja) | 酪農における飼料自動調理・自動給餌設備 | |
| CN216363203U (zh) | 一种水产养殖用鱼饲料撒料组件 | |
| KR200246160Y1 (ko) | 사료 배합 장치 | |
| US4455967A (en) | Animal feeding apparatus | |
| US20150230426A1 (en) | Feed device | |
| JPH119044A (ja) | 収穫機 | |
| JP2602509Y2 (ja) | 鶏舎におけるフィーダーの羽根排除装置 | |
| FR2495892A1 (fr) | Installation pour la distribution d'aliments dans les halls d'elevage d'animaux | |
| CN118765812A (zh) | 一种猪饲养用移动式投喂装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090410 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110105 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110120 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140128 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |