JP4635789B2 - 軌道作業車両の走行装置 - Google Patents
軌道作業車両の走行装置 Download PDFInfo
- Publication number
- JP4635789B2 JP4635789B2 JP2005258083A JP2005258083A JP4635789B2 JP 4635789 B2 JP4635789 B2 JP 4635789B2 JP 2005258083 A JP2005258083 A JP 2005258083A JP 2005258083 A JP2005258083 A JP 2005258083A JP 4635789 B2 JP4635789 B2 JP 4635789B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- motor
- drive pattern
- wheel
- track
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Description
(イ) 各ユニットを共通の連結構造により着脱してパターンの組み替えを行う構成としたこと、
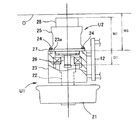
(ロ) 減速ユニットが加わる減速駆動パターンにおいて、平行に配置した車輪、モータ両ユニット間に跨って減速ユニットを配置する構成、すなわち、装置全体の幅寸法が最小となるコの字形の機器レイアウトをとることによって車両中心線よりも外側での組み替えを実現したこと
により、装置構成の転換を限られたスペース内で簡単に行うことができる。
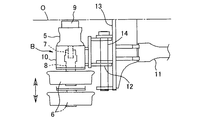
D 軌道
4,4 線路
E 走行装置
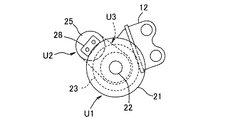
U1 車輪ユニット
21 車輪
22 車軸
23 車軸ハウジング
23a ユニット取付面
U2 モータユニット
25 モータ
26 モータ軸
U3 減速ユニット
32 減速機
29,30,31 減速機を構成する平歯車
33 減速機ハウジング
33a 減速機ハウジングのモータユニット取付面
34a 同車輪ユニット取付面
D1 減速駆動パターンにおける車輪ユニットのユニット取付面からモータ軸の先端までの距離
D2 同取付面から減速機出力軸の先端までの距離
W1 直結駆動パターンにおけるユニット取付面からモータユニットの内側端面までの距離
W2 減速駆動パターンにおけるユニット取付面から減速ユニットの内側端面までの距離
W3 ユニット取付面から車両中心線までの距離
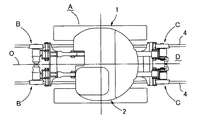
O 車両中心線
Claims (6)
- 車両中心線を挟んだ左右両側に設けられて軌道上を走行する軌道作業車両の走行装置において、装置全体を、車両本体に取付けられて軌道上で回転する車輪を含む車輪ユニットと、上記車輪の駆動源としてのモータを含むモータユニットと、上記モータの回転力を減速する減速機を含む減速ユニットとに分け、これら各ユニットを、車両中心線よりも外側で、下記(I)(II)の二つの駆動パターンに組み替え可能に構成したことを特徴とする軌道作業車両の走行装置。
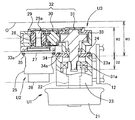
(I) 上記車輪ユニットとモータユニットを、同軸上でかつモータユニットを内側にして左右に並べ、互いのモータ軸と車軸とが直結される状態で両ユニットを着脱自在に連結した直結駆動パターン。
(II) 車輪ユニットとモータユニットを、それぞれの車軸及びモータ軸が内側を向く状態で平行に配置するとともに、この両ユニット間に上記減速ユニットを、減速機入力軸がモータ軸に、減速機出力軸が車軸にそれぞれ結合される状態で配置し、上記直結駆動パターンにおける車輪ユニットとモータユニットの連結構造と共通の連結構造によって車輪ユニットと減速ユニット、及び減速ユニットとモータユニットをそれぞれ着脱自在に連結した減速駆動パターン。 - モータユニットのモータ軸と減速ユニットの減速機出力軸とを同一径とする一方、車輪ユニットに、モータユニットまたは減速ユニットが取付けられるユニット取付面を設け、直結駆動パターンにおけるこのユニット取付面からモータ軸先端までの距離D1と、減速駆動パターンにおけるユニット取付面から減速機出力軸の先端までの距離D2とをほぼ同じに設定したことを特徴とする請求項1記載の軌道作業車両の走行装置。
- 車輪ユニットに、モータユニットまたは減速ユニットが取付けられるユニット取付面を設け、直結駆動パターンにおける車輪ユニットのユニット取付面からモータユニットの内側端面までの距離をW1、減速駆動パターンにおける上記ユニット取付面から減速ユニットの内側端面までの距離をW2として、W1≧W2に設定したことを特徴とする請求項1または2記載の軌道作業車両の走行装置。
- 車輪ユニットを、軌道幅が狭い狭軌に適応する狭軌位置と、軌道幅が広い広軌に適応する広軌位置との間で移動可能に構成し、車輪ユニットが狭軌位置にセットされた状態で各ユニットを、車両中心線よりも外側で、直結駆動、減速駆動両パターンに組み替え可能に構成したことを特徴とする請求項1乃至3のいずれか1項に記載の軌道作業車両の走行装置。
- モータとして油圧モータを用いる一方、減速ユニットの減速機を、入力側と出力側の回転方向が同じとなるように構成したことを特徴とする請求項1乃至4のいずれか1項に記載の軌道作業車両の走行装置。
- 減速駆動パターンにおいてモータユニットが車輪ユニットの上方に配置するように構成したことを特徴とする請求項1乃至5のいずれか1項に記載の軌道作業車両の走行装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005258083A JP4635789B2 (ja) | 2005-09-06 | 2005-09-06 | 軌道作業車両の走行装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005258083A JP4635789B2 (ja) | 2005-09-06 | 2005-09-06 | 軌道作業車両の走行装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007069703A JP2007069703A (ja) | 2007-03-22 |
| JP4635789B2 true JP4635789B2 (ja) | 2011-02-23 |
Family
ID=37931550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005258083A Expired - Fee Related JP4635789B2 (ja) | 2005-09-06 | 2005-09-06 | 軌道作業車両の走行装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635789B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5750330B2 (ja) * | 2011-07-25 | 2015-07-22 | 東芝テリー株式会社 | 自走式管内検査カメラ装置および管径変換ユニット |
| JP5868190B2 (ja) * | 2012-01-12 | 2016-02-24 | 軌陸車テック株式会社 | 軌陸作業車 |
| FR3049552B1 (fr) * | 2016-03-29 | 2019-05-10 | Unac | Bras d’essieu pour essieu ferroviaire, essieu ferroviaire et vehicule ferroviaire comprenant un tel bras d’essieu. |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6185567U (ja) * | 1984-11-12 | 1986-06-05 | ||
| JP3187491B2 (ja) * | 1991-11-11 | 2001-07-11 | 大淀小松株式会社 | 軌陸両用車の車輪取付装置 |
| JP2003072545A (ja) * | 2001-08-31 | 2003-03-12 | Kobelco Contstruction Machinery Ltd | 軌道用作業機 |
-
2005
- 2005-09-06 JP JP2005258083A patent/JP4635789B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007069703A (ja) | 2007-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8640812B2 (en) | Electric drive axle configuration | |
| US7124853B1 (en) | Multiwheeled modular rigid frame vehicle | |
| US9561715B2 (en) | Wheel hub with electric motor | |
| JP5837471B2 (ja) | 車両用動力伝達装置 | |
| EP0749862B1 (en) | Travelling drive device for work vehicle | |
| US7074149B2 (en) | Transmission for wheel type working vehicle | |
| JP2014098410A (ja) | 車両用動力伝達装置 | |
| JP4635789B2 (ja) | 軌道作業車両の走行装置 | |
| FI4276252T3 (en) | Mobile working machine, in particular wheel loader, with an electric drive motor | |
| US6779617B1 (en) | Multiwheeled modular rigid frame vehicle | |
| EP2189308A1 (en) | Work vehicle | |
| JP4987961B2 (ja) | クローラ走行装置用の多重駆動装置 | |
| JPS6181819A (ja) | 乗用作業機の動力伝達装置 | |
| JP5073088B1 (ja) | バックホーローダ | |
| CN220517901U (zh) | 履带桥结构 | |
| CN116062026A (zh) | 多轮行走机构同步驱动转向系统 | |
| JP4805654B2 (ja) | クローラ型トラクタ | |
| RU187174U1 (ru) | Автогрейдер | |
| CN223885655U (zh) | 遥控多功能田园管理机 | |
| CN121341303A (zh) | 一种履带底盘及森林开带机 | |
| JP3771112B2 (ja) | 作業車用トランスミッション | |
| CN211202857U (zh) | 一种车辆、变速器及其换挡塔 | |
| CN110667702A (zh) | 工程车的摆臂结构以及工程车 | |
| CN116901618A (zh) | 履带桥结构 | |
| JP4869836B2 (ja) | クローラ式作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20070821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070822 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100630 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635789 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |